農業機械自動駕駛系統軌跡跟蹤誤差測試
2020-04-23 13:38:28莫中秋
無線電工程 2020年5期
萬 豪,莫中秋,張 宇
(1.中國電子科技集團公司第五十四研究所,河北 石家莊 050081;2.中國衛星導航定位應用管理中心,北京 100088;3.西安衛星測控中心,陜西 西安 710043)
0 引言
隨著北斗衛星導航系統[1]的全面建設以及導航技術的不斷發展,衛星導航已經在各行各業應用中百花齊放[2]。中國作為農業大國,衛星導航在農業生產中已經取得了廣泛應用[3],但農業機械的自動駕駛作業還處于初級階段[4],目前國內已經出現一批自主研發的基于高精度GNSS定位的農業機械衛星導航自動駕駛產品[5],這些產品質量的優劣直接影響到自動駕駛系統的農業作業質量。
2018年,中國農業機械工業協會發布標準T/CAAMM 13-2018《農業機械衛星導航自動駕駛系統前裝 通用技術條件》[6],軌跡跟蹤誤差[7]作為農業機械衛星導航自動駕駛系統的重要技術指標,是自動駕駛系統能否按照既定路線執行作業任務的重要保證,直接關系到作業質量和精度。
軌跡跟蹤誤差有2種表現形式:軌跡跟蹤最大誤差和軌跡跟蹤平均誤差。軌跡跟蹤最大誤差指在穩態軌跡跟蹤階段,作業機具中心點相對于當前導航線的橫向偏移誤差絕對值的最大值。軌跡跟蹤平均誤差指在穩態軌跡跟蹤階段,作業機具中心點相對于當前導航線的平均橫向偏移誤差的絕對值。
為了驗證該標準提出的技術指標是否合理,測試方法是否可行,采用實車安裝農業機械衛星導航自動駕駛系統對該指標進行測試和分析。
1 測試環境和樣品選取
選取了2種測試場地:一種為平整、寬闊的水泥硬化場地,面積約150 m*80 m;一種為相對平整的農田地(如圖1所示),傾斜度在3°以下,面積約160 m*50 m;前者用于測試軌跡跟蹤性能指標,后者用于測試帶機具狀態下的作業性能指標。2種場地周圍環視高度角10°以上均要求無障礙物遮擋,同時周圍無明顯影響測試的電磁干擾和機械振動。
測試場地附近具備標定的RTK基準位置(如圖2所示)和數據通信鏈路,滿足短基線場環境,標定的基準位置WGS84坐標分量絕對精度應優于0.01 m,相對測量精度優于1 mm。

圖1 測試場地(農田地)

圖2 RTK基準位置
測試樣品選取了狀態良好的拖拉機,裝配有輔助自動駕駛系統,安裝可靠、完成系統調試工作且各項指標正常,同時完成各種作業的農機具調試且技術狀態良好。輔助駕駛系統為電動方向盤系列輔助駕駛系統設備。
2 測試過程及結果分析
2.1 測試方法及步驟
在試驗場地內,啟動自動駕駛系統直線行駛模式,拖拉機在行駛前,在自動駕駛系統顯示界面上設置當前停放點為A點,使用高精度基準標定A點的三維坐標,起動拖拉機開始以2.0±0.2 m/s手動操作使其沿直線行駛約80 m后暫停,在顯示界面上設置當前點為B點,同樣使用高精度基準標定B點的三維坐標。
以A,B為端點、作業間距為2.4 m設置自動駕駛的導航線(一組平行線),將拖拉機手動掉頭,使機頭基本重合B點。點擊顯示界面上的自動駕駛按鈕,拖拉機開始以4.0±0.2 m/s的速度從B行駛到A,實時記錄高精度基準系統[8]采集的拖拉機實際軌跡點(數據采樣率設置為10 Hz)。再次手動掉頭后,同樣啟動自動駕駛,沿AB線相鄰平行的另一條導航線行駛到B一側,如此往復3次。
分別在水泥硬化場地、農田熟地不帶機具和農田熟地帶機具3種工況作業模式下,操作農機重復以上作業步驟,行駛軌跡如圖3所示,各自統計軌跡跟蹤誤差,對結果進行統計及分析。

圖3 行駛軌跡(Google地圖)
2.2 測試結果統計及分析
作業軌跡數據采集以10 Hz數據刷新率在線存儲,利用Novatel后處理軟件Inertial Explorer 8.70(簡稱IE工具)進行緊耦合處理[9],最后輸出符合NMEA-0183協議[10]的GGA文件。通過高精度基準系統標定的A,B點水平方向的坐標,確定直線方程ax+by+c=0。
選定水泥硬化場地、農田熟地不帶機具和農田熟地帶機具3種工況作業的穩定作業區段,行駛軌跡點采集如圖4所示。

圖4 行駛軌跡點采集
按式(1)計算實際采樣點到AB直線的水平距離,并以不同統計方法統計各自直線軌跡跟蹤偏差,如圖5所示。
(1)

圖5 軌跡跟蹤誤差統計圖
由統計結果不難看出,水泥硬化場地中拖拉機的軌跡跟蹤平均誤差能滿足標準要求,但隨著拖拉機行駛,軌跡存在逐漸偏離的趨勢。相比硬化區域,農田熟地不帶機具的軌跡跟蹤平均誤差明顯變大,均方根誤差也變大,難以滿足標準上的要求。帶機具之后,軌跡跟蹤誤差相比不帶機具,也有增大趨勢。軌跡跟蹤誤差測試結果如表1所示。
表1 軌跡跟蹤誤差測試結果
Tab.1 Test results of trajectory tracking error
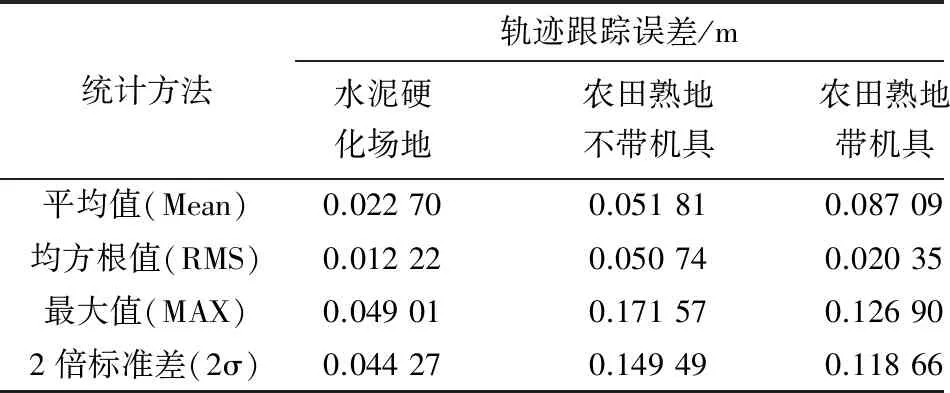
統計方法軌跡跟蹤誤差/m水泥硬化場地農田熟地不帶機具農田熟地帶機具平均值(Mean)0.022 700.051 810.087 09均方根值(RMS)0.012 220.050 740.020 35最大值(MAX)0.049 010.171 570.126 902倍標準差(2σ)0.044 270.149 490.118 66
3 測試問題分析及措施
3.1 導航線
按一般使用情況,農機自動輔助駕駛系統在規劃第1條作業航線時,起點和終點都采用實時獲取的方式(而非標定輸入),也就是說,導航線2個端點一般按實時采集位置的均值獲得,位置精度與采集時間的長短關系較大,經實際驗證,推薦起點和終端的采集時間在10 min以上。
3.2 測量設備天線安裝
輪式拖拉機上安裝自動駕駛系統時,一般為測向的需要,導航主從天線常安裝于機頭兩側,而以主天線獲取的實時位置確定前航線端點,該端點并非農機作業的行駛中心。檢測過程中如果以此為基準計算作業軌跡跟蹤誤差,就會人為地引入計算誤差,在實際檢測時,應將端點和行使中心之間的固定距離進行測算,并消除該固定值。
3.3 作業邊界
標準中要求農機軌跡跟蹤平均誤差為2.5 cm,測試中如果采用人工測量的方法,則對作業邊界的目測識別提出了極高要求,而在農田熟地中作業邊界難以有識別基準的情況下,會引入厘米級以上的測量誤差[11]。準確測量的方法是使用自動化的軌跡采集系統和配套的數據后處理工具。
3.4 檢測基準
軌跡跟蹤平均誤差2.5 cm也對測量的儀器設備精度提出較為嚴格的要求。按目前導航產品技術發展現狀,實時動態RTK定位精度的最優值為±(10+1×D) mm(靜態環境可以滿足6~8 mm、相對精度可以滿足3~5 mm),同時實時動態RTK[12]定位精度值與基線長度、當前載體速度和周圍環境等因素關系密切。所以檢測基準的選取不當,對軌跡跟蹤誤差的測量精度會造成影響。
檢測基準最佳的選擇是高精度組合導航系統[13]和先進IE后處理技術。組合導航系統中利用緊耦合技術,既能保證在GNSS系統不可靠的情況下利用慣導數據不間斷得到高精度位姿信息,又能保證在慣性導航系統[14]誤差變大時,利用GNSS對慣導系統進行修正來持續輸出高精度位置信息[15],在工況條件不好或受干擾的情況下確保數據的可靠性和連續性。
IE后處理技術是利用動態后處理差分(Post-Processing-Kinematic,PPK)技術[16],相比實時RTK技術,其在處理中使用了精密星歷[17],利用了低速平滑技術,消除了差分鏈路的誤差,同時利用同周期歷元處理[18]的算法提高了位置解的固定率。使得其位置精度比實時RTK高出1/3以上。更為重要的是,它在數據更新率上,有更多的選擇性,能滿足各種動態速度的要求。
3.5 檢測場地
輪式拖拉機輔助自動駕駛系統在檢測中需要的場地相對比較簡單,只要面積、平整度符合要求的農田熟地即可,同時熟地周圍不應存在林蔭、高山和湖面,不需要過多的場地專業建設。目前高精度組合導航系統已具備便攜設備,在測量精度和可靠性方面也完全可以保證,測試場地的高精度基準位置標定技術[19]也已成熟,只需攜帶測試設備和配套的工裝等就可赴現場測試,從根本上解決對檢測場地的過分依賴問題和整機長途跋涉的困境。
4 結束語
對農業機械衛星導航自動駕駛系統的軌跡跟蹤誤差指標進行了實際測量與分析,水泥硬化場地中,拖拉機的軌跡跟蹤平均誤差能滿足標準要求,而農田熟地中的軌跡跟蹤偏差卻難以滿足標準上的要求。同時,對測試中存在的問題進行了分析,并給出了應采取的相應措施。下一步,將針對T/CAAMM 13-2018《農業機械衛星導航自動駕駛系統前裝通用技術條件》標準的軌跡跟蹤誤差指標要求及測試方法進行討論分析。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08