一種簡式的遙控開門裝置
2020-04-24 00:22:18謝瑞龍姚順穆仕強金鑫潘國林
科技風 2020年12期
關鍵詞:設計
謝瑞龍 姚順 穆仕強 金鑫 潘國林

摘 要:門一直在人類發(fā)展史上起著重要的作用,能夠使人與外部環(huán)境向隔離以達到一些目的,比如說取暖,防御等重要作用。隨著社會的發(fā)展,門也經(jīng)歷的許多變化。從最開始的木門到現(xiàn)在的鐵門經(jīng)過許多的變化,逐漸到了一個成熟的類型。但開門的機制還是以拉動門栓而到達目的的結構,還出現(xiàn)了許多基于電信號來控制開門的裝置,比如:遙控,指紋,人臉識別等。
關鍵詞:曲柄連桿;電機開鎖;設計
隨著人們生活條件的提升,越來越多的自動開門裝置出現(xiàn)在了我們的眼前。有些自動開門的裝置既方便又美觀,贏得了廣大消費者的喜愛。但是面對琳瑯滿目的自動開門裝置該如何選擇,讓消費者們感到茫然。對此,我們設計了一個專門應用于學生宿舍的開門裝置。這個開門裝置的想法來源于我們在日常在學校的生活中,各個宿舍的同學之間熟悉起,互相逛寢室也成為了一種習慣。但是,寢室門不是隨時都開著的,敲門自然要去開門,但如果我們正在忙一些走不開的事情呢?如果這時有人來,開不開門就成了一個難題,去開門又會耽誤我們此刻手上的工作,宿舍門的開關成為了我們目前的一個難題。所以這個想法就是為了我們在做其他事情的時候能夠更快速地為他們開門。
一、基本原理
通過大量的分析和實際的考察,我們選擇連桿機構和皮帶輪機構來作為動力裝置。
二、拉動門栓機構(皮帶輪機構)
我們最初選擇凸輪機構和輪帶機構。根據(jù)不同環(huán)境的分析,我們最終選擇了最適合我們裝置的皮帶輪機構。凸輪雖然能夠高效的完成目的,但要求精度很高,一旦達不到這種精度,就不能夠完成工作。同步輪雖然能夠較好的完成工作,但是相對的所占的體積也會變大。但輪帶的容錯性相對于凸輪而言比較高,沒有太高的精度要求,而且能夠簡單的完成拉動門的工作。主體結構如圖2、圖3。
如圖4,在輪中央打一帶鍵槽的孔,以達到將輪與電機相互固定的目的。
如圖5,在輪上打一通孔,將皮帶用自攻螺絲固定于槽中,達到輪與皮帶同步轉動的目的。
三、拉動門裝置(連桿機構)
對與裝置的執(zhí)行開關門的執(zhí)行機構。最先提出的小車方案:在門上安裝小車,利用小車的前進或者后退來帶動門的旋轉,以此來達到開關門的目的;這種方案有著明顯的缺點。
(1)小車與門的連接困難。
(2)小車與地面的接觸程度難以調(diào)整,可能不能提供足夠的供小車移動帶動門旋轉摩擦力。
(3)小車在復雜凹凸類型地面的移動不理想。
(4)方案設計復雜。
(5)成本過高。
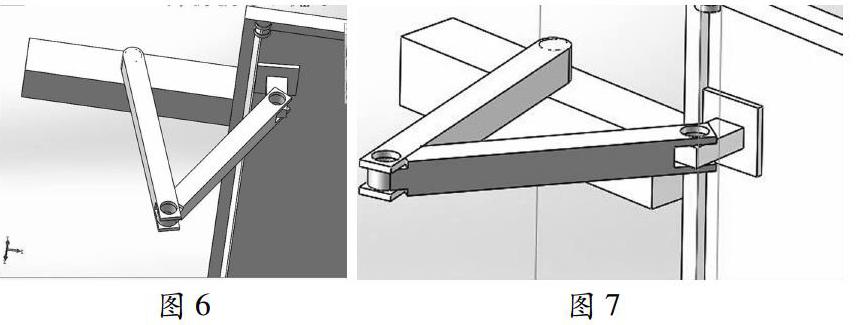
因此,開門執(zhí)行機構采用連桿機構(曲柄搖桿);通過在門頂部與墻體間安裝曲柄連桿機構來達到門的開關動作。如圖6。
連桿與門連接處到門框的水平距離為曲柄(整轉副),與電機連接的桿與搖桿(擺動副),電機與搖桿的連接點到門框的水平距離為機架連接曲柄和搖桿的桿在運動過程中做平面一般運動。當門鎖打開后與搖桿連接的電機通電開始運作,搖桿開始做擺動,開門時電機帶動搖桿朝遠離門的方向緩慢擺動;關門時電機帶動搖桿緩慢轉動回到原來的的位置。再通過連桿的傳動后曲柄做一定角度的旋轉運動,旋轉的角度區(qū)間位于0到180之間。
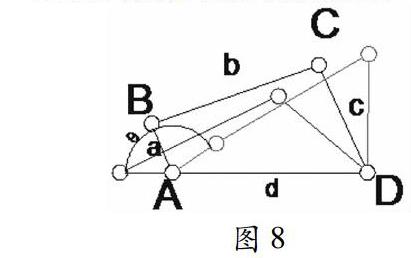
利用CAD繪制出執(zhí)行機構簡圖如圖8。
AD為機架;AB為曲柄(門的一部分);BC為連桿;CD為搖桿。圖中θ為門旋轉的角度,門在閉合的狀態(tài)時用圖中紅色連桿表示;門在開啟狀態(tài)時用圖中的黃色連桿表示。
為了便于安裝執(zhí)行機構必須做到所占空間盡可能地小,經(jīng)過實地測量門的各種數(shù)據(jù)設計機架AD的距離為40cm;曲柄AB的距離為15cm,設計其為四桿中最短桿。在實際生活中θ不用到達180°,所以取θ最大角度為150°則此時搖桿與墻體垂直。
得到:
因這平面四連桿機構為曲柄搖桿所以連桿最長為35cm。
根據(jù)四連桿有曲柄的約束條件:最長桿長度+最短桿長度≦其余兩桿長度之和。
則:
在圖中黃色連桿所構成的三角形中,由幾何關系知:
四、結語
總的來說,自動化裝置的設計多樣化在一定的程度上是來源于自動化技術的興起。而自動化技術的發(fā)展?jié)摿涂臻g非常廣泛,在外觀、細節(jié)、功能和技術等方面上都可以得到更多的提升,在這些可變的前提下才能滿足更多當代人的需求。因此我國在未來發(fā)展的方向中,需要不斷地在自動化方向中去創(chuàng)新,去探索,為自動化的發(fā)展提供源源不斷的動力。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
