GPS多接收機組合的共視時間比對技術研究
2020-04-29 05:13:56董紹武武文俊王威雄袁海波
宇航計測技術 2020年1期
張 健 董紹武 武文俊 王威雄 郭 棟 袁海波
(1.中國科學院國家授時中心,陜西西安 710600;2.中國科學院大學,北京 100049;3.中國科學院時間頻率基準重點實驗室,陜西西安 710600;4.中國科學院大學天文與空間科學學院,北京 100049)
1 引 言
當前國際標準時間是協調世界時(UTC)[1],遠距離高精度時間比對是UTC計算的主要環節之一,1980年Allan將GPS共視法(GPS CV)這項技術用于高精度時間傳遞,1983年被國際時間局(BIH)用于UTC的計算[2],為便于觀測數據交換,以及提高共視比對精度,1994年,Allan等人在Metrologia發表的“GPS定時接收機軟件標準化技術指南”,統一了共視接收機軟件的處理過程和觀測文件的格式。隨著科技的迅速發展,諸多行業對時間比對精度提出了更高要求。BIPM的Zhiheng Jiang等人研究表明單接收機鏈路存在長期的不穩定性[3],為了進一步提高GPS共視在時間比對中的各項性能指標,國內外諸多學者對各種組合方式開展了研究,Zhiheng Jiang等人對多手段(GPS和TWSTFT)組合進行試驗和性能分析[4],Aurelie Defraidne和Pascale Defraigne對多GNSS系統(GPS+GLONASS)組合進行了研究試驗[5]。近年來,多接收機組合也成為時間比對技術的研究方向之一,我國臺灣地區中華電信股份有限公司(TL)的林信嚴等人提出多接收機系統模型[6],建立了TL與日本國家信息與通信技術研究所(NICT)多接收機短基線時間比對鏈路,分析多接收機鏈路比對結果。
本文基于中科院國家授時中心(NTSC)和德國物理技術研究院(PTB)各自保持的國家時間基準[7],利用NTSC的兩臺接收機組成一個多接收機系統,利用PTB的三臺接收機組成另一個系統,進行多接收機組合的長基線時間比對鏈路(NTSC-PTB)試驗,并對結果進行分析與評估。
2 GPS共視原理
GPS共視的基本原理是兩個站同時觀測一顆或多顆GPS衛星,GPS接收機可以獲得地面和衛星之間的偽距觀測值,對偽距觀測值中的對流層時延、電離層時延和Sagnac效應等進行修正后,得到本地系統時間和GPS系統時(GPST)之間的時間偏差,將兩站數據進行交換并作差可得兩站的時間比對結果,其原理如圖1所示。
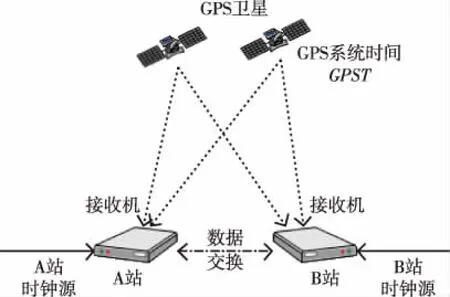
圖1 GPS共視原理圖Fig.1 principle of GPS CV
假設A站的時間為tA,B站的時間為tB,GPS系統時間為GPST,即
ΔtA=tA-GPST
(1)
ΔtB=tB-GPST
(2)
用式(1)減式(2)可得兩地的時間偏差為
ΔtA-ΔtB=tA-GPST-tB+GPST
=tA-tB=ΔtAB
(3)
3 多接收機系統模型及數據處理流程
為提高GPS共視時間比對精度,理想情況下,需研究所有噪聲的類型并消除它,但實際上總存在一些延遲無法完全消除,只能利用現有技術手段基礎盡量消弱它。本文基于多接收機組合技術,對兩個守時實驗室各自的多臺接收機進行組合,利用NTSC的兩臺接收機(在BIPM的編號分別為NTP1和NTP3)組成一個多接收機系統,命名為NTE1,利用PTB的三臺接收機(在BIPM的編號分別為PT03、PT07和PT09)組成另一個系統,命名為PTE1,建立多接收機系統時間比對,接收機輸入的時頻信號源分別來自UTC(NTSC)和UTC(PTB)。原理如圖2所示。
多接收機系統數據處理的具體方法首先讀取A地和B地兩個實驗室多臺接收機各自的觀測數據,并提取A地和B兩地觀測數據中PRN、MJD和STTIME相同的REFGPS值,采用接收機數據融合技術,得到A、B兩地多接收機系統的觀測數據,利用多接收機系統時間比對將兩地數據進行交換并作差即可得到兩地鐘差。數據處理流程圖如圖3所示。多接收機系統本地時與GPS時的時間差(REFGPS)是組合中所有經過校準的接收機的REFGPS值等權平均的結果,它的總延遲也會平均化,由于多接收機系統的觀測值數量是單接收機的好幾倍,而且觀測值來自不同的接收機,因此,可以有效地減小觀測環節帶來的不確定度,所以認為多接收機系統時間比對結果的精度優于單接收機是合理的。
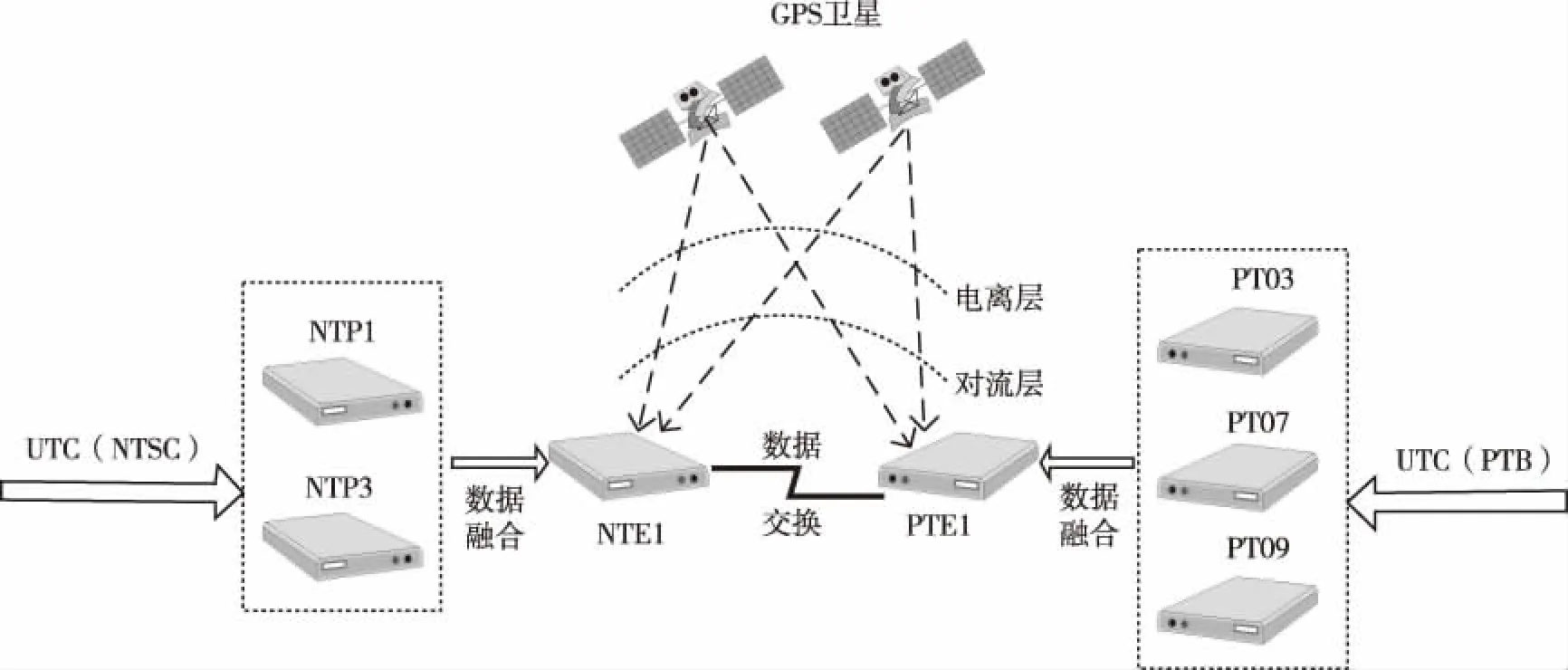
圖2 多接收機系統時間比對原理圖Fig.2 Comparison principle of multiple receiver system time
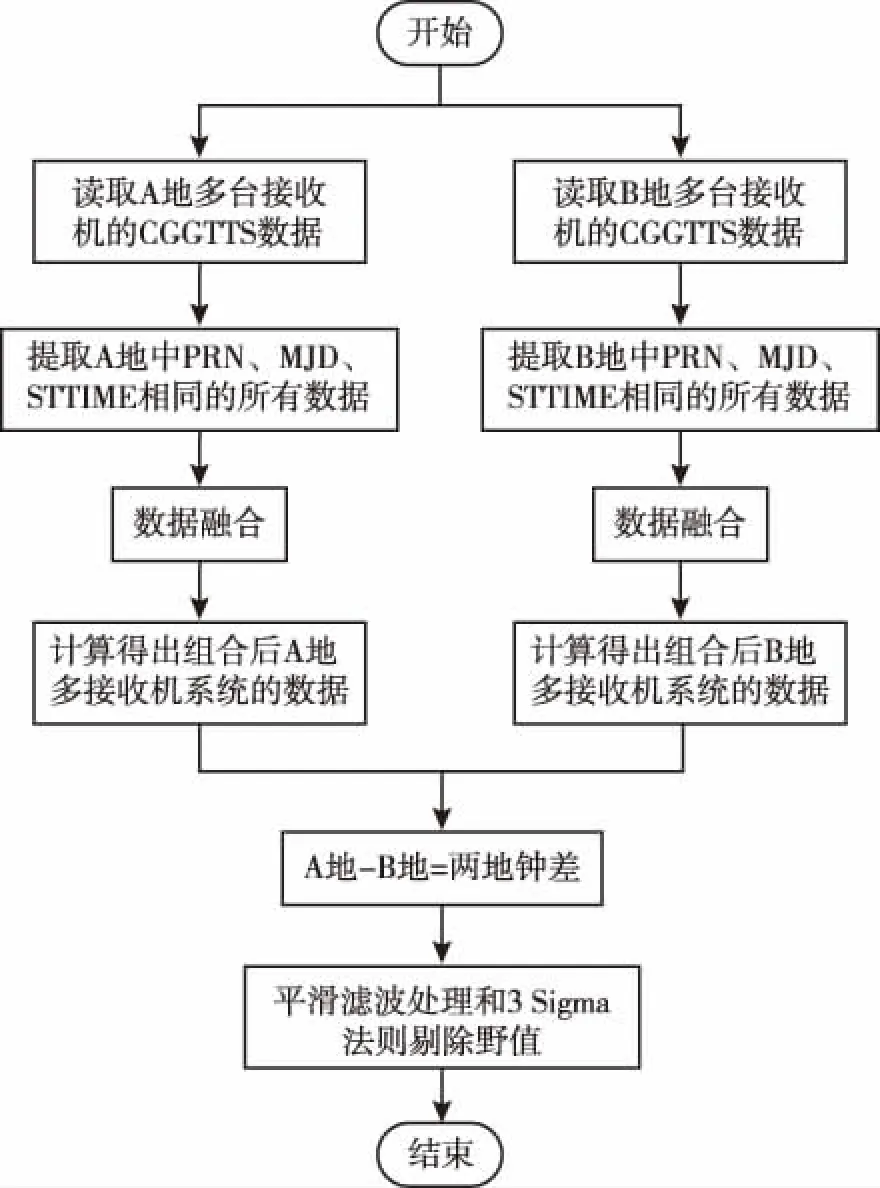
圖3 數據處理流程框圖Fig.3 Flow diagram of data processing
4 誤差改正及數據處理
時間比對過程中,信號從GPS衛星傳播到地面接收機受到多個因素的影響[8],主要包括電離層時延、對流層時延和Sagnac效應等[9-11]。本文采用雙頻消電離層組合的方法對電離層時延進行修正,采用NATO模型對對流層時延進行修正,通過衛星坐標改正公式對Sagnac效應進行修正,對各個誤差項建模修正后,再利用Vondrak濾波和3Sigma法則對結果進行降噪處理和異常值剔除。
4.1 電離層修正
對于雙頻接收機用戶,采用L1/L2雙頻消電離層組合偽距公式來修正電離層時延引起的誤差[12],如式(4)所示
(4)
其中,
式中:PR——修正后的雙頻偽距觀測值;PR1,PR2——在LI和L2頻段上的偽距觀測值;fL1,fL2——L1和L2的頻率1 575.42MHz和1 227.6MHz。
整理得到
(5)
4.2 對流層修正
修正對流層時延采用NATO模型,計算方法如式(6)所示
Δttro=f(e)·ΔR(h)
(6)
其中,
(7)
(8)
式中:f(e)——與衛星高度角e相關的表達式;ΔR(h)——觀測點天頂方向的總時延;h——接收機天線的海拔高度。
式(8)中,Ns=324.8,ΔN=-7.32e0.005577Ns,Nslog=ln((Ns+ΔN)/105)
4.3 Sagnac效應
通過衛星坐標改正公式消除Sagnac效應帶來的影響,如式(9)所示
(9)
式中:(xs,ys,zs)——修正前的衛星坐標;(x′,y′,z′)——修正后的衛星坐標;α=ωτ——信號傳播時地球轉過的角度;ω——地球自轉的角速度;τ——信號在空間中的傳播時間。
4.4 數據處理
采用Vondrak濾波方法[13],對兩地時間實驗室的GPS共視比對結果進行濾波降噪。Vondrak平滑方法的原理如下[14]
設觀測資料x(ti)(i=1,2...N),Vondrak平滑的基本準則為
Q=F+λ2S=min
(10)
式(10)中,
(11)
(12)
(13)
式中:x′i——待求的平滑值;pi——測量數據的權重;F——Vondrak平滑方法的擬合度;S——反映了待求平滑曲線總體上的平滑程度,即平滑度。

(14)
5 實驗結果及分析
為驗證多接收機組合系統的時間比對性能,選取2019年7月15日至24日(MJD:58680~58689)的GPS共視觀測數據,開展相關試驗研究,并對數據進行分析評估。兩個守時實驗室接收機的編號及類型見表1。

表1 接收機的編號及類型Tab.1 Receiver number and type實驗室實驗室編號接收機類型NTSCNTP1POLARX4TRNTP3POLARX4TRPTBPT03ZX-II3TPT07GTR50PT09POLARX4TR
5.1 零基線共鐘比對
為測試GNSS接收機性能,對兩地連接不同天線的多臺接收機,進行零基線共鐘(CCD)比對研究,零基線共鐘比對結果如圖4至圖7所示。
計算圖4至圖7的結果可得,零基線共鐘比對結果的標準偏差(STDEV)分別為0.79ns,1.43ns,1.84ns,1.90ns。
5.2 共視結果及分析
共視時間比對時,可視衛星數會影響時間比對的精度。在相同時刻下,NTSC和PTB同時觀測到的衛星個數如圖8所示。NTSC與PTB之間的單接收機鏈路和多接收機鏈路的共視比對結果如圖9至圖12所示,分別是比對鏈路PT03-NTP1,PT07-NTP3,PT09-NTP1和PTE1-NTE1的共視時間比對結果,圖中點代表原始值,線表示使用Vondrak平滑濾波后的結果。

圖4 NTP3-NTP1零基線鐘差示意圖 圖5 PT07-PT03零基線鐘差示意圖 Fig.4 Zero baseline clock difference of NTP3-NTP1 Fig.5 Zero baseline clock difference of PT07-PT03
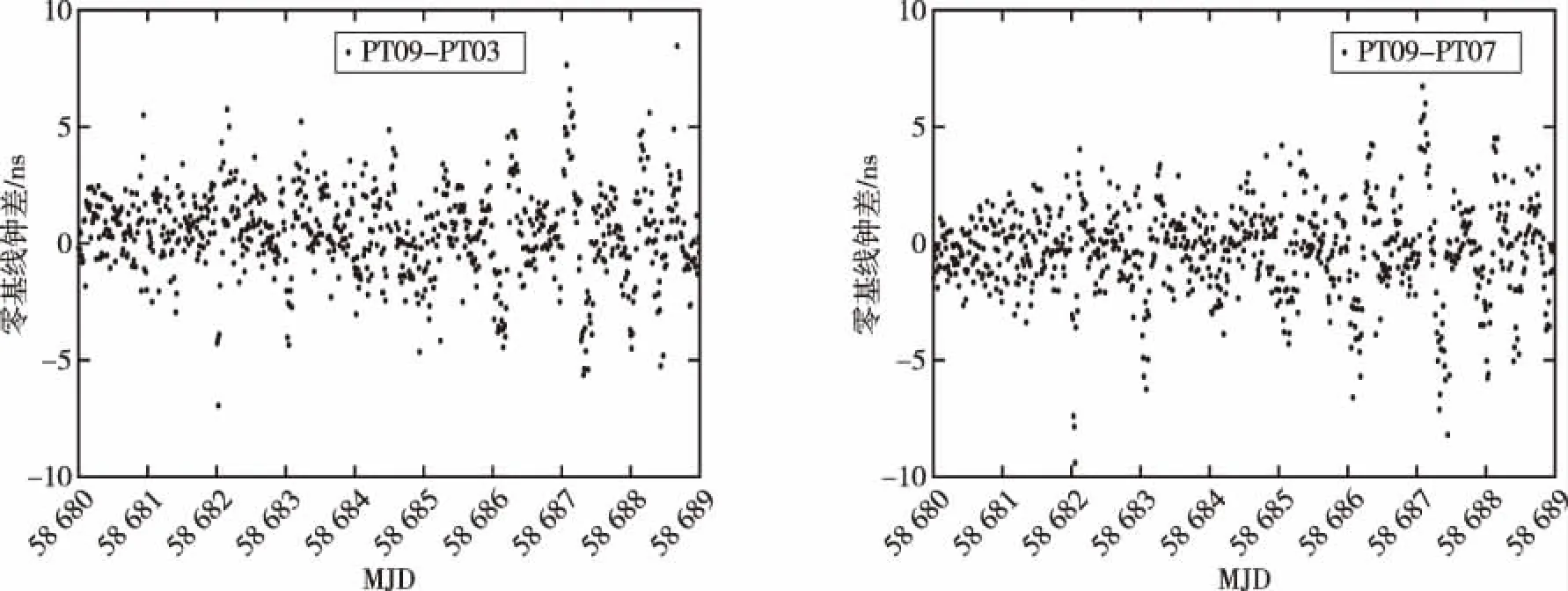
圖6 PT09-PT03零基線鐘差示意圖 圖7 PT09-PT07零基線鐘差示意圖Fig.6 Zero baseline clock difference of PT09-PT03 Fig.7 Zero baseline clock difference of PT09-PT07
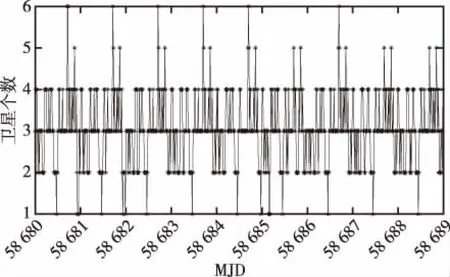
圖8 NTSC和PTB同時觀測到的衛星個數示意圖Fig.8 The number of satellites that can be observed simultaneously
由圖8可知,NTSC和PTB在同一時刻同時觀測到的衛星個數為1~6顆。
從圖9至圖12可以看出多接收機鏈路的穩定度優于單接收機鏈路。單接收機鏈路與多接收機鏈路共視結果的比較如圖13所示。
由圖13可見多接收機鏈路結果與兩條單接收機鏈路結果的趨勢基本保持一致,但它的波動較小,表現在圖中為多接收機鏈路的結果(紅線)處于兩條單接收機鏈路(黑線和藍線)之間。表2給出了所有鏈路共視比對結果的STDEV值(增益因子為多接收機鏈路比對結果相比較于各條單接收機鏈路比對結果增加的百分比)。
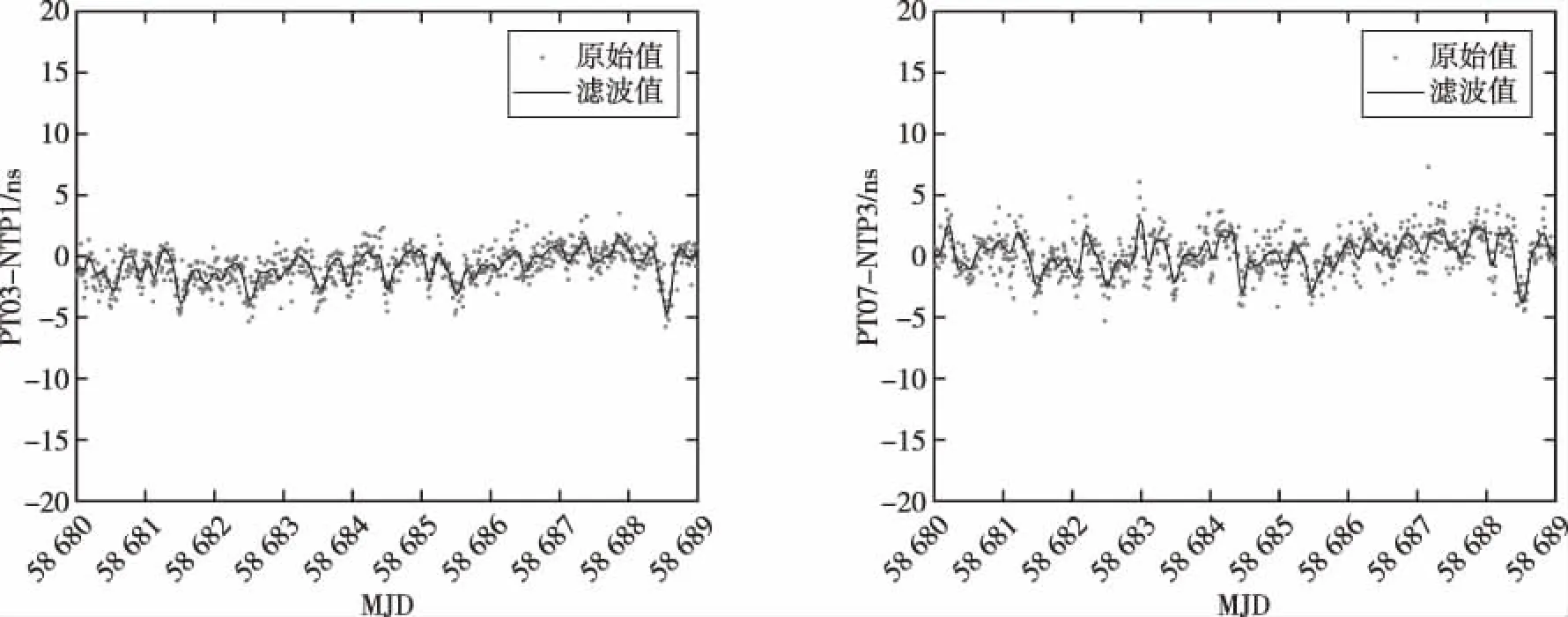
圖9 單接收機鏈路PT03-NTP1的偏差示意圖 圖10 單接收機鏈路PT07-NTP3的偏差示意圖Fig.9 Deviation of a single receiver link(PT03-NTP1) Fig.10 Deviation of a single receiver link(PT07-NTP3)
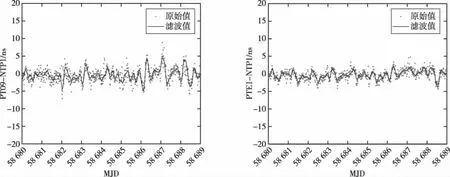
圖11 單接收機鏈路PT09-NTP1的偏差示意圖 圖12 多接收機鏈路PTE1-NTE1的偏差示意圖Fig.11 Deviation of a single receiver link(PT09-NTP1) Fig.12 Deviation of a single receiver link(PTE1-NTE1)
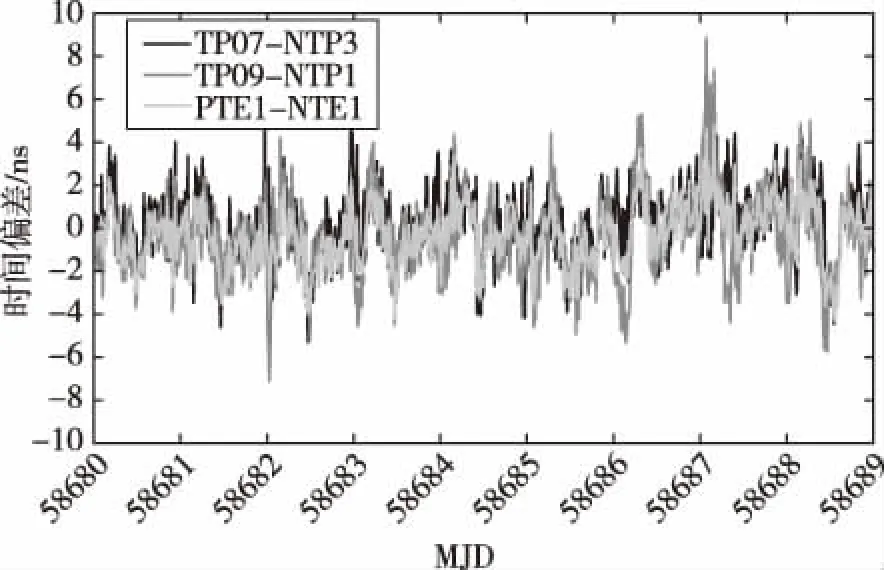
圖13 多接收機鏈路與兩個單接收機鏈路的偏差比較示意圖Fig.13 Comparison of the deviation of a multi-receiver link to two single-receiver links
由表2可知多接收機鏈路PTE1-NTE1的STDEV值為1.36ns,優于各個單接收機鏈路。圖14和圖15為多接收機鏈路和單接收機鏈路的阿倫方差和時間方差,不同平均時間的阿倫方差,見表3。
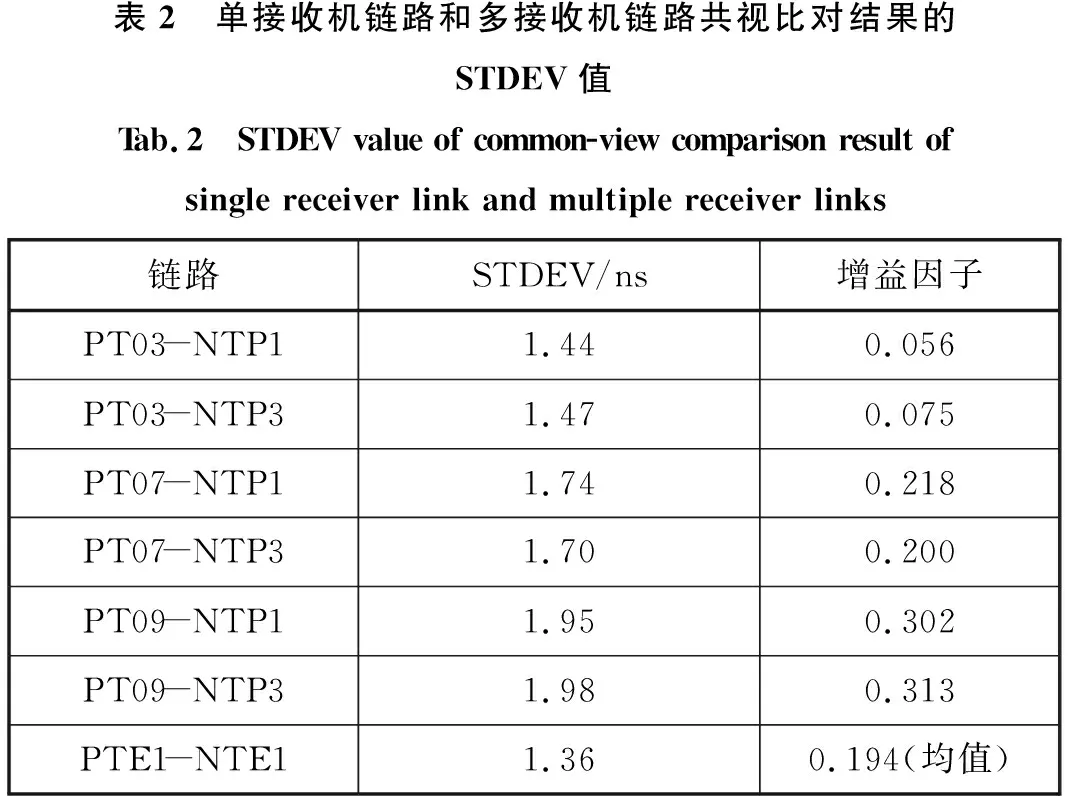
表2 單接收機鏈路和多接收機鏈路共視比對結果的STDEV值Tab.2 STDEV value of common-view comparison result ofsingle receiver link and multiple receiver links 鏈路STDEV/ns增益因子PT03-NTP11.440.056PT03-NTP31.470.075PT07-NTP11.740.218PT07-NTP31.700.200PT09-NTP11.950.302PT09-NTP31.980.313PTE1-NTE11.360.194(均值)
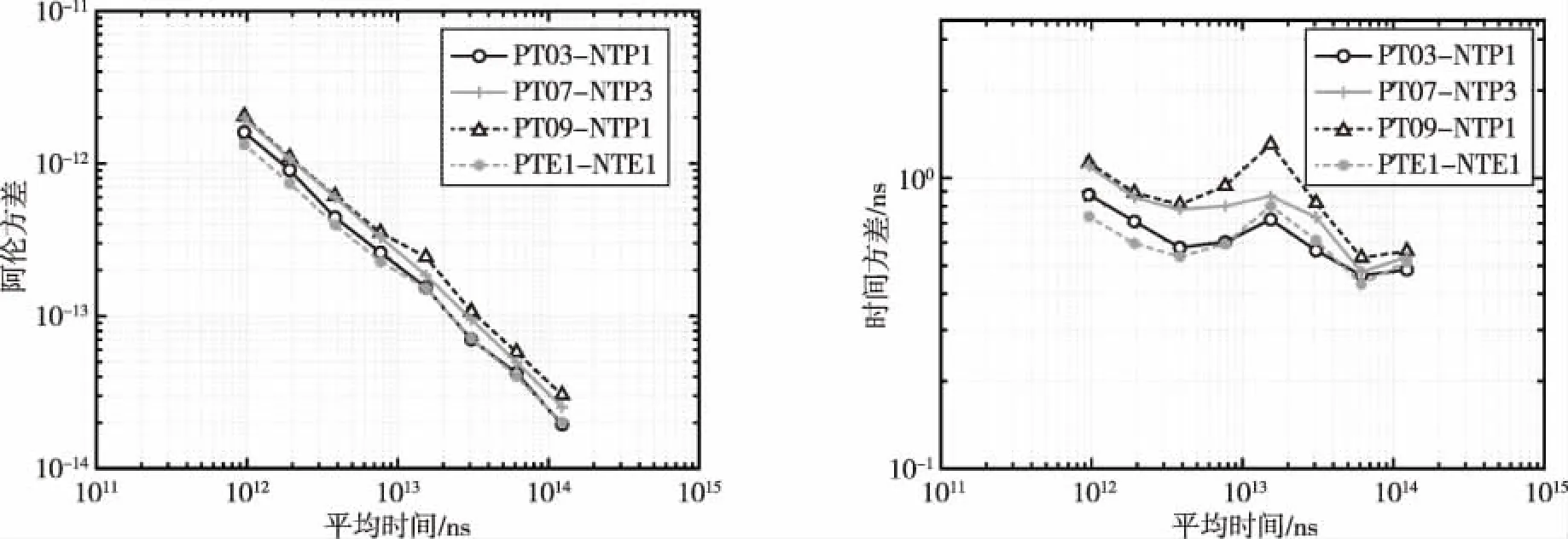
圖14 GPS共視的阿倫方差曲線圖 圖15 GPS共視的時間方差曲線圖 Fig.14 Allan variance of GPS common view Fig.15 Time variance of GPS common view
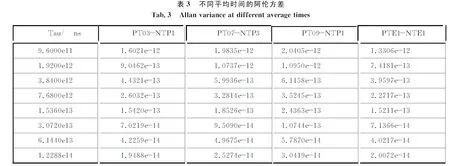
由圖14可知,4條鏈路PTE1-NTE1、PT07-NTP3、PT03-NTP1和PT09-NTP1的頻率穩定度分別為3.20×10-14(1d),3.98×10-14(1d),3.31×10-14(1d)和4.40×10-14(1d),天穩都達到了10-14量級,由圖15可得,4條鏈路的時間穩定度均在1ns量級,結合圖14和圖15可得,多接收機鏈路的頻率和時間穩定度優于各個單接收機鏈路。由于單接收機鏈路受到各種因素影響,數據噪聲較大,采用接收機組合技術后,觀測數據的總延遲平均化,噪聲得到一定的抑制,因此,在兩端參考源不變的情況下,多接收機鏈路PTE1-NTE1提高了共視時間比對的性能。
6 結束語
利用NTSC和PTB兩個守時實驗室各自的多臺接收機,介紹了多接收機組合的技術原理,組成多接收機系統,采用數據融合計算得出多接收機系統的觀測數據,在NTSC和PTB開展了GPS共視時間比對試驗。結果表明,多接收機組合鏈路的共視比對結果的STDEV值為1.36ns,比單接收機鏈路比對結果的STDEV值平均提高了19.4%,天穩為3.20×10-14量級,頻率和時間穩定度均優于單接收機鏈路,由此可知,多接收機組合可以有效提升GPS共視時間比對的各項性能指標。
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代貴州(2019年41期)2019-12-13 09:28:56
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國共青團(2015年7期)2015-12-17 01:24:38