基于超聲波雷達(dá)的泊車位類型檢測
2020-05-03 13:54:12付鵬李嫩陳庚周琳
汽車實(shí)用技術(shù) 2020年7期
付鵬 李嫩 陳庚 周琳

摘 要:環(huán)境感知系統(tǒng)作為自動(dòng)泊車系統(tǒng)的基礎(chǔ),其系統(tǒng)魯棒性和精確性對于泊車成功率有著決定性的作用。目前車位檢測方法主要分為測距技術(shù)和視覺技術(shù)兩種。文章通過探討超聲波雷達(dá)的測距變化特點(diǎn),對車位檢測方法進(jìn)行研究,確定不同類型泊車位情況下的車位約束條件,分辨待泊入泊車位的具體類型,為自動(dòng)泊車做理論基礎(chǔ)準(zhǔn)備。
關(guān)鍵詞:自動(dòng)泊車;超聲波雷達(dá);約束條件;車位類型
Abstract: As the basis of the automatic parking system, the environmental perception system has a decisive effect on the parking success rate due to its robustness and accuracy. At present, parking space detection methods are mainly divided into two types: ranging technology and vision technology. This article explores the characteristics of ranging changes of ultrasonic radar, studies the parking space detection methods, determines the parking space constraints in different types of parking spaces, distinguishes the specific types of parking spaces to be parked in preparation for automatic parking. The detection principle is analyzed, and the limitations of parking space detection based on visual sensors are compared. The advantages of ultrasonic radar in parking space type detection are explained.
前言
自動(dòng)泊車輔助系統(tǒng)(Automatic Parking Assistant,APA)作為汽車新四化中的智能化發(fā)展方向之一,其完善的功能儲備有助于減少駕駛技術(shù)不熟練的駕駛員在泊車時(shí)發(fā)生交通事故的概率,方便了用戶的生活。而隨著城市化進(jìn)程的加快,泊車環(huán)境也越來越惡劣,增加了泊車難度,自動(dòng)泊車輔助系統(tǒng)的發(fā)展越來越重要。車位檢測技術(shù)作為自動(dòng)泊車系統(tǒng)的基礎(chǔ)部分,檢測效果對于泊車的成功與否有著至關(guān)重要的影響。隨著科學(xué)技術(shù)的發(fā)展,傳感器獲取環(huán)境信息的方式呈現(xiàn)出多樣性,車位檢測方法也不盡相同。目前車位檢測技術(shù)主要有基于視覺傳感器的車位檢測和基于測距技術(shù)的車位檢測,由于視覺傳感器需要識別泊車位標(biāo)記的車位標(biāo)記線,且識別精度易受光線影響檢測成本較高,本文采用基于測距技術(shù)的車位檢測。國內(nèi)外學(xué)者對基于測距技術(shù)的超聲波車位檢測進(jìn)行了研究,如:Wan-Joo Park等人使用超聲波傳感器進(jìn)行車位檢測,Degerman使用大量程超聲波傳感器,采用霍夫變換進(jìn)行車位空間大小計(jì)算,何偉通過對傳感器特性的研究與實(shí)際多次策略誤差分析,得出補(bǔ)償公式,精度控制在5%以內(nèi)。目前,已有部分公司配置了此項(xiàng)功能如吉利、長安、大眾、豐田等,一些激進(jìn)的廠商選擇采用視覺傳感器做車位識別,但仍然有部分公司會(huì)選擇超聲波傳感器作為車位識別基礎(chǔ)。車位識別作為自動(dòng)泊車中的基礎(chǔ)部分,本文作者對平行、垂直、斜方位泊車的約束條件進(jìn)行研究,從檢測原理上進(jìn)行分析,為泊車位檢測做基礎(chǔ)。
1 自動(dòng)泊車輔助系統(tǒng)
1.1 自動(dòng)泊車輔助系統(tǒng)工作流程
自動(dòng)泊車輔助系統(tǒng)開啟后,車輛通過傳感器感知車輛周圍環(huán)境,識別泊車空間及障礙物,車輛識別到相應(yīng)類型的泊車位后,再比較車位空間大小。如果泊車空間小于最小泊車空間,則反饋給駕駛員當(dāng)前泊車空間不符合要求,泊車功能不能激活,繼續(xù)搜尋其他泊車位。如果識別到滿足要求的泊車位,確定即將泊車的起始位置,是否滿足泊車起始位置要求,如果不滿足,則調(diào)整車輛起始位置,當(dāng)起始位置在可規(guī)劃路徑的起始區(qū)域位中,則根據(jù)環(huán)境信息和車輛參數(shù)信息進(jìn)行泊車路徑軌跡規(guī)劃。若規(guī)劃成功,則提示駕駛員泊車系統(tǒng)可以激活;若不成功,則放棄此泊車位,繼續(xù)尋找合適泊車位。路徑規(guī)劃成功后,駕駛員激活泊車系統(tǒng),系統(tǒng)根據(jù)傳感器采集的信息控制車輛方向盤和車速進(jìn)行泊車。為保證泊車過程能夠安全進(jìn)行,將駕駛員的操作做為優(yōu)先級別,泊車時(shí)駕駛員可以隨時(shí)介入并控制車輛,防止由于傳感器未識別或者錯(cuò)誤識別障礙物而使得車輛發(fā)生碰撞,其流程圖如圖1所示。
2 泊車位識別
2.1 超聲波測距識別理論基礎(chǔ)
雷達(dá)技術(shù)來自仿生學(xué)中的蝙蝠,并廣泛應(yīng)用于航空航天、軍事武器和智能車輛中。超聲波根據(jù)其工作特點(diǎn),具有抗干擾力強(qiáng),良好的反射性能,指向性強(qiáng)且易于接收的優(yōu)勢,在自適應(yīng)巡航、泊車輔助系統(tǒng)、緊急避撞等智能汽車駕駛輔助系統(tǒng)中均有運(yùn)用。
超聲波傳感器由超聲波發(fā)送器、控制單元、超聲波接收器、電源。超聲波測距原理如圖2超聲波發(fā)送器將電振動(dòng)能量轉(zhuǎn)化為機(jī)械超聲波發(fā)送到空中,聲波經(jīng)障礙物反射后,由聲波接收器將反射回來的波形轉(zhuǎn)化為電能,根據(jù)發(fā)送和接收聲波的時(shí)間差可以由公式(1)和(2)計(jì)算得到。
2.2 車位檢測原理
根據(jù)車位標(biāo)識線的不同可以將泊車車位分為平行車位、垂直車位和斜車位三類。泊車位類型不同,車位檢測原理也相應(yīng)的有所差異,而在同一類泊車位當(dāng)中根據(jù)泊車位兩側(cè)的有無障礙,車位檢測所用到的傳感器也不相同。由于超聲波傳感器智能識別有障礙物時(shí)才能發(fā)揮作用,因此本文只對于有障礙物的泊車位進(jìn)行討論,分析不同類型泊車位的檢測原理。
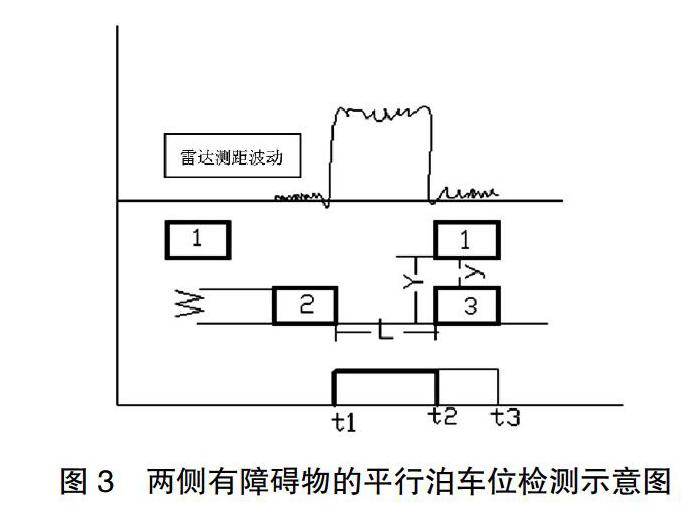
圖3為左右均有障礙物情況下的平行泊車位示意圖。自動(dòng)泊車輔助相同開啟后,車輛1緩慢向前行駛,在車輛1行駛過程中,超聲波傳感器不停的檢測車輛與障礙物車輛2之間的距離y1,當(dāng)車輛1駛離2后,傳感器測得的距離會(huì)發(fā)生突變,記錄此時(shí)的時(shí)間為T1,距離為Y2。車輛1繼續(xù)向前行駛,Y2的值會(huì)在小范圍內(nèi)發(fā)生變化,直到在T2時(shí)刻探測到車輛2,傳感器測得的距離y3會(huì)跳變,隨后保持在y3小范圍內(nèi)跳動(dòng)直到車輛1與3后視鏡平行時(shí)停車,此時(shí)記為T3。通過對T1和T2時(shí)刻在速度上的積分可大致測得泊車位長度L,對T1和T2及T2和T3時(shí)刻測得的數(shù)據(jù)取平均值得到Y(jié),y,可得到泊車位寬度W=Y-y。
在收集到相應(yīng)的信息后,需要根據(jù)測得的參數(shù)判定泊車位類型。一般W約束為2.5m,為了保證泊車成功率此處給定2.8m,當(dāng)滿足約束條件時(shí),可判定為平行泊車位,給定約束條件:L≥Lmin,W≧2.8m。
垂直泊車位的檢測理論和平行泊車位大體相同,都是通過檢測到傳感器發(fā)生跳變的時(shí)間點(diǎn)進(jìn)行分析,通過采取到的車位W和L與約束條件進(jìn)行對比,滿足約束條件則為垂直泊車位。垂直泊車位的約束條件與平行泊車位不同,其W受國家規(guī)定的一般泊車位需大于6m影響,需重新給定約束條件:L≥2.8m,W≧6m。
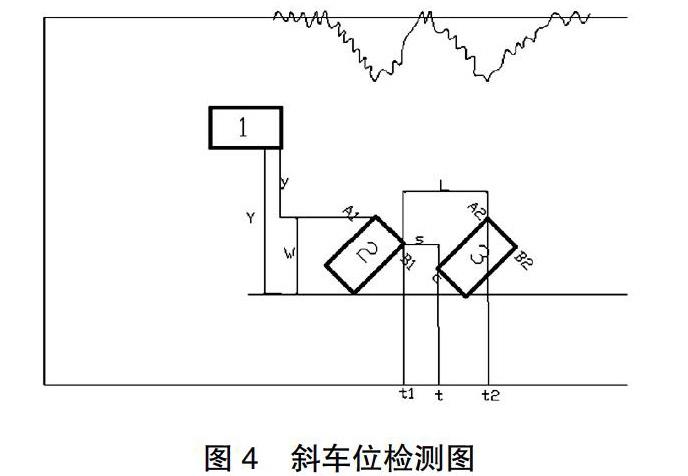
圖4給出了斜車位檢測示意圖。通過超聲波檢測斜車位,在原理上區(qū)別于平行和垂直泊車位,障礙物停泊角度呈30?、45?、60?,車輛在檢測泊車位時(shí)所得到的泊車位尺寸并非實(shí)際值,且僅僅通過簡單的L和W值已不能形成比較有效的約束,此處引入測得泊車位的斜率k來進(jìn)一步做判斷所測泊車位類型的依據(jù)。
泊車輔助系統(tǒng)開啟后,車輛1沿直線向前行駛,此時(shí)未檢測到障礙物,超聲波會(huì)在小范圍內(nèi)跳動(dòng),記錄測得的距離為Y,在超聲波傳感器剛剛檢測到車輛2時(shí),傳感器接收到的信號會(huì)有微量變化,隨著車輛1繼續(xù)向前行駛,測得的與障礙物之間的距離逐漸變小,直到傳感器檢測到車輛2的A1點(diǎn)時(shí)距離達(dá)到最小值,記錄為y,隨后測得距離逐漸變大,經(jīng)過B1點(diǎn)后發(fā)生跳變,記錄此時(shí)時(shí)間為t1,跳變后測距會(huì)在
小范圍內(nèi)發(fā)生變化,此時(shí)測距為W=Y-y,車輛1傳感器檢測車位c點(diǎn)時(shí)記錄時(shí)間為t,經(jīng)過c點(diǎn)后測得距離逐漸變小,到A2點(diǎn)時(shí)距離達(dá)到最小值,記錄此時(shí)時(shí)間為t2,在t1和t2時(shí)間內(nèi)對車輛1的速度進(jìn)行積分可得到泊車位的L,對車輛1的速度在t1和t上進(jìn)行積分可得距離s,記X=L-s,則斜率k=W/ X。
泊車輔助系統(tǒng)開啟后,車輛開始搜索泊車位,收集傳感器得到的泊車位信息并發(fā)送給處理器,當(dāng)處理器判斷所得信息滿足約束條件:tan25?≤k≤tan65?,L≥2.8m,W≥6m。
3 結(jié)論
測距傳感器具有功率大、指向性強(qiáng)、價(jià)格低廉、不易干擾的優(yōu)點(diǎn),在經(jīng)濟(jì)發(fā)展下行的情況下,配合主機(jī)廠提升產(chǎn)品功能可靠性的同時(shí)降低開發(fā)成本,幫助產(chǎn)品在競爭日益激烈的市場環(huán)境中,提升產(chǎn)品競爭力。本文在分析基于測距技術(shù)的不同類型泊車位檢測原理后,從理論上分析了超聲波雷達(dá)在泊車位檢測功能上的可行性,可以對我們?nèi)粘I钪械牟窜囄活愋瓦M(jìn)行判定,判定的約束條件僅僅需要簡單的條件就可以具體判斷出所測泊車位的類型,為泊車輔助系統(tǒng)的基礎(chǔ)感知系統(tǒng)做出了理論闡述。
參考文獻(xiàn)
[1] Wan-Joo Park, Byung-Sung Kim, Dong-Eun Seo,et al. Parking space detection using ultrasonic sensor in parking assistance system[C]// Intelligent Vehicles Symposium, 2008 IEEE. IEEE, 2008.
[2] 郭孔輝,李紅,宋曉琳,et al.自動(dòng)泊車系統(tǒng)路徑跟蹤控制策略研究[J].中國公路學(xué)報(bào)(9):110-118.
[3] 李紅.自動(dòng)泊車系統(tǒng)路徑規(guī)劃與跟蹤控制研究[D].湖南大學(xué), 2014.
[4] 段現(xiàn)星.超聲波傳感器在倒車?yán)走_(dá)上的發(fā)展[J].家電檢修技術(shù)(6期):1-1.
