基于PID算法的磁選態銫束管C場的優化
2020-05-04 08:07:50
中國空間科學技術 2020年2期
蘭州空間技術物理研究所 真空技術與物理重點實驗室,蘭州 730000
銫原子鐘作為一級頻率標準,具有高準確度與高穩定度等優點,應用廣泛[1]。銫原子鐘包括銫束管和頻標電路,其中銫束管作為物理部分,用于產生原子能級躍遷,輸出鑒頻信號。銫束管輸出信號的信噪比、優值等指標直接影響了整鐘的穩定度指標,C場電流與整鐘的準確度指標也有一定的關系,不同的C場電流對應的頻率準確度也不同[2-5]。為了獲得較好的信號指標,使銫束管處于最佳工作狀態,需要對C場、聚焦極、離化絲等銫束管工作參數優化。同時,銫束管參數優化過程中能夠發現銫束管生產過程中的問題,對銫束管生產進行針對性的改進,進而持續提高銫束管的性能指標和成品率。因此,在銫束管生產過程中需要對銫束管進行參數優化以獲得最優的躍遷信號。
王超等人研制的銫束管測試平臺[6-8]能夠對銫束管Ramsey花樣進行掃描,并對躍遷信號的線寬、信噪比等性能參數進行測試,經過多年的使用已驗證了其測試的準確性與正確性。但是使用該平臺進行銫束管C場的優化時,需要手動調節銫束管外加C場電流的大小找出最優,操作較為繁瑣,優化精度達不到要求。為了滿足銫束管批量生產的需要,同時保證銫束管對C場電流優化的精度,保證銫鐘的準確度指標,需要采用合適的優化算法對C場電流進行優化。課題組采用PID算法對銫束管的C場電流進行優化,縮短了銫束管優化的時間,提高了優化的精度,保證了銫鐘準確度等指標的實現。
1 理論分析
1.1 C場分析
在磁選態銫束管中,輻射場相互作用區和漂移區通常加有約為6×10-6T的恒定均勻磁場,稱之為C場。文獻[9]中給出國內小型銫原子鐘的C場平均值為6.115 3×10-6T。C場的主要作用在于:1)使銫原子躍遷的mF=0態從其他超精細能級中分離出來;2)使A磁場中形成的原子磁能態經過零磁場不會發生混疊;3)提供空間選出σ躍遷。銫原子躍遷的頻率ν計算公式可以表示為[10]:
ν=ν0+7.008 3×109mFH0+
(1)
式中:ν0=9 192 631 770 Hz,為零場躍遷頻率值;H0為銫束管內C場的磁感應強度;mF為磁量子數。對于(0~0)峰躍遷頻率,mF=0,式(1)可以寫成:
(2)
對于(-1~-1)峰躍遷頻率,mF=-1,式(1)可以寫成:
ν=ν0-7.008 3×109H0+26.715×
(3)
由式(2)與式(3)可知,當C場磁感應強度值H0發生變化,銫原子的躍遷頻率也發生變化,會產生輸出頻率的誤差。銫原子躍遷頻率與銫束管內C場大小呈一一對應的關系。將H0=6.115 3×10-6T帶入式(2)與式(3),可以計算出(0~0)峰頻率與(-1~-1)峰頻率差值(即塞曼頻率)約為42.820 kHz。
銫原子鐘的準確度與C場頻移有關,具體關系式如下[10]:
式中:δν/ν0表示銫鐘準確度;δH/H0表示磁感應強度相對測量誤差。為保證5×10-13的頻率準確度,理論上要求δν/ν0<1×10-13,取H0=6.115 3×10-6T,則應該保證δH/H0<2.99×10-4。也就是說,銫束管中的C場磁感應強度H0允許變化范圍為H0-δH~H0+δH,才能保證銫鐘準確度。將H0-δH與H0+δH分別代入式(2)與式(3)中,可以計算得到允許的中央(0~0)峰與(-1~-1)峰的頻率差的允許變化范圍為±20 Hz。
由于銫束管是一個密閉的真空器件,H0不易直接測量。而銫束管輸出信號的Ramsey花樣可以直觀地在測試平臺上顯示出來,并且可以通過測試平臺標定出Ramsey信號上(0~0)峰與(-1~-1)峰的頻差,銫束管的(0~0)峰與(-1~-1)峰的頻差與C場強度一一對應。所以工程上通常使用間接手段對其C場進行優化,具體步驟是通過掃描銫束管三峰的花樣并計算出(0~0)峰與(-1~-1)峰的頻率差,根據差值手動調節外加C場電流的大小,從而改變C場磁感應強度,使得掃描計算的頻率差的實際值與理想值(42.82 kHz)之間的誤差保持在±20 Hz范圍之內,這時可以認為該外加銫束管的C場電流為銫束管工作的最優電流值。圖1為銫束管測試系統掃描的Ramsey三峰。
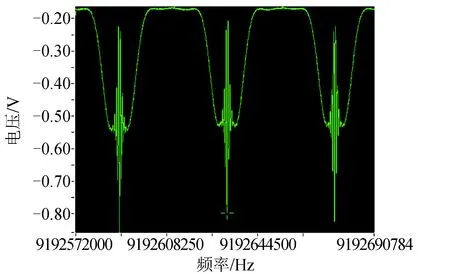
圖1 銫束管測試系統掃描的Ramsey三峰Fig.1 Three peaks scanning of Ramsey flange of cesium beam tube test system
1.2 磁選態銫束管測試系統介紹
基于LabWindows/CVI的磁選態銫束管性能測試系統由頻標電路、數據采集卡和上位機組成[11-12]。頻標電路為銫束管提供銫原子躍遷所需要的9.192 6 GHz的微波信號,同時為銫束管提供工作需要的倍增器電壓、離化絲電壓、聚焦極電壓和C場電流等,數據采集卡將銫束管輸出信號采集后送至上位機,上位機用于收集銫束管輸出信號Ramsey線形并計算得出包括線寬、峰谷比、信噪比等性能參數。圖2為測試系統掃描的Ramsey花樣。
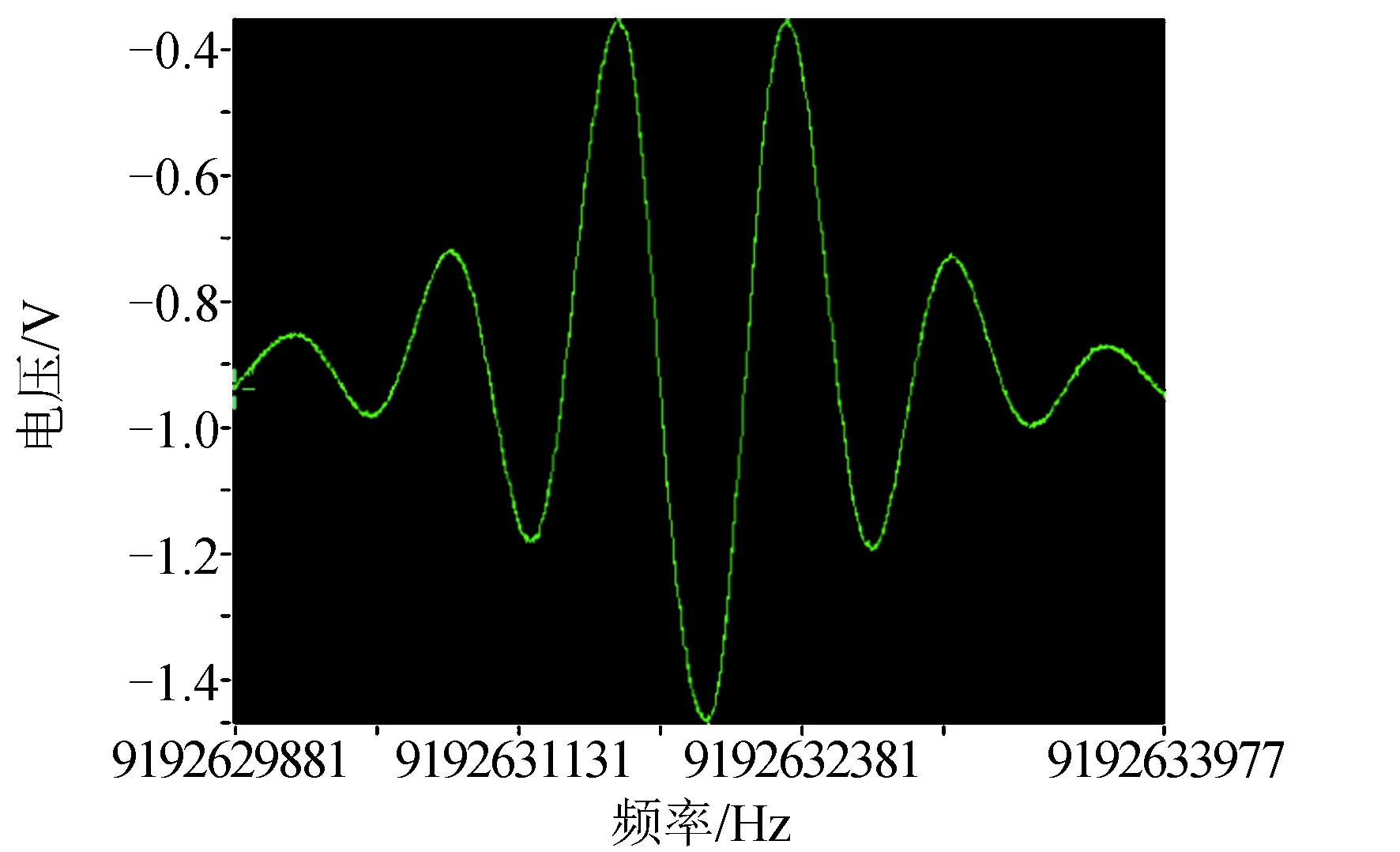
圖2 銫束管測試系統掃描的Ramsey花樣Fig.2 Ramsey flange scaning of cesium beam tube test system
上位機程序的另一個功能是實現銫束管性能參數的供電參數優化功能。通過串口的連接將上位機與頻標電路連接起來,由上位機將預先設置好的指令發送至頻標電路的DSP產生中斷,控制頻標電路為銫束管提供供電參數以及掃頻等功能[13]。圖3為測試系統的軟件功能框圖。
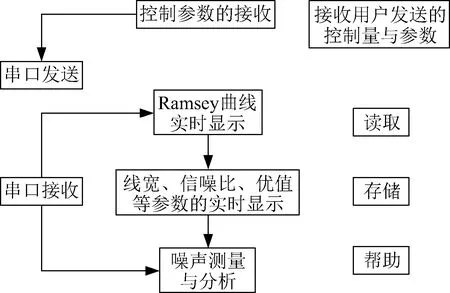
圖3 軟件功能框圖Fig.3 Software functional block diagram
1.3 PID控制算法設計與分析
PID控制算法是工程控制中應用極其廣泛的一種算法,因為其可靠性高、算法簡單、對誤差具有魯棒性等特點,主要用于工程實踐中的穩態控制,使所需控制對象保持在設定的穩定狀態[14-16]。
(1)基本PID算法
基于PID算法的PID系統由控制器和被控對象組成。具體原理框圖如圖4所示。
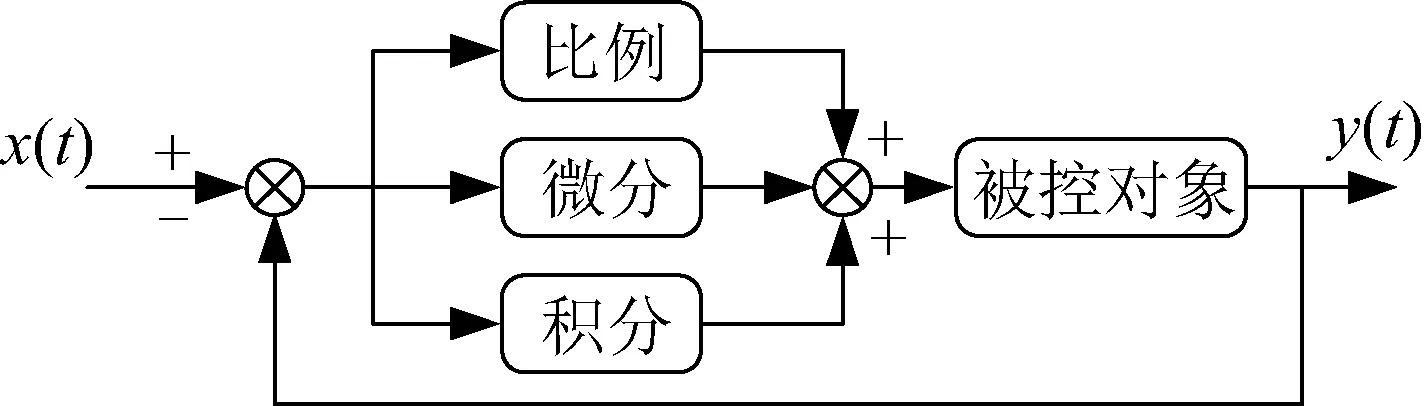
圖4 模擬PID控制系統原理Fig.4 Schematic diagram of analog PID control system
x(t)為設定值,y(t)為被控對象實際的輸出值。控制偏差的定義為:
E(t)=x(t)-y(t)
PID控制器對偏差信號進行控制,使其趨于零,最終達到穩態。常規的PID控制基本規律如下:
(4)
式中:kp為比例環節的系數;ki為積分環節的系數;kd為微分環節的系數。
由于計算機處理的是離散信號,所以在應用PID算法的時候需要對式(4)進行變換得到離散的PID算法表達式:
kd[E(k)-E(k-1)]
(5)
圖5為基本PID控制算法流程。在本文的PID優化中,由于系統的需求,控制信號實際上應為C場電流值的大小,偏差值E(k)為預設的頻差fs與實際頻差fr之間的頻率差值Δf(k)。但是為了方便調節,將被控量設置為C場電流的變化值,也就是說,由PID算法根據第k次的公式計算出在第k次設置的C場電流值與C場電流變化量ΔCfd,并將第k+1次的C場電流設置到系統中,實現對銫束管C場電流的參數設置,通過掃描Ramsey花樣三峰計算出第k+1次的頻差值,根據頻差計算出E(k+1),以此類推,控制偏差量趨于0,達到優化的效果。偏差值設置為:
(6)
將式(6)帶入式(5),可以得到C場優化的PID算法表達式:
(7)
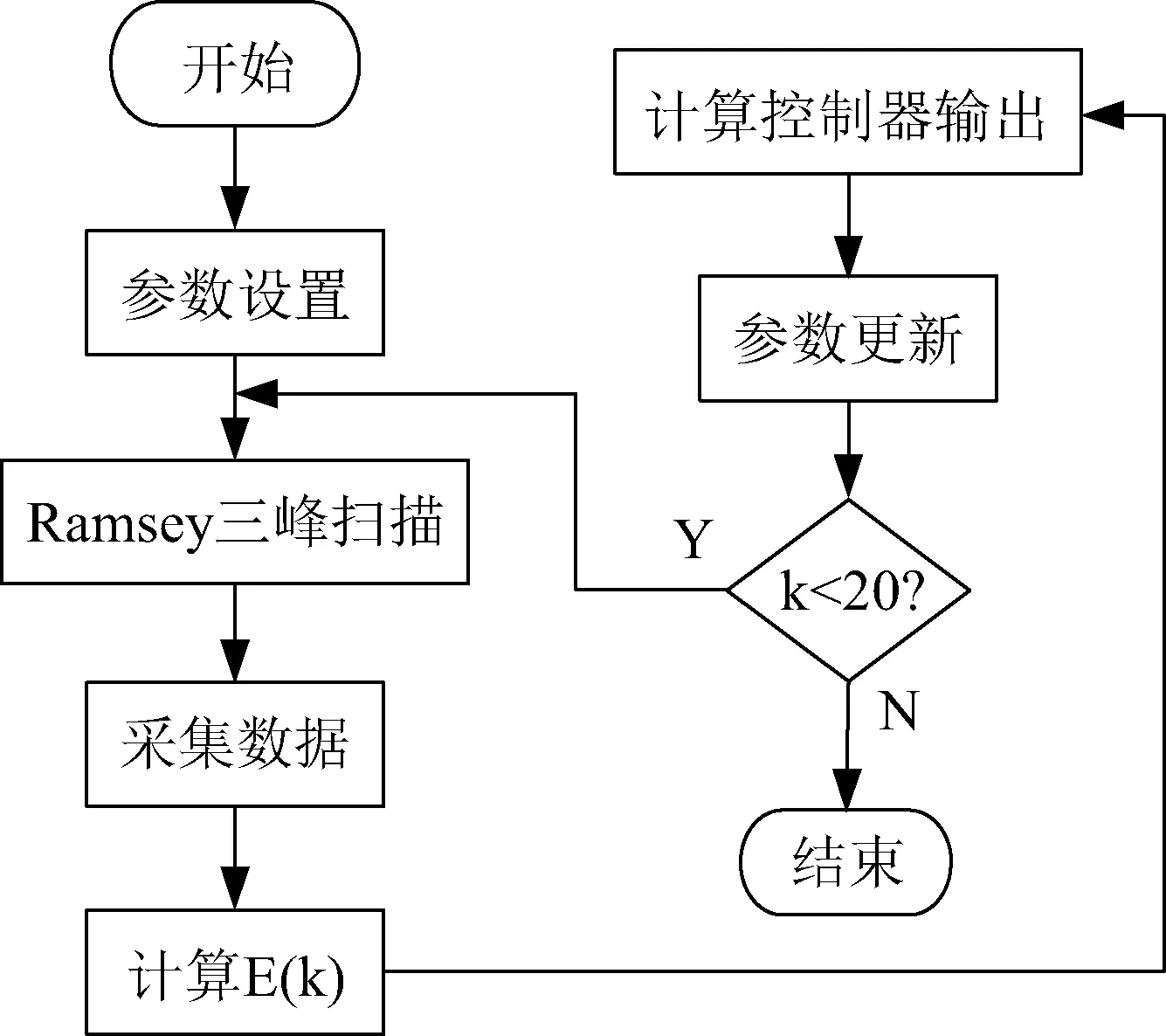
圖5 基本PID控制算法流程Fig.5 Flow chart of normal PID control algorithm
(2)積分分離式PID控制算法
積分分離控制的主要思想是:在被控量與設定值之間的偏差E(k)較大的時候,取消積分環節的作用,防止系統超調;當被控量接近于設定值的時候,加入積分環節,提高控制精度與準確度。
圖6為積分分離式PID控制算法流程。積分分離控制算法表達式如下:
kd[E(k)-E(k-1)]
(8)
式中:β為控制系數。人為設定一個閾值ε,當|E(k)|>ε,采用PD控制,取消積分項的影響,防止超調,β=0;當|E(k)|≤ε,采用PID控制,β=1,保證系統控制的精度。
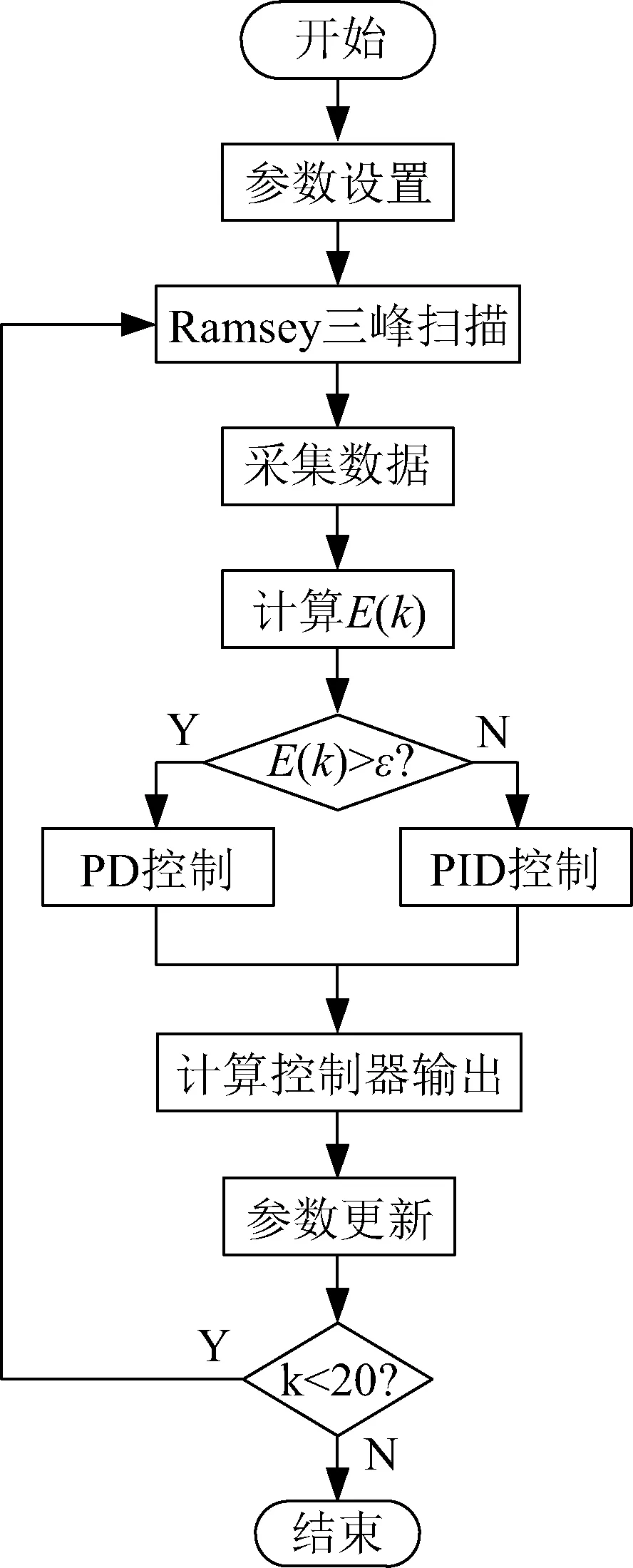
圖6 積分分離式PID控制算法流程Fig.6 Integral separation PID control algorithm flow chart
2 參數設計與結果分析
2.1 Ramsey三峰掃描誤差控制
由于銫束管測試系統采用低噪聲恒溫壓控晶振為微波模塊提供10 MHz信號用以合成銫原子躍遷的9.192 6 GHz頻率的微波信號,處于自動運行狀態,這會導致銫束管的Ramsey三峰掃描存在一定的誤差。這里采用氫鐘源穩定的10 MHz信號作為參考信號輸入到微波模塊中,將所得的Ramsey三峰掃描結果與壓控晶振作為10 MHz信號掃描的三峰花樣結果進行對比,對比結果如表1所示。
由表1可以看出,銫束管測試系統使用壓控晶振10 MHz作為頻標電路輸入的10 MHz,掃描的Ramsey三峰的(+1~+1)峰與(-1~-1)峰頻率差與使用穩定氫鐘源的理想10 MHz作為輸入所掃描的Ramsey三峰的+1峰與-1峰頻率差之間存在一定的誤差,誤差范圍大致在200 Hz左右。為了保證使用PID算法對C場電流優化的準確度與精度,減少因Ramsey三峰掃頻導致的誤差,采用氫鐘輸出的高穩定度10 MHz信號作為微波模塊的輸入,保持銫束管Ramsey花樣的(0~0)峰與±1峰頻差范圍為42.82 kHz±20 Hz,這時對應的銫束管的C場電流為銫束管工作的最優電流。
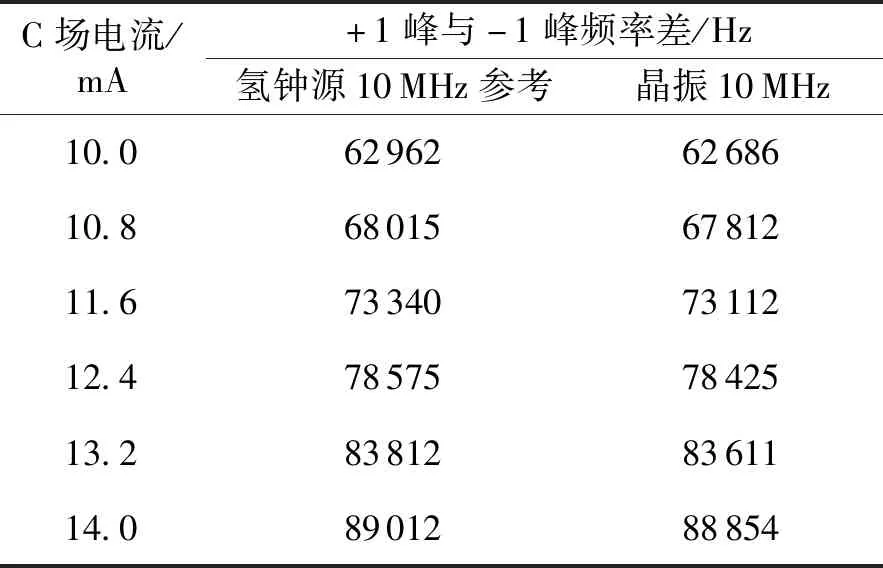
表1 掃描頻差對比Table 1 Conparision of scanning frequency differences
2.2 采用基本PID算法優化
采用控制變量法對PID算法的3個參數ki、kd與kp值進行優化分析。
(1)kp變化
控制積分系數ki=0.02,微分系數kd=3不變,對不同的比例系數kp值優化結果進行分析,優化次數為20次。優化比對見圖7。橫坐標為優化的次數,縱坐標為(0~0)峰與(-1~-1)峰的頻率差。通過PID算法的設計,觀察頻率差隨著優化次數變化的規律圖,對不同的PID參數的優化性能進行比對,從而選取合適的參數設置。
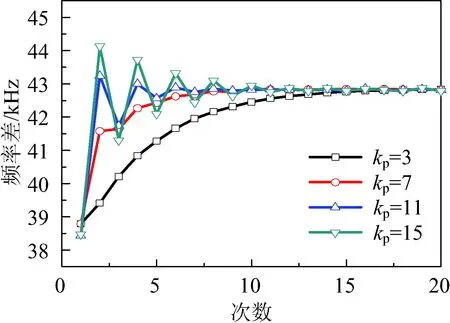
圖7 不同比例系數的優化結果Fig.7 Optimization results with different kp values
由圖7可以看出,在kp較小時(圖7中kp=3),優化速度較為緩慢。隨著kp的增加,能較快的到達所需要的結果附近,當kp=11時,產生了一定的振蕩,雖然也能較快的恢復到所需的狀態,但是需要避免從而產生影響反應的速度,kp增加,振蕩更為明顯。結合實際的需求,設定kp=7為較理想的控制值。
(2)ki變化
控制kp=7,kd=3不變,對不同的積分系數ki值優化結果進行分析,優化次數為20次。優化比對見圖8。
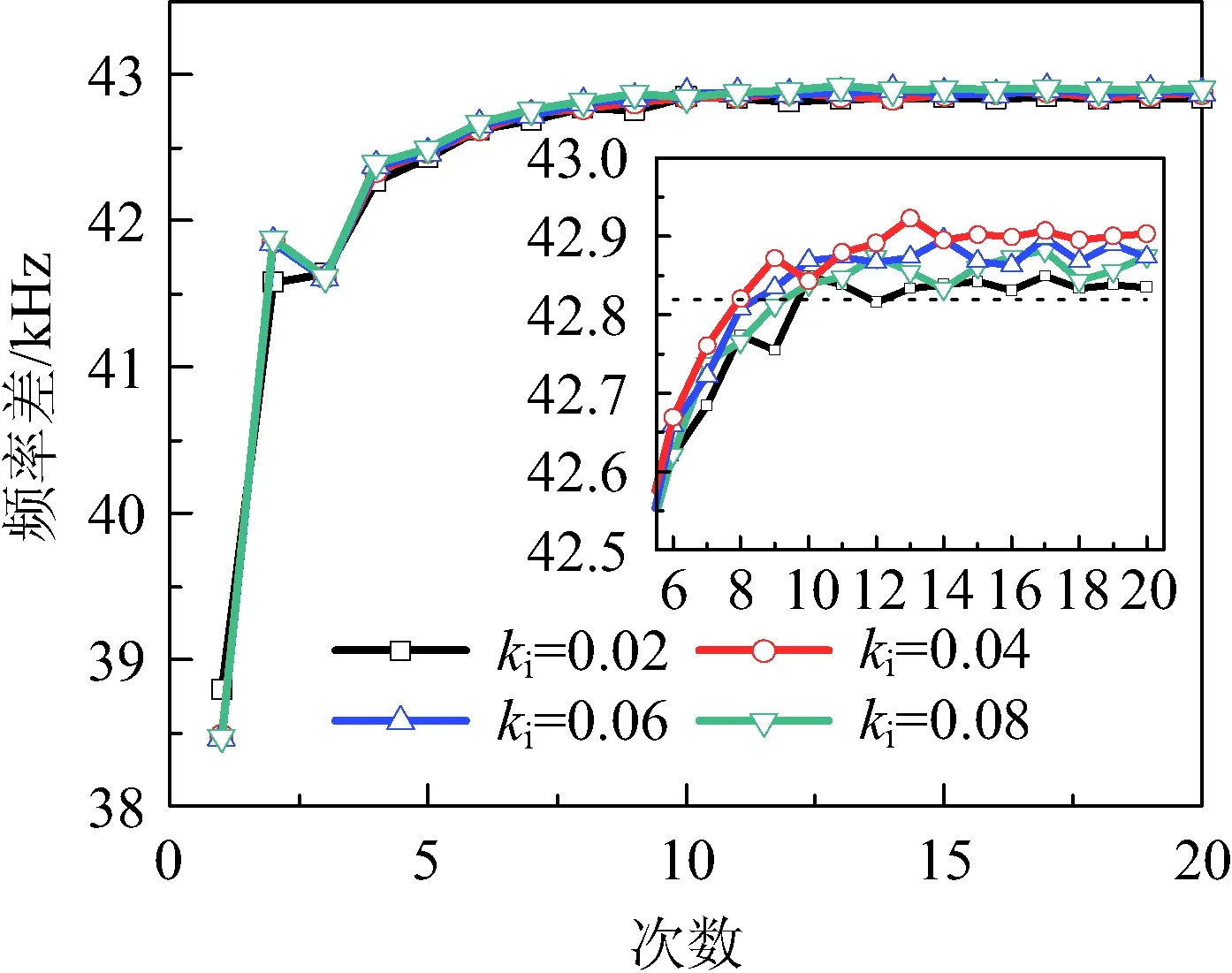
圖8 不同積分系數的優化結果Fig.8 Optimization results with different ki values
當積分系數ki發生變化時,雖然能夠很快地將優化達到預期的效果,但是從右邊小圖中觀察,隨著ki的變化,優化穩定的結果與設定值之間的誤差也隨之變化。ki越大,誤差越大,優化結果與理想結果差距越大。所以需要控制ki的值,使系統優化的結果接近設定值,這里取ki=0.02。
(3)kd變化
控制比例系數kp=7,積分系數ki=0.02不變,對不同的微分系數kd值優化結果進行分析,優化次數為20次。不同kd值的優化結果對比見圖9。
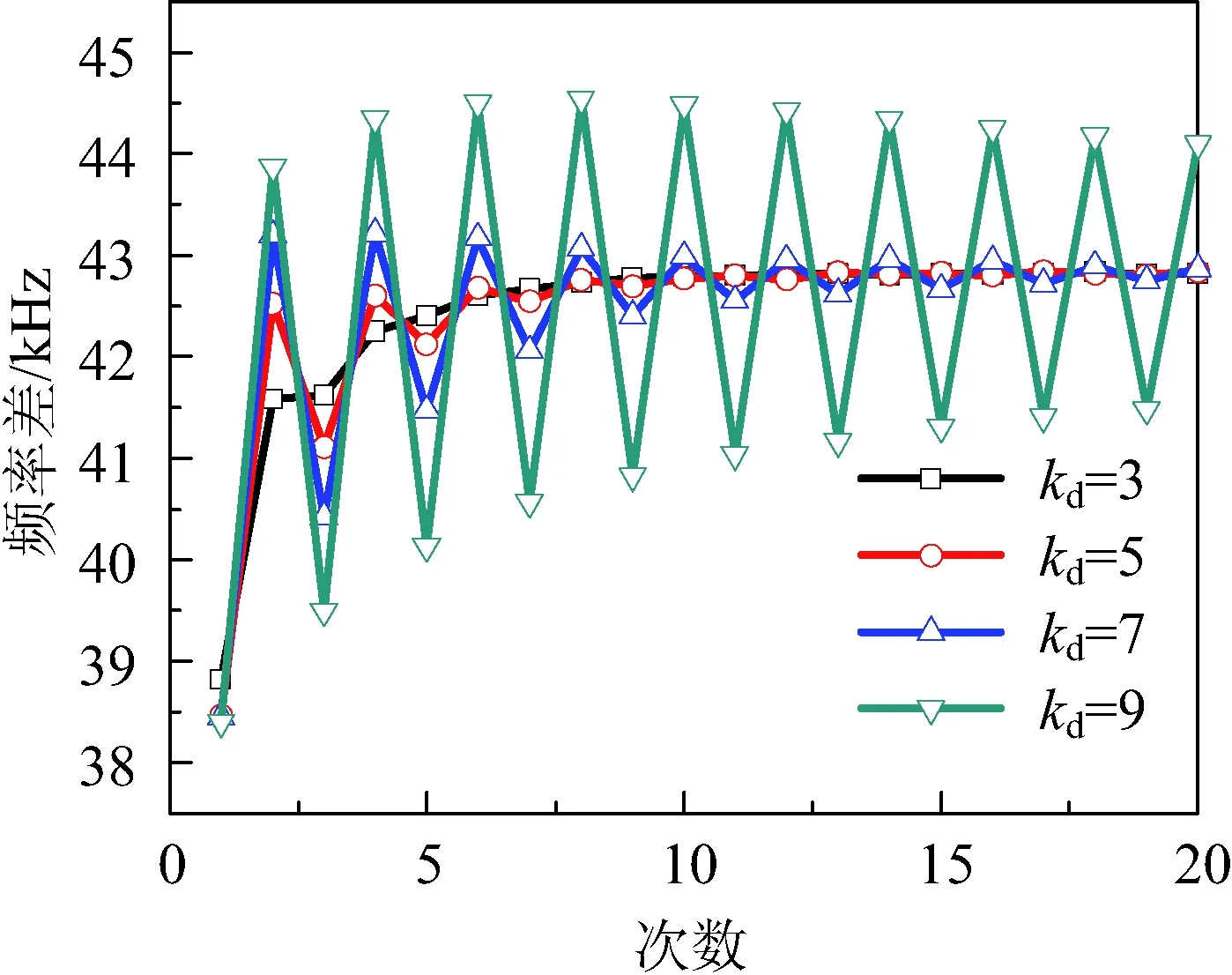
圖9 不同微分系數的優化結果Fig.9 Optimization results with different kd values
當微分系數變化的時候,優化的過程也有所變化。隨著kd的增加,優化過程中會產生較大的振蕩,這對尋找最優解是不利的,會導致無法找到最優解,所以就需要調整合適的kd減小振蕩,并使優化結果準確有效,取kd=3時,優化結果較為理想。
2.3 采用積分分離的PID算法優化
積分分離的PID算法(IS-PID)優化參數是在基礎PID算法(Normal-PID)上進行進一步分析。PID算法參數設置為kp=7、ki=0.02以及kd=3,設置閾值ε=50 Hz,當|E(k)|>ε,采用PD控制,當|E(k)|≤ε時,采用PID控制。優化結果見圖10。
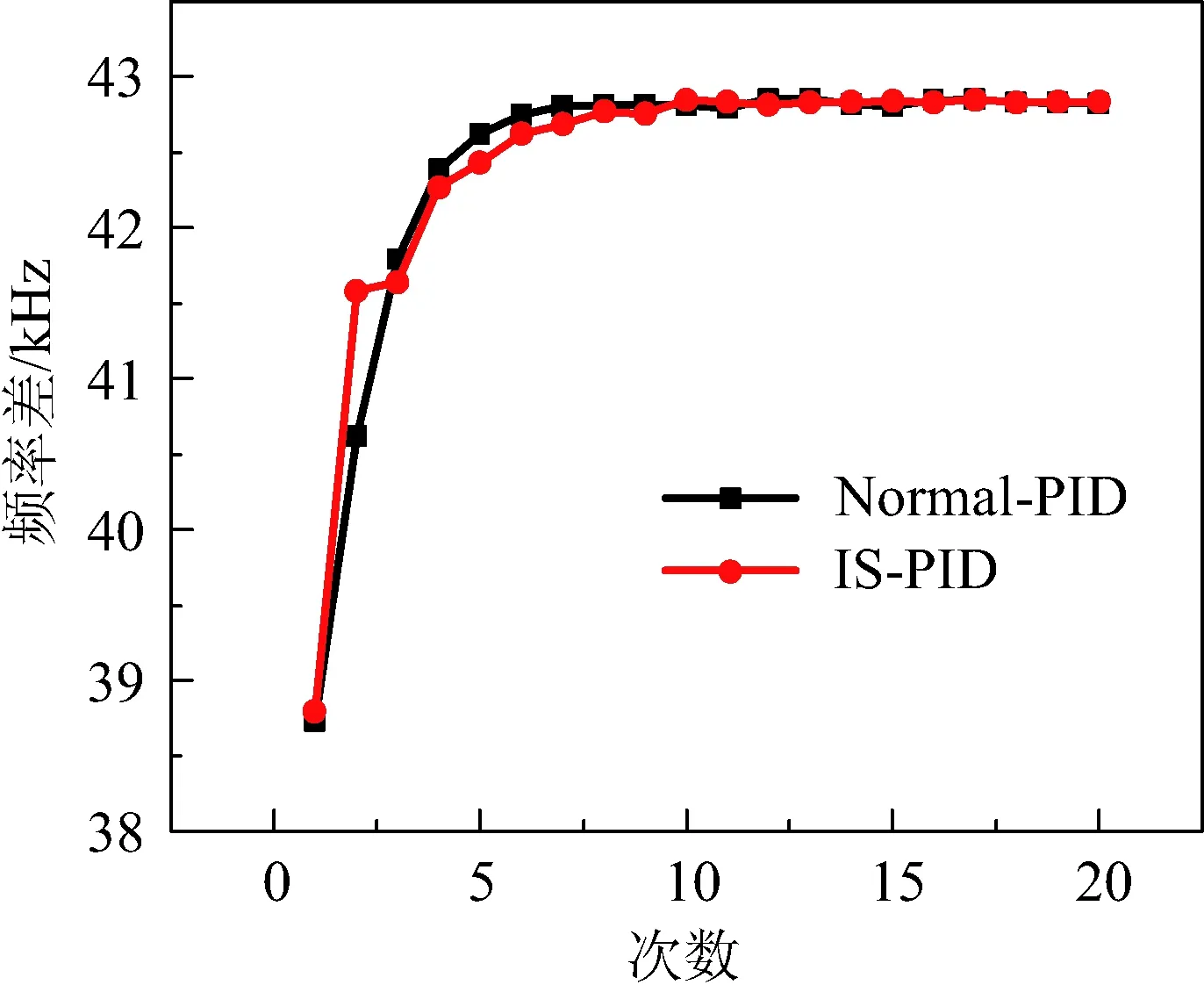
圖10 基本PID優化及積分分離PID優化對比Fig.10 Comparison between normal PID and integral separation PID
由圖10可知,在控制量到達設定的閾值之前,積分分離PID算法的反應速度較普通PID算法較快,能及時做出反應并控制,在達到閾值之后,積分分離算法的優化速度得到一定的降低,從而保證了優化的準確性。一定程度上積分分離算法優化的速度較快,準確性較好。
3 測試結果對比
對多只銫束管進行C場的優化,優化結果見圖11~圖13。將最后的優化結果與已知的測試平臺優化結果進行對比,并將最優C場電流值作為對比的依據,對比結果見表2。
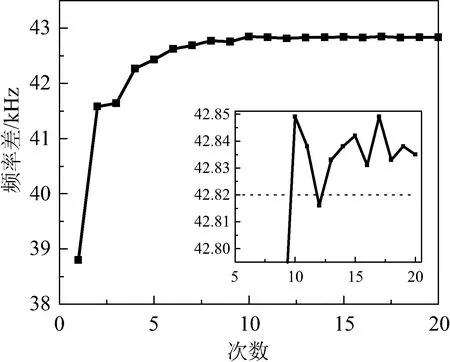
圖11 第1只銫束管優化結果Fig.11 First cesium beam tube optimization results
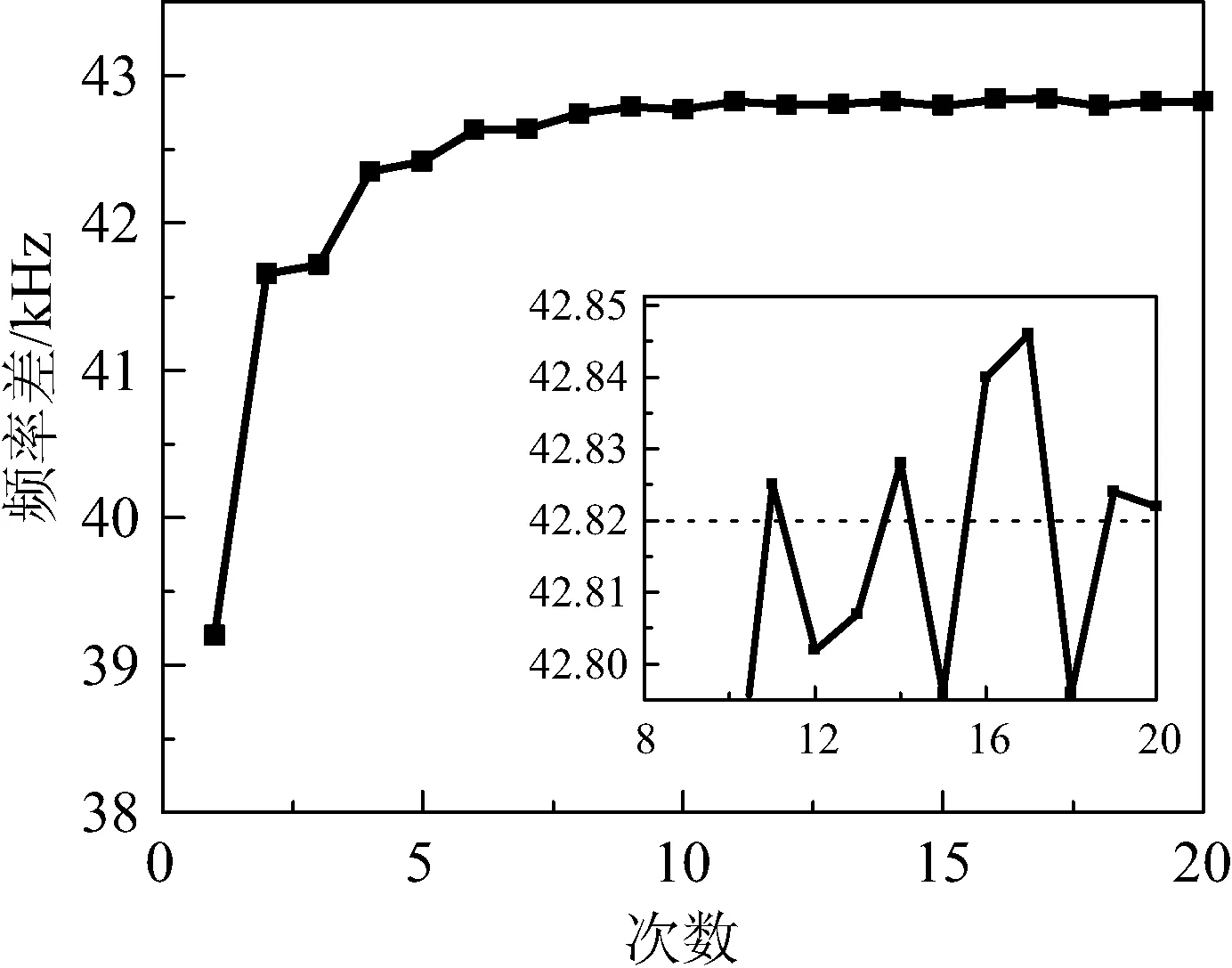
圖12 第2只銫束管優化結果Fig.12 Second cesium beam tube optimization results
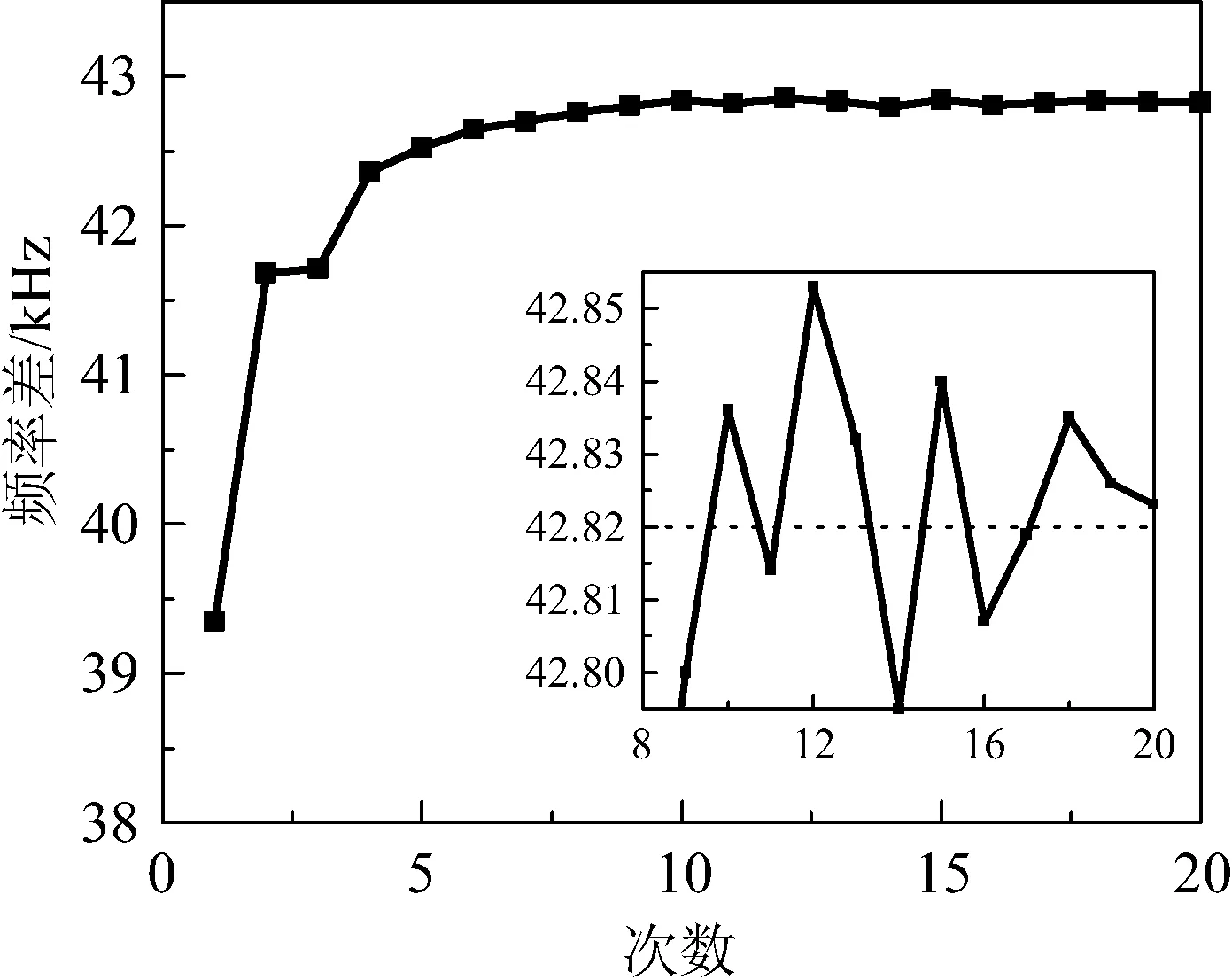
圖13 第3只銫束管優化結果Fig.13 Third cesium beam tube optimization results
由優化最終結果可以看出,3只銫束管(0~0)峰與(-1~-1)峰頻率差最終的誤差均控制在允許誤差范圍±20 Hz之內,C場電流優化分辨率達到1 μA量級,通過自研銫束管測試系統優化的最優C場電流與已有測試平臺測試所得的最優C場電流誤差不超過0.02 mA,在允許的誤差范圍之內,這也驗證了該測試系統對C場優化的正確性與準確性。
4 結束語
通過使用PID算法,對性能參數處于未知狀態的銫束管進行了C場的優化,確定了一種工程上較為理想的優化方案,也為自動化銫束管性能測試系統提供了一種可靠的C場優化方法。該優化方法雖然針對磁選態銫束管,同時對激光抽運銫束管C場的優化同樣有借鑒作用,這是因為激光抽運銫束管使用了同樣的Ramsey微波腔和C場,可獲得類似的Ramsey花樣[17-18]。
優化結果分析如下:
1)PID算法參數設定為kp=7,ki=0.02,kd=3,并采用積分分離式PID算法,在迭代次數設置為20次的時候,能將最終的(0~0峰)與±1峰頻差控制在42.820 kHz±20 Hz;
2)將該自動測試系統的優化結果與已有的測試平臺手動的優化結果進行對比,頻率差優化結果優于已有的測試平臺,銫束管最優C場電流與已有測試平臺優化結果誤差小于0.02 mA。
目前PID算法的誤差E(k)控制在±20 Hz,為了滿足更高精度的優化,后續工作將通過提高Ramsey線形掃描的精度進一步提升PID算法的精度與準確度,保證達到±10 Hz以內的誤差,同時還要將最優C場電流精度控制在±0.002 mA范圍內,這是實現銫原子鐘另一項關鍵指標——頻率復現性達到1×10-13水平的要求。由于環境因素、電子元器件老化等因素的影響,銫束管工作一段時間之后最佳C場電流值發生了變化,所以需要進行實時的動態調整。下一步工作是將該優化算法在整鐘工作時的C場動態調整中實現。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
