基于專利分析的在軌服務機器人發展研究
2020-05-06 00:57:50王永芳黃劍斌宋潔瓊
載人航天 2020年2期
王永芳,黃劍斌,宋潔瓊
(1. 中國航天系統科學與工程研究院, 北京100048; 2. 錢學森空間技術實驗室, 北京100094)
1 引言
在軌服務機器人主要由基體及搭載在基體上的機械臂和操作末端組成,可以在太空中完成各種自主操作任務,在軍用和民用領域均有迫切的研究需求和廣闊的應用前景[1]。 近年來,人工智能、機器人等新興技術飛速發展,為在軌服務機器人提供了良好的研究基礎[2]。 美國、歐洲、加拿大等國家或地區均開展了相應的在軌服務機器人研制項目和發展計劃。 在各國的技術發展過程中,針對關鍵技術的攻關與創新,涌現出許多專利,在核心技術分布和地域部署上均形成了專利體系化布局。
在全球高新技術爆炸式發展、專利申請激增的形勢下,挖掘利用海量專利信息成為掌握技術發展動態、洞察技術發展方向和促進技術進步的重要方式[3],但目前尚未用于在軌服務機器人領域。 為此,本文基于德溫特世界專利索引數據庫(Derwent World Patents Index,DWPI),以空間機械臂、操作末端、在軌自主操作為關鍵技術,對在軌服務機器人技術進行全球專利檢索,從時間、地域、技術、申請人等多角度對專利數據進行剖析,全面了解在軌服務機器人技術的發展過程、技術研究熱點,用以幫助國內創新主體了解競爭對手情況。
2 技術發展趨勢分析
截止檢索日(2018 年7 月20 日),全球公開的在軌服務機器人相關專利申請共1151 項。 對上述相關專利利用時序分析方法,研究專利申請量隨時間逐年變化情況,結果如圖1 所示。 可見,在軌服務機器人技術的專利申請最早出現在20世紀70 年代,發展趨勢可以劃分為萌芽期(1973—1983 年)、發展期(1984—2007 年)和快速發展期(2008 年至今)。

圖1 在軌服務機器人全球專利申請趨勢Fig.1 Globe patent application trends of on-orbit servicing robot technology
2.1 萌芽期
在萌芽期(1973—1983 年),在軌服務機器人的專利申請量較少,年均申請量僅有7 項。 該階段的專利申請主要來自于美國和加拿大,主要涉及航天器模塊更換操作。 例如,1976 年加拿大Spar 公司申請了專利CA1049586A1,涉及航天器模塊更換系統,主要采用可旋轉和可移動的機械手對在軌衛星進行維護,實現航天器之間的模塊交換。 之后,美國通用公司在1978—1984 申請了4 項與在軌模塊更換與裝配相關的專利申請,專利US4308699 A 公開了一種用于構造大型空間結構和自動裝配、維護和修理系統;專利US4298178 A 涉及無人維護的航天器,用于對地球靜止軌道衛星進行損壞模塊更換;專利US4657211 A 用于航天飛機對在軌航天器進行有效載荷模塊維修或更換,其采用遠程操作機械臂實現衛星捕獲與固定;專利US4964596 A 用于在航天飛機軌道上進行裝配和維護工作的空間飛行器,使用遙控臂、對接耦合裝置、動力模塊和通信總線模塊等。
2.2 發展期
在發展期(1984—2007 年),在軌服務機器人技術的專利申請量開始呈現逐年上升趨勢,年申請量在6~38 項,年均申請量達到17 項。
在該時期內,美國、德國、加拿大、日本均開展了自主在軌服務相關項目。 其中,美國從20 世紀80 年代開始開展空間在軌服務項目,包括空間在軌服務機器人FTS、DART 計劃、XSS 計劃、OE 計劃等;德國從1986 年開始啟動ROTEX 空間在軌服務機器人項目,之后相繼開展了ESS 計劃、ROKVISS 機械臂項目、TECSAS 項目等;加拿大SPAR 公司[4]相繼研制開發了航天飛機遙機械臂系統(SRMS)、空間站遙操作機械臂系統(SSRMS)和靈巧機械臂(SPDM);日本在1997 年開展了第一個空間機器人臂飛行試驗,而且日本宇宙航空研發機構研制的機器人ETS-VII 開始為國際空間站服務;歐空局從1999 年開始實施ERA項目[5]。
上述國外在軌服務機器人研制項目的開展逐步推動了該技術領域的專利申請量逐步上升,主要涉及空間機械臂、操作末端和自主在軌模塊更換與裝配技術。
2.3 快速發展期
在快速發展期(2008—2018 年),在軌服務機器人技術的專利申請量呈現快速上升趨勢,年專利申請量在32 ~138 項,年均專利申請量達到了64 項。
在該階段,美國、德國、日本、加拿大和歐空局的相關項目開始進入飛行試驗驗證階段[6],并開啟了與空間目標近距離檢測、非合作目標逼近與抓捕、在軌飛行器維修與在軌重構、空間在軌加注等技術相關的在軌服務項目。 隨著這些項目的開展,在軌服務機器人技術的專利申請快速增多。
該階段的專利申請主要涉及操作末端技術、空間目標捕獲與跟蹤技術和空間碎片清理技術等。 另外,該階段的中國專利申請量也開始呈現快速上升趨勢。
3 技術優勢國家或地區分析
通過各國的專利申請量統計(圖2),了解各國家或地區間的技術實力和創新特點。
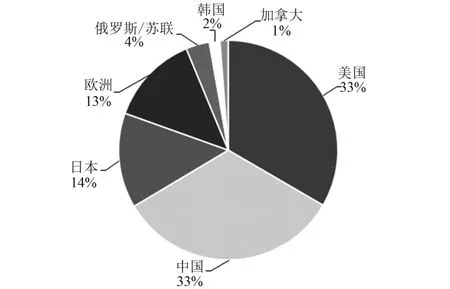
圖2 全球專利區域分布分析Fig.2 National distribution of globe patents
在軌服務機器人的專利申請主要來自于美國、中國、日本和歐洲。
3.1 美國
美國的專利申請量排名第一,共有384 項。美國從20 世紀80 年代初開始陸續開展了多個空間在軌服務機器人項目,目前已經對各種類型的在軌服務機器人進行了在軌飛行驗證[7-8],其技術發展特點在于廣泛集合了多方的國際合作。 加拿大MDA 公司、加拿大航天局、Astrium 公司和日本科學技術振興機構等均參與過美國的在軌服務機器人相關研制項目,并在美國申請了相關專利,這種國際技術合作大大促進了美國在軌服務機器人技術的快速發展,促使其專利申請量和技術實力始終處于國際領先地位。
在空間機械臂技術領域,美國的專利技術創新側重于空間冗余構型設計和自主操作技術;在操作末端技術領域,美國則主要側重于空間仿人靈巧手和空間目標對接技術方面的創新與突破;在自主操作技術領域,美國在自主在軌加注、在軌模塊更換與裝配和空間碎片清理方面的專利申請量均較高。
3.2 中國
中國的專利申請量排名第二,共有381 項。近些年,中國在空間站組建、艙外活動與試驗、在軌衛星維護方面,對在軌服務機器人的需求日益上升,促進了國內技術研發速度,在機械臂、操作末端和自主在軌操作技術方面取得了不少技術突破,雖然與國外還存在一定技術差距,但在技術創新成果數量上已呈現出較快的發展勢頭。
中國空間機械臂的技術創新側重于軌跡規劃和機械臂冗余構型設計,并在機械臂地面測試、驅動和鎖定裝置等方面申請了專利。 在操作末端技術領域,中國側重于空間目標對接結構方面的技術改進。 但是,在自主操作技術領域,中國相對美國技術差距較大,技術創新主要以高校的總體技術方案設計為主。
3.3 日本
日本的專利申請量排名第三,共有162 項。日本不僅具有本國的在軌服務機器人研制項目,還參與了美國相關項目的研制。 近些年,基于在軌服務機器人的軍民兩用效益,日本在民用技術試驗驗證的名義下不斷助力其軍事航天能力的發展。 在自主操作技術領域,日本以空間碎片清理技術創新為主,IHI 公司和Sstroscale 公司還參與了NASA 的技術轉移合作研發項目,技術方案側重于魚叉繩系機器人和電磁吸附抓捕。
3.4 歐洲
歐洲的專利申請量排名第四,共有153 項,主要來自于德國、法國、英國,具體包括德國專利83項、法國專利27 項、英國專利17 項以及26 項歐洲專利局申請。 其中,德國的專利申請主要來自于歐洲宇航防務集團和德國宇航中心,部分德國高校也參與了相關項目研制和技術創新,如德國亞琛工業大學、柏林大學等。
歐洲專利的研究熱點集中在操作末端技術領域,側重于操作末端精細化操作以及空間目標對接方面的技術改進。 另外,在自主操作技術領域,歐洲專利主要涉及在軌模塊更換與裝配和空間碎片清理技術的創新,與之有關的國家研制計劃包括德國的IBOSS 模塊化航天器研制計劃[9]、歐洲的E.Deorbit 任務和“空間碎片清除”演示驗證任務。
另外,加拿大的在軌服務機器人研制技術相對領先,但由于其主要創新主體參與了美國和歐洲的空間在軌服務項目研制,因此部分技術創新成果優先在美國或歐洲申請專利,造成本國申請量相對較少。
4 技術創新單位分析
排名前26 位申請人的專利申請量統計如圖3 所示。
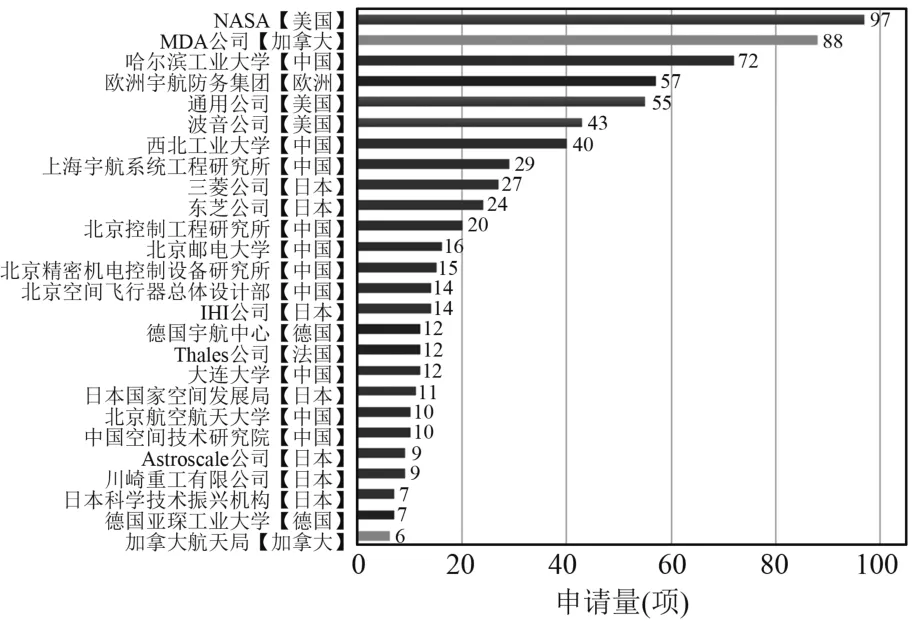
圖3 全球專利申請人排名Fig.3 Ranking of global patent applicants
NASA 在在軌服務機器人領域的專利申請量排名第一,有97 項相關專利申請,主要涉及空間機械臂和操作末端技術。 NASA 作為美國在軌服務研制計劃的主要負責單位[7-8],先后發起了DART 計劃、機器人航天員、機器人燃料加注任務等項目,并與DARPA 聯合管理軌道快車項目。另外,NASA 還資助中小企業參與在軌服務技術創新計劃,并在全球申請布局了較多專利。
MDA 公司是加拿大主要的技術創新主體,專利申請量排名第二,有88 項相關專利申請。MDA 公司基于其先進的空間機器人技術,已成為美國空間飛行器自主在軌服務與維護項目的主要研制方之一,參與了美國的“軌道快車”計劃、“鳳凰”計劃和“蜻蜓”項目,研制了可以在GEO上開展在軌加注任務的空間基礎設施服務(SIS)航天器。 從其專利技術方案分析情況來看,其在2007—2011 年期間申請了28 項自主加注技術相關專利,具體涉及衛星燃料加注系統、控制工具、推進劑轉移等技術方面,對中國自主在軌加注、空間目標對接等方面的技術改進具有較大的技術借鑒價值。
哈爾濱工業大學作為我國在軌服務機器人的主要創新主體,在2008—2017 年共申請了72 項相關專利。 從我國的十五計劃(2001—2005 年)開始,哈爾濱工業大學機器人技術與系統國家重點實驗室面向機械手在空間維修維護中的潛在應用,開展了靈巧手、機械臂、柔順控制、人機協同及遙操作等前沿方向的創新性研究,實現了人機協同操作中安全性、靈巧性、交互性等關鍵技術的突破。 2016 年,哈爾濱工業大學研制的空間機械手成功完成了天宮二號人機協同在軌維修科學試驗,展示了該校在空間飛行器自主在軌服務與維護技術領域的技術先進性。 與上述研究團隊的研制情況相對應,本文共檢索獲得了20 多項劉宏教授、劉伊威教授的專利,主要涉及空間大型機械臂及末端執行器、大容差柔性捕獲機構、軌跡規劃方法、交會對接和軌道工作更換器。
歐洲宇航防務集團是世界上第二大航空航天公司,其在軌服務機器人技術專利申請量排名第四,在1980—2012 年申請了57 項相關專利,這些專利申請大多來自于其控股的Astrium 公司和空中客車公司,主要涉及操作末端和空間碎片清理技術。
通用公司在軌服務機器人的專利主要涉及空間機械臂技術和自主操作技術。 2010 年,通用汽車公司與約翰遜航天中心機器人系統技術部聯合開發了機器人航天員2(Robonaut2),可與人協同工作,用于代替航天員進行艙外作業以及從事其他太空研究和探索工作。 在NASA 資助合同SAA-AT-07-003 下,NASA 和通用公司在2008—2015 年聯合申請了42 項與Robonaut2 相關的專利。
波音公司在1986—2016 年期間申請了43 項相關專利,主要涉及操作末端和自主在軌操作技術。 波音公司作為美國國防高級研究計劃局(DARPA)“軌道快車”計劃的主要承研單位,提供了作為維修衛星的“自主空間傳送機器人軌道器”(Autonomous Space Transport Ro-botic Orbiter,ASTRO),并進行了在軌衛星自動服務演示。 在“軌道快車”計劃中,波音公司在2000—2006 年申請了20 多項相關專利,主要涉及在軌加注技術和空間目標捕獲與跟蹤技術中的多衛星與服務飛行器對接技術、推進劑轉移技術、在軌服務飛行器系統等。
西北工業大學的專利申請量排名第七,有40項相關專利,主要涉及機械臂和空間目標捕獲與跟蹤技術。 近些年,西北工業大學在自主在軌服務技術領域取得了較多技術突破,申請了多項空間繩系機器人相關專利,可以用于抓捕非合作目標或撓性目標衛星。
三菱公司和東芝公司作為日本的主要創新主體,分別以27 項和24 項的相關專利申請量排名第九和第十。 同時,同為日本重要航天研制單位的IHI 公司和Astroscale 公司雖然排名稍顯靠后,但在空間碎片清理技術方面是日本的主要創新主體。 德國宇航中心作為歐洲的另一個主要創新主體,有12 項相關專利。
上海宇航系統工程研究所、北京控制工程研究所、北京精密機電控制設備研究所和北京空間飛行器總體設計部等作為中國航天科技集團的研究所,近些年在自主在軌服務技術領域取得了較大技術突破,共申請了88 項相關專利。 另外,由于中國航天科研院所研究項目的涉密程度較高,還有部分技術創新采用了國防專利形式進行權利保護。
5 國外重點項目專利分析
5.1 第二代機器人航天員(Robonaut2)
NASA 于1999 年推出了機器人航天員(Robonaut),在此基礎上,約翰遜航天中心(JSC)與通用汽車公司合作聯合研制的第二代機器人航天員(Robonaut2),并于2011 年進入國際空間站,成為空間類人機器人發展的里程碑。 Robonaut2 的研制目的是與人協同工作,代替航天員進行艙外作業以及從事其他太空研究和探索[10]。
針對Roubonaut2 的研制,NASA 與通用汽車公司簽訂了資助合同,合同號為SAA-AT-07-003。在該資助合同下,NASA 和通用汽車公司在2008—2015 年聯合申請了42 項與第二代機器人宇航員Robonaut2 相關的專利,如表1 所示。
Roubonaut2 的相關專利主要布局在美國、日本和德國。 其中,Roubonaut2 在美國、日本、德國的專利布局起始時間早且持續性好,布局專利技術方案涉及Robonaut2 的所有技術創新。 另外,Roubonaut2 的部分專利選擇在中國、加拿大和澳大利亞對進行了布局,涉及的技術主要包括整體結構、任務規劃、靈巧操作控制和驅動,這些技術可以在工業技術領域進行技術轉移,具有較大的商業推廣應用價值。
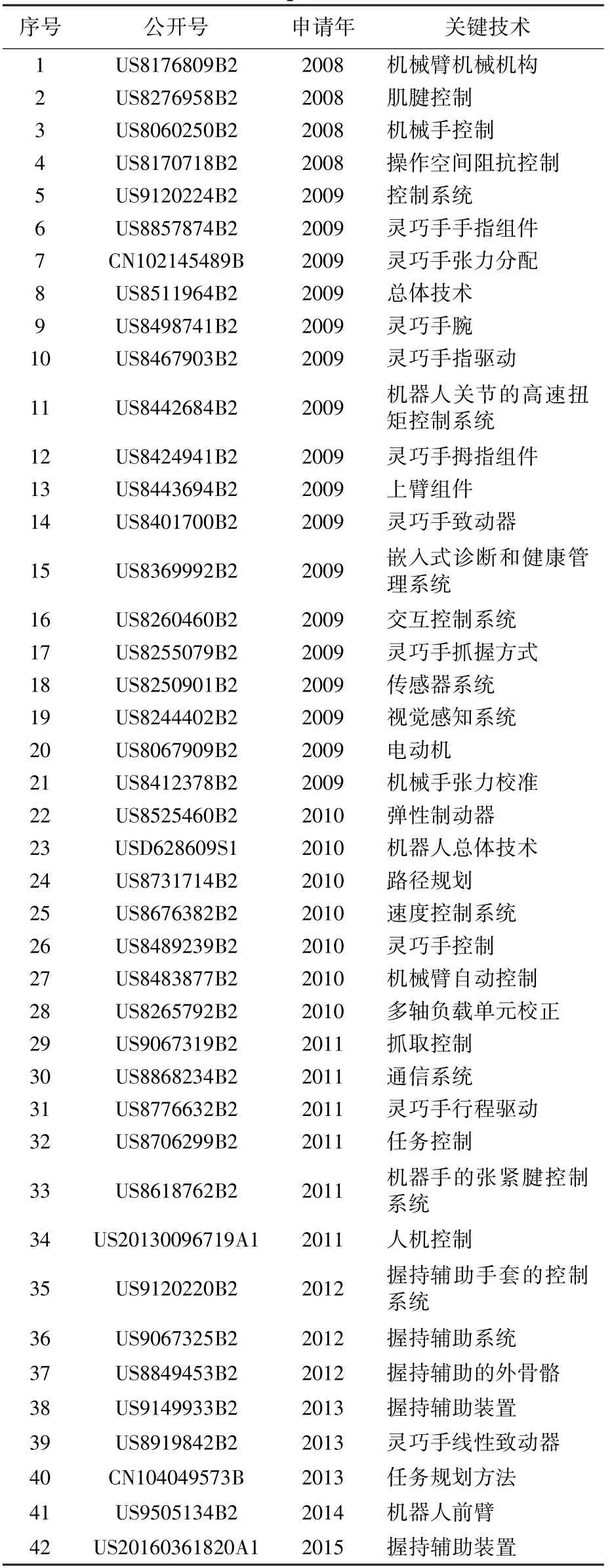
表1 第二代航天員相關專利Table 1 Related patents of Robonaut2
5.2 MDA 公司自主加注服務航天器
MDA 公司研制的空間基礎設施服務(SIS)航天器可以在GEO 上開展在軌加注任務[11],可以攜帶推進劑箱到達GEO,并裝備了機械臂和工具箱來維護衛星,其工具箱可以打開大部分GEP 衛星的推進劑系統,機械臂可以固定目標衛星,便于加注,也可以用于打開故障太陽能電池翼,并能提供廢棄衛星離軌服務。 圍繞上述服務航天器的研制,MDA 公司申請了一系列專利對其關鍵技術進行權利保護。 本文篩選了6 項代表MDA 公司自主加注服務航天器核心技術的專利,如表2 所示。
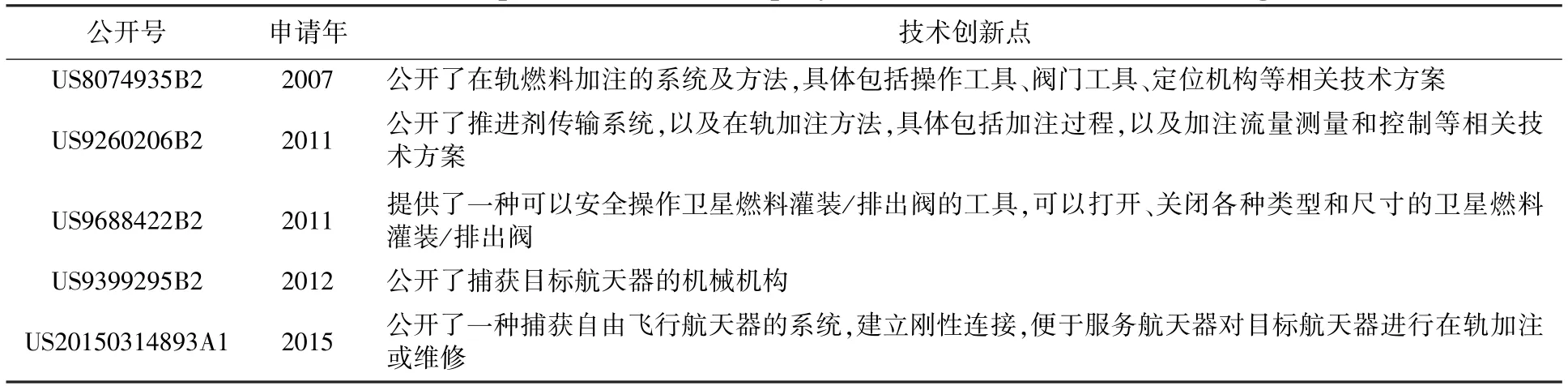
表2 MDA 公司自主加注技術的核心專利Table 2 Core patents of MDA company in autonomous on-orbit refueling
5.3 其他重要項目
美國、加拿大、歐洲和日本的在軌服務機器人技術處于世界領先水平,其重點研制項目的專利技術方案具有較大的分析應用價值。
5.3.1 TALISMAN 機械臂
在2014 年公布的小行星重定向任務(Asteroid Redirect Mission,ARM)中,NASA 采用了一種新穎的肌腱-致動輕型空間機械臂(Tendon-Actuated Lightweight In-Space Manipulator,TALISMAN)
系統[12]。 該機械臂適用于零重力環境和有重力場環境,不僅可以用于ARM 任務中進行行星抓取,而且可以用于在空間精確放置有效載荷以及進行空間裝配、維修等任務。 該機械臂專利US9168659B2,結構與傳統的臂架/旋轉鉸鏈機械臂結構相比,使用具有肌腱控制的關節結構的張力/壓縮構件結構來實現高結構效率,可以實現長距離高性能有效載荷操作。
5.3.2 SARAH 機械手
自適應機器人輔助手(Self-Adapting Robotic Hand,SARAH)是專為國際空間站靈巧機械臂SPDM 開發的操作機械手[13],以支持SPDM 在國際空間站上完成越來越復雜的靈巧操作。
SARAH 機械手的核心方案涉及機械手指、末端驅動與致動技術,加拿大拉瓦爾大學針對上述核心技術申請了專利,具體包括專利US5762390、US6669257 和 US6505870B1。 其 中, 專 利US5762390 公開了SARAH 機械手指的技術方案;專利US6669257 公開了SARAH 由SPDM 操作末端驅動時的電力切換機構方案; 專利US6505870B1 公開了為加拿大航天局CSA 開發的SARAH 的致動系統方案。
5.3.3 “蜻蜓”在軌衛星組裝項目
DARPA 資助的“蜻蜓”項目,應用目標包括軍用和民用,其項目概念在于利用處于“有效貯藏”狀態的衛星進行在軌自組裝,關鍵點為大型射頻天線反射器的安裝與重構[6]。 “蜻蜓”在軌衛星組裝項目的相關專利為勞拉空間系統公司在2015 年申請的專利US20160264264A1,主要涉及通信衛星發射配置以及在軌裝配技術改進。
5.3.4 “蜘蛛制造”空間制造系統
2015 年4 月,美國系繩無限公司研制了一種被稱為“蜘蛛制造”的空間制造系統,該系統利用蜘蛛狀機器人在軌進行大型空間結構集成,能夠在軌建造大型天線、航天器桁架和太陽電池帆板[6]。 另外,2017 年6 月,美國DARPA 授予繩系無限公司合同,開始研發“太空制造與裝配機器人(OrbWeaver)”[7]。 OrbWeaver 是一種太空制造設備,可以通過增材制造技術制造天線反射器,并通過機器人將其同射頻的系統裝配成一個小型通信衛星,旨在通過OrbWeaver 系統,基于太空回收、制造、機器人裝配技術,在軌構建小型高吞吐量通信衛星。
涉及上述兩個在軌制造項目的核心專利,分別為WO2017123677A1 和US20160067919。 其中,專利WO2017123677A1 公開了在軌制造天線的技術方案;專利US20160067919 公開了在軌制造桁架結構的系統和方法,該專利由DARPA 資助,資助合同號為HR0011-11-C-0107。 上述兩個專利的發明人Hoyt Robert 是“蜘蛛制造”空間制造系統的技術負責人。
5.3.5 IBOSS 在軌服務與組裝項目
2010 年德國宇航局提出了IBOSS 項目(IBOSS building blocks,iBLOCK),對航天器的結構模塊化設計展開研究[14]。
IBOSS 主要采用標準化模塊(iBLOCK,IBOSS building blocks)、智能空間系統接口(ISSI),形成可在軌組裝和維修的航天器系統,提高了在軌航天器的可維護性、可升級性和可重新裝配性。 該項目的研究團隊主要包括柏林工業大學航空航天研究所、卡爾斯魯厄計算機科學研究中心、亞琛工業大學結構力學與輕量化設計研究所和RIF 研究與轉移研究所。 從專利申請情況來看,僅有亞琛大學申請了與智能空間系統接口(iSSI)相關的專利US20170015443A1,公開了一種構造模塊化結構航天器的陰陽耦接裝置,用于航天器模塊間的耦接操作。
5.3.6 歐洲空間碎片清理任務
歐洲近些年啟動的空間碎片清理任務主要包括E.Deorbit 任務和“空間碎片清除”演示驗證任務[15]。
E.Deorbit 演示驗證航天器將在2023 年執行首次主動碎片清除任務,該項目正在研究2 種捕獲技術。 一種技術是配備夾持器的機械臂,可抓捕航天器上的附件。 另一種技術是太空漁網,該裝置將在投放后包裹住空間碎片,一旦空間碎片被勾住或被包裹住,E.Deorbit 航天器將利用自身推進器降低空間碎片的軌跡,并使其在大氣層中銷毀。
另外,歐洲的“空間碎片清除”演示驗證任務將使用“太空漁網”、“魚叉”和阻力帆裝置,使2顆試驗性立方體衛星從高度為400 km 的軌道脫離。
針對上述2 個歐洲空間碎片清理任務,檢索獲得了4 項相關專利,分別為歐洲防務集團的專利US20150151856A1、EP3015369A1、US9022323B2 和US7168660B2。 其 中,專 利US20150151856A1 和EP3015369A1 是EADS 控股的空客公司申請,主要涉及魚叉空間碎片捕獲或攔截技術;另2 個專利US9022323B2 和US7168660B2 主要涉及太空漁網清理空間碎片技術。
5.3.7 日本空間碎片清除計劃
日本是最早開展空間碎片清理技術研究的國家之一,早在1991 年日本就申請了相關專利,主要涉及用于打撈不再運作的失效飛船的空間航天器系統,以保持空間環境清潔。
從20 世紀開始,日本針對空間碎片清理相繼提出了繩系收集和電磁吸附離軌的技術方案。 例如,日本川崎重工的專利JP03809524B2,涉及用于收集廢棄空間碎片的系繩裝置,其在捕獲機構和系繩機構之間提供動力和交換操作信息信號;而該公司的專利JP04538591B2 則主要采用電子吸附的方式進行空間碎片清理。
近些年,日本空間碎片清理的技術方案開始呈現多種形式共同發展趨勢,日本IHI 公司提出了一種空間碎片清除裝置,可以在空間碎片旋轉狀態下在其上安裝減速裝置,從而實現碎片離軌操作;之后,日本IHI 公司又申請了魚叉插取空間碎片的相關專利,通過引導構件調整魚叉的射擊角度,近距離調整角度后發射魚叉,降低魚叉偏離誤差,避免魚叉彈射或擊碎碎片的問題,從而準確地捕獲碎片。 上述技術方案的涉及到的專利包括US9463884B2 和US20170113818A1。
6 小結
1)將中國未來技術發展方向作為專利布局的重點技術領域,彌補中國專利布局空白。
隨著中國在軌服務機器人研制計劃的推進,針對空間大負載傳動技術、靈巧操作工具、空間仿人靈巧手、自主在軌加注的精細操作和安全控制,具有較大技術研究需求;從中國專利的技術分布情況來看,目前中國在上述技術領域內的創新量較低,是未來需要加大自主創新的重要技術領域。
在中國空間機器人研制與技術創新過程中,應將空間大負載傳動技術、靈巧操作工具、空間仿人靈巧手、自主在軌加注的精細操作和安全控制等關鍵技術領域作為中國專利布局的工作重點,一是加強中國自有知識產權的及時有效保護,彌補中國專利布局空白點;二是避免國外專利布局對中國未來核心技術發展構成壁壘,影響技術突破方向的選擇。
2)針對具有技術轉移和國際合作需求的關鍵技術領域,在確保國內專利布局優勢的同時,積極擴展國外專利布局。
基于在軌服務機器人技術的軍民兩用特性,部分關鍵技術具有向民用領域推廣的可行性,具體包括冗余構型空間機械臂技術、大負載低自重傳動技術、機械臂軌跡規劃技術、機械臂遙操作技術、空間目標對接技術、自主在軌加注技術、空間碎片清理技術等。
在上述關鍵技術領域內,中國具有一定的研究基礎和專利布局,但為了適應未來技術轉移的市場發展需求,需要加強國內的專利布局全面性,以確保中國技術單位在這些關鍵技術領域內的國內專利布局優勢。 另外,考慮這些技術開發的國際技術合作需求,應該在國內全面布局基礎上擴展國外專利布局,并將歐洲和一帶一路沿線國家等作為優先考慮區域。
參考文獻(References)
[ 1] 林益明, 李大明, 王耀兵, 等. 空間機器人發展現狀與思考[J]. 航天器工程, 2015, 24(5): 1-7.
Lin Y M,Li D M,Wang Y B. Current status and analysis of space robot[J]. Spacecraft Engineering, 2015, 24(5): 1-7.(in Chinese)
[ 2] 李巖, 黨常平. 空間在軌服務技術進展[J]. 兵工自動化,2012(5): 79-82.
Li Y, Dang C P. Space orbit service technology progress[J].Ordnance Industry Automation, 2012(5): 79-82.(in Chinese)
[ 3] 毛金生, 馮小兵, 陳燕. 專利分析和預警操作實務[M].北京: 清華大學出版社, 2009.
Mao J S, Feng X B, Chen Y. Patent Analysis and early Warning Operating Practices[M]. Beijing: Tsinghua University Press, 2009.(in Chinese)
[ 4] MacDonald Dettwiler Space and Advanced Robotics Ltd.The shuttle remote manipulator system-the canadarm[EB/OL].https:/ /www.ieee.ca/millennium/canadarm/canadarm_technical.html.
[ 5] ESA.The Geostationary Servicing Vehicle (GSV)[EB/OL].https:/ /www.esa.int/Enabling_Support/Space_Engineering_Technology/Automation_and_Robotics/The_Geostationary_Servicing_Vehicle_GSV.
[ 6] NASA.NASA’s Dragonfly project demonstrates robotic satellite assembly critical to future space infrastructure development[EB/OL]. [2017-09-13]. https:/ /www.nasa.gov/mission _ pages/tdm/irma/nasas-dragonfly-project-demonstratesrobotic-satellite-assembly-critical-to-future-space.html.
[ 7] Orbital manufacturing and construction technologies [ EB/OL]. [2017-07-26]. http:/ /www.tethers.com/SpiderFab.html.
[ 8] DARPA.Robotic payload for RSGS mission moves to next phase of development. (RSGS)[EB/OL]. [2018-08-17].https:/ /www.darpa.mil/news-events/2018-08-17.
[ 9] Schervan T, Kortmann M, Schroder K, et al. iBOSS modular plug & play-standardized building block solutions for future space systems enhancing capabilities and flexibility, design,architecture and operations[C]/ /68thInternational Astronautical Congress (IAC), Adelaide, Australia, 2017.
[10] NASA.NASA. Roubonaut2 [EB/OL]. [2013-01-02]. https:/ /www.nasa.gov/mission_pages/station/multimedia/gallery/iss034e013942.html.
[11] SSL.MDA announces on-orbit satellite servicing business formation and contract awards for spacecraft and first life extension customer[EB/OL]. [2017-06-28]. http:/ /sslmda.com/html/pressreleases/pr20170628.php.
[12] Doggett W R,Dorsey J T,Jones T C, et al. Development of a tendon-actuated lightweight in-space manipulator (TALISMAN)[C]/ /42ndAerospace Mechanisms Symposium, Baltimore, MD, United States. NF1676L-17335, 2014.
[13] Rubinger B, Brousseau M, Lymer J, et al. A novel robotic hand-SARAH for operations on the international space station[C]/ /7thESA Workshop on Advanced Space Technologies for Robotics and Automation ‘ASTRA 2002’, 2002: 19-21.
[14] Orbital manufacturing and construction technologies [ EB/OL]. [2017-08-25]. http:/ /www.tethers.com/SpiderFab.html.
[15] iBOSS.The iBOSS concept[EB/OL]. [2018-11-05]. http:/ /www.iboss-satellites.com/iboss/philosophy/.
[16] ESA’s e. Deorbit debris removal mission reborn as servicing vehicle[EB/OL]. [2018-12-21]. https:/ /www.esa.int/Safety_Security/Clean_Space/ESA_s_e.Deorbit_debris_removal_mission_reborn_as_servicing_vehicle.
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
今日農業(2019年14期)2019-09-18 01:21:54
電腦報(2019年40期)2019-09-10 07:22:44
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年9期)2017-08-22 02:57:56