環境狀態監測終端硬件設計
2020-05-09 09:56:17李蘇炫柴夢情張金亮
物聯網技術 2020年4期
關鍵詞:物聯網
李蘇炫 柴夢情 張金亮
摘 要:針對當下物聯網技術快速發展,對物流運輸可靠、安全、智能監測的需求愈加強烈的現象,設計了一種基于無線傳感網絡的微環境監測終端系統。系統主要由主控數據處理模塊、電源供電模塊、外圍接口模塊、GPRS模塊、GPS模塊與液晶顯示模塊等組成,文中對主要模塊的硬件進行了詳細設計和分析。測試結果表明,該系統各硬件模塊設計合理,能夠較好地滿足功能需求。
關鍵詞:環境監測;液晶顯示;GPRS;傳感器;GPS;物聯網
中圖分類號:TP11文獻標識碼:A文章編號:2095-1302(2020)04-00-04
0 引 言
社會和經濟的快速發展及國內汽車產業的發展壯大,為貨物流通和交通運輸帶來了巨大的變化,也逐步改變了長期以來“重生產、輕流通”的思想。運輸過程中如何對貨物和產品狀態進行有效、全面的檢測逐步受到廣泛關注,對其相關技術展開深入研究也是實現安全、可靠、智能、綠色物流的關鍵所在[1]。
傳統有線傳輸監測技術往往存在成本較高、線束多、故障排查困難等缺點,而新興的物聯網技術可以很好地解決上述問題[2-3],該技術在眾多環境監測領域也得到了廣泛應用,如室內家庭環境監測[4]、煤礦作業環境監測[5]、車載移動環境監測[6-7]等。
本文基于智能傳感、車載定位、物聯網等技術,設計了一種基于無線傳感網絡的環境監測終端系統,由各類傳感器實時、準確地采集環境數據,并對相應數據進行本地存儲,按照設定的通信協議上傳至服務中心。
1 系統總體設計
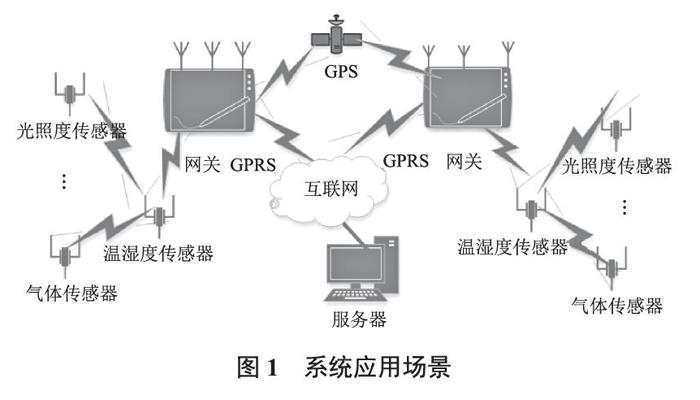
根據實際應用需求,系統實際應用場景及模塊構成如圖1所示。
系統旨在實現對車載微環境信息及數據的采集,用戶可在智能網關模塊實時查看環境的溫濕度、光照度、空氣質量、車載設備經緯度等信息,并根據預設的閾值實時判斷環境質量,對于異常及時發送提示信息,方便用戶做出決策。此外網關模塊可定時將采集的數據上傳至遠程服務器,便于后期進行數據分析與追蹤。
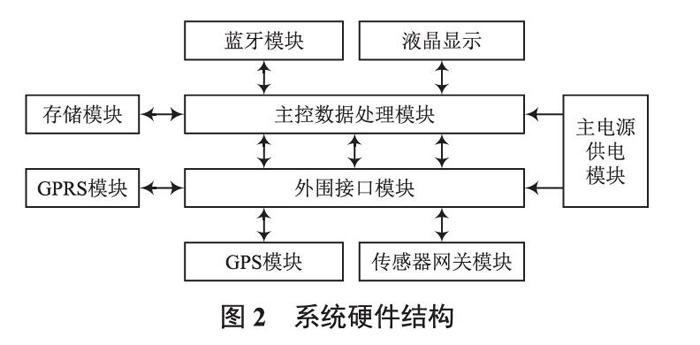
系統采用模塊化設計,硬件總體結構如圖2所示。系統主要包括主控數據處理模塊、電源供電模塊、外圍接口模塊、GPRS模塊、GPS模塊、傳感器網關模塊、存儲模塊、藍牙模塊與液晶顯示模塊。
2 詳細設計
2.1 電源模塊設計
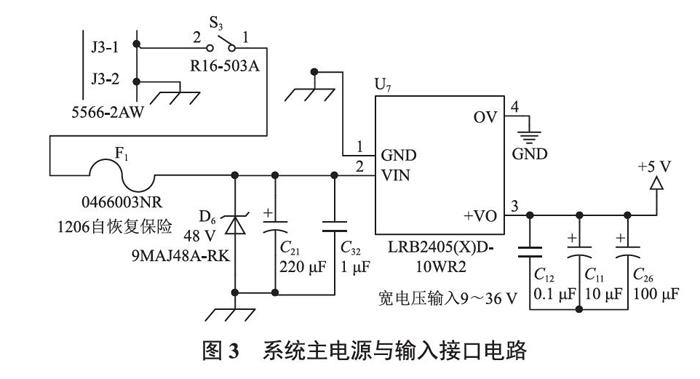
系統主電源與輸入接口電路如圖3所示。電源輸入通過一個50 V/2 A的自恢復保險絲F1與一個48 V瞬態電壓抑制二極管D6進行電源反接保護和過壓保護。電源模塊U7的輸入和輸出都接入了電解電容和無極性電容進行電源去耦濾波,該電源模塊在輸入9~36 V電壓時均可輸出穩定的+5 V電壓。
系統運行的3.3 V電源電路如圖4所示,輸入和輸出同樣接入特定電容進行濾波。
2.2 LCD模塊電源驅動與接口電路
(1)LCD驅動電源與背光電路
LCD驅動電源的作用是產生驅動LCD工作的電壓。LCD需要電源驅動的三個管腳分別為AVDD,VGH,VGL。其中,AVDD需要的典型供電電壓為+10.4 V;VGH需要的典型供電電壓為+16 V;VGL需要的典型供電電壓為-7 V。根據電源的需求特性,采用MP1541DJ即U2升壓,然后利用倍壓整流和反向串聯電路產生各一路正負電源,通過16 V和6.8 V的穩壓二極管得到所需電壓。
(2)背光二極管的電壓是否可調
LCD背光二極管的電源驅動主要通過改變電壓達到改變電流的目的,這里選用EUP2584,即U3。該芯片在輸入+5 V
電壓的情況下,端口+VLED+與+VLED-之間連接背光二極管,電壓在0~27 V范圍內可調。
背光驅動電路的XEINT10端口可用來控制背光芯片是否使能,也可通過輸入0電平關閉背光電源芯片。背光驅動電路通過XPWMTOUT1端口實現核心板對背光亮度的連續調節。
LCD驅動電源與背光電路如圖5所示。
2.3 GPRS模塊電路
GPRS模塊電路主要由GPRS電源電路和GPRS模塊接口電路組成。
(1)GPRS電源電路
GPRS電源電路使用降壓型DC/DC開關電源芯片MP2359,通過設置該芯片的輸出反饋分壓電阻的分壓值使輸出電壓變為+3.8 V。芯片的使能端通過GPRS_PWR端口控制。GPRS電源電路如圖6所示。
(2)GPRS模塊接口與外圍電路
GPRS模塊選用SIM900A,其外圍接口電路主要由模塊電源濾波電路、啟動電路、SIM卡接口電路、復位電路、LED信號指示電路和串口通信電路等組成。其中,電源濾波電路由于GPRS啟動電流較大,尤其在初始化時,系統中加入的220 μF+100 μF的電容無法提供啟動電流,因此需要加入一個330 μF的電容,總容量超過500 μF為宜。
模塊啟動電路中,通過拉低PWRKEY并保持至少1 s后釋放便可以開啟模塊。同理,通過拉低PWRKEY并保持至少1 s后釋放便可以關閉模塊。PWRKEY端口在模塊內部已上拉至3 V,所以集電極開路連接到該端口即可。系統啟動后,待核心板正常工作,并給GPRS_ON端口輸入一個高電平,系統才能有效工作。
GPRS模塊接口與外圍電路如圖7所示。
2.4 GPS模塊電路
定位模塊采用U-BLOX公司設計生產的NEO-6M模塊,其外圍接口電路如圖8所示。該模塊采用3.3 V電壓供電,電源輸入端經過3個濾波電容后可提供平穩的電壓以保證模塊正常、持久工作。此外,該模塊自帶高增益有源天線,采用串口通信輸出數據,其TTL電平兼容3.3 V/5 V系統。
3 系統測試
根據硬件設計繪制系統PCB板,焊接完畢后對各模塊逐步調試,以確保硬件電路的正確性。
系統硬件測試項目主要包括電源與各模塊接口及驅動電路的測試,焊接和測試順序按照如下測試步驟進行:
(1)測試主電源電路;
(2)測試3.3 V電源;
(3)測試核心板相關電路;
(4)測試核心板外圍其他接口電路;
(5)測試LCD電源和接口電路;
(6)測試GPRS電源和接口電路;
(7)測試GPS接口電路。
測試的主要工具包括可調穩壓電源、數字萬用表、示波器、串口調試工具等。依照上述順序對主要模塊進場測試,結果統計見表1所列。
4 結 語
本文基于智能傳感、車載定位、物聯網等技術,設計了一種基于無線傳感網絡的微環境監測終端系統,并對系統的主要硬件模塊進行了詳細設計和分析,通過焊接和調試,發現系統各模塊均正常工作,滿足了預期的功能要求和設計指標。
參考文獻
[1]白二龍.基于物聯網的食品冷鏈信息監測系統研究[D].杭州:浙江大學,2017.
[2]童世華.基于ZigBee技術的數字化車間環境監測無線控制終端系統的設計[J].機床與液壓,2017,45(22):176-178.
[3]嚴曉華,鄭國莘.基于物聯網技術報警及環境監測智能終端的設計[J].物聯網技術,2017,7(11):21-23.
[4]鄭龍,金光,鈕俊,等.基于無線傳感網絡與智能終端的環境監測系統[J].數據通信,2015(2):6-10.
[5]張新.基于LoRa技術的煤礦作業環境實時監測系統設計[J].自動化儀表,2019,40(3):69-73.
[6]王沁,田軍委,張鑫,等.車載式環境監測系統的設計[J].機械與電子,2018,36(5):42-44.
[7]魏阿勇,凌志浩,葉西寧.基于STM32的移動多終端環境監測系統[J].自動化儀表,2015,36(3):40-44.
[8]姚有峰,趙江東,郝詩平.基于單片機技術的環境狀態監測系統的設計[J].測控技術,2012(1):105-108.
[9]任玲芝,湯俊,李巖巖.基于ZigBee的實驗室環境狀態實時監測系統設計[J].濱州學院學報,2018(4):73-77.
[10]劉堅.無線環境監測網絡網關節點和數據終端的設計[D].上海:上海交通大學,2009.
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
