分布式飛機機電綜合系統半實物驗證環境設計
2020-05-09 09:56:17苗棟肖剛余海田蓓
物聯網技術 2020年4期
苗棟 肖剛 余海 田蓓
摘 要:文中針對現代飛機的分布式機電綜合系統的要求,提出分布式飛機機電綜合系統地面半實物仿真驗證環境。以某型飛機分布式機電綜合管理系統數字仿真及半實物硬件在環測試要求為牽引,明確分布式機電綜合系統從數字驗證到半實物驗證的方法和過程。搭建分布式機電綜合系統半實物驗證環境,并對該環境整體能力進行驗證測試,試驗結果表明了涉及方法、驗證系統是正確、合理的。
關鍵詞:分布式系統;飛機機電綜合;半實物仿真驗證;試驗驗證;數字驗證;在環測試
中圖分類號:TP391文獻標識碼:A文章編號:2095-1302(2020)04-00-04
0 引 言
飛機機載設備是指為了完成飛行任務、特定任務以及為保證飛行員與成員安全、舒適而裝配在飛機上的、有獨立功能裝置的總稱,主要由飛控系統、航電系統和機電系統(飛管系統)三大部分組成。機載設備作為飛機重要組成部分,正在發揮越來越重要的作用。其中,機載機電系統是保證飛機正常飛行以及飛機個功能安全運行的安全關鍵系統[1]。
隨著信息技術、網絡技術和計算機技術的飛速發展,機電系統向綜合化、模塊化、智能化方向快速發展,不再以單個機電系統或機電設備作為控制、管理及監視的對象,而是以全機整個機載機電系統作為控制、管理及監視的對象,提高了綜合化的程度。從現代飛機機電綜合管理系統發展情況可以看出,機電綜合管理系統的體系結構經歷了從部分機電系統綜合、機電系統信息綜合、分布式機電綜合管理(采集、控制及解算)等體系結構的發展。新型分布式系統構型體系與傳統的機電系統構型體系對系統半實物在環驗證提出了新的要求及挑戰。
對于新型的分布式機電系統架構,單個設備與單個系統不再是一對一的關系,傳統單機單系統仿真激勵方式將無法滿足分布式機電系統仿真驗證要求。現有試驗能力既無力支持綜合化機電系統的評估,也無法對綜合化機電系統架構方案、整體綜合功能及控制在環性能進行驗證。同時,在以往的機電綜合管理系統設計過程中,機載代碼的開發驗證往往要等到機載硬件開發完成之后才能進行,而大系統聯合調試更是要等到所有成品交付后才能進行,造成各環節脫節并且相互制約,無法開展并行設計[2]。
自20世紀末,國外為適應先進飛機發展需要,加快了機電系統綜合化發展步伐。美國通過20世紀80年代初的UMS計劃,20世紀90年代的J/IST演示驗證計劃的實施,推動綜合設計與驗證技術逐步走向成熟,促進控制、功能、能量、物理綜合化水平持續提高,帶動機電系統整體性能、能源利用率、功重比和可靠性、維修性、測試性等不斷提升。目前,美國正在實施的INVENT計劃,將推進機電系統綜合化向更高水平發展。在新型航空裝備快速發展牽引下,隨著機電領域一大批關鍵技術的逐步突破,國外飛機機電系統技術加速向綜合化、多電化、智能化和高功重比等方向發展。
近十年來,歐美及俄羅斯均在機電系統領域開展了多項綜合仿真驗證項目的研究,并且支持了多個型號及預研項目,如INVENT,Clean sky等研究計劃均是基于數學仿真和半實物仿真支持的。
研究資料表明,虛擬綜合驗證、仿真試飛、航空故障診斷、預測與健康管理技術已經成為國內外科學技術研究中的一個熱點問題,受到了廣泛的關注。
我國機電各分系統領域已廣泛開展數字仿真,并取得了較多的成果,但綜合仿真尚處于起步階段;初步開展了建模技術方面的研究和系統仿真平臺和建模工具的研究,雖然取得了一些成果,但是研究成果尚不能滿足飛機機電系統研制的需要。目前,國內在機電系統綜合設計能力和試驗驗證能力方面與國外均有明顯差距,主要體現在以下方面。
(1)現有的機電系統數字化設計條件主要是單點工具,無法支撐從需求、功能、邏輯到物理整個研制過程,不能滿足綜合化機電系統的研制需求。
(2)仍舊以單獨子系統級的半實物仿真、地面試驗為主要手段,多子系統綜合試驗能力較弱,尚未形成適應系統級試驗的全數字仿真能力。現有試驗能力僅可以支撐綜合化機電系統的評估,但是仍無法對綜合化機電系統整體性能進行驗證。
(3)綜合化機電系統涉及到大量新仿真技術工具的應用。目前國內沒有成熟的完整數字仿真設計、驗證及評估的軟件工具體系和架構。
綜上,本文主要針對分布式機電系統綜合設計確認、試驗驗證的需求,開展了基于分布式仿真架構的半物理驗證平臺技術研究,并提升了分布式機電系統綜合設計和試驗驗證能力。一方面,能夠支撐綜合化機電系統從需求、功能、邏輯到物理整個研制過程;另一方面,能夠在各個階段對綜合化機電系統從頂層架構、方案、系統功能及性能等進行全面完整的驗證。
1 分布式機電綜合系統架構
1.1 機電綜合管理系統
機電綜合管理系統是指為飛行提供能源、動力、保障等功能的機電系統,從物理、接口、功能和能量等方面實現總體整合化,實現原來各自機電子系統所有功能的一個綜合化整體,這些子系統也稱為公共設備子系統[3]。機電綜合管理系統包括供配電系統、液壓系統、燃油系統、環控系統、起落架裝置系統、照明系統等。綜合后的系統能使子系統在重量、架構、安全性、能效比、系統數據信息共享等方面實現最優化[4]。由于機電系統的物理接口特性相似,機電系統設備工作環境特性一致。物理接口特性反映了物理仿真、混合仿真的接口要求,包括輸入/輸出信號類型、數量、種類、驅動功率等;機電設備工作環境特性是指機電系統運行所需的操作指令輸入、飛行包線變化、該系統運行對其他系統的依賴性等,是對機電系統運行環境的模擬;仿真模型類型特性是指模型類型, 即是連續系統模型,還是離散事件系統模型,以及模型動態過程的時問常數等[5]。所以機電系統仿真模型類型特性具有相似性、可以與其他系統的交聯仿真功能進行一體化設計建模。
1.2 分布式機電綜合系統
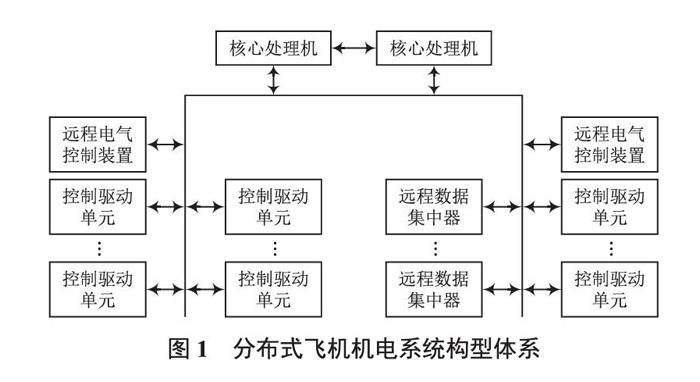
分布式機電綜合管理系統構型體系采用2臺核心處理機、若干臺數據采集器、若干臺控制驅動單元配合2臺遠程電氣控制裝置的構型進行各機電系統綜合管理,系統構型如圖1所示。
分布式飛機機電綜合系統構型體系的特點為,采用區域分布的數據采集器完成各區域的傳感器管理及數據采集工作,并將數據上傳至核心處理機進行統一解算,核心處理機向分布式控制驅動單元發出控制指令完成用電設備控制功能。系統內設置的遠程電氣控制裝置能夠按區域直接完成某些具有高實時性要求的系統閉環控制功能。分布式機電系統構型體系特點概括為以下幾點:
(1)分布式的數據采集器完成數據采集、冗余及上報;
(2)機電核心處理機完成各子系統的信息綜合,系統控制及管理,故障監控及診斷;
(3)遠程智能配電裝置接收核心機發出的控制指令完成各種控制和配電功能;
(4)分布式閉環控制系統的時效性及控制能力主要受系統內參與控制的各設備響應速度及系統總線網絡延遲的影響;
(5)分布式遠程設備功能單一,重量輕、體積小、功耗小,同時可以通過余度設計保證系統的高安全性需求,是未來飛機機電系統發展的趨勢。
2 分布式機電系統仿真模塊劃分
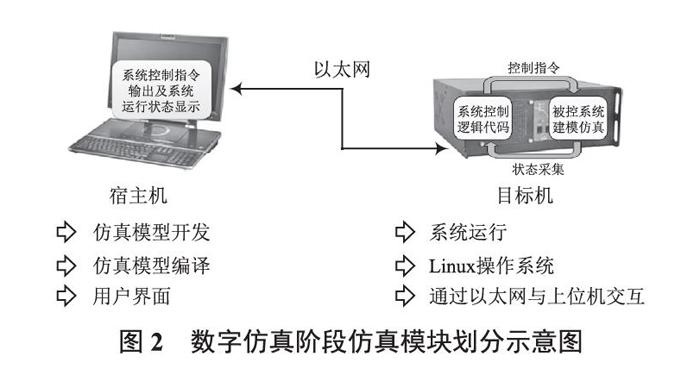
在分布式機電控制管理系統數字仿真向半實物仿真擴展時可分為兩個階段:系統數字仿真階段和半實物仿真階段。
系統數字仿真階段系統仿真模塊劃分及實現如圖2所示。在數字仿真階段即可開展系統控制邏輯開發工作,并將系統控制器模型及被控系統物理效應模型進行統一編譯并實時運行,通過宿主機可以得到真實的系統運行時間與邏輯的響應關系。
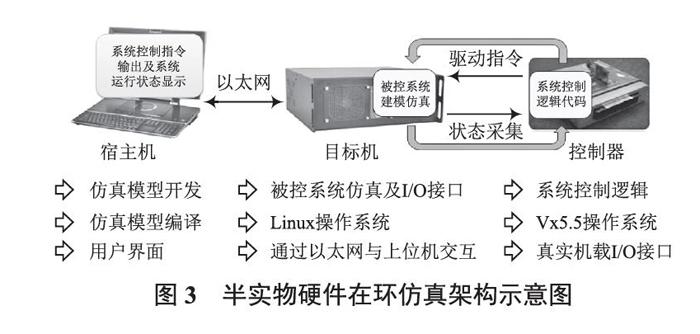
從數字仿真階段過渡到半實物仿真階段時,通過系統控制代碼遷移技術,將系統控制邏輯遷移至真實機載控制器上,實時仿真目標機進行系統物理效應模型實時仿真,并通過真實物理接口與機載設備連接。完成半實物HIL硬件在環測試與驗證工作。圖3為半實物仿真階段系統架構示意圖。
3 分布式機電系統仿真驗證
3.1 分布式仿真驗證平臺
按照圖2、圖3構建開放共享的實時網絡、常用數據總線、機電綜合仿真總控臺及信息交聯設備。該平臺可以用于分布式機電系統的實時仿真平臺,可以實現從模型仿真、快速控制原型、硬件在環試驗直到系統級半實物交聯試驗。
當傳統以太網協議同步情況變差時,會出現碰撞和沖突現象,嚴重影響測試系統中關鍵性任務流量的確定性和實時性,因此,保證分布式設備間的時鐘同步[6]是分布式架構的半物理仿真驗證環境需要重點解決的問題。分布式機電系統仿真驗證平臺采用新型實時以太網協議完成半物理驗證環境平臺構成。
3.2 試驗平臺組成與搭建
試驗件包括以下設備、部件及仿真模型:機電控制管理系統半物理試驗原理樣件、仿真激勵和試驗系統仿真模型。機電管理半實物試驗平臺構成如圖4所示。
分布式機電控制管理系統實時半物理HIL仿真試驗平臺分步實施,逐次迭代,依次進行數字仿真、半物理仿真交聯測試,其在系統設計各階段工作如下。
(1)系統方案及需求分析階段。收集和整理系統設計需求,分析系統關鍵技術,建立系統數字仿真模型,對關鍵技術進行風險評估。
(2)詳細初步設計階段。系統方案確定后,對系統的詳細初步設計進行建模、仿真,對系統功能、接口等進行仿真驗證。
(3)詳細設計階段。系統設計進入詳細設計階段后,建立系統詳細設計實時仿真模型,對系統性能進行硬件不在環的性能實時仿真驗證。
(4)子系統測試階段。系統機載設備交付后,在系統詳細設計實時仿真模型中接入機載設備物理部件,進行子系統級半物理仿真驗證。
4 半實物仿真平臺功能測試
半實物仿真平臺功能測試的原理為:在機電系統數字仿真環境,開發針對分布式機電系統測試的功能分配模型,并選取某典型模擬量通道接口。對該接口進行連續變化的波形仿真動態輸出,在數字仿真模式下,觀察并記錄接口波形輸出。其具體流程如圖5所示,編譯并實時化分布式機電系統測試的功能分配模型,在半實物仿真平臺上位機進行周期運行,并通過實時以太網將典型模擬量通道接口控制指令發布至半實物仿真下位機,由半實物仿真下位機模擬量接口卡完成該信號的物理信號觸發、調理及激勵。并通過示波器對下位機該模擬量接口進行信號采集及記錄。根據數字仿真的波形及示波器采集物理信號波形的比較可以得出半實物仿真平臺的整體功能滿足情況,以及半實物仿真平臺模擬的整體失真率。
本例中采用兩種數字仿真激勵波形對半實物仿真平臺進行激勵測試。數字仿真激勵波形1為正弦波信號,并采用0~10 V電壓信號接口完成模擬量信號輸出。數字仿真波形及示波器采集波形如圖6、圖7所示。
數字仿真激勵波形2為正弦波信號,并疊加固定頻率脈寬信號進行輸出故障模擬,當脈寬信號為1時,模擬量接口數據改變為0,并同樣采用0~10 V電壓信號接口完成模擬量信號輸出。數字仿真波形及示波器采集波形如圖8和圖9所示。
5 結 語
目前分布式機電綜合管理系統需要控制機電系統主要為液壓、燃油、環控及起落架收放系統,被控系統運動周期以秒為單位進行控制,分布式機電綜合管理系統的RIU采集周期為200 ms。故分布式仿真架構的半物理驗證環境的模型解算周期,實時以太網通信周期以及下位機驅動輸出周期均為50 ms。增加集成周期長度能夠有效降低同步帶寬占用比,但是也會帶來更大的時鐘偏差,對時鐘同步的性能造成影
響[7]。而半物理驗證環境的最大延遲誤差可基本滿足分布式機電綜合管理系統功能測試的要求。但是對于部分機電系統,如供電系統、剎車系統等,半物理驗證環境的最大延遲誤差不能滿足系統在環測試的要求,后續應持續開展基于實時操作系統的半物理驗證環境開發及構建,從模型實時解算、網絡通信速率及下位機驅動同步開展相關工作,以逐步提升該平臺的整體實時性仿真及測試能力。
參考文獻
[1]郭鵬,李亞暉,孫允明.機載機電綜合管理系統架構建模與仿真方法[J].電光與控制,2017(12):100-105.
[2]溫婧.基于RT-LAB的機電綜合管理系統半物理仿真研究[J].機電一體化,2016(5):13-16.
[3]吳麗媛,王偉.直升機機電綜合管理系統通用仿真設備設計[J].直升機技術,2018(2):52-54.
[4]黃暉,張磊,邵惠明.一種機電綜合控制技術仿真平臺原理方案
[J].科技信息,2012(29):43-44.
[5]李楊,王占林.機載機電設備綜合控制管理系統仿真平臺設計[J].航空科學技術,1998(1):22-25.
[6]張義.基于RT-LAB的航空發動機控制系統實時仿真技術研究[D].南京:南京航空航天大學,2013.
[7]王夢迪,王彤,何鋒,等.時間觸發以太網時鐘同步的仿真與性能驗證[J].電光與控制,2014(12):61-65.
[8] YUN X D,ZHAO Y,ZHU W P. Real-time simulation and research on photovoltaic power system based on RT-LAB[J]. The open fuels &energy science journal,2015(8):183-188.
[9]朱偉,李紀云,江慧,等.基于分布式內存數據的數據同步設計與實現[J].現代電子技術,2014,37(2):77-79.
[10]司冀,堯建平.飛機舵面地面試驗加載作動筒多余附加力分析[J].物聯網技術,2016,6(10):102-104.
作者簡介:苗 棟(1984—)男,陜西白水人,主要從事機電控制綜合管理系統試驗、測試與驗證工作。
肖 剛(1974—)男,江蘇蘇州人,上海交通大學航空航天學院教授、博士生導師,主要從事航空電子綜合與系統仿真研究工作。
余 海(1976—)男,陜西西安人,航空工業一飛院機電系統設計研究所高級工程師,主要從事供電系統設計與仿真工作。
田 蓓(1996—)女,陜西西安人,上海交通大學航空航天學院控制科學與工程專業博士研究生,研究方向為復雜產品建模與系統仿真。
