石英微機電陀螺的頻率干擾特性研究
2020-05-10 04:28:24林日樂謝佳維蔣昭興冉龍明李文蘊朱振忠
壓電與聲光 2020年2期
關鍵詞:模態
林日樂,謝佳維,王 偉,董 勇,蔣昭興,冉龍明,李文蘊,羅 華,朱振忠
(1.中國電子科技集團公司第二十六研究所,重慶400060;2.空裝駐重慶地區軍事代表室,重慶400060)
0 引言
石英微機電陀螺是一種微型哥氏(Coriolis)振動陀螺,該類陀螺具有精度高、溫度性能好、可靠性高和適合低成本批量生產等特點,可廣泛應用在穩定、控制、制導、導航等領域。石英微機電陀螺工作時敏感芯片處于諧振狀態,敏感芯片結構具有多種模態,前9階模態覆蓋頻率為3~21 kHz。敏感芯片的部分模態易受外部振動影響而導致敏感芯片產生共振,使陀螺產生零位偏移誤差,是影響陀螺綜合精度及環境適應性的關鍵因素[1]。
1 石英微機電陀螺工作原理
圖1為采用雙端音叉結構的敏感芯片結構示意圖。圖2為石英微機電陀螺的工作原理。由圖1,2可看出,驅動音叉被激勵并以其固有頻率諧振,在輸入軸向有角速度輸入ωi時,由于哥氏力的作用,使檢測音叉做受迫振動,振動幅度正比于驅動音叉運動的速度和輸入角速度。利用石英晶體的壓電效應,將振動信號轉換成電信號,并通過放大、相敏解調和濾波得到一個正比于輸入角速度的直流電壓輸出[2-3]。
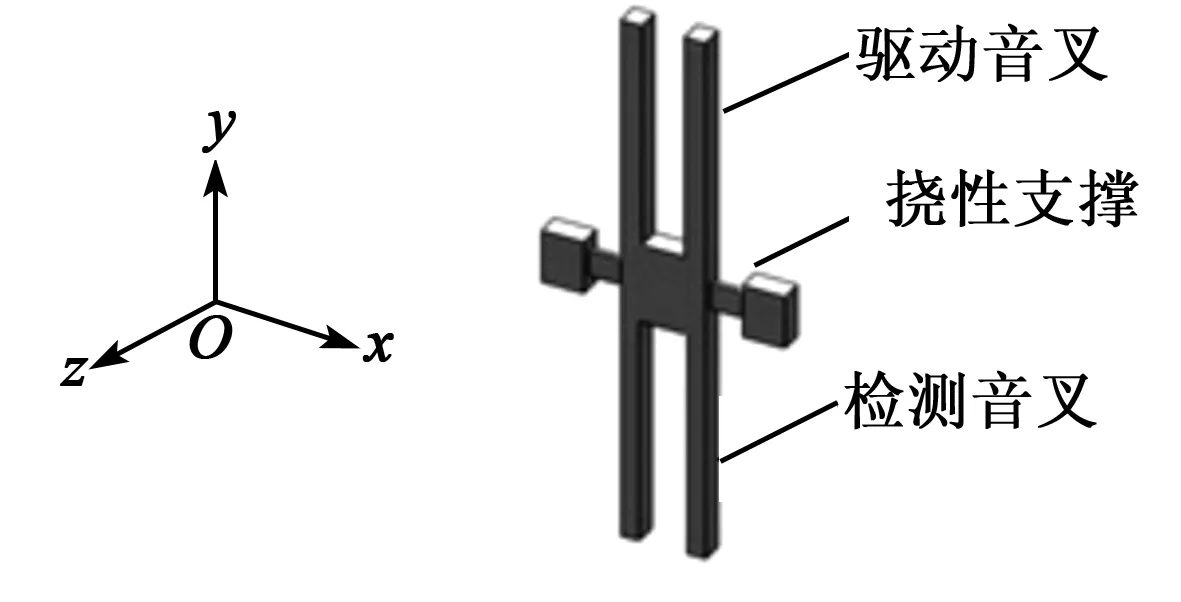
圖1 雙端音叉敏感芯片結構示意圖
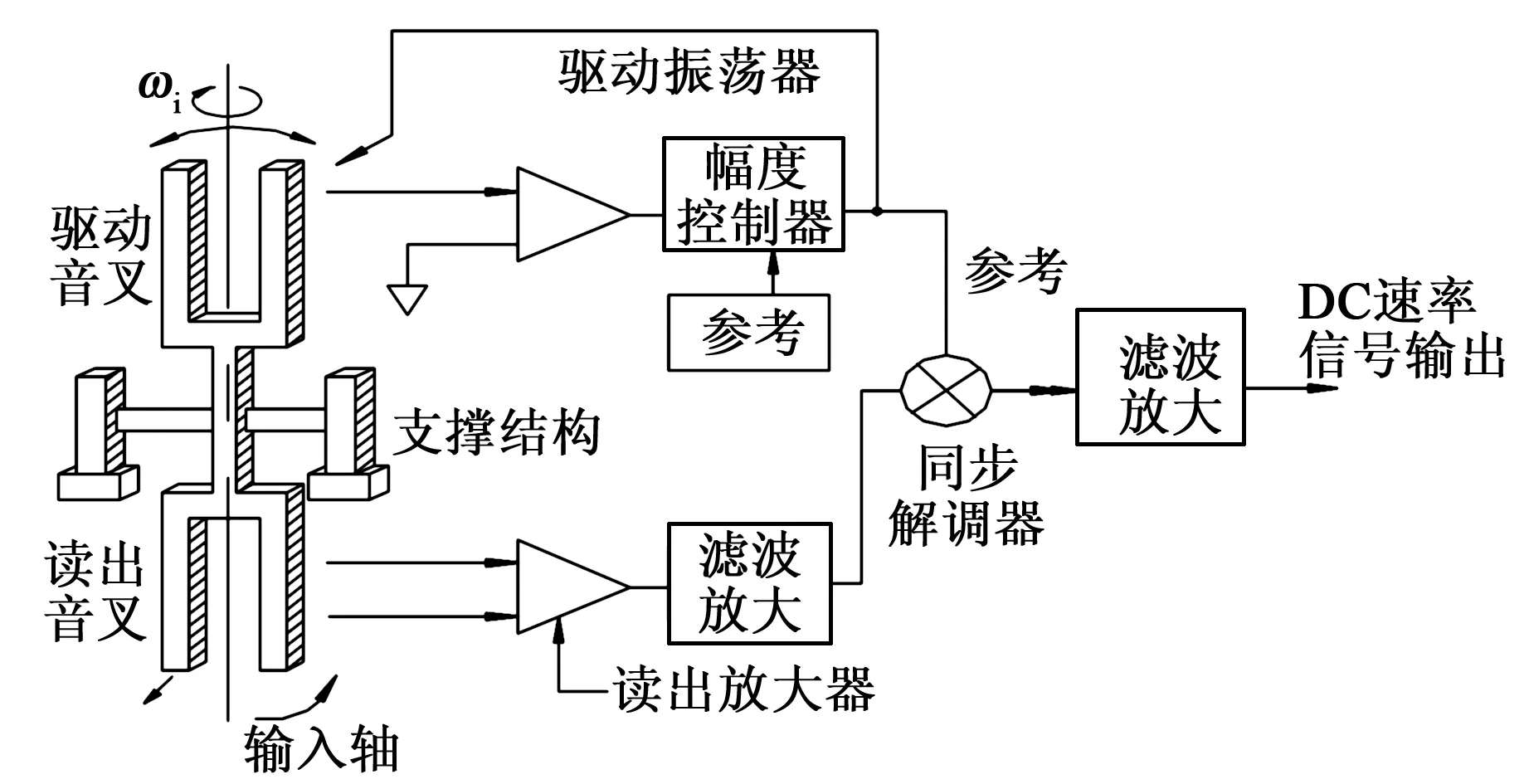
圖2 石英微機電陀螺工作原理圖
2 頻率特性分析
石英微機電陀螺雙端音叉敏感芯片具有復雜的模態振型,芯片的結構形式和結構參數決定不同的諧振模態。利用有限元分析法進行結構仿真分析,該類型結構的前9階模態振型如圖3所示,其中第七、八階分別是驅動模態和檢測模態。驅動模態是驅動音叉在xy平面內諧振,檢測模態是驅動音叉與檢測音叉在yz平面內諧振。前9階模態覆蓋頻率為3~21 kHz。當外部工作環境的頻率與敏感芯片部分模態頻率重合時會引起共振,導致陀螺零位偏移誤差。除驅動模態頻率和檢測模態頻率外,其他階模態(特別是與檢測模態振型相似的模態)影響較大[4-7]。
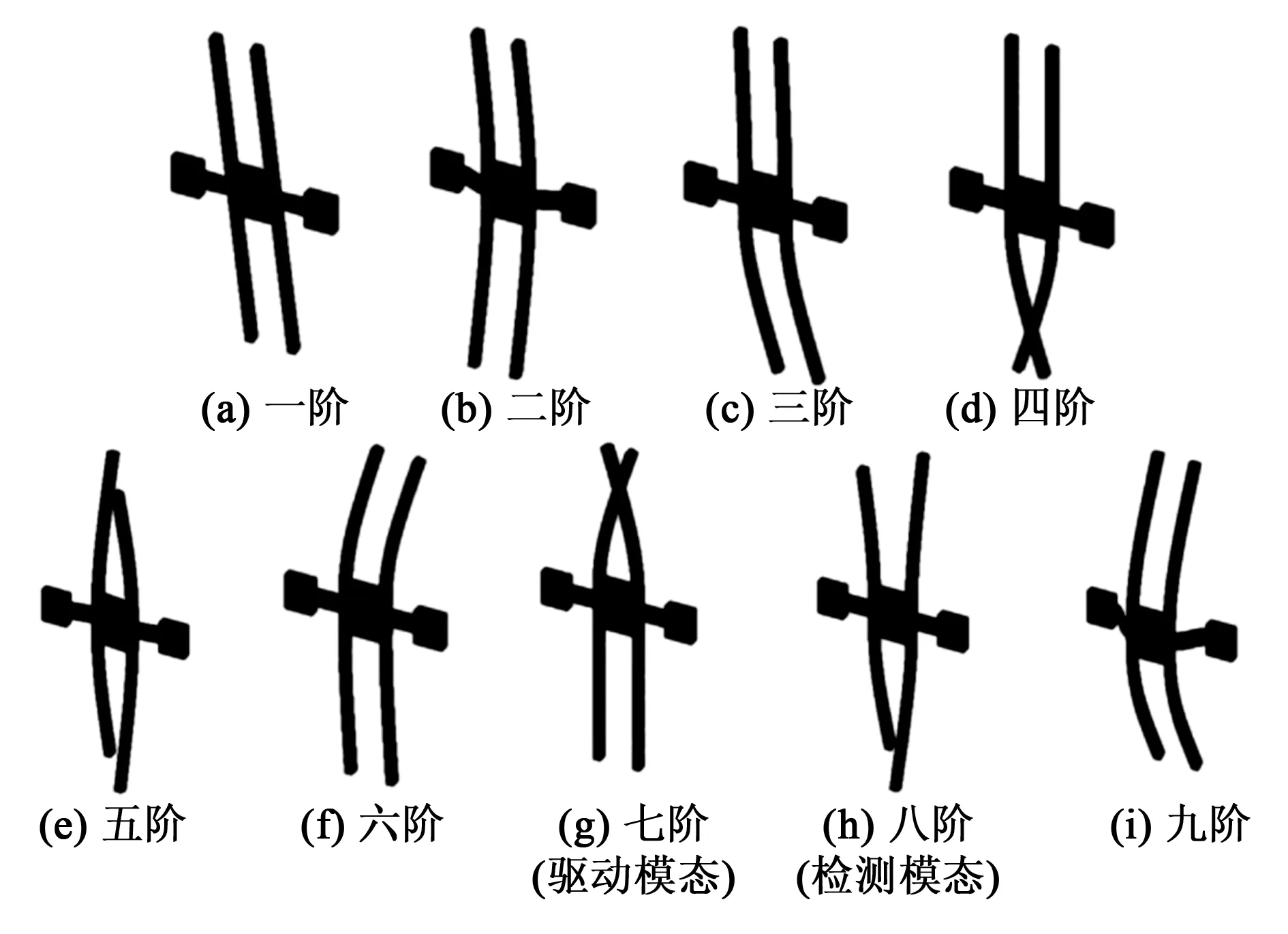
圖3 雙端音叉敏感芯片前9階模態振型示意圖
對敏感芯片進行3~21 kHz的掃頻分析(見圖4),在其各階模態頻率處會引起共振,導致檢測音叉產生位移。雙端音叉結構的石英陀螺敏感芯片,其檢測音叉上檢測電極的設計對音叉x、z方向的位移敏感,音叉在這2個方向產生位移,會通過石英晶體的壓電效應轉換為電信號,如果該信號不能抵消或在信號相敏解調過程中抑制,最終將形成陀螺零位誤差信號。
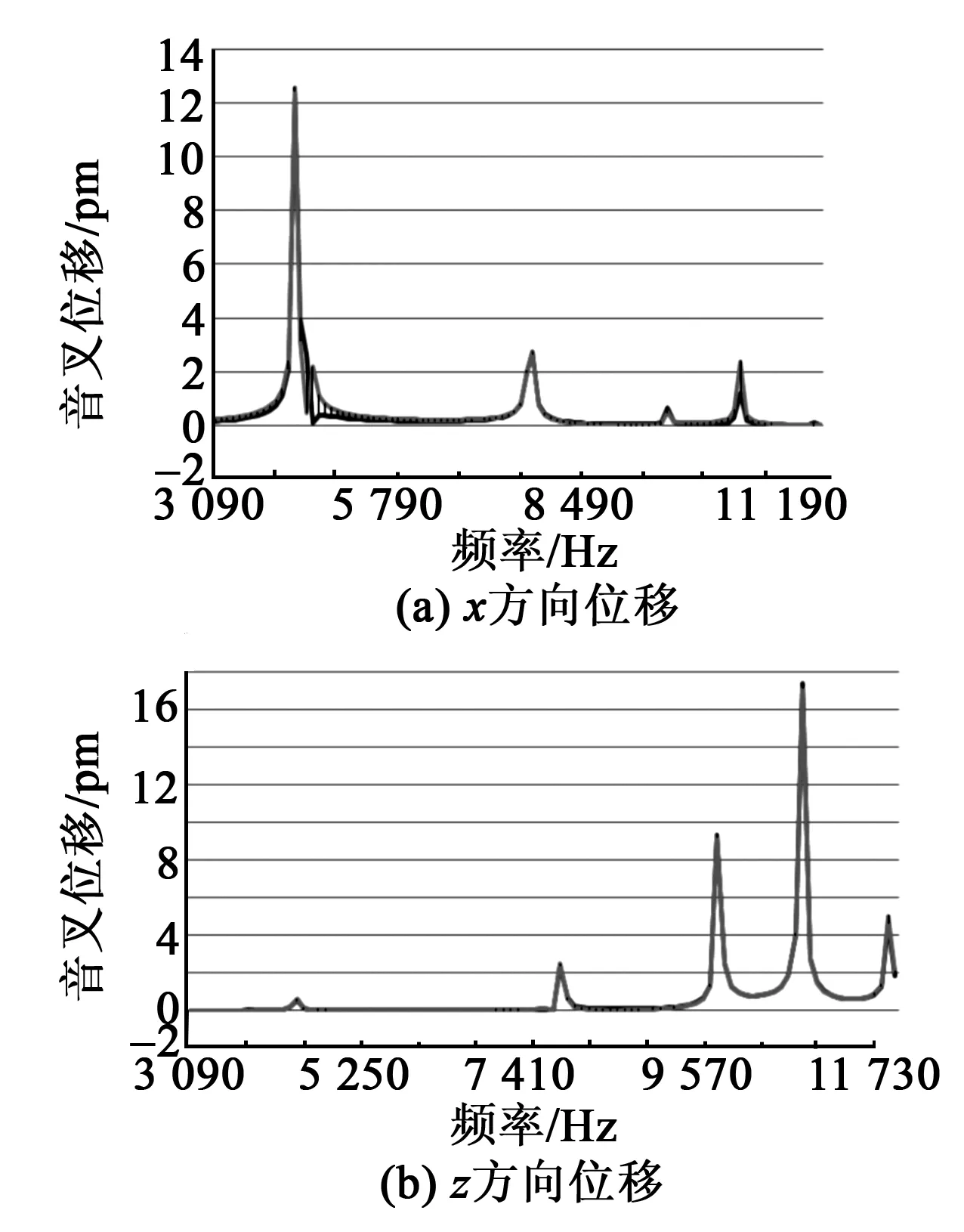
圖4 檢測音叉掃頻仿真分析響應曲線
在敏感芯片結構設計時,針對特定工作環境的干擾頻率,優化芯片中易引起干擾的模態頻率,進行錯頻設計,這能有效避免芯片在該模態頻率共振導致的零位偏移誤差。針對雙端音叉敏感芯片結構,設計了2組不同參數,其前9階模態頻率如表1所示 。同時,由圖3可看出,其二、三階模態的振型主要表現為檢測音叉的同相或反相運動,這兩階模態一旦在工作環境中引起共振,易引起陀螺零位偏移誤差。如工作環境有4.4 kHz左右(或其高次諧波)的頻率干擾源,將引起芯片的二階模態共振,導致零位誤差。為避免該情況,根據這兩階模態振型特點,優化芯片的結構參數,改變這兩階模態的頻率,同時保持芯片驅動和檢測模態頻率基本不變,即對芯片中易引起干擾的模態頻率進行錯頻設計,避免工作環境頻率對芯片的干擾,提升陀螺的振動環境適應性。優化芯片結構參數后,參數組2的二、三階模態頻率變化了約4%,可有效錯開干擾頻率。
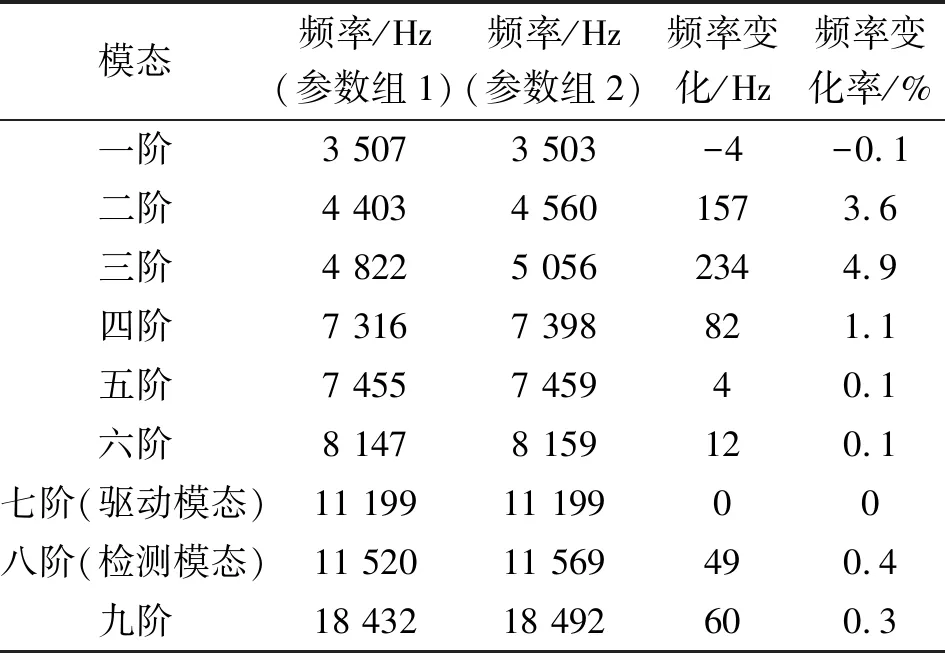
表1 雙端音叉敏感芯片前9階模態頻率(仿真分析)
3 實驗
3組不同結構參數的敏感芯片,其前9階模態頻率的實測值如表2所示。不同的結構及工藝參數改變了敏感芯片的各階模態頻率,特別是二、三階模態頻率,通過調節,頻率發生明顯變化,變化率可達6%。芯片部分模態錯頻后,避免了與外部環境特定頻率共振引起的零位偏移誤差。如圖5所示,敏感芯片的模態頻率與外部環境頻率產生共振,零位偏移誤差達0.5 (°)/s,進行錯頻后,在該頻率點零位偏移誤差被有效抑制,零位偏移誤差減小到0.03 (°)/s左右,有效提高了陀螺的振動環境適應性。
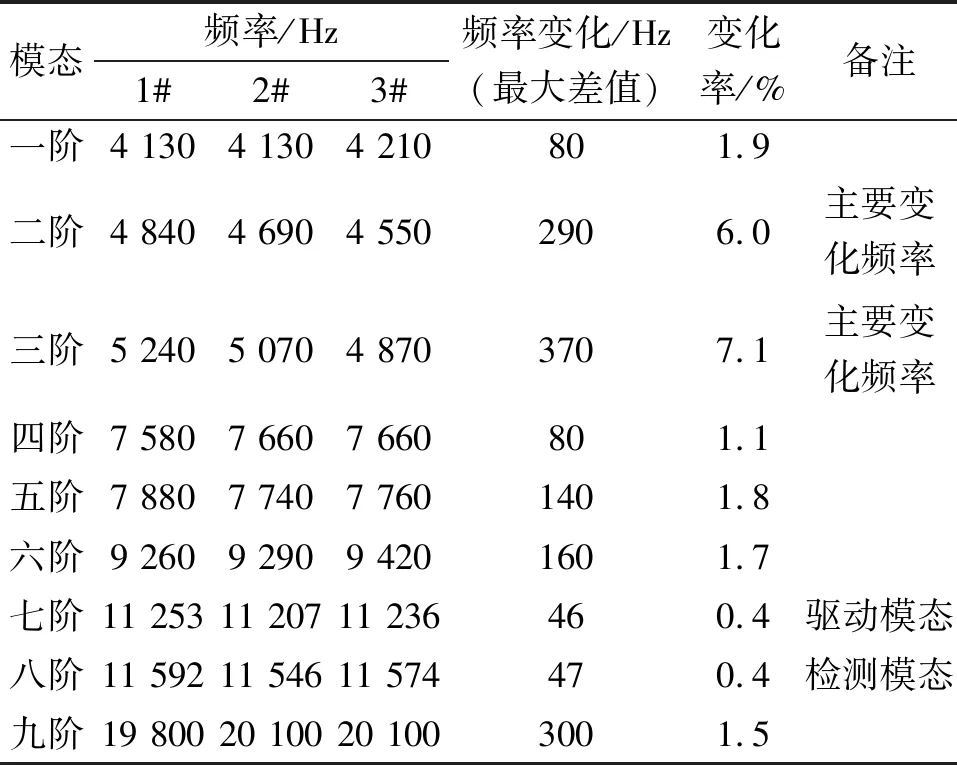
表2 不同結構參數的雙端音叉敏感芯片前9階模態頻率實測值
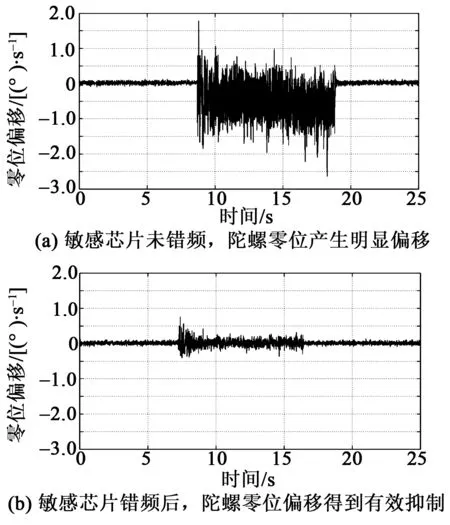
圖5 不同陀螺敏感芯片結構在外部頻率干擾源作用下的零位輸出曲線
4 結束語
石英微機電陀螺是一種微型振動陀螺,工作時敏感芯片處于諧振狀態,敏感芯片具有多種模態,部分模態易受外部振動影響而產生共振,導致陀螺零位偏移誤差。通過敏感芯片結構參數的優化,進行模態頻率的錯頻設計,將易受影響的模態頻率避開外部環境的特定干擾頻率,可抑制共振引起的陀螺零位偏移誤差,有效提高了陀螺的振動環境適應性。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
