斐索干涉儀中壓電陶瓷的非線性校正
2020-05-10 04:46:36盧慶杰
壓電與聲光 2020年2期
王 芳,盧慶杰,韓 森,2
(1.上海理工大學 光電信息與計算機工程學院,上海 200093;2.蘇州慧利儀器有限責任公司,江蘇 蘇州 215123)
0 引言
目前,高精密元件和高性能光學系統(tǒng)在科學研究和生產工程領域發(fā)揮了重要作用,而先進的檢測技術和高端的檢測儀器對光學元件和光學系統(tǒng)的制造及使用尤為重要。光學干涉測量技術是現(xiàn)代最精密的測試技術之一,它能快速、準確地完成對光學元件面形與系統(tǒng)的檢測。相移干涉測量技術的基本概念是通過采集一組相移干涉圖,精確地提取干涉圖的相位[1-4]。壓電陶瓷(PZT)致動器相移法通常被使用,即利用PZT在電壓的驅動下產生位移形變的特性,使用其作為相移產生裝置。但由于PZT具有嚴重的遲滯非線性,直接導致相鄰幀干涉圖之間的相移量為非線性,從而提取的相位將攜帶誤差,影響著干涉儀的的測量結果。針對PZT的遲滯非線性問題,國內外學者已大量研究了遲滯模型(目前較成熟的模型主要有Preisach模型、Duhem模型及Maxwell模型等[5-11])及控制方法(主要有基于遲滯模型的前饋控制法、不基于遲滯模型的PID反饋控制法及前饋控制與反饋控制相結合的混合控制方法等[12-13])。
針對斐索干涉儀相移器的遲滯非線性特性,本文設計了一種基于PZT傳遞函數(shù)的前饋開環(huán)校正法的控制系統(tǒng)來校正PZT的遲滯非線性,該方法不存在反饋回路,簡單有效。整個控制系統(tǒng)包括電壓驅動系統(tǒng)和位移采集系統(tǒng)。PZT傳遞函數(shù)是通過PZT的輸入功能函數(shù)和輸出功能函數(shù)的關系來描述PZT的固有屬性,然后通過結合PZT的固有屬性及PZT的理想輸出位移可得到PZT理想的輸入電壓,最終完成PZT的非線性校正。
1 系統(tǒng)設計
1.1 相移誤差產生的相位誤差
根據(jù)雙光束干涉理論,干涉場中的光強分布[14]可表示為
I(x,y)=Idc(x,y)+Iac(x,y)cos[φ(x,y)+δn]
(n=-1,0,1,2,3)
(1)
式中:I(x,y)為測得的每幀干涉圖像的每個像素點的光強;Idc(x,y)為光強的偏移量;Iac(x,y)為調制光強峰谷值的一半;φ(x,y)為參考波前與被測波前的相位差;δn為相移量。
測量時可得到每幀干涉圖像每個像素點的光強。其中φ(x,y),Idc(x,y),Iac(x,y)均是未知的,因此,至少需要3個干涉圖才能決定在不同圖像間的相位變化φ(x,y)。本文采用五步相移算法及相移量為π/2的方法來獲取φ(x,y),且
(2)
式中I1~I5為每步相移后測得的光強強度。
根據(jù)δn與PZT位移量ΔL之間的關系,則式(1)可表示為
I(x,y)=Idc(x,y)+Iac(x,y)·
(3)
由式(3)可知,PZT的非線性位移將導致非等步長的相移改變量,進而產生相位誤差。
相位誤差σφ可表示為
(A+B+C)
(4)
式中:λ=632.8 nm為激光干涉儀的波長;ΔL1,ΔL2,ΔL3,ΔL4,ΔL5為PZT每步的位移量。
(5)

(6)

(7)
根據(jù)以上分析,相位誤差可通過移相誤差求得,進而可求得被測表面形貌的高度(h)誤差及峰谷(PV)與起伏高度均方根誤差(RMS),分別表示為
(8)
ΔPV=Δhmax-Δhmin
(9)
(10)
1.2 實驗系統(tǒng)
由于相位誤差引起高度(h)誤差,而相位誤差是由PZT移相誤差引起的,因此有必要提出一種控制系統(tǒng)和方法來校正PZT的遲滯非線性。實驗研究對象PZT作為斐索(Fizeau)干涉儀相移器的關鍵部件,推動參考鏡移動,進而產生光程差。圖1為斐索(Fizeau)型干涉儀的實驗平臺。
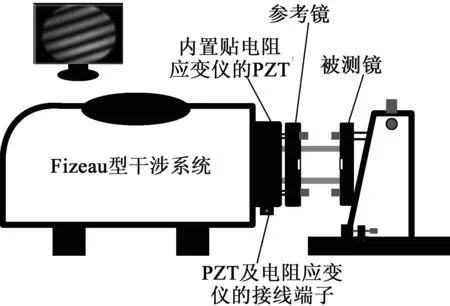
圖1 斐索型干涉儀實驗平臺
1.2.1 實驗裝置
圖2為實驗控制系統(tǒng)框圖。實驗系統(tǒng)采用矩形壓電陶瓷疊層致動器作為驅動源。該PZT內部集成了電阻應變儀,最大輸入電壓150 V,行程10 μm,電阻應變儀的固有阻值為1 kΩ。數(shù)據(jù)采集設備使用NI公司數(shù)據(jù)采集卡(PCIe-6321)和連接器(SCB-68A),主要作用是與LabVIEW系統(tǒng)結合產生PZT的驅動電壓信號及與位移傳感器、LabVIEW系統(tǒng)結合獲取PZT的輸出位移。電壓放大器采用壓電控制器(XE-650.OA),放大倍率為12.5,主要作用是放大PZT的驅動電壓信號。位移傳感器是一個單臂惠斯通橋式電路,其中內置于PZT的電阻應變儀為其中的1個臂,其余3個臂的阻值均為1 kΩ,電阻精度均為1%。位移傳感器采用5 V直流電壓供電,采用MATLAB軟件平臺設計前饋開環(huán)校正算法程序,對采集到的位移數(shù)據(jù)進行處理,最終求出PZT理想的驅動電壓值。
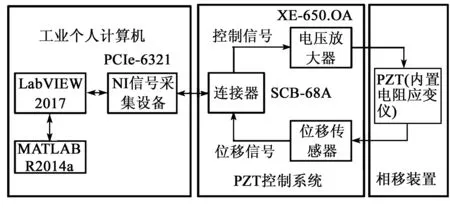
圖2 PZT控制系統(tǒng)
1.2.2 PZT位移非線性校正控制算法
為了補償PZT非線性特性產生的相位誤差,提出了一種前饋開環(huán)控制模型校正PZT的非線性特性,開環(huán)控制思想?yún)⒖嘉墨I[12],即將PZT的傳遞函數(shù)模型串聯(lián)在PZT之前,使PZT輸入與輸出呈線性關系。
輸入電壓Vin(t)是已知的PZT驅動電壓,根據(jù)干涉儀的測量要求,通過計算機、NI數(shù)據(jù)采集設備、LabVIEW系統(tǒng)及電壓放大器產生,Vin(t)可表示為
Vin(t)=kt
(11)
式中k為常數(shù),根據(jù)干涉儀的測量要求設置k值。
當PZT被驅動后,可得其輸出位移Xout(t),對Xout(t)信號進行多項式擬合處理,則
(12)
式中:p∈(0,P),P≥1;t∈(tm,tm+1),m=0,1,2,…;ap,P,tm,tm+1均為常數(shù)。
如果PZT的功能參數(shù)未知,則Vin(t)與Xout(t)間的關系為
Xout(t)=o(Vin(t))
(13)
式中ο為函數(shù)關系的表示符號。
同時理想的輸出位移可表示為
Xideal(t)=at+b
(14)
式中a,b是常數(shù),且a,b根據(jù)干涉儀測量要求設定其數(shù)值。
針對同一個PZT,其新的理想輸入電壓Videal(t)與Xideal(t)間的關系可表示為
Xideal(t)=o(Videal(t))
(15)
根據(jù)式(13)~(15)可得:
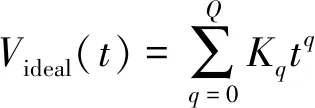
(16)
式中Kq,Q是常數(shù),且Q>1。
1.3 實驗結果
1.3.1 線性校正PZT的位移
實際中,針對干涉儀利用五步相移算法對光學樣品進行表面三維形貌測量時,只使用到三角波驅動電壓的正向電壓驅動PZT推動參考鏡產生相移,所以,此實驗研究對象針對三角波驅動電壓的正向電壓,并對產生的位移進行線性校正。
在1.2節(jié)實驗系統(tǒng)的基礎上,系統(tǒng)產生幅值為100 V,頻率為0.5 Hz的周期三角波信號作為PZT的驅動電壓。系統(tǒng)的采樣速率為0.5 kSPS。在系統(tǒng)驅動PZT時,同步采集PZT的位移數(shù)據(jù)并存儲。取出PZT半個周期的位移增長數(shù)據(jù),利用MATLAB軟件平臺以及1.2.2節(jié)介紹的開環(huán)控制算法,可得到PZT產生理想位移所需理想驅動電壓。然后將MATLAB計算出的驅動電壓值用來重新驅動PZT,系統(tǒng)再次采集PZT的位移數(shù)據(jù),校正流程如圖3所示。圖4為PZT位移校正前、后的驅動電壓值。圖5為PZT校正前、后的位移值。
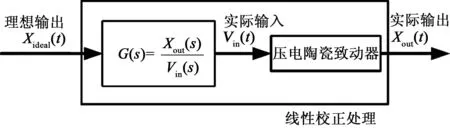
圖3 非線性校正控制算法框圖

圖4 PZT校正前、后的驅動電壓
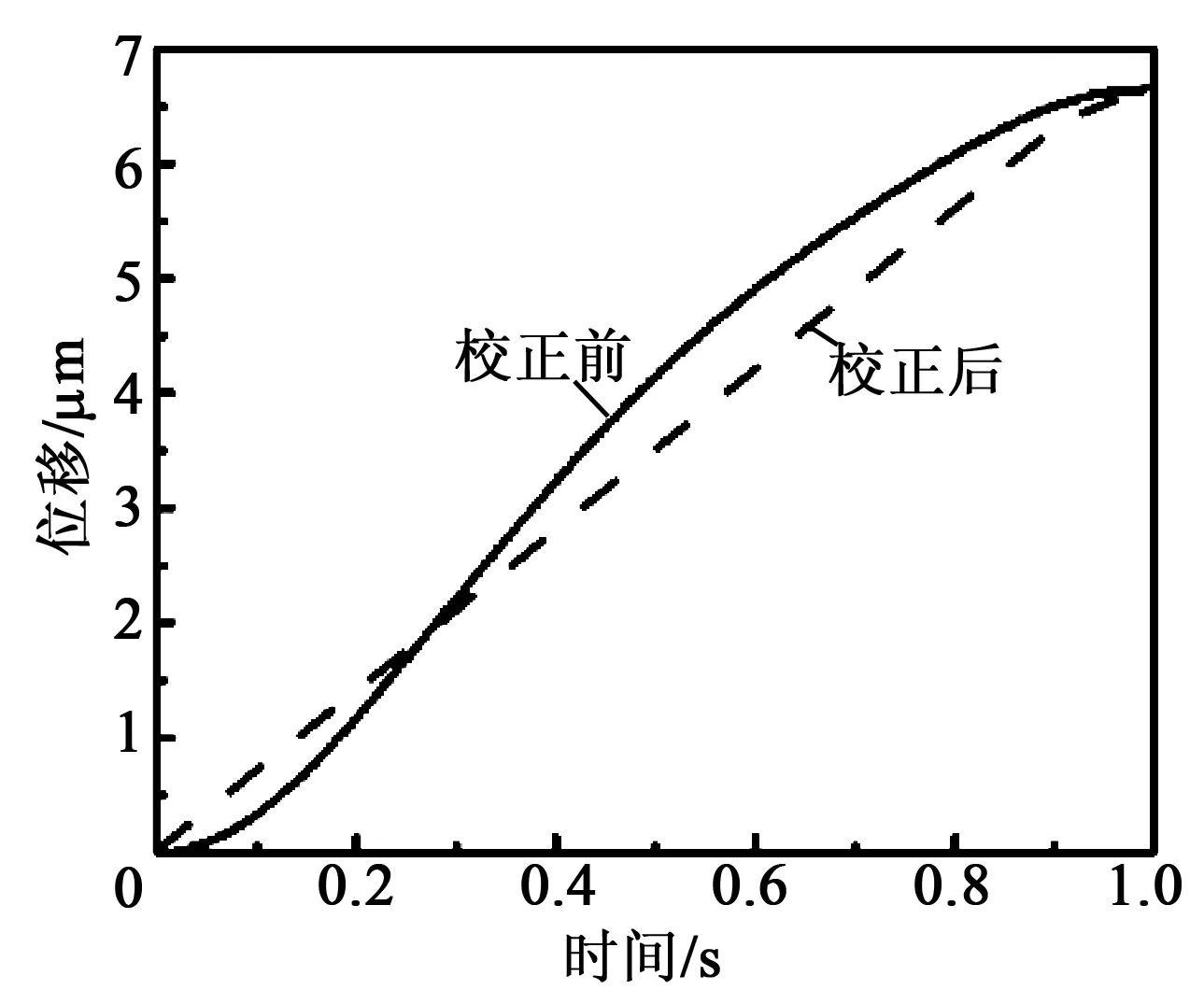
圖5 PZT校正前、后的位移
圖6為PZT校正前、后的驅動電壓差及位移差。由圖可看出,PZT校正前、后輸出與輸入函數(shù)呈反函數(shù)關系。
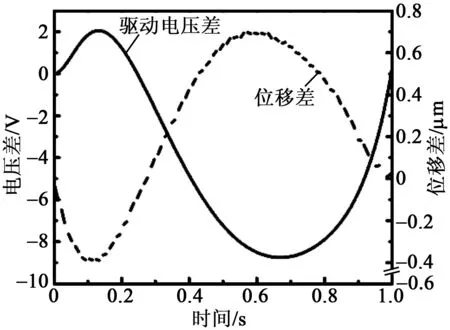
圖6 PZT校正前、后的驅動電壓差與位移差
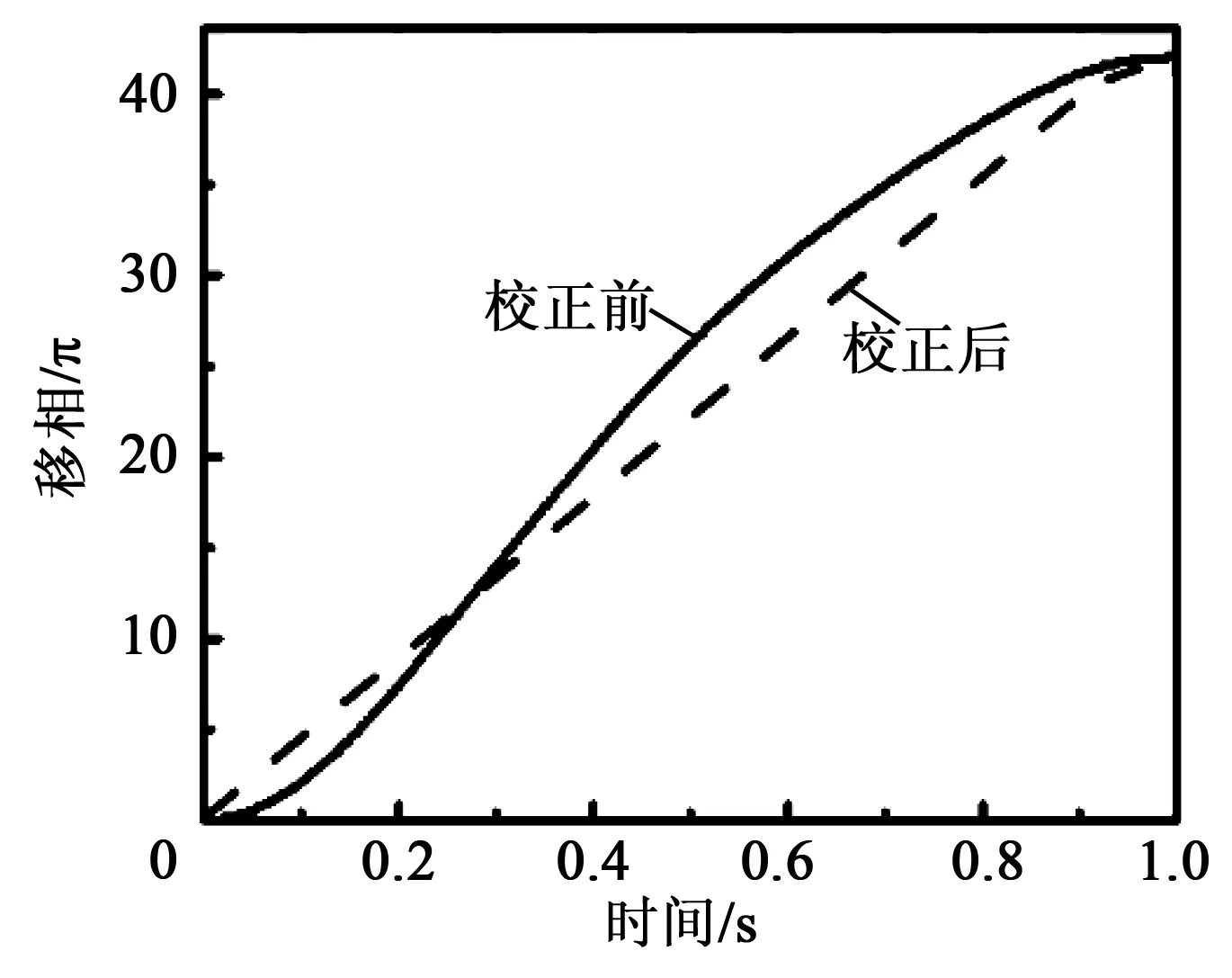
圖7 PZT校正前、后相移器的移相
1.3.2 相位誤差與高度誤差的模擬
圖8為PZT校正前、后系統(tǒng)的相位誤差。圖9為PZT校正前、后系統(tǒng)的高度誤差。校正前,MATLAB軟件編程產生32個相位值,以及5個相移誤差值,系統(tǒng)將會產生最大相位誤差為9.85×10-6rad,高度誤差為4.96×10-4nm。校正后,PZT的位移軌跡為線性,在相同時間間隔內可實現(xiàn)每步的相移量固定為π/2,相位誤差及高度誤差可被改善。
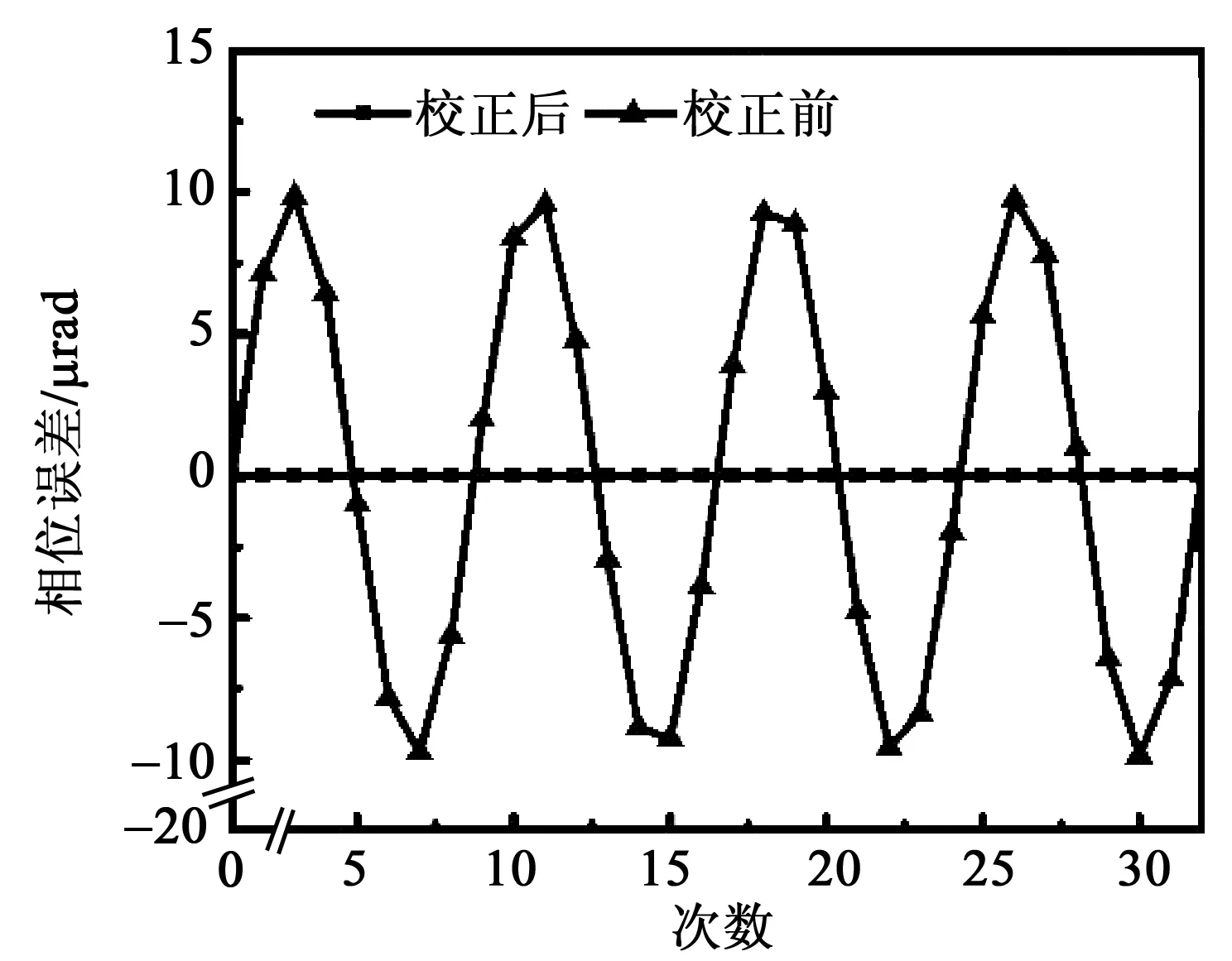
圖8 PZT校正前、后系統(tǒng)的相位誤差
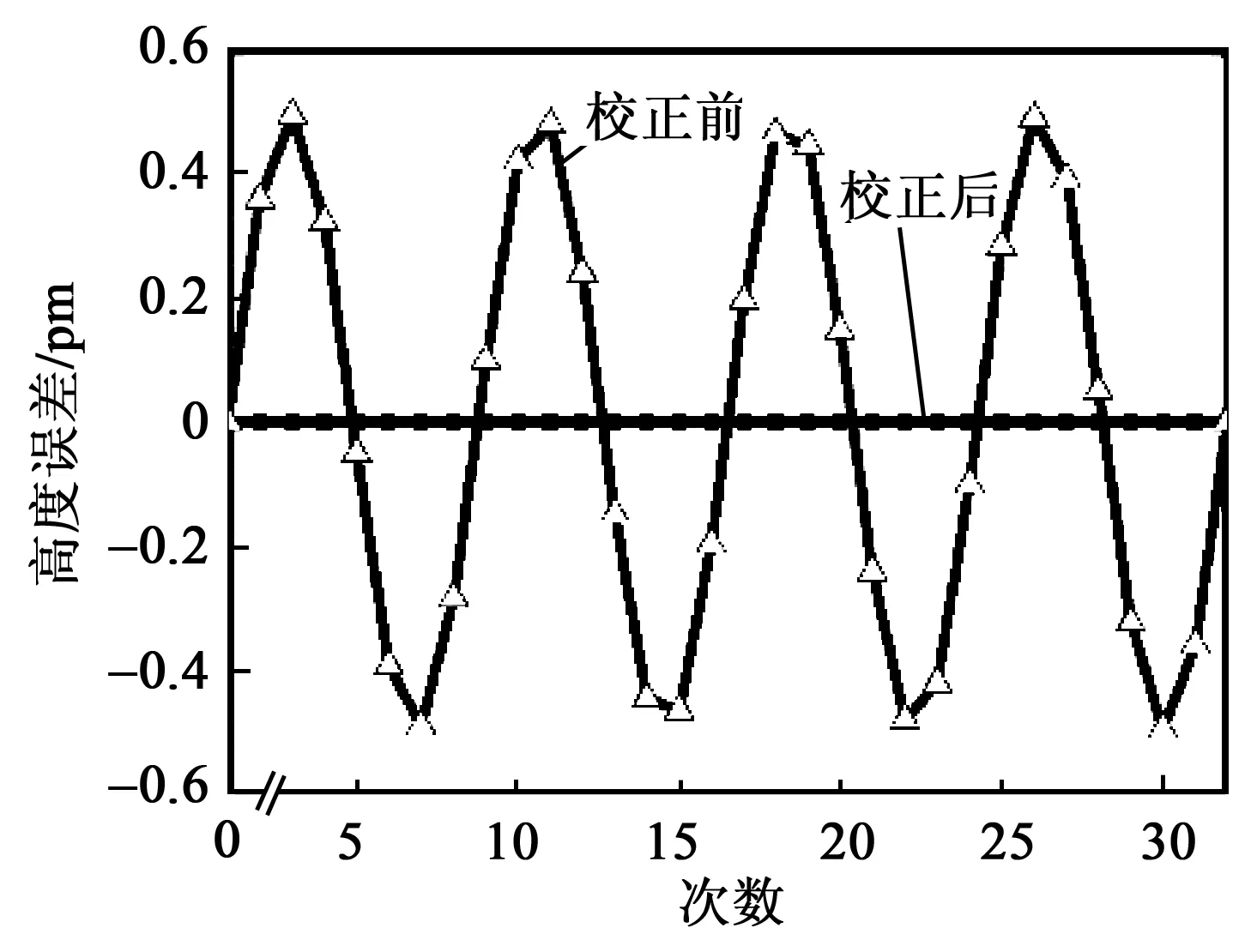
圖9 PZT校正前、后系統(tǒng)的高度誤差
2 結束語
本文結合斐索型干涉儀的實驗平臺,搭建了PZT相移器的控制系統(tǒng),包括電壓驅動系統(tǒng)與位移采集系統(tǒng)。然后結合前饋開環(huán)控制算法,可有效完成PZT的遲滯非線性校正。實驗中,控制系統(tǒng)的采樣頻率為0.5 kSPS,輸入電壓頻率為0.5 Hz。校正前、后位移差小于10%。校正后,改善了移相誤差,同時改善了相位誤差和高度誤差,從而有效提高了干涉儀的測量精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
