基于實時位置和速度的自動化軌道式龍門起重機(jī)防撞系統(tǒng)設(shè)計*
2020-05-14 06:12:42譚興福蔣進(jìn)軍劉春明
港口裝卸 2020年2期
關(guān)鍵詞:作業(yè)
譚興福 蔣進(jìn)軍 劉春明
上海振華重工(集團(tuán))股份有限公司
1 引言
近年來,國內(nèi)越來越多碼頭在建或計劃建設(shè)自動化碼頭或自動化堆場。由于軌道式龍門起重機(jī)(以下簡稱軌道吊)運行平穩(wěn)、定位準(zhǔn)、作業(yè)效率高等優(yōu)點,堆場主要以軌道吊來實現(xiàn)自動化作業(yè)。自動化軌道吊主要分為懸臂式軌道吊和非懸臂式軌道吊2種,懸臂式軌道吊在堆場各個貝位都可以進(jìn)行進(jìn)出箱作業(yè),非懸臂式軌道吊的堆場只能在堆場的兩端進(jìn)行進(jìn)出箱作業(yè)。這種結(jié)構(gòu)的堆場要求大車運行速度快,現(xiàn)有軌道吊最大運行速度已超過4 m/s,因此軌道吊之間的防撞保護(hù)特別重要。
傳統(tǒng)碼頭的防撞主要依靠司機(jī)眼睛觀察、機(jī)械層防撞、電控層防撞來實現(xiàn)。機(jī)械層防撞通過安裝在大車端部的緩沖器實現(xiàn),如果2臺軌道吊相撞,緩沖器會吸收軌道吊的部分動能,減少沖擊。電控層防撞是在軌道吊上安裝雷達(dá)、激光、超聲波甚至視覺[1]等測距傳感器,并在傳感器內(nèi)設(shè)定減速距離x1和停止距離x2,傳感器實時檢測前方狀況。當(dāng)傳感器檢測到前方x1范圍內(nèi)有障礙物時,發(fā)出1個減速信號并反饋給PLC,PLC收到傳感器減速信號后控制軌道吊低速(額定速度的10%)運行。現(xiàn)有的電控層防撞起作用后,只能低速運行,如果應(yīng)用在自動化碼頭上,會嚴(yán)重影響效率,為了提高效率并保證安全性,需要從多個層面進(jìn)行防撞設(shè)計。
2 自動化軌道吊防撞設(shè)計
自動化堆場由多個層級的系統(tǒng)共同實現(xiàn),主要有碼頭操作系統(tǒng)(TOS)、堆場管理系統(tǒng)、軌道吊自動控制系統(tǒng)和設(shè)備層等組成。自動化堆場運行時,堆場管理系統(tǒng)從TOS獲取作業(yè)任務(wù),并將任務(wù)下發(fā)至軌道吊自動控制系統(tǒng),軌道吊自動控制系統(tǒng)控制設(shè)備運行至作業(yè)位置,并進(jìn)行自動抓放箱操作。與傳統(tǒng)堆場相比,自動化堆場增加了軌道吊自動控制系統(tǒng)和堆場管理系統(tǒng),減少了軌道吊司機(jī)及調(diào)度人員。為了保證軌道吊安全運行,這2個系統(tǒng)都需要增加防撞功能。

圖3 軌道吊A內(nèi)程序流程圖
2.1 堆場管理系統(tǒng)防撞分析
堆場管理系統(tǒng)的防撞是指堆場管理系統(tǒng)在給軌道吊自動控制系統(tǒng)發(fā)送任務(wù)時,防止出現(xiàn)軌道吊交叉作業(yè)或一臺軌道吊跨越另外一臺軌道吊的情況。如果TOS發(fā)送交叉作業(yè)或跨越作業(yè)等任務(wù),堆場管理系統(tǒng)應(yīng)通過合理分配任務(wù)或驅(qū)趕另一臺軌道吊等操作,防止軌道吊發(fā)生碰撞。如圖1所示,軌道吊A、B都在36貝位左側(cè),如果堆場管理系統(tǒng)直接給軌道吊A發(fā)送去36貝位作業(yè)的指令,就可能會導(dǎo)致軌道吊A和B相撞,因此堆場管理系統(tǒng)會先將軌道吊B驅(qū)趕到46貝位,然后讓軌道吊A去36貝位作業(yè),保證作業(yè)安全。
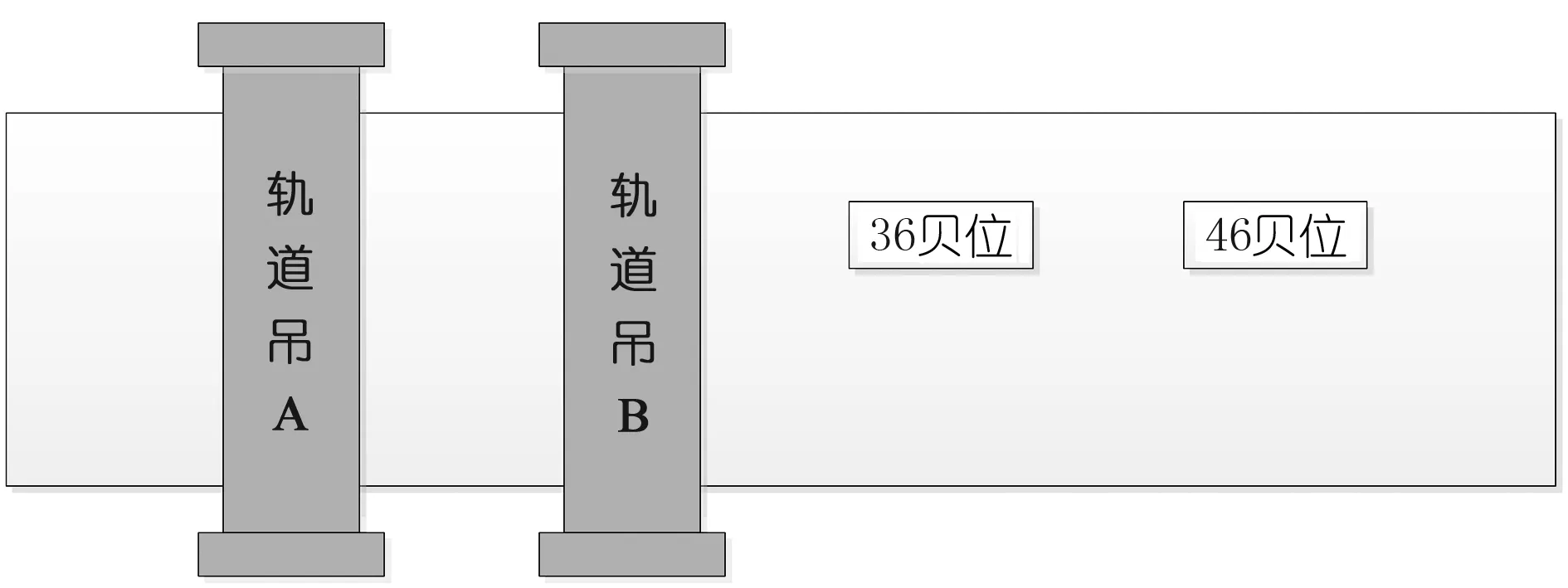
圖1 調(diào)度層防撞圖
2.2 2臺軌道吊位置交互的實現(xiàn)
自動控制系統(tǒng)的防撞是一種基于自身大車位置、相鄰大車位置和速度的防撞。為了能夠讓軌道吊A、B實時獲取對方的位置和速度,添加了一個中轉(zhuǎn)PLC(見圖2),軌道吊A、B將自己的大車位置和速度發(fā)送給中轉(zhuǎn)PLC,中轉(zhuǎn)PLC將A的大車位置和速度發(fā)送給軌道吊B,將B的大車位置和速度發(fā)送給軌道吊A,這樣軌道吊A、B的自動控制系統(tǒng)就可以獲取對方的位置及速度。
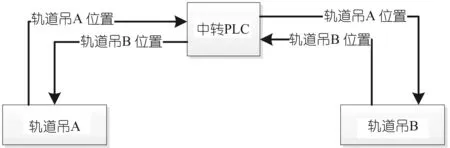
圖2 軌道吊大車位置速度流向圖
2.3 基于位置的自動控制系統(tǒng)防撞的實現(xiàn)
當(dāng)一臺軌道吊收到另外一臺軌道吊大車位置之后,為了實現(xiàn)安全可靠且對作業(yè)效率影響小的防撞,需要對防撞系統(tǒng)進(jìn)行合理的設(shè)計。將防撞的工況分為1臺軌道吊向靜止軌道吊運行、2臺軌道吊相向運行、2臺軌道吊同向運行3種情況,分別研究這3種情況防撞的實現(xiàn)。
2.3.1 一臺軌道吊向靜止軌道吊運行時防撞
假設(shè)軌道吊B靜止不動,軌道吊A向B運行,并且軌道吊A的大車位置比軌道吊B大。如果軌道吊A停止時,2臺軌道吊之間距離大于等于W,則軌道吊A的運行速度不能大于VA_safe,VA_safe計算公式如下:
(1)
式中,VA_safe表示軌道吊A經(jīng)防撞限制后輸出給驅(qū)動器的速度給定;Vset為自動控制系統(tǒng)或手柄的速度給定;sA為軌道吊A的實時大車位置;sB為軌道吊B的實時大車位置;a為大車驅(qū)動機(jī)構(gòu)的減速度,一般同一堆場內(nèi)的2臺軌道吊減速度相同。
由于VA_safe是根據(jù)勻減速運動公式計算得出的,因此軌道吊A停下來時與軌道吊B的距離應(yīng)該為W。具體控制流程見圖3。
2.3.2 2臺軌道吊相向運行防撞實現(xiàn)
前提條件同上,當(dāng)2臺軌道吊相向運行時,由于另外一臺軌道吊在運行,因此不能直接使用另外一臺機(jī)的大車位置,要將另外一臺軌道吊大車的速度考慮進(jìn)去。因此為了保證2臺軌道吊相向運行時停止距離大于等于W,軌道吊A的速度給定應(yīng)小于等于VA_safe,VA_safe計算公式如下:
(2)
(3)
軌道吊B的速度給定應(yīng)小于等于VB_safe,VB_safe計算公式如下:
(4)
(5)
式中,VA_safe、VB_safe表示軌道吊A、B經(jīng)防撞限制后輸出給驅(qū)動器的速度給定;sA、vA為軌道吊A的實時大車位置和速度;sB、vB為軌道吊B的實時大車位置和速度;SA和SB為軌道吊A、B做勻減速運動停下來時的位置。
以軌道吊A為例,在軌道吊A的PLC內(nèi),防撞流程見圖4。
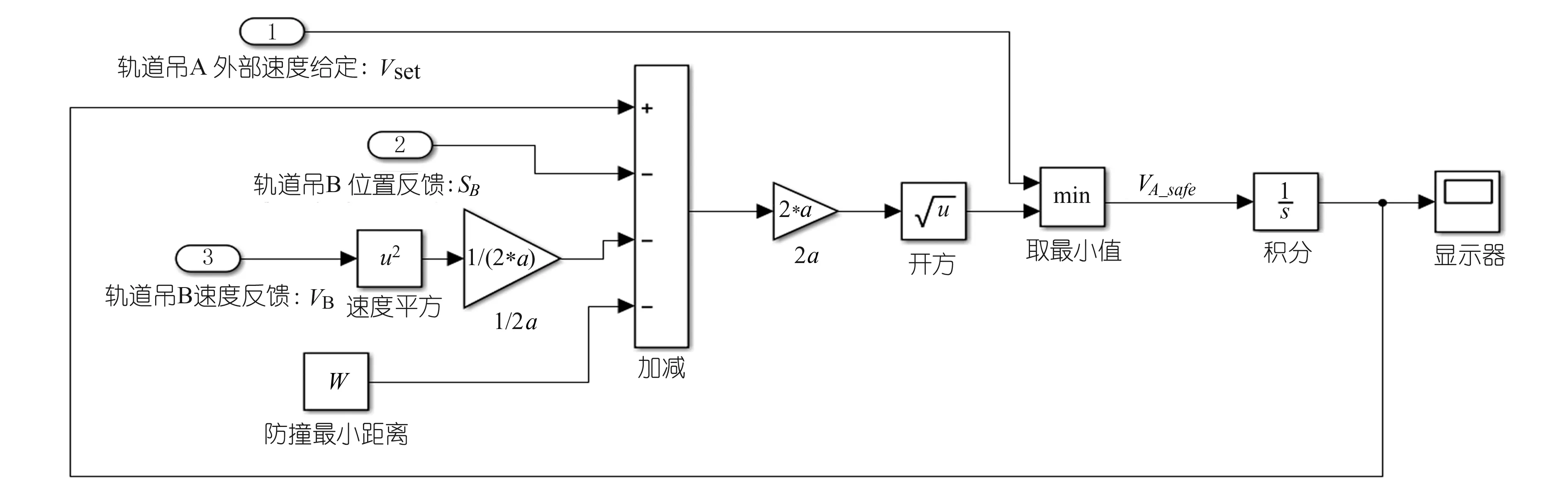
圖4 軌道吊A內(nèi)程序流程圖
2.3.3 2臺軌道吊同向運行防撞實現(xiàn)
設(shè)軌道吊A、B往同一個方向運行,假定堆場里面只有2臺機(jī),由于B的運行方向沒有軌道吊,以堆場的邊界對軌道吊B速度進(jìn)行限制。因此軌道吊B的速度限制為:
(6)
式中,Smin為軌道吊B運行到堆場最端部時的大車位置。
對于軌道吊A,要保證其停下來時與B的距離在W,根據(jù)勻減速直線運動的公式可有:
(7)
(8)
但是考慮到當(dāng)軌道吊B發(fā)生緊急停車事件時,會通過制動器報閘減速,此時其減速度一般大于a。如果軌道吊A的限制速度還是按照式(7)、(8)來確定就可能導(dǎo)致追尾。因此當(dāng)軌道吊A、B同向運行時,應(yīng)加大式(8)中a的數(shù)值,現(xiàn)取a為無窮大,即SB=sB。因此式(7)可修改為:
(9)
3 防撞的優(yōu)化
3.1 自動控制系統(tǒng)防撞的優(yōu)化
在實際應(yīng)用中發(fā)現(xiàn),2臺軌道吊停下來的距離比W小0.1~0.2 cm。自動化堆場存在2臺大車緩沖器相距不足1 m作業(yè)的工況,要求大車防撞的停止距離非常精確。經(jīng)過分析,由于軌道吊A、B的大車位置和速度交換要經(jīng)過多次網(wǎng)絡(luò)匯聚和光電轉(zhuǎn)換,同時PLC中程序處理也需要一定時間,因此存在較大延時。
為了測試鏈路中的延時,在軌道吊A的PLC中產(chǎn)生一個固定周期的脈沖,發(fā)送給軌道吊B,軌道吊B收到該脈沖后回傳給軌道吊A,在軌道吊A的PLC上對比產(chǎn)生的脈沖和收到的脈沖之間的時間間隔,即可大體估算出數(shù)據(jù)傳輸和程序處理導(dǎo)致的延時。經(jīng)測試,軌道吊A產(chǎn)生脈沖與收到脈沖之間相差160 ms,因此鏈路延時τ為80 ms左右。
由于延時系統(tǒng)的傳遞函數(shù)e-τs比較難以分析,因此對其進(jìn)行傅里葉展開:
(10)
當(dāng)延時時間比較小時,可忽略高階項。因此e-τs可簡化為:
(11)
為了減小或消除延時對系統(tǒng)的影響,需要對系統(tǒng)進(jìn)行校正。零極點對消在控制系統(tǒng)中應(yīng)用廣泛而成熟,因此采用零極點對消方法對位置環(huán)節(jié)進(jìn)行校正。在傳遞函數(shù)的分子項乘以1+τs進(jìn)行校正,從而消除系統(tǒng)延時產(chǎn)生的影響。
3.2 防撞傳感器應(yīng)用的優(yōu)化
以廈門遠(yuǎn)海自動化堆場為例,該堆場軌道吊大車的最大速度為4 m/s,減速時間為12 s,軌道吊上都裝有防撞傳感器。當(dāng)2臺軌道吊相向運行時,從全速減速到停止,2臺軌道吊的滑行距離為48 m。因此軌道吊防撞傳感器減速距離x1必須要大于W+48 m。當(dāng)兩臺軌道吊相距W+48 m,其中一臺軌道吊收到要往另外一臺軌道吊方向移動40 m的作業(yè)任務(wù)時,根據(jù)傳統(tǒng)防撞方案,此時防撞減速信號已動作,大車只能以10%的速度運行,軌道吊移動40 m距離至少需要100 s,效率非常低。
自動化控制系統(tǒng)由于有位置層防撞,因此將防撞減速信號的作用修改為判斷2臺軌道吊位置是否準(zhǔn)確,即防撞傳感器減速信號作用時,校驗2臺軌道吊的大車位置,如果2臺軌道吊距離在W+48 m左右,則采用位置防撞保護(hù);如果2臺軌道吊距離大于W+48 m則表示其中一臺軌道吊位置出錯或者感應(yīng)到其他障礙物,需要立即減速,并報出故障。
4 自動控制系統(tǒng)防撞測試及結(jié)論
經(jīng)過優(yōu)化后,對自動控制系統(tǒng)防撞進(jìn)行測試。測試場地見圖5,要求軌道吊A、B停止時距離為18 m。測試時軌道吊A的起始位置為400 m,目標(biāo)位置為250 m。軌道吊B的起始位置為200 m,目標(biāo)位置為350 m,最大速度為4 m/s,軌道吊A往B側(cè)運行時位置變小,速度為負(fù)。測試曲線見圖6和圖7。
由圖6可以看出軌道吊A停在了292.813 m處,軌道吊B停在了274.818 m處,最后2臺軌道吊之間相距17.995 m。
通過圖6、圖7可以看出,2臺機(jī)相距較遠(yuǎn)時,速度給定為全速,當(dāng)距離值小到一定程度后自動控制系統(tǒng)的位置防撞功能起作用,限制2臺軌道吊的速度,直至2臺軌道吊之間位置小于18 m時停止。通過測試證明自動控制系統(tǒng)的位置防撞起到了保護(hù)作用,2臺軌道吊停止時的距離與設(shè)定的防撞距離W近似相等,達(dá)到了系統(tǒng)設(shè)計要求。

圖5 防撞測試軌道吊及環(huán)境
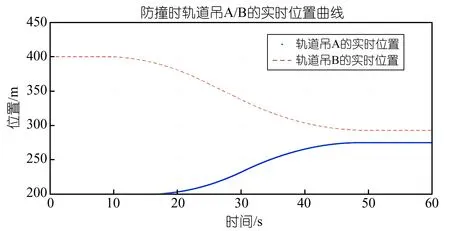
圖6 軌道吊A、B的實時位置
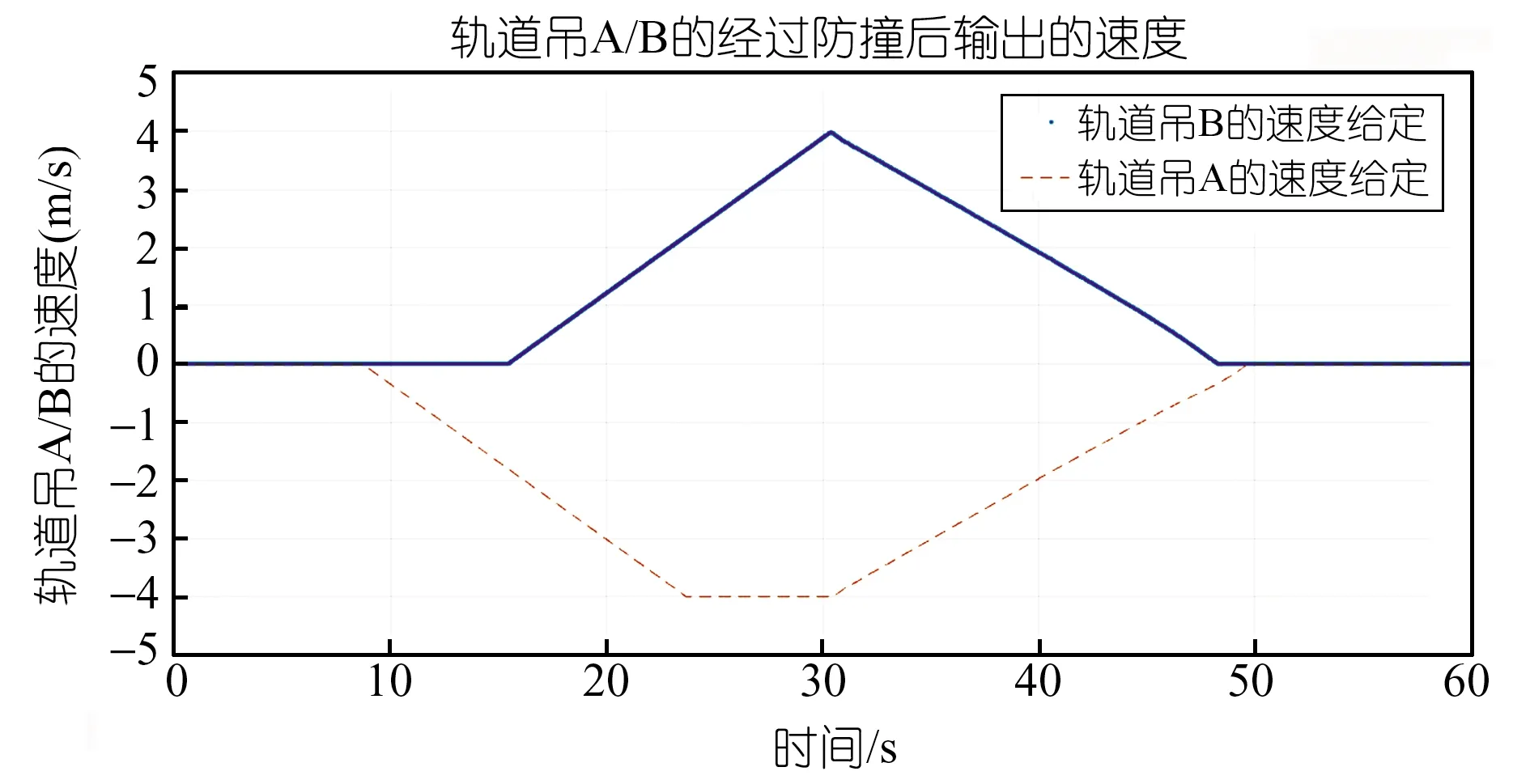
圖7 軌道吊A、B的速度反饋
5 結(jié)語
基于實時位置和速度的自動化軌道吊防撞系統(tǒng)通過算法設(shè)計,實現(xiàn)了3種工況下的軌道吊防撞速度控制,并通過優(yōu)化解決了系統(tǒng)延時和運行效率較低的弊端,通過試驗驗證了該系統(tǒng)設(shè)計的準(zhǔn)確性,能夠成功實現(xiàn)自動化堆場的軌道吊防撞,可在碼頭自動化建設(shè)中推廣運用。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
