空管設備信號覆蓋評估系統的研究和分析
2020-05-18 02:44:03張媛媛
科技視界 2020年8期
張媛媛


摘 要
空管設備中的DME測距儀、ILS儀表著落系統(盲降)、甚高頻、雷達等設備都是利用視距傳播的電磁波來進行工作,怎么才能確保設備信號覆蓋的高質量,保障航空安全,是空管技術部門一直以來亟須解決的技術問題。針對空管各類設備信號覆蓋對空管安全的重要性,空管設備信號覆蓋評估系統基于DEM(Digital Elevation Model)高程數據構建大地空間的三維模型,綜合考慮地形、地球曲面、信號在大氣傳播的折射以及臺站周邊障礙物遮蔽角等因素評估信號覆蓋情況。
關鍵詞
空管設備;DEM高程數據;信號覆蓋評估;遮蔽角
中圖分類號: V355 ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457 . 2020 . 08 . 67
0 背景
由于近年來民航行業的飛速發展,空管設備對于航空安全來說顯得更加重要。空管設備中的DME測距儀、ILS儀表著落系統(盲降)、甚高頻、雷達等設備都是利用視距傳播的電磁波來進行工作。
安全是空管行業的首要目標和基礎,因此所有空管設備均引用多重保障的運行機制,每一類空管設備信號的好壞都關系著整個航空安全,對空管設備信號的準確評估,從而確定在某一個區域采用某一個臺站的設備信號,以達到最優的設備資源配置,更好的保障空管行業的安全發展。
1 總體設計
各種空管設備的信號覆蓋評估主要考慮到兩個因素,首先是信號的覆蓋范圍,主要是受地球球面和地形遮擋的影響;另外一個是空管設備的技術手冊中所規定的該設備正常運行所應滿足的信號范圍標準,例如區域導航DME/DME的運行標準和儀表著陸設備的最小信號范圍。
基于以上兩個因素,該系統首先在WGS84大地坐標系的基礎上通過DEM(Digital Elevation Model)高程數據構建大地空間的三維模型,該模型是沒有經過投影變形的大地三維空間,然后在該模型上分析地形、地面弧度、大氣折射對空管設備信號傳播的影響,計算空管設備信號的可達區和盲區。然后,在進行區域導航DME/DME評估的時候,根據ICAO《PBN Manual》中關于DME/DME RNAV的相關標準,設計出DME/DME RNAV區域導航的性能評估方法,包括區域DME/DME有效區分析、飛行程序評估以及優選DME等;而在進行儀表著陸系統評估的時候,根據《中國國家標準——儀表著陸系統(ILS)航向/下滑信標性能要求和測試方法》中能滿足設備要求的最小信號覆蓋范圍的標準,自動分析設備信號的現實覆蓋范圍是否滿足所要求的覆蓋范圍,并得出分析結論。同時,系統也具備DME/DME現場發布功能,在校飛結果、停機計劃以及DME實時監控信息的基礎上,實時計算航路的DME/DME覆蓋情況。
2 關鍵技術的研究
2.1 計算模型的建立
信號的覆蓋分析評估先是需要構建地球空間模型,構建地球空間模型一般使用大地坐標系和高程系統,利用大地坐標系和高程系統就能夠經緯度-高度(BLH)來表達具體地標內容。該系統利用WGS84坐標系來做計算模型的坐標系統。
因為電腦的運算一般采用空間直角坐標系,所以必須采用大地坐標系和空間直角坐標系的互相轉換;再者系統是以平面的數據反饋給用戶,所以也必須采用大地坐標系和平面地圖之間的轉換,就是地圖投影。
2.1.1 大地坐標系和空間直角坐標系的轉換
2.1.2 大地坐標系和平面地圖的轉換
由于需要把地球空間信息和運算結果更直觀展示出來,所以要把大地坐標系投影到平面地圖,本系統采用墨卡托的投影方法,又稱正軸等角圓柱投影,這是地圖投影方法中使用范圍最廣的方法之一。投影采用等角投影,投影出來的經線和緯線互相垂直,如圖1所示。
假設一個垂直方向圓柱體切于或割于球體,根據同角的前提把經緯網投影到圓柱體,然后把它鋪成二維面,就是二維面經緯線網。處理后經線是一條條南北向的相同間隔的平行直線,緯線則是一條條東西向的平行直線,并且每條緯線距離由中間向兩邊擴大。一點上所有方位的距離比都相同,就是說不存在角度變化,但是面積變化十分明顯,跟著離開基準緯線中心而變大。
2.1.3 不同坐標系之間的轉換
為了看齊國際的標準,我國民航使用WGS84坐標系來做區域導航的大地坐標系統,它的精度較高、使用范圍廣,是GPS測量使用的坐標系。不過,不一樣國家地區不一樣的年代使用的大地坐標系都不同,不一樣的坐標系統使用不一樣的橢球體參數,如表1所示。我們常用的有北京54、國家80等坐標系,所以對于以北京54或者國家80坐標系表示的地理信息,必須把它轉換成WGS84坐標系,通常方法有4參數法和7參數法。
2.2 DEM高程數據的處理
本系統采用的高程數據為DEM,DEM是數字高程模型的簡稱,它是地形曲面的數字化表達,是在計算機存儲介質上真實描述和模擬的地形曲面實體,使用DEM數據有利于計算機的存儲和計算。
本系統使用DEM數據是SRTM3,SRTM為一類DEM數據,全稱是Shuttle Radar Topography Mission,是經美國太空總署(NASA)和國防部國家測繪局(NIMA)一起測量的,SRTM數據里每經緯度方格形成一個文件,精度有一秒和三秒兩類,所以叫SRTM1與SRTM3。現在可以免費獲得我國領土的 SRTM3文件,格式是ASCII編碼。SRTM3數據的組織為5度×5度作為一個高程文件,每個文件中以3秒為間隔對5度×5度的區域進行劃分,形成一個6001×6001的矩陣,矩陣中的每一個格子中的值即表示該格子的平均高程。SRTM3高程數據使用的高程基準為EGM96,是海拔高程基準的一種。目的讓系統可以自動拿到高程數據,所以要對它的格式進行解釋和存儲。
中國疆土遼闊,所以高程數據量非常大,目的是提高運算的速度和減少存儲空間,所以要對高程數據做更進的處理和壓縮,利用二進制對高度值進行重新編碼,達到減少數據占用空間的目的。
2.3 覆蓋算法設計
以大地空間模型為基準,全部信號覆蓋運算均是在模擬真實環境的空間中運行的,不是在投影地圖上運算,所以沒有投影帶來的失真問題。同時,由于大氣在不同的海拔高度密度不同,全部電磁波射線在大氣的傳播都存在折射的問題,把射線的軌跡變成曲線,因此要是直接采用直線視線來考慮地形的遮蔽就有部分的誤差,所以要對覆蓋范圍來做修正[1]。
計算結果經過投影顯示在平面地圖上,可以采用不同的投影滿足不同需求,但不影響信號覆蓋的分析結果。
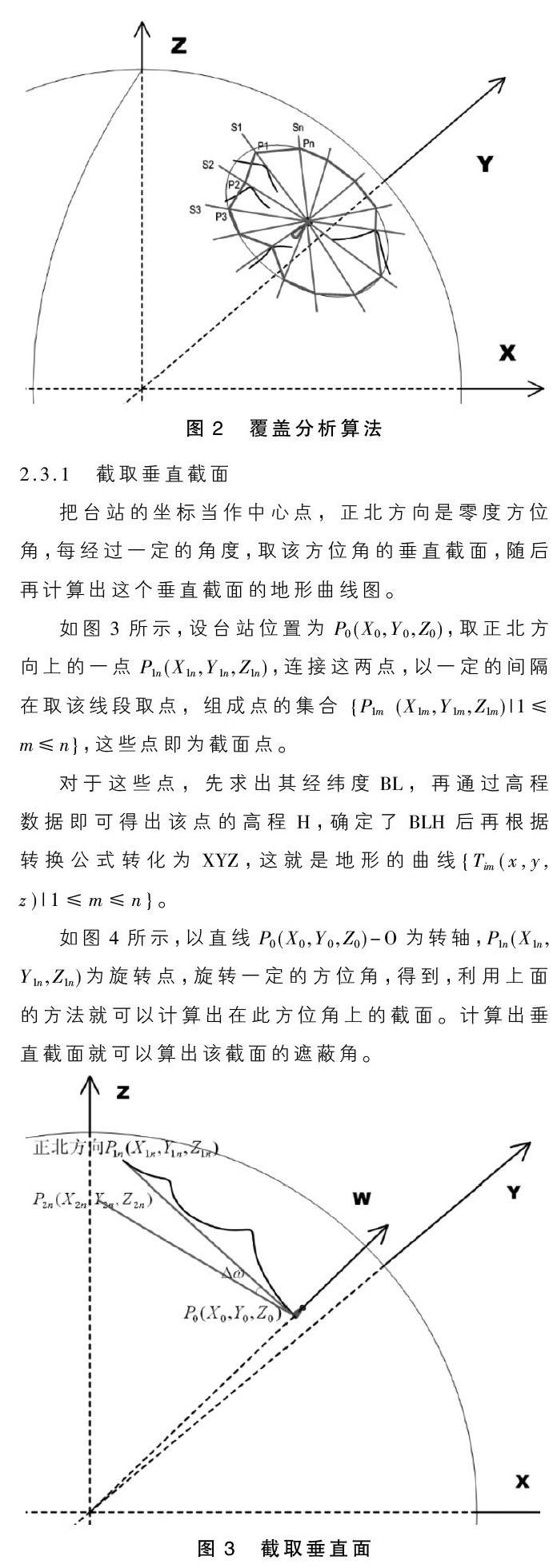
如圖2所示,計算覆蓋的過程首先把臺站當作圓心,沿360度方位角,每間隔5度角取一個垂直面,利用高程數據計算該截面的地形圖,接著模擬不一樣仰角的電波射線在這個平面中的傳播軌跡,和受地形遮擋的問題,就能夠知道該垂直面的信號覆蓋情況。在確定每一個垂直面的覆蓋范圍后,就能夠知道每一個高度層的水平面的覆蓋范圍,如果有確定的高度層,則要求出每個垂直面在該高度的最遠覆蓋點,把這些點連接起來就能夠知道該高度的水平覆蓋范圍[2]。
2.3.1 截取垂直截面
把臺站的坐標當作中心點,正北方向是零度方位角,每經過一定的角度,取該方位角的垂直截面,隨后再計算出這個垂直截面的地形曲線圖。
如圖3所示,設臺站位置為P0(X0,Y0,Z0),取正北方向上的一點P1n(X1n,Y1n,Z1n),連接這兩點,以一定的間隔在取該線段取點,組成點的集合{P1m(X1m,Y1m,Z1m)|1≤m≤n},這些點即為截面點。
對于這些點,先求出其經緯度BL,再通過高程數據即可得出該點的高程H,確定了BLH后再根據轉換公式轉化為XYZ,這就是地形的曲線{Tim(x,y,z)|1≤m≤n}。
如圖4所示,以直線P0(X0,Y0,Z0)-O為轉軸,P1n(X1n,Y1n,Z1n)為旋轉點,旋轉一定的方位角,得到,利用上面的方法就可以計算出在此方位角上的截面。計算出垂直截面就可以算出該截面的遮蔽角。
2.3.2 最大遮蔽角的計算
要計算設備天線頂端坐標P0到某個點Px的遮蔽角,設地球球心原點為O(0,0,0),R1=P0到O的距離,R2=Px到O的距離,R3=P0到Px的距離,使用正弦定理,可得出夾角Px-P0-O的值a。a-90即為遮蔽角的值。
在垂直截面上所有點都算一次,求出在某個高度層最大的遮蔽角。
2.3.3 大氣折射修正及垂直覆蓋范圍
2.3.4 水平覆蓋范圍計算
確定某一高度的水平面,算出每個垂直面在這個高度的最遠覆蓋點,把這部分點投影到二維地圖,然后連接起來就能算出該高度的水平面覆蓋范圍[5-6]。
3 未來展望
目前系統基于DEM(Digital Elevation Model)高程數據構建大地空間的三維模型,綜合考慮地形、地球曲面、信號在大氣傳播的折射以及臺站周邊障礙物遮蔽角等因素評估信號覆蓋情況。
不過本系統還未考慮電磁波傳播過程中繞射、散射以及不同材質物體對電磁波的影響等復雜特性,因此系統計算的設備信號覆蓋范圍與實際情況存在一定的誤差,接下來將進一步研究電磁波的不同特性,嘗試將這些特性納入系統的計算方法中。并且目前系統使用的數字高程是90米×90米精度的,精度方面還可以繼續提高為30米×30米的;系統對經緯度的描述是精確到秒的個位,在提高數字高程精度的基礎上,可考慮將經緯度描述的精度提升到秒的小數點后一位或兩位。
參考文獻
[1]田傳江,劉繼軍.地形遮蔽的雷達低空探測效能研究[J].微計算機信息,2005,21(26):208-209.
[2]施東煒.基于地球球面和折射分析地形對雷達的遮擋[J]. 電子測量技術,2011,(07):40-42.
[3]張瑜,赤娜,胡笑君.光學雷達大氣折射誤差修正方法研究[J].電火與控制,2009,16(5):16-18.
[4]劉子孺,陳加清.龍格-庫塔方法在雷達射線描跡中的應用[J].火力與指揮控制,2009,34(8):175-177.
[5]王彬虎,景振毅,徐杰,等.分布式頻域電磁散射特性測量系統[J].電子測量技術,2009,32(5):138-140.
[6]李國清,楊井勝,王勇.基于LabVIEW的雷達自動測試系統[J].國外電子測量技術,2009,28(2):31-34.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00