蔬菜移栽機斜插夾缽式取投苗裝置研制
2020-05-19 07:46:18謝守勇陽尚宏謝秋菊段廷億
農業工程學報 2020年6期
謝守勇,陽尚宏,劉 軍,宋 磊,謝秋菊,段廷億
(1.西南大學工程技術學院,重慶 400715;2.丘陵山區農業裝備重慶市重點實驗室,重慶 400715)
0 引 言
近年來,蔬菜產業成為僅次于糧食種植的產業,其種植面積達到0.2億hm2以上,使得中國成為世界上蔬菜第一大生產和消費大國[1]。采用育苗移栽方式種植的蔬菜占到了蔬菜種植總量的60%以上,其具有高產穩定、對氣候補償和提高土地利用率等優勢[2-4]。但是蔬菜生產屬于勞動密集型產業,“用工難、難用工”日益嚴重,導致蔬菜生產勞動力成本占蔬菜生產總成本50%以上,成為制約其發展的主要因素,因此研究蔬菜移栽機械化、自動化作業是蔬菜產業持續發展的必然趨勢[5-10]。取投苗是蔬菜移栽中一個非常重要的環節,但是目前國內用于蔬菜移栽的機具主要是半自動移栽機,取投苗仍停留在人工取苗、投苗階段,勞動強度大,生產效率低,因此研究全自動蔬菜移栽機取投苗裝置具有重要意義[11-13]。
國內外學者對取投苗裝置進行了廣泛研究,提出了頂出式[14]、頂出夾取式[15-18]、插入夾取式[19-24]、氣力式[25-28]等形式多樣的取投苗裝置。意大利法拉利公司提出了一種頂出夾取式取苗機構,采用自動控制系統與氣動系統相結合的方式,其對缽苗的適應性較強、損傷率較低,但是價格昂貴[29];日本井關農機株式會社研制了一種頂出式取苗機構,效率較高,但其對與之配套的送苗機構的精度和缽苗的質量要求很高[30];Yung等[31]提出了一種基于視覺系統的機械手移栽機構,利用視覺系統對缽苗位置及姿態進行估算后,由機械手插入缽體中進行取投苗;Rahul等[32]設計了一種5R二自由度并聯機器人手臂用于蔬菜移栽,采用機械電子的方法減少了機構的重量,能適應不同的姿態要求;趙勻等[33]提出了一種探入式番茄缽苗移栽機構,采用非圓齒輪行星系機構結合探針通過探入和脫離缽體完成夾缽和投苗動作,可以有效避免對土缽和根系的損壞;童俊華等[34]提出了一種三臂回轉式取苗機構,通過在滿足特定取苗動作姿態下增加回轉臂數量來實現高速取苗作業;黨玉功等[35]提出一種單自由度四連桿取投苗機械臂,采用行星輪系和凸輪機構對多余自由度進行約束,工作較穩定;王蒙蒙等[36]提出了一種曲柄擺桿式夾苗機構,可減小對缽苗的損傷,有較高的取苗成功率,但需要將缽苗頂出后再進行夾取;袁挺等[37]提出了一種氣吹振動復合式取苗機構,通過氣吹與振動相結合的方式使得缽苗與苗盤脫離落入導苗管內,效率較高,但該機構受環境因素影響較大不適合大田移栽。
現有的取投苗裝置,取投苗速率及成功率均有較大的提高,但是結構較為復雜,為此本文提出一種蔬菜移栽機斜插夾缽式取投苗裝置,并以木耳菜苗為試驗對象,通過理論與試驗分析,完成裝置的優化設計與參數優選,以期為全自動蔬菜移栽機的可持續發展提供研究基礎。
1 整機結構和工作原理
1.1 整機結構
本文研制的斜插夾缽式取投苗裝置,搭載在自制的試驗平臺上,如圖1所示。試驗平臺主要由底部平臺、斜面移盤裝置、取投苗裝置和送苗裝置等部分組成。底部平臺起支撐作用,斜面移盤裝置配合取投苗裝置完成取苗動作,送苗裝置配合取投苗裝置完成投苗動作,其中取投苗裝置結構如圖2所示,由傳動機構和夾苗機構兩部分組成。傳動機構主要由機座、支撐軸、轉動軸、主步進電機、減速器、主動桿、從動桿等組成;夾苗機構主要由苗夾、彈簧、苗夾連接板、連桿、副步進電機、固定框架、凸輪連接軸和凸輪等組成。
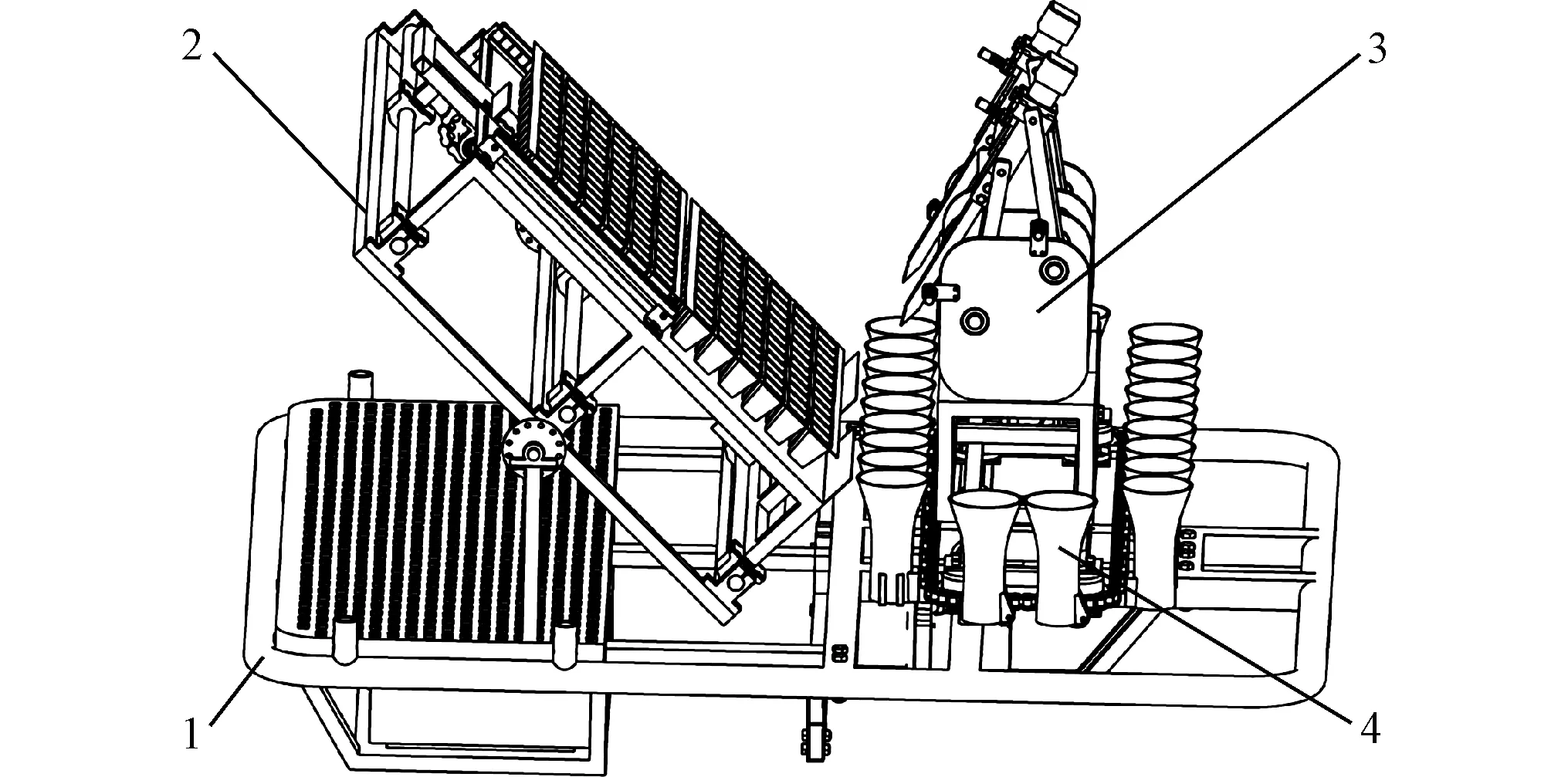
圖1 試驗平臺Fig.1 Test platform
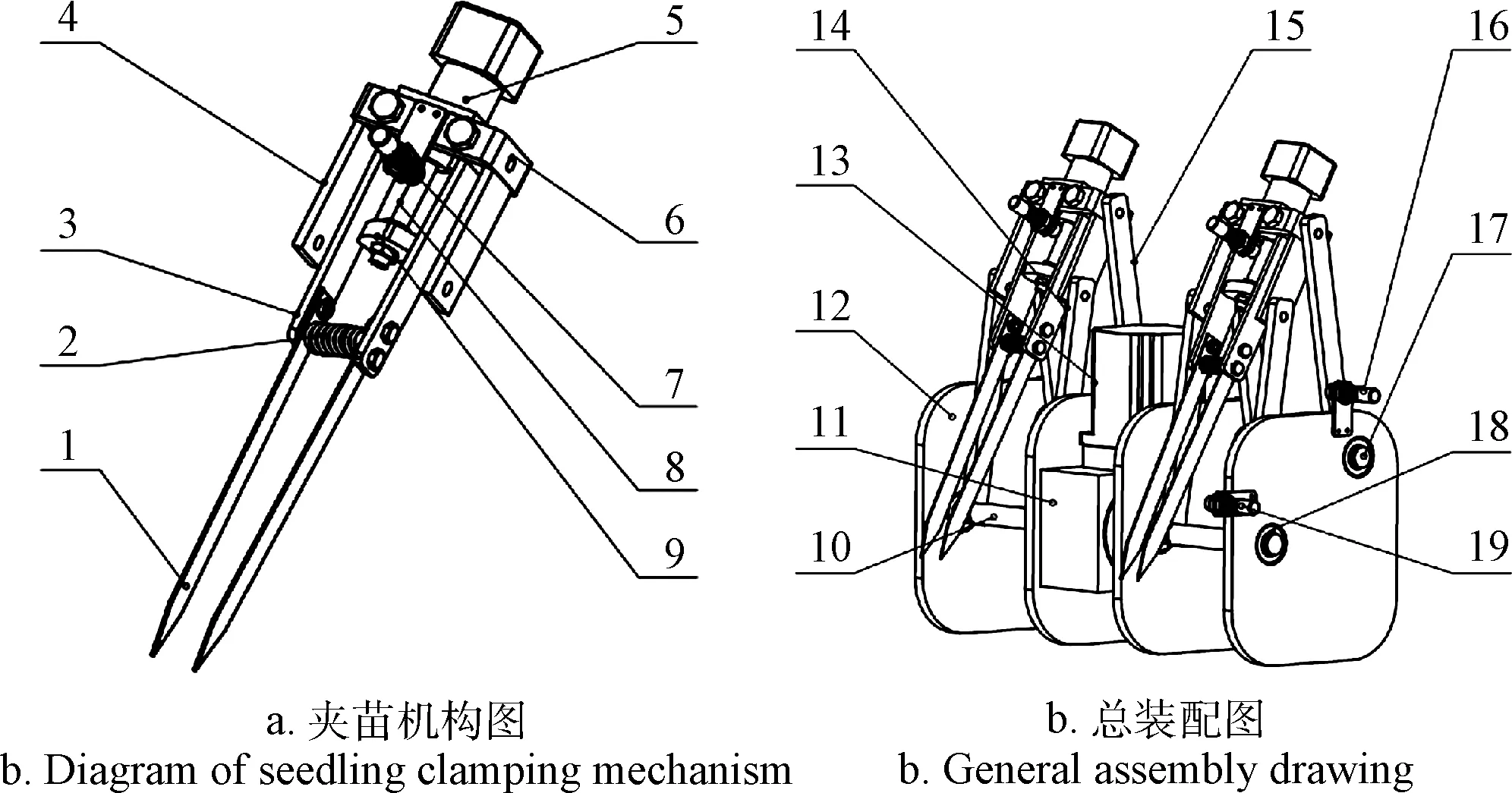
圖2 取投苗裝置結構圖Fig.2 Structural diagram of seedling taking and throwing device
1.2 工作原理
斜插夾缽式取投苗裝置工作原理如圖3所示。主步進電機驅動主動桿AD繞轉動軸往復旋轉,夾苗機構CDE由于主動桿AD的帶動以及從動桿BC的限制,其繞D點作往復擺動,其擺動的極限位置E1和E2點分別為取苗點位置和投苗點位置。在進行取苗作業時,夾苗機構CDE在主動桿的帶動下運動到E1點,此時彈性苗夾處于張開狀態,當苗夾沿穴苗盤內壁插入缽體時,副步進電機帶動凸輪旋轉,苗夾閉合夾缽完成取苗;取苗后夾苗機構CDE運動到投苗點E2時,凸輪旋轉克服彈簧力打開苗夾,缽苗依靠重力作用落入送苗裝置的苗杯中,完成投苗。
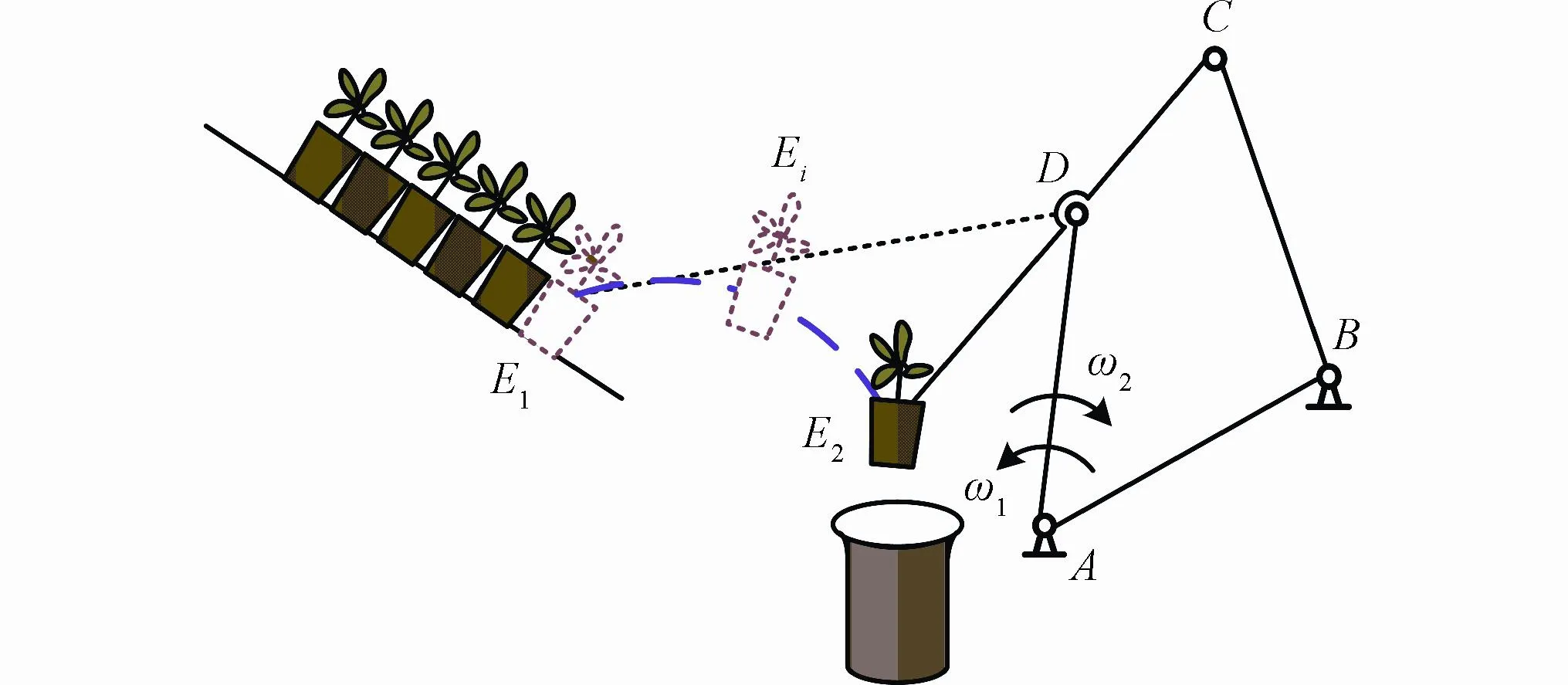
圖3 取投苗裝置工作原理圖Fig.3 Working principle diagram of seedling taking and throwing device
取投苗裝置初始位置均由相應的接近開關確定,通過蝸輪蝸桿減速器的自鎖來保持裝置的工作狀態。苗夾的夾取動力由彈簧提供,苗夾材料選用彈性材料,可以減小對缽苗基質的損傷,通過調整副步進電機所轉過的角度改變苗夾打開的角度,可提高對不同缽苗夾取的適應性。
2 關鍵結構設計
2.1 取投苗裝置結構設計
將苗盤固定在斜面移盤裝置上,控制苗盤縱向及橫向運動,由于苗盤孔的寬度一般不超過40 mm,如圖4所示,故設計彈性苗夾最大張開寬度為42 mm。將苗盤分為2部分,2個夾苗機構同時夾取,可提高取投苗效率,故設計2個夾苗機構中心位置距離為258 mm。
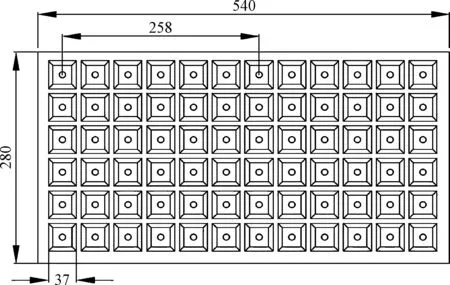
圖4 穴苗盤尺寸Fig.4 Size of seedling tray
為了提高取投苗裝置的效率與自動化程度,本文按照預定的缽苗運動軌跡(如圖3所示)設計取投苗裝置,選取苗夾端的一個基點E,用其坐標(xE,yE)和苗夾的方位角θ來表示苗夾位置,因此,預定的缽苗運動軌跡可表示為苗夾上的E點所占據的一系列預定位置Ei(xEi,yEi)及苗夾的相應轉角θ2i。
將圖2中的取投苗裝置簡化并建立如圖5所示坐標系。
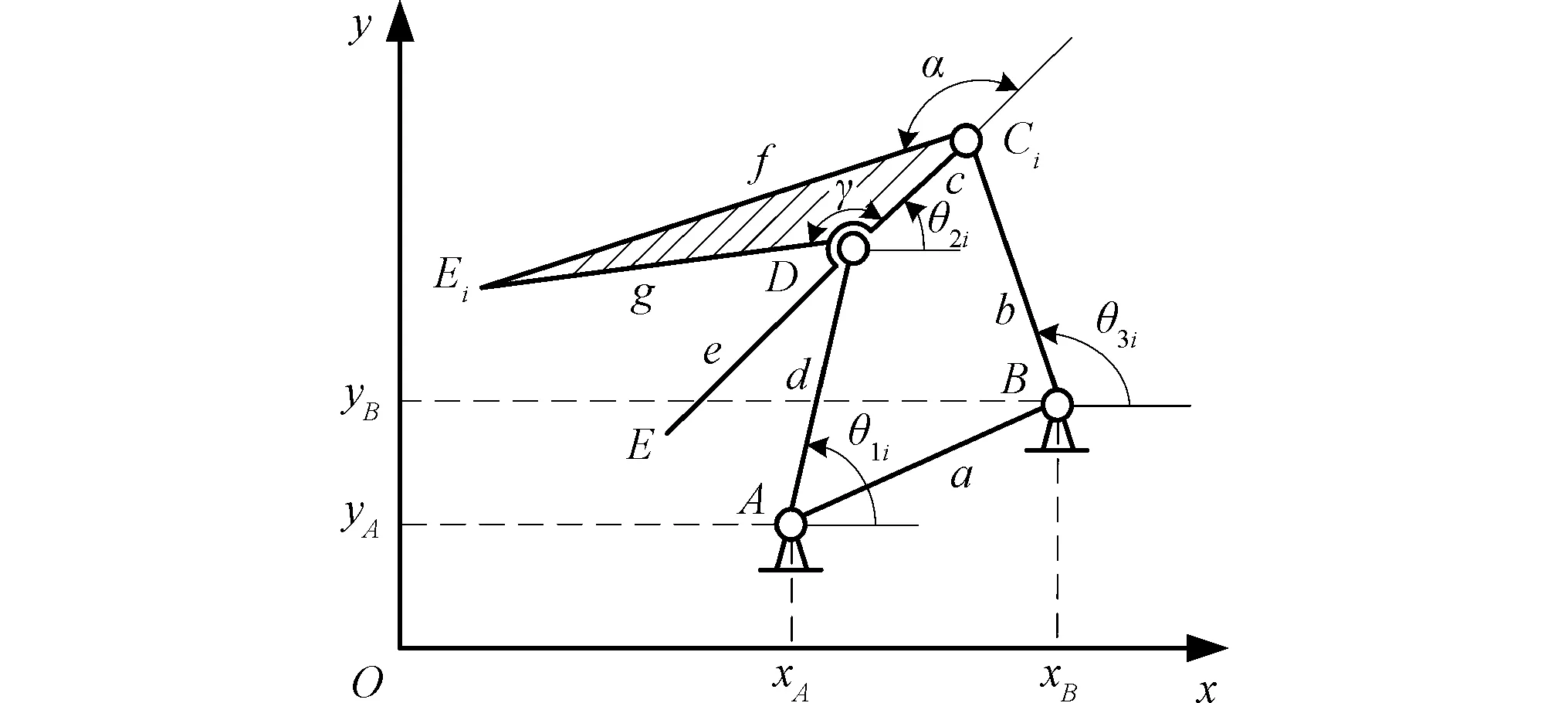
圖5 取投苗裝置簡化圖Fig.5 Simplified diagram of seedling taking and throwing device
為確定取投苗裝置各構件的結構尺寸,將圖5中的簡化機構分為左、右2個桿組,如圖6所示。
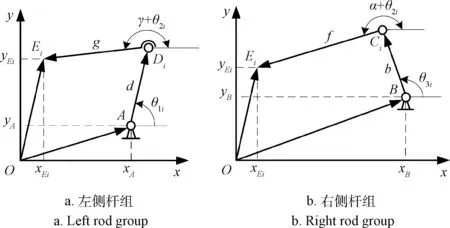
圖6 左右側桿組Fig.6 Left and right rod groups
分別建立左右側桿組的矢量封閉圖,根據圖6幾何關系可得:
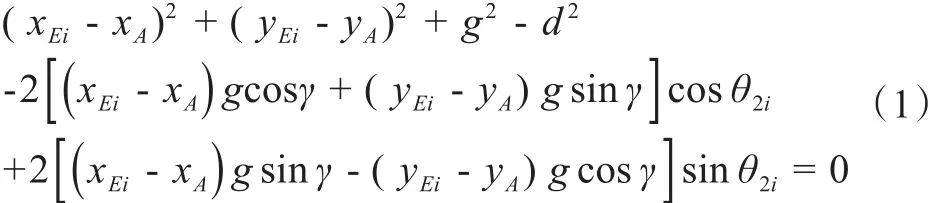
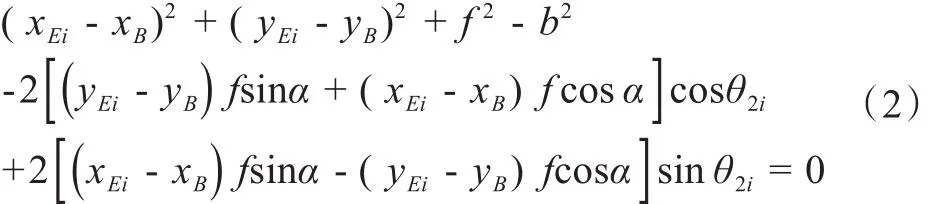
式(1)、(2)均為非線性方程,各含有5個待定參數,分別為xA、yA、d、g、γ和xB、yB、b、f、α,所以最多只能按照5個苗夾端點預定位置精確求解。當預定位置N<5時,可預選N0=(5-N)個參數。本文選取3個苗夾端點預定位置,即取苗點E1(xE1,yE1)、投苗點E2(xE2,yE2) 和軌跡上任意一點 Ei(xEi,yEi),同時預選xA、yA和xB、yB, 則式(1)、(2)可簡化為線性方程:

式 中 X0, X1,X2,Y0, Y1,Y2為 新 變 量 ;A1i,A2i,A3i,B1i,B2i,B3i為已知的系數。
根據預選的點及式(3)、(4)求得新變量后,可得到待定參數:
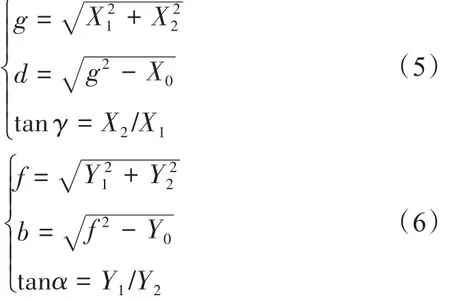
根據得到的待定參數可求得C點及D點的坐標:
最后可求得取投苗裝置的各桿長為
根據取投苗裝置在試驗平臺上的位置,選取點A(395,105)、B (495,175) 以及取苗點位置 E1(28,132)、投苗點位置E2(300,75)、軌跡上任意一點Ei(174,117),然后由公式(5)~(9)計算可得:機架長度a=122 mm,從動桿長b=196 mm,連桿長度c=80 mm,主動桿長度d=186 mm,苗夾長度e=256 mm;苗夾在取苗點E1時轉角θ21=25°,在投苗點E2時轉角θ22=60°;苗夾在取苗點E1時轉角θ11=135°,在投苗點E2時轉角θ12=81°。
2.2 苗夾入穴參數確定
在夾苗機構取出缽苗時,應盡量減小對缽苗的損傷,因此需要對苗夾入穴的深度、角度等參數進行合理設計[23]。本文所用取苗末端執行器為鑷子型鉗夾式末端執行器,其取苗模型如圖7所示。
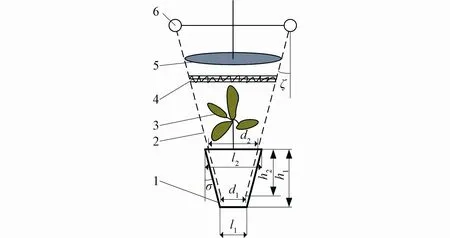
圖7 苗夾夾取缽苗示意圖Fig.7 Schematic diagram of seedling clamp clipping pot seeding
本文選用臺州隆基塑業有限公司生產的Q72型穴苗盤,l1=17 mm;l2=37 mm,h1=45 mm;σ=12.5°。
為保證苗夾出入穴時,不破損苗盤穴壁及盡量減少對缽苗的損傷,應滿足:
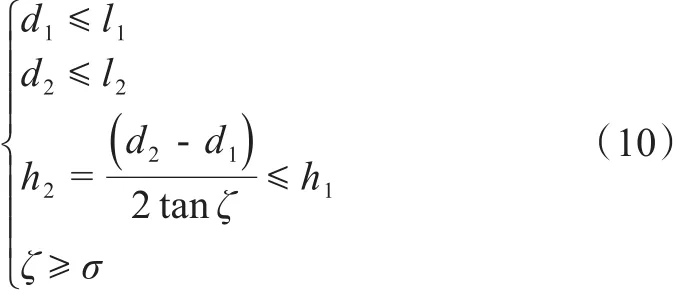
當苗夾與孔穴壁的間隙小于2~3 mm并盡可能深地插入苗缽時有利于成功取苗[38],為此設計苗夾入穴角度ζ=13°,d1=14 mm,d2=32 mm,此時苗夾入穴深度h2=39 mm,可保證苗夾與孔穴壁間有2~3 mm間隙。
2.3 苗盤傾斜角度確定
苗盤傾斜角度會影響取苗效果,若傾斜角度過大,缽苗趨于水平狀態,缽苗會在重力作用下自然脫落;若傾斜角度過小,缽苗趨于豎直狀態,不利于取苗。通過上述分析可知,苗夾在取苗點和投苗點時與水平面的傾角分別為25°和60°,當苗夾在取苗點垂直夾取缽苗時具有較好的取苗效果,如圖8a所示,而在投苗點缽苗接近豎直狀態時的投苗效果較好,如圖8b所示。
由圖8可知,當苗夾在取苗點垂直夾取缽苗時β1=25°,此時缽苗盤與水平面的傾角為δ1=65°;當苗夾在投苗點豎直投苗時β2=60°,此時苗夾與缽苗間的角度β3=30°,豎直投苗狀態時缽苗盤與水平面的傾角為δ2=35°。因此,若要同時使得取投苗裝置有較好的取苗效果和投苗效果,則缽苗盤的傾斜角度應在35°~65°。
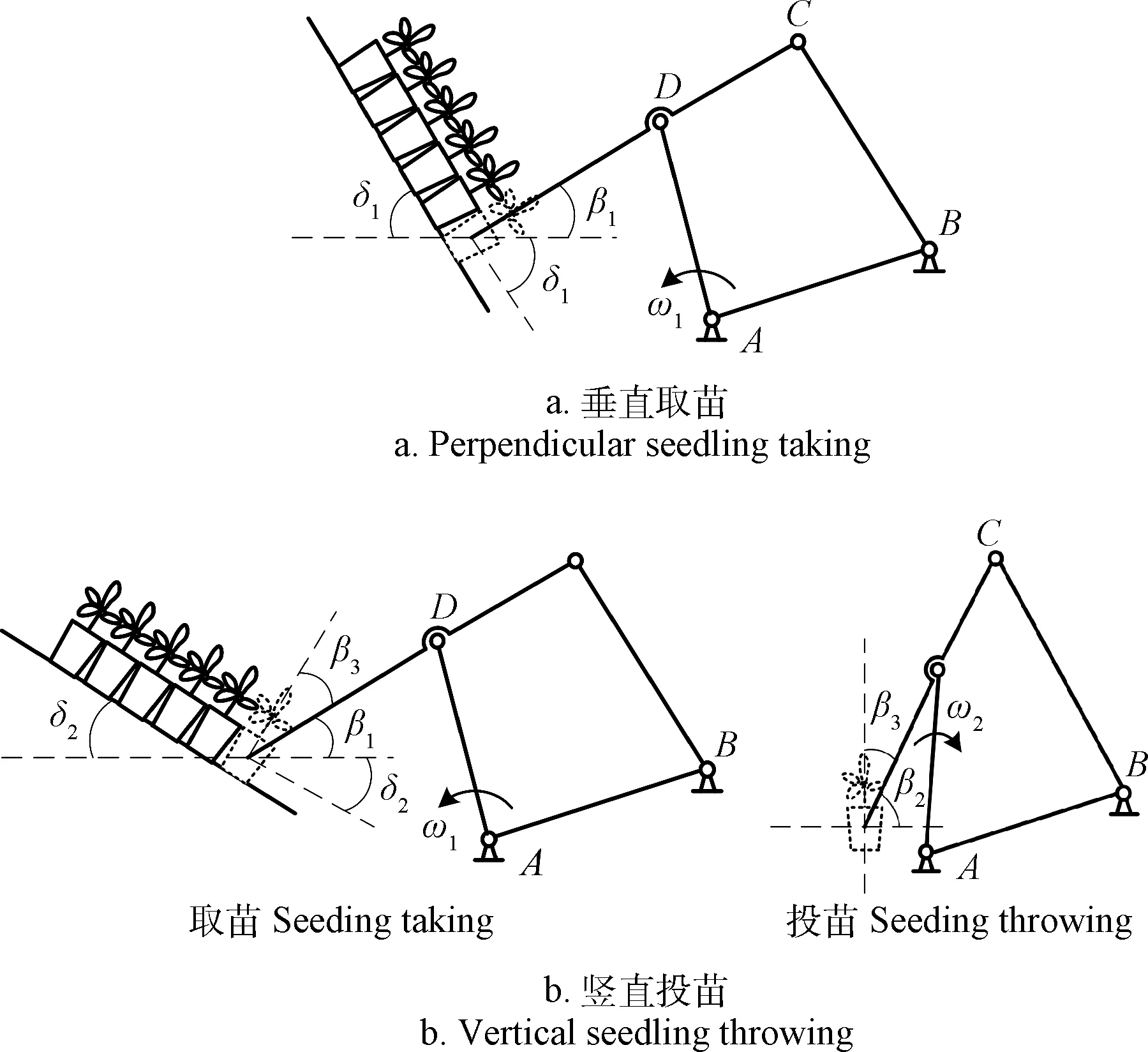
圖8 取投苗狀態Fig.8 Seedling taking and throwing state
2.4 取投苗裝置運動學分析
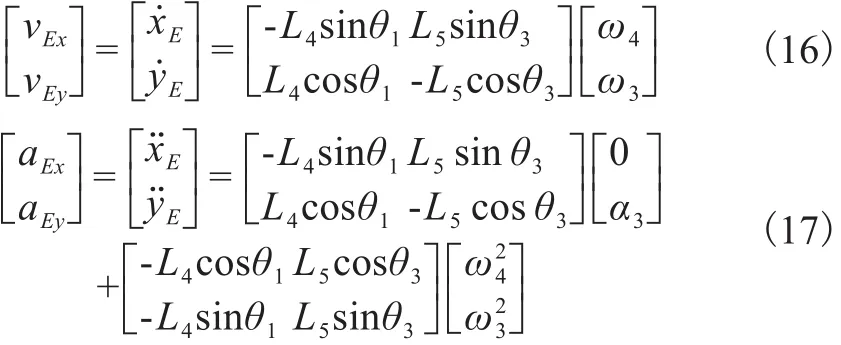
根據設計要求,取投苗裝置在規定位置完成取苗與投苗動作,在取苗時苗夾運動到取苗點,夾取缽苗后返回,此過程中加速度不宜過大,以保證取苗穩定性;在投苗時苗夾運動到投苗點,此過程中苗夾的水平速度不宜過大,以保證投苗精度。對取投苗裝置進行運動學分析,以機架為X軸建立如圖9所示的直角坐標系。在圖9中,取投苗裝置的矢量位置方程為
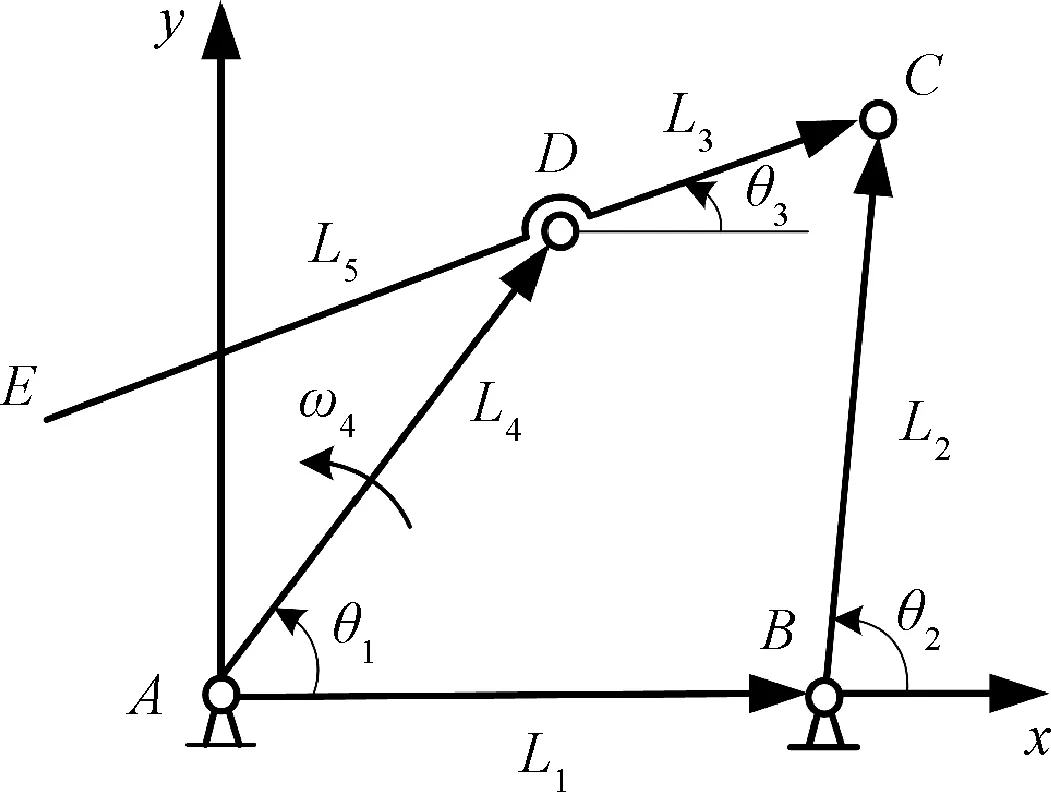
圖9 取投苗裝置運動簡圖Fig.9 Movement diagram of seedling taking and throwing device

對其進行位置分析可得:

式(12)對時間求導可得從動桿和連桿的角速度為

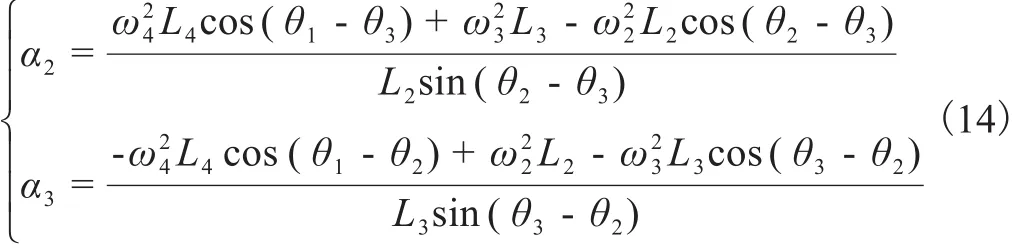
式(13)對時間取導可得從動桿和連桿角加速度為
由圖9可以得到苗夾末端E點的坐標為

則苗夾末端E點的速度、加速度分別為
2.5 取投苗裝置運動學仿真分析
根據上述分析,建立坐標系(x軸正向表示取投苗過程水平方向,y軸正向表示取投苗過程豎直方向,滿足右手坐標系),為研究苗夾末端的運動規律,對取投苗裝置進行運動學仿真分析,設置取投苗裝置完成一次取投苗動作所用時間為1.5 s,此時有:
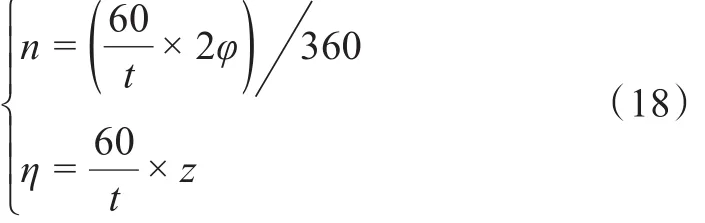
式中n為主動桿轉速,r/min;η為取投苗效率,株/min;φ為從投苗點到達取苗點時主動桿轉過的角度,φ=54°;t為完成一次取投苗動作規定時間,s;z為取投苗裝置夾苗機構個數,z=2。
由式(18)可知此時的主動桿轉速為12 r/min,取投苗效率為80株/min,將斜插夾缽式取投苗裝置導入Creo3.0機構分析模塊中,得到如圖10所示的苗夾末端位移、速度、加速度曲線。
由圖10可知,在1.5 s內取投苗裝置完成一次取投苗(即一個運動周期),在最高點完成取苗動作,在最低點完成投苗動作,此過程中在取苗點時苗夾末端豎直速度較小并緩慢變化,有利于減小苗夾在夾缽過程中對缽體的損傷;在投苗點時苗夾末端水平速度接近于0,有利于缽苗順利落入苗杯中,可有效提高投苗精度。苗夾末端的運動規律符合取投苗裝置的設計要求,但是在夾苗動作開始和終止時具有較大加速度,這是由于裝置的運動慣性所致,因此為保證取投苗裝置的穩定性,主動桿轉速不宜過大。
3 取苗軌跡驗證試驗
苗夾端點的運動軌跡是否合理,直接影響取投苗裝置的工作性能與取投苗質量[34],因此需要通過仿真分析和試驗軌跡對比驗證所設計的取投苗裝置的可行性。將取投苗裝置的整體三維模型導入Creo3.0軌跡曲線分析模塊中進行仿真,然后將取投苗裝置安裝在試驗平臺上,調節主步進電機使主動桿轉速為12 r/min,使取投苗轉置空轉運行,利用攝像機拍攝其工作視頻,最后通過Photoshop軟件對視頻進行解析[30],以苗夾端點為觀測點,對其軌跡點逐個描繪,得到取投苗裝置實際運動軌跡,試驗結果如圖11所示。
由圖11可以看出,取投苗過程的仿真和試驗軌跡曲線基本一致,驗證了取投苗裝置設計的正確性以及可行性。
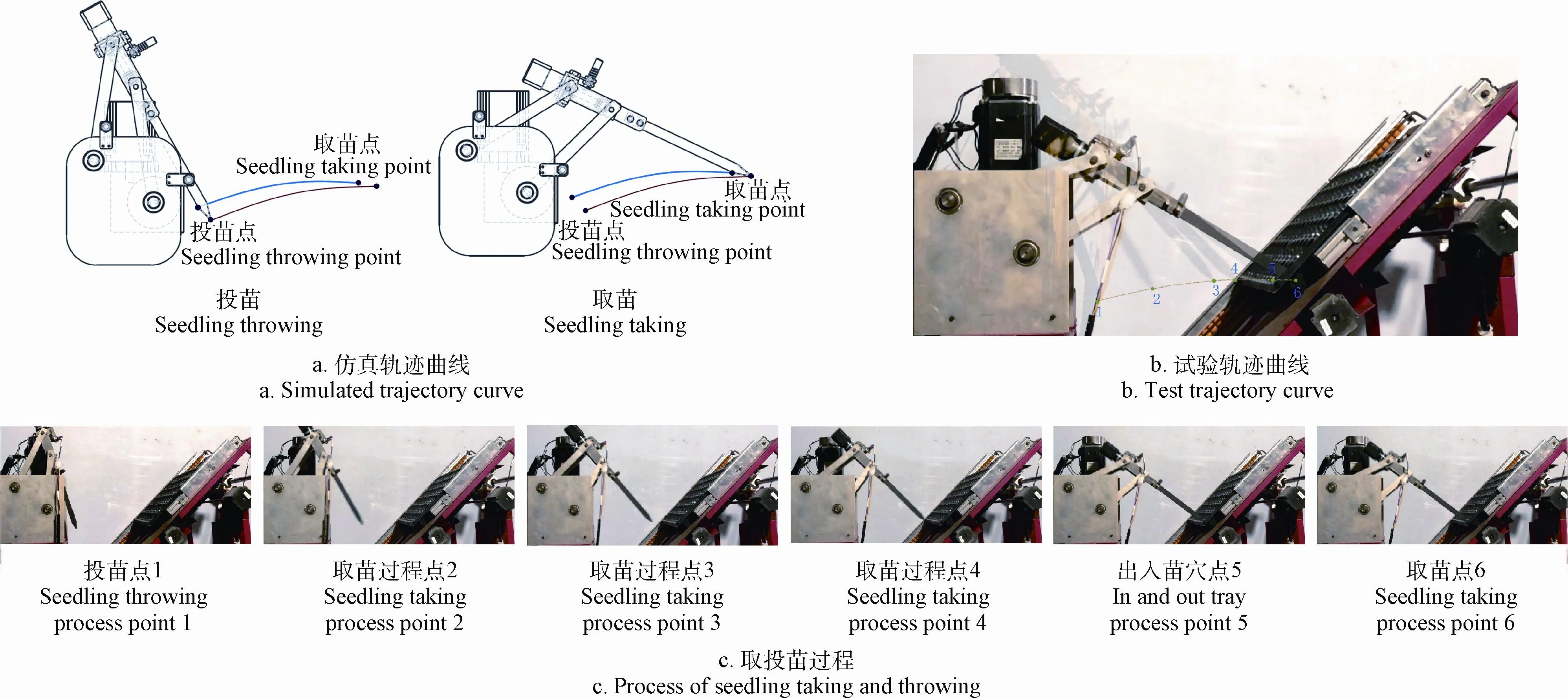
圖11 試驗結果Fig.11 Test result
4 取投苗試驗
4.1 試驗條件
為了驗證所設計的取投苗裝置實際取投苗效果,尋求最優參數組合,將取投苗裝置安裝在自主研發的移栽機試驗平臺上,進行取投苗試驗,如圖12所示。試驗用苗為西南大學丘陵山區農業裝備重慶市重點實驗室培育的苗齡15 d的木耳菜苗,13盤,共936株,所用苗盤為臺州隆基塑業有限公司生產的Q72型穴苗盤,穴口為37 mm×37 mm,穴深45 mm,基質為草炭、蛭石和珍珠巖按3:1:1比例混合而成。

圖12 取投苗試驗Fig.12 Test of seedling taking and throwing
4.2 試驗評價指標
以取投苗成功率為試驗指標。取投苗成功率是指未發生缽苗脫落和大量基質破碎的概率,主要由缽苗脫落率及基質破碎率來衡量。缽苗脫落率是指夾苗機構在取苗點取苗后運動到投苗點放苗時,因缽苗脫落而未落入苗杯中的概率。基質破碎率是指在夾苗機構將缽苗夾取后成功投放到苗杯的過程中,缽苗基質散落的質量大于缽苗總質量1/3的概率。
缽苗脫落率Q為

基質破碎率[37]U為

取投苗成功率V為

式中R為成功夾取并投放到苗杯中的缽苗數;S為缽苗總數;T為成功夾取但缽苗基質散落質量大于總質量1/3的缽苗數。
4.3 試驗因素和水平
根據斜插夾缽式取投苗裝置的工作原理,選取彈簧的剛度系數、主動桿轉速和苗盤傾斜角度作為試驗因素,每個試驗因素選取3個水平。苗夾依靠彈簧的夾緊作用取出缽苗,夾取缽苗時不同剛度系數的彈簧會影響夾持力的大小[23,36],因此選擇彈簧剛度系數水平分別為300、400和500 N/m。根據行業標準[39]和式(18),選擇主動桿轉速水平分別為8、12和16 r/min,此時取投苗效率分別約為55、80和110株/min。根據苗盤傾斜角度分析結果(35°~65°),選擇苗盤傾斜角度水平分別為35°、45°和55°,如表1所示。
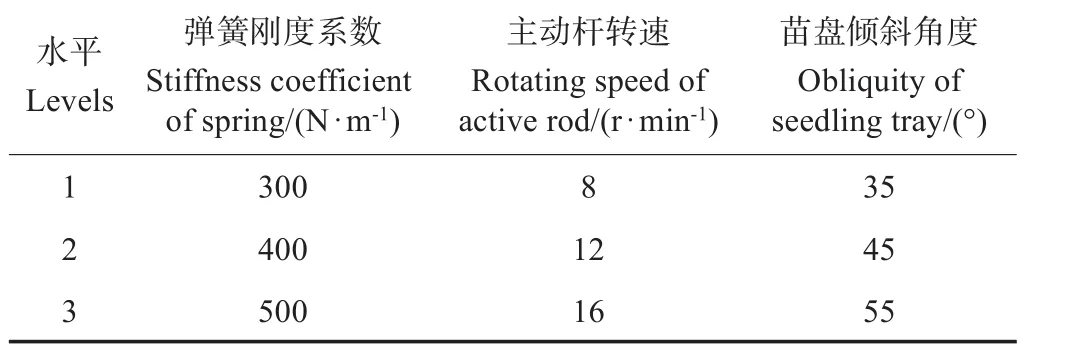
表1 因素水平表Table 1 Factors and levels
4.4 試驗方法
采用三因素三水平正交試驗(即選用L9(34)正交表),正交試驗表如表2所示。按照表中數據依次改變彈簧的剛度系數、主動桿轉速、苗盤傾斜角度,為更換苗盤方便及取投苗動作連續,設定每組試驗36次(即取完一盤苗,共72株),每組試驗完成后記錄數據并統計成功率,共9組324次試驗。通過對正交試驗數據的分析得出裝置的最優參數組合,并進行驗證試驗。
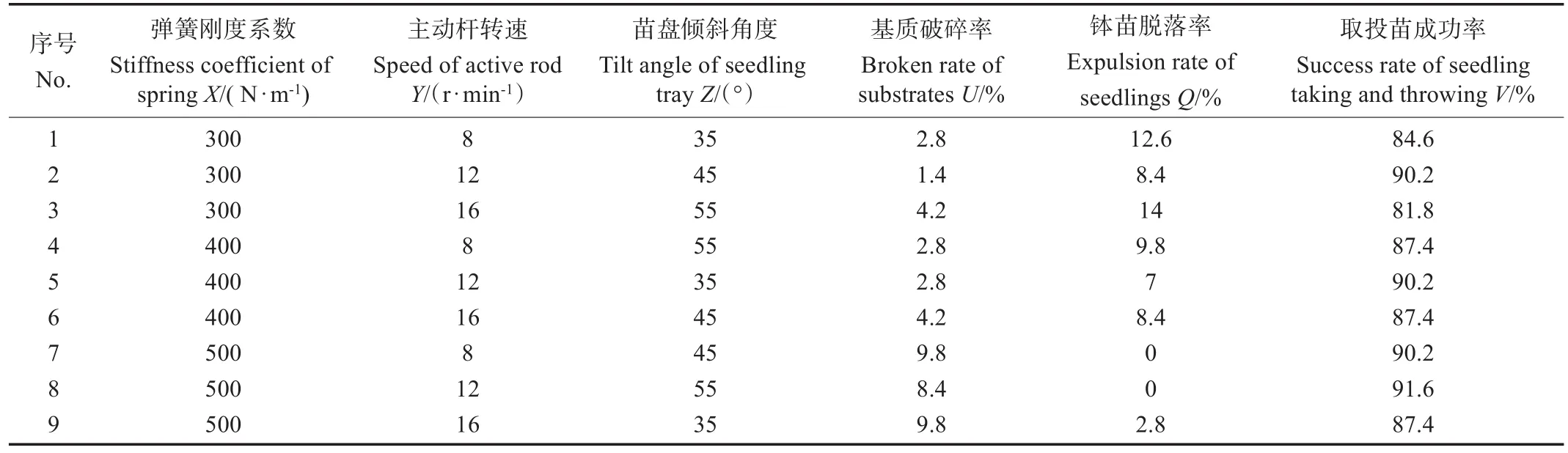
表2 取投苗正交試驗方案及結果Table 2 Orthogonal test scheme and results of seedling taking and throwing
4.5 試驗結果與分析
由表2可以看出,3種彈簧剛度系數下的取投苗平均成功率分別為85.5%、88.3%和89.7%;3種主動桿轉速下的取投苗平均成功率分別為87.4%、90.7%和85.5%;3種苗盤傾斜角度下的取投苗平均成功率分別為87.4%、89.3%和86.9%,對試驗結果分別進行方差分析和極差分析,如表3、表4所示。
由F統計量分布的檢驗標準[40-41]及表3可知,彈簧剛度系數和主動桿轉速對取投苗成功率有顯著影響,苗盤傾斜角度對取投苗成功率影響不顯著。
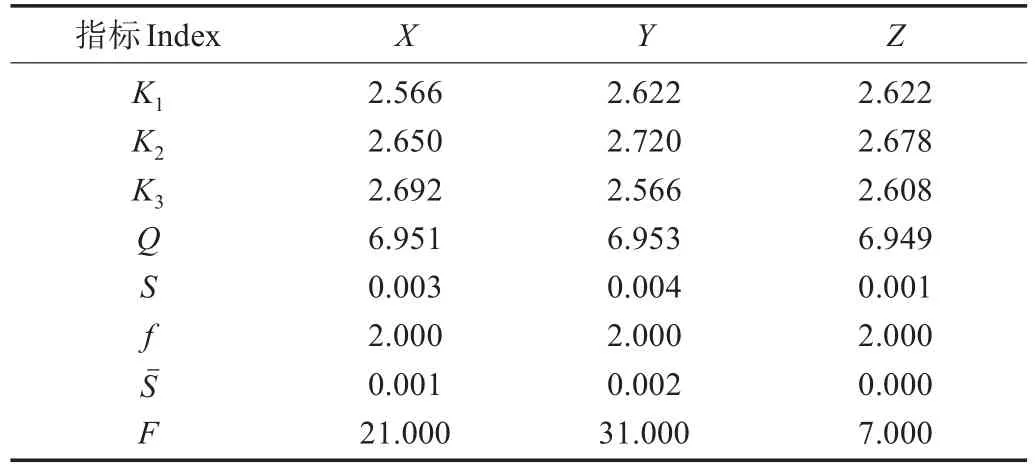
表3 試驗結果方差分析Table 3 Variance analysis of test results
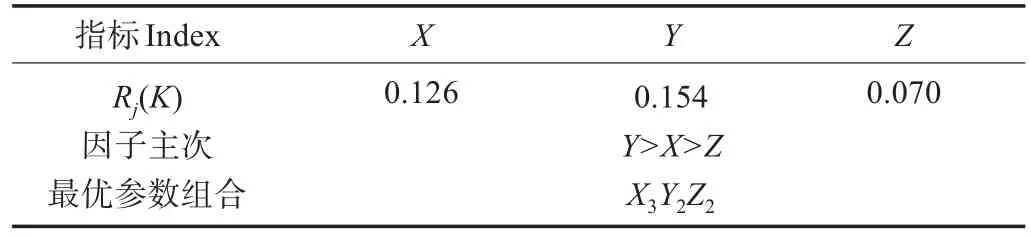
表4 試驗結果極差分析Table 4 Range analysis of test results
由表3、表4可知,主動桿轉速對夾取成功率影響最大,其次是彈簧剛度系數和穴苗盤傾斜角度,其最優參數組合為彈簧勁度系數500 N/m、主動桿轉速12 r/min、苗盤傾斜角度45°。為驗證優化結果的合理性,以最優組合參數進行驗證試驗,共144次(即取完4盤苗,共288株),結果取平均值,如表5所示。

表5 最優參數組合驗證試驗Table 5 Optimal parameter combination verification test
在驗證試驗過程中,取投苗裝置與送苗裝置配合完成連續取投苗動作,由于取投苗裝置和送苗裝置的配合誤差使得投苗點發生偏移,產生了較少的缽苗脫落,平均脫落率為2.43%。由于基質含水率、缽苗盤根情況等因素影響造成了少量缽苗破碎,平均基質破碎率為3.13%,對生長情況較好的缽苗,該取投苗裝置具有較高的可靠性,最優組合參數下的平均取投苗成功率為94.44%。
5 結 論
1)設計了一種斜插夾缽式取投苗裝置,并對取投苗裝置運動過程進行分析,獲得了裝置取投苗運動過程的仿真軌跡曲線及試驗軌跡曲線,驗證了設計的可行性。
2)以取投苗成功率為試驗指標,以彈簧剛度系數、主動桿轉速和苗盤傾斜角度為試驗因素,對取投苗裝置進行三因素三水平正交試驗。試驗結果表明,彈簧剛度系數和主動桿轉速是影響取投苗成功率的顯著因素,苗盤傾斜角度影響不顯著。最優參數組合為彈簧剛度系數500 N/m,主動桿轉速12 r/min,苗盤傾斜角度45°。以最優參數組合進行驗證試驗,結果表明,裝置的平均取投苗成功率為94.44%,其中由于缽苗的生長情況不同,發生了較少的基質破碎,基質破碎率為3.13%,由于取投苗裝置和送苗裝置的配合誤差,發生了較少的缽苗脫落,平均缽苗脫落率為2.43%。
