多航天器協(xié)同探測效能影響參數(shù)不確定性分析
2020-05-21 13:29:00張玉珠牛文龍
宇航學(xué)報 2020年4期
高 辰,楊 震,張玉珠,牛文龍
(1. 中國科學(xué)院國家空間科學(xué)中心,北京 100190;2. 中國科學(xué)院大學(xué),北京 100049)
0 引 言
航天任務(wù)的設(shè)計是一項多學(xué)科融合的復(fù)雜過程[1- 2]。一個空間科學(xué)任務(wù)的概念設(shè)計階段是工程師把科學(xué)家的科學(xué)目標(biāo)工程化論證的過程。通常一個空間任務(wù)系統(tǒng)在總體設(shè)計階段投入的人力和資源只占整個任務(wù)的10%,卻決定了任務(wù)系統(tǒng)80%的生命周期成本[3]。而在設(shè)計過程中,存在大量的不確定性因素[4-5],這些不確定性因素既包括由于認(rèn)知的局限性導(dǎo)致的認(rèn)知不確定性,也有尺寸、測量等精度導(dǎo)致的參數(shù)誤差引起的隨機不確定性。認(rèn)知不確定性通常通過非概率數(shù)學(xué)的方法解決。針對隨機不確定性,根據(jù)研究對象的不同分為靈敏度分析和不確定性分析[6]。其中,靈敏度分析研究的是某一參數(shù)變化時,系統(tǒng)整體性能的改變程度。而不確定性分析研究的是在每一參數(shù)都具有不確定性的情況下,系統(tǒng)整體性能的不確定性的大小。航天任務(wù)概念設(shè)計階段,考慮不確定性在多學(xué)科復(fù)雜系統(tǒng)的優(yōu)化設(shè)計中的影響有助于建立多學(xué)科優(yōu)化特性和性能評價,有著重要的意義[7]。在設(shè)計初期進(jìn)行參數(shù)的不確定性分析可以評估在當(dāng)前的設(shè)計下,能否滿足對科學(xué)目標(biāo)的探測;以分析不同參數(shù)對于探測性能影響程度;進(jìn)而對參數(shù)設(shè)計進(jìn)行優(yōu)化。
隨著航天科技的進(jìn)步,分布式衛(wèi)星系統(tǒng)的應(yīng)用越來越廣闊。在空間科學(xué)任務(wù)中,分布式衛(wèi)星系統(tǒng)可以觀測到以前難以探測的物理現(xiàn)象和天文數(shù)據(jù),使空間探測進(jìn)一步發(fā)展。如歐空局2000年發(fā)射的Cluster II任務(wù)[8]。NASA在2015年3月發(fā)射的對MMS(Magnetospheric Multiscale)任務(wù)[9]。JAXA計劃發(fā)射的SCOPE任務(wù)[10]。國內(nèi)劉振興院士團隊提出的“磁層-電離層-熱層耦合探測計劃”(Magnetospher-Ionosphere-Thermosphere, MIT)[11]。而隨著分布式衛(wèi)星系統(tǒng)在空間科學(xué)任務(wù)中越來越廣泛的應(yīng)用,系統(tǒng)中更復(fù)雜的參數(shù)耦合關(guān)系對不確定性分析提出了更高的要求和挑戰(zhàn)。在Cluster II和MMS任務(wù)中,不確定性參數(shù)的分析工作主要集中在建立分布式衛(wèi)星系統(tǒng)構(gòu)型或其他實際工程參數(shù)的評價方法[12]。目前,在分布式衛(wèi)星系統(tǒng)概念設(shè)計階段,對系統(tǒng)探測效能的不去額定性分析的研究較少。通常都是利用概率統(tǒng)計和數(shù)值模擬的蒙特卡洛方法解決。
航天任務(wù)概念設(shè)計階段不確定性分析具有涉及學(xué)科多、系統(tǒng)函數(shù)表征難、參數(shù)描述粗略和不同任務(wù)間獨特性強的特點[13],航天任務(wù)的不確定性分析主要針對單一學(xué)科[14-15],整體考慮較少。基于不確定性多學(xué)科優(yōu)化設(shè)計的衛(wèi)星總體設(shè)計方法可以提高衛(wèi)星總體設(shè)計質(zhì)量[16]。且因為概念設(shè)計階段是一個需要迭代設(shè)計的過程,減少分析工作的時間具有重要的意義。因此,不確定性分析的需求主要可歸結(jié)為以下四個方面:計算效率高,定性分析為主,普適性強,能夠?qū)ξ粗膮?shù)耦合關(guān)系進(jìn)行識別分析。
針對傳統(tǒng)基于蒙特卡洛仿真的探測效能評價方法中時間效率低,參數(shù)關(guān)系映射單一的問題,本文提出一種基于神經(jīng)網(wǎng)絡(luò)的不確定性分析方法,利用人工神經(jīng)網(wǎng)絡(luò)在擬合回歸分析上的非線性特性,設(shè)計了能夠替代復(fù)雜系統(tǒng)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),在網(wǎng)絡(luò)訓(xùn)練階段,與蒙特卡洛方法相比,能夠通過少量仿真計算結(jié)果作為訓(xùn)練樣本實現(xiàn)模型的收斂。在參數(shù)不確定性分析時,有效反映被替代系統(tǒng)的原有特性。從而避免了基于仿真采樣方法計算量大的問題。并以一個多航天器的天文觀測任務(wù)為背景,進(jìn)行了仿真實驗,并對實驗結(jié)果進(jìn)行了分析對比。實驗結(jié)果證明本文方法在具有更高計算效率的同時具有較高的準(zhǔn)確性。
1 科學(xué)衛(wèi)星任務(wù)設(shè)計中的不確定性描述
執(zhí)行空間科學(xué)任務(wù)的衛(wèi)星,其工作過程看作在沿著軌道運動的過程中,記錄下每個測量點位置姿態(tài)P,時間t,有效載荷的測量值V及其他參數(shù)。以單一衛(wèi)星的探測過程為例,如所圖1所示,衛(wèi)星在t1,t2,t3時刻分別記錄下衛(wèi)星所在的位姿P1,P2,P3,有效載荷探測結(jié)果V1,V2,V3。對于一個空間科學(xué)任務(wù),尤其是對于分布式衛(wèi)星系統(tǒng),其工作過程就是通過對這些時序變量的測量,并結(jié)合合適的計算方法,實現(xiàn)對復(fù)雜物理現(xiàn)象的探測。
圖1 衛(wèi)星探測過程Fig.1 A satellite detection process
但是,在衛(wèi)星的實際運行過程中,因為不確定性的普遍存在,衛(wèi)星的定位定姿,時鐘系統(tǒng),有效載荷都不可避免的存在測量的不確定性。如圖2所示,圖中灰色衛(wèi)星的真實狀態(tài)為,在t1,t2,t3時刻,衛(wèi)星的探測測量值對應(yīng)的為t′1,t′2,t′3,P′1,P′2,P′3和V′1,V′2,V′3。在任一時刻,每次的測量值誤差都不相同,在衛(wèi)星的系統(tǒng)設(shè)計中,通常通過位姿測量精度uP,時鐘精度ut,有效載荷測量精度uV等來描述其統(tǒng)計規(guī)律。
圖2 不確定性參數(shù)影響下的衛(wèi)星探測過程Fig.2 A satellite detection process with uncertainty
在傳統(tǒng)的衛(wèi)星系統(tǒng)分析中,大部分的誤差、靈敏度分析針對的都是在某一時刻t,參數(shù)的具體誤差,如有效載荷的測量誤差ΔV=V′-V,時鐘誤差Δt=t′-t,位姿誤差ΔP=P′-P等,會對系統(tǒng)產(chǎn)生多大的影響。而對于連續(xù)探測過程中,引起這些誤差的不確定性參數(shù)uV,ut,uP的分析較少。如而對于大部分執(zhí)行空間科學(xué)任務(wù)的分布式衛(wèi)星系統(tǒng),因為其探測過程本身是一個基于時間的連續(xù)過程,考慮這些不確定性參數(shù)對于系統(tǒng)的影響對于衛(wèi)星系統(tǒng)早期的設(shè)計工作有著重要的意義。
單一衛(wèi)星的探測過程可以通過下式進(jìn)行描述。
(1)
式中:y為衛(wèi)星系統(tǒng)最終的探測目標(biāo),其通過系統(tǒng)函數(shù)g()求解。g()的參數(shù)為衛(wèi)星系統(tǒng)探測過程中的時序測量結(jié)果,如時間信息序列T,衛(wèi)星位姿信息序列P,有效載荷測量值序列V。因為在實際工程中,誤差的普遍存在,在任意時刻,這些測量值相對于真值始終存在一定偏差。即t′i=ft(ti),P′i=fP(Pi),V′i=fV(Vi)等[17]。根據(jù)這些誤差產(chǎn)生的原因不同,可以確定其對應(yīng)的概率分布。在航天任務(wù)的概念設(shè)計階段,對參數(shù)的不確定性的描述通常是通過標(biāo)量進(jìn)行粗略設(shè)計說明。如定位精度50 m,時鐘精度20 ns等。在實際工程中,對于未指定分布形式的不確定性參數(shù),常用做法是使用高斯分布進(jìn)行描述[18]。在此基礎(chǔ)上,參數(shù)描述如下:
(2)
在探測過程中,當(dāng)這些誤差存在時,系統(tǒng)對探測目標(biāo)的探測結(jié)果y也與理想值yr存在誤差:Δy=y-yr。如何評估在這些不確定性參數(shù)影響下,尤其是在空間多點探測任務(wù)中,Δy的變化規(guī)律,是研究重點。
2 航天任務(wù)的不確定性分析過程
2.1 應(yīng)用背景介紹
在空間分布式多點探測任務(wù)中,每一個航天器都是一個獨立的探測系統(tǒng),而整個任務(wù)的科學(xué)目標(biāo)能否達(dá)成,需要充分利用每個探測系統(tǒng)的測量值。隨著不確定性參數(shù)的增多,整個系統(tǒng)的不確定性分析也變得更加復(fù)雜。以一個多航天器的天文觀測任務(wù)為例,其任務(wù)系統(tǒng)由一個主衛(wèi)星和八個子衛(wèi)星組成,運行軌道為理想的近月軌道。每兩個航天器可構(gòu)成一條觀測基線,隨著軌道進(jìn)動,實現(xiàn)對全天區(qū)的三維觀測[19]。
在此任務(wù)中,被測目標(biāo)為宇宙背景輻射,其成像原理與綜合孔徑微波輻射計類似。其簡化的成像原理如下式:

V(u,v)exp(2πj(uξ+vη))
(3)
2.2 任務(wù)仿真流程設(shè)計
考慮了不確定性參數(shù)之后的仿真流程如圖3所示。
圖3 考慮不確定性參數(shù)的仿真流程Fig.3 Flow chart of the simulation process with uncertainty
如前文所述,考慮的任務(wù)的不確定性參數(shù)主要為衛(wèi)星軌道的定位誤差,有效載荷精度引起的測量可視度函數(shù)的幅值和相位誤差。在正常的仿真流程之外,根據(jù)衛(wèi)星的定位精度,在衛(wèi)星的探測過程中,每次生成帶誤差的定位結(jié)果,進(jìn)而計算出,空間頻域帶誤差的測量基線位置(u′,v′);再根據(jù)有效載荷的精度,對應(yīng)的給測量到的可視度函數(shù)增加噪聲,得到可視度函數(shù)的測量結(jié)果V′(u,v)。根據(jù)新的測量基線(u′,v′)及其對應(yīng)的可視度函數(shù)V′(u,v),計算考慮不確定性參數(shù)的反演圖像T′。
在傳統(tǒng)的綜合孔徑微波輻射計的成像誤差分析中,最常用的定量評估指標(biāo)是均方根差[20-22],通過計算含誤差項的反演結(jié)果與理想反演結(jié)果之間的各像素點的均方差來衡量反演結(jié)果的誤差大小。
其中,對于兩張尺寸同為尺寸的圖像,其均方根差(Root Mean Square Error)的計算方程如下:
(4)
式中:m和n分別為圖像的寬和高,Te(ξ,η)為考慮誤差的成像結(jié)果,Ti(ξ,η)為不考慮誤差情況下的理想成像結(jié)果。這種評價探測反演結(jié)果的好處是均方根差不僅體現(xiàn)了Te(x,y)和Ti(x,y)之間的平均偏差,也包含了隨機噪聲偏差[23]。
3 不確定性分析方法
3.1 傳統(tǒng)蒙特卡洛仿真的分析方法
蒙特卡洛方法是廣泛應(yīng)用的一種計算算法,它的計算過程依賴于重復(fù)隨機采樣來獲取數(shù)值結(jié)果。其基本思想是通過使用隨機性來解決確定性問題[24]。
設(shè)一個系統(tǒng)的函數(shù)描述為:
y=g(x1,x2,…,xn)
(5)
式中:x1,x2,…,xn為這個系統(tǒng)的n維輸入變量,y為系統(tǒng)的輸出。考慮系統(tǒng)輸入變量具有的隨機不確定性條件下,利用蒙特卡洛抽樣仿真方法進(jìn)行系統(tǒng)不確定性分析的方法如下:
1) 根據(jù)n維輸入變量x1,x2,…,xn的聯(lián)合概率分布,生成M個樣本:
(6)
2) 計算對應(yīng)的M個系統(tǒng)響應(yīng)輸出為:
y=[y1,y2, …,yM]T
(7)
3) 對結(jié)果的方差進(jìn)行統(tǒng)計分析,得到系統(tǒng)的無條件方差D:
(8)

蒙特卡洛等概率抽樣方法,其本質(zhì)是通過大量隨機實驗,利用概率論解決問題的一種數(shù)值方法。在不確定性分析中,從其計算流程可以看出,蒙特卡洛方法需要在確定參數(shù)的不確定性的前提下,通過大量仿真計算,得到多次抽樣結(jié)果,再利用統(tǒng)計的方法,給出不確定性分析結(jié)果。其計算精度與仿真重復(fù)計算次數(shù)成正比。根據(jù)大數(shù)定律當(dāng)采樣計算次數(shù)足夠充分時,基于概率統(tǒng)計的蒙特卡洛仿真方法的計算結(jié)果被認(rèn)為最接近真實情況。因此通常選為作為對比的基本方法。而在航天任務(wù)的早期設(shè)計階段,不確定性參數(shù)往往是需要優(yōu)化設(shè)計的指標(biāo),每一組參數(shù)條件都進(jìn)行蒙特卡洛仿真計算時間成本高。同時,蒙特卡洛方法不能給出參數(shù)之間耦合關(guān)系的變化規(guī)律,不利于航天任務(wù)在早期階段進(jìn)一步優(yōu)化設(shè)計。
3.2 神經(jīng)網(wǎng)絡(luò)模型替代的分析方法
本文引入人工神經(jīng)網(wǎng)絡(luò)模型的方法,通過在參數(shù)可行空間能進(jìn)行少量采樣計算的方法作為訓(xùn)練樣本,對神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,用訓(xùn)練后的神經(jīng)網(wǎng)絡(luò)作為復(fù)雜系統(tǒng)的替代模型,改善單獨使用蒙特卡洛方法在航天任務(wù)早期設(shè)計階段的不足。其計算流程如圖4所示。
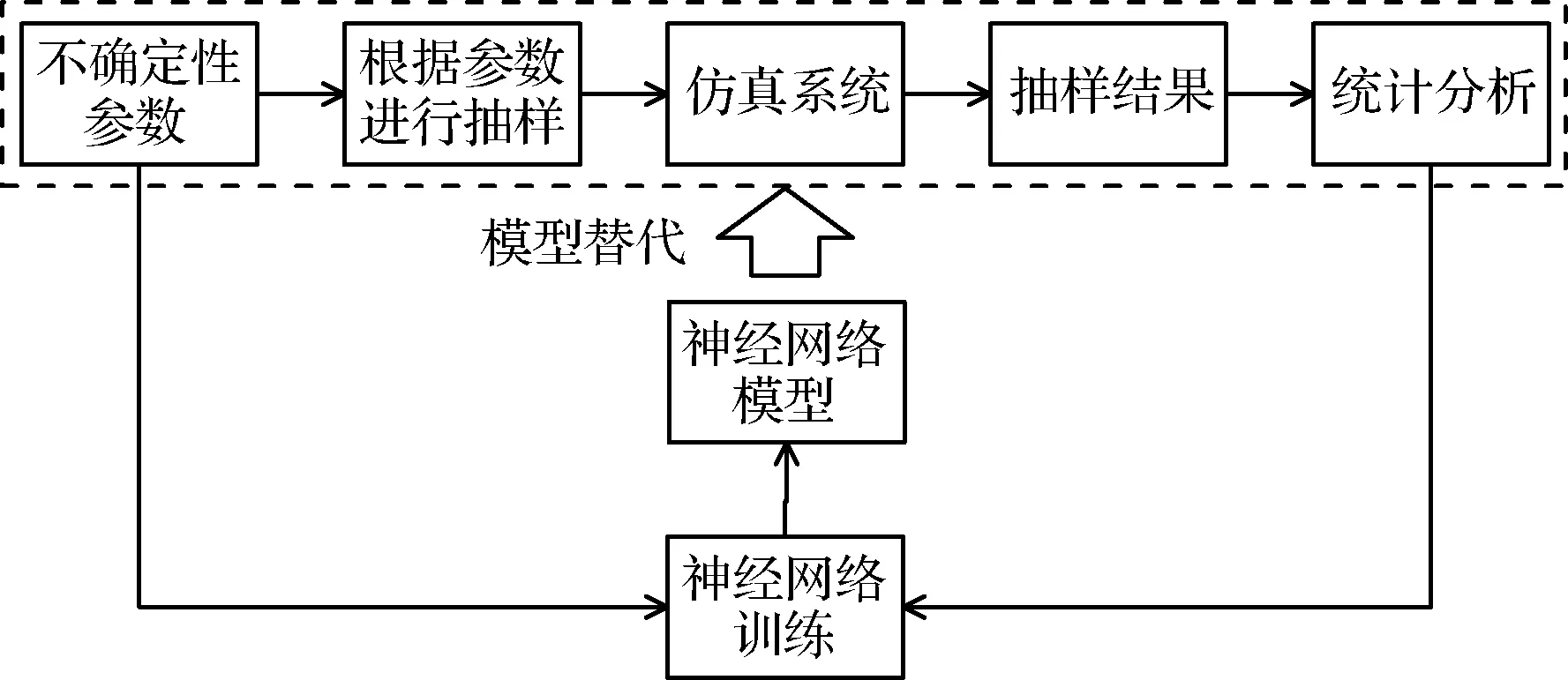
圖4 神經(jīng)網(wǎng)絡(luò)模型替代的分析方法流程Fig.4 Process of neural network model method
4 仿真校驗
4.1 基本仿真參數(shù)配置
為了減少反演算法對結(jié)果的影響,在仿真中依然采用還原質(zhì)量一般的基本線性直接離散二維傅里葉逆變換求解反演圖像[25]。輸入圖像為一張32×32的灰度圖,在圖像中間左側(cè)位置有一矩形明亮區(qū)域,賦值為1,其余區(qū)域的幅值為0。在不考慮任何輸入不確定性參數(shù)的情況下,輸入原始圖像和對應(yīng)算法的反演圖像如圖5所示,其中,左側(cè)為輸入的原始圖像,右側(cè)為不考慮不確定性參數(shù)情況下的反演結(jié)果。
因本文的重點不是對反演算法產(chǎn)生的誤差進(jìn)行評估,固不對反演算法問題做深入探討。
4.2 蒙特卡洛仿真分析結(jié)果
為分析系統(tǒng)在不同參數(shù)不確定性條件下的整體性能不確定性,基于前文中描述的考慮不確定性參數(shù)的仿真環(huán)境,利用蒙特卡洛方法對系統(tǒng)進(jìn)行抽樣仿真分析的參數(shù)精度如表1所示。
表1 蒙特卡洛仿真參數(shù)Table 1 Parameters in Monte Carlo Simulation
其中,衛(wèi)星的定位誤差使用誤差橢球模型[26],即在衛(wèi)星的每一次定位過程中,三維誤差的分布呈橢球狀。在衛(wèi)星位置誤差分析的模型中,通常假設(shè)定位誤差在三個方向均服從相同的高斯分布,即誤差橢球退化為誤差球,誤差球半徑為設(shè)定的標(biāo)準(zhǔn)差。在綜合孔徑微波輻射成像仿真中,通過在可視度函數(shù)的幅值和相位分別增加高斯噪聲來模擬環(huán)境和硬件引起的可視度函數(shù)誤差。因研究重點討論的是不確定性參數(shù)的分析方法,為減少實際工程參數(shù)選擇的影響,單位均使用無量綱,且參數(shù)的數(shù)值范圍保證對最終結(jié)果的影響在同一數(shù)量級。經(jīng)實驗,可視度函數(shù)相位不確定性在0.1時,在不考慮其他參數(shù)的不確定性,系統(tǒng)整體的探測效能的不確定性為0.0068;而可視度幅值誤差不確定性在2.4時,在不考慮其他參數(shù)的不確定性,系統(tǒng)整體的探測效能的不確定性為0.0063;而定位精度不確定性在0.00034時,在不考慮其他參數(shù)的不確定性,系統(tǒng)整體的探測效能的不確定性為0.0068。基于此,衛(wèi)星定位精度參數(shù)的標(biāo)準(zhǔn)差為0~0.0005,可視度函數(shù)的幅值誤差范圍在0~0.25范圍內(nèi),可視度函數(shù)的相位誤差在0~0.15范圍內(nèi)。在具體抽樣方法中,對各維參數(shù)空間均勻采樣50次,即在定位精度的標(biāo)準(zhǔn)差采樣取值間隔為0.00001,可視度函數(shù)的幅值誤差的標(biāo)準(zhǔn)差采樣間隔為0.005,可視度函數(shù)的相位誤差的標(biāo)準(zhǔn)差采樣間隔為0.03,共在參數(shù)空間采樣50×50×50=125000個采樣點。在每組參數(shù)條件下,再利用蒙特卡洛抽樣計算500次,并對結(jié)果求平均值,作為在這組輸入不確定性參數(shù)條件下,系統(tǒng)整體效能不確定性的評價指標(biāo)。蒙特卡洛的部分仿真結(jié)果如圖6所示,其中,圖6(a)在考慮了參數(shù)耦合關(guān)系后的不確定性參數(shù)與結(jié)果的變化趨勢。圖6(b)為兩種參數(shù)誤差的二維示意圖,系統(tǒng)整體效能藍(lán)色代表不確定性誤差為0,黃色代表不確定性誤差增大至約0.012。從中可以看出,兩個參數(shù)之間存在耦合關(guān)系,并非獨立的不確定性參數(shù)。利用蒙特卡洛仿真的方法計算量大,耗時長,在當(dāng)前參數(shù)組合下,需要重復(fù)計算62500000次,且當(dāng)參數(shù)再次變化時,需要再次進(jìn)行計算。
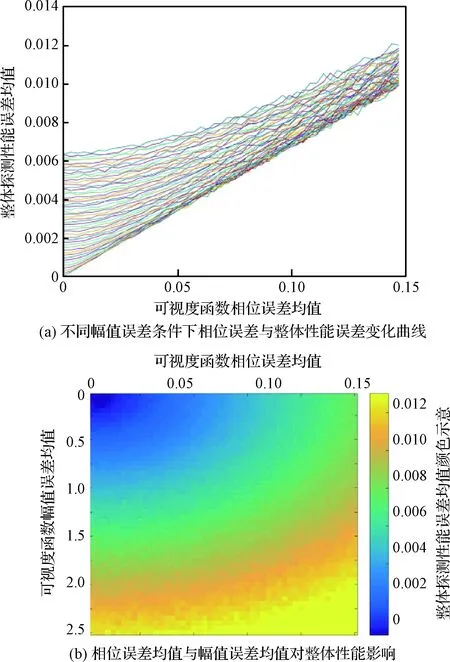
圖6 可視度函數(shù)幅值誤差均值不同時相位誤差 均值與整體性能誤差均值的變化規(guī)律Fig.6 Result from MCS of two coupling parameters
4.3 神經(jīng)網(wǎng)絡(luò)替代模型方法實驗結(jié)果
為減少重復(fù)計算次數(shù),提高系統(tǒng)在設(shè)計階段的設(shè)計效率,本文引入人工神經(jīng)網(wǎng)絡(luò)作為系統(tǒng)模型替代的方法進(jìn)行不確定性分析。
在上節(jié)蒙特卡洛方的基礎(chǔ)上,以可視度函數(shù)幅值誤差和可視度函數(shù)相位誤差作為分析參數(shù)。利用Matlab軟件的神經(jīng)網(wǎng)絡(luò)工具包,構(gòu)建一四層BP神經(jīng)網(wǎng)絡(luò)作為替代模型,神經(jīng)網(wǎng)絡(luò)中有2個隱含層,每一個隱含層有3個節(jié)點,第一個隱含層的激活函數(shù)為tansig函數(shù)。考慮到誤差的描述恒為正值,第二個隱含層激活函數(shù)選擇logsig函數(shù),logsig函數(shù)為對標(biāo)準(zhǔn)sigmoid函數(shù)求對數(shù),可以將(-∞,+∞)的輸入值,映射到[0,1]范圍內(nèi)。輸出層同樣選擇簡單線性函數(shù)purelin。具體網(wǎng)絡(luò)結(jié)構(gòu)如圖7所示。
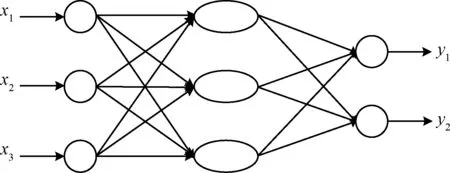
圖7 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)示意圖Fig.7 Structural of neural network model
在進(jìn)行不確定性分析時,因為不確定性的數(shù)值相對較小,為減少對訓(xùn)練過程的影響,需要對數(shù)據(jù)進(jìn)行歸一化處理,其歸一化處理的方法如下:
(9)

在訓(xùn)練樣本選擇時,訓(xùn)練樣本數(shù)量對訓(xùn)練結(jié)果影響如表2所示,可以看出,隨著樣本數(shù)量的增加,對系統(tǒng)的擬合程度也更精確,使神經(jīng)網(wǎng)絡(luò)模型可以更有效逼近原有系統(tǒng)特性。
表2 訓(xùn)練樣本數(shù)量對訓(xùn)練結(jié)果影響Table 2 Mean Square Error of different training samples
在考慮訓(xùn)練穩(wěn)定性和收斂速率后,本文使用的訓(xùn)練樣本為上節(jié)中蒙特卡洛仿真結(jié)果的1/4,即將可視度函數(shù)幅值誤差和相位誤差的取值間隔增大一倍,訓(xùn)練樣本大小為25×25共625個。經(jīng)過106次迭代訓(xùn)練后,與蒙特卡洛50×50的結(jié)果對比如圖8和圖9所示。其中,圖8中‘*’構(gòu)成的曲線為蒙特卡洛仿真結(jié)果,‘o’構(gòu)成的曲線為神經(jīng)網(wǎng)絡(luò)模型替代方法的結(jié)果;圖9為神經(jīng)網(wǎng)絡(luò)模型替代方法結(jié)果的二維示意。
在數(shù)據(jù)歸一化后,2500個實驗樣本的均方誤差約為0.007,在原有數(shù)值區(qū)間均方誤差約為1.23×10-7。可以看出,神經(jīng)網(wǎng)絡(luò)模型替代方法相對于蒙特卡洛仿真的結(jié)果差距不大。而在當(dāng)前實驗條件下,蒙特卡洛仿真計算一組參數(shù)的計算時間約為2 min,計算2500個樣本的時間約為1.5 h。神經(jīng)網(wǎng)絡(luò)模型替代方法的訓(xùn)練樣本生成僅需原蒙特卡洛方法的1/4時間。訓(xùn)練過程約5 min,后續(xù)計算其余時間可忽略。可見整體計算時間效率提升明顯。
圖8 神經(jīng)網(wǎng)絡(luò)模型替代法結(jié)果與蒙特卡洛結(jié)果對比Fig.8 Result comparison of Monte Carlo Method and ANN method
圖9 神經(jīng)網(wǎng)絡(luò)模型替代法結(jié)果與蒙特卡洛結(jié)果對比Fig.9 Comparison between neural network model and MCS
5 結(jié) 論
不確定性分析是航天任務(wù)尤其是空間科學(xué)任務(wù)在早期設(shè)計階段的重要組成部分。參數(shù)的不確定性會影響任務(wù)的科學(xué)目標(biāo)能否滿足,是評價系統(tǒng)整體效能的重要依據(jù)。隨著航天器數(shù)目的增加,空間多航天器協(xié)同探測任務(wù)的不確定性分析復(fù)雜度越來越復(fù)雜。蒙特卡洛仿真分析方法是解決這一難題的主要手段,但其也有時間效率低,不能對參數(shù)之間耦合關(guān)系進(jìn)行有效識別等弊端。
本文利用人工神經(jīng)網(wǎng)絡(luò)在擬合回歸分析上的非線性特性,提出一種基于神經(jīng)網(wǎng)絡(luò)的不確定性分析方法,設(shè)計了能夠替代復(fù)雜系統(tǒng)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),在網(wǎng)絡(luò)訓(xùn)練階段,與蒙特卡洛方法相比,能夠通過少量仿真計算結(jié)果作為訓(xùn)練樣本實現(xiàn)模型的收斂。在參數(shù)不確定性分析時,有效反映被替代系統(tǒng)的原有特性。避免了大量重復(fù)計算。仿真驗證以天文多星觀測成像為背景,通過與蒙特卡洛方法的結(jié)果對比,證明了方法的有效性。為實際多星任務(wù)在早期任務(wù)設(shè)計階段的不確定性分析提供新的解決方案。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
