一種基于物聯網技術的太陽能逐日控制系統設計與實現
2020-05-21 05:54:57孫廨堯
電腦知識與技術 2020年9期
孫廨堯


摘要:為了解決現有太陽能逐日系統控制方式單一問題,給出了一種基于Android移動端的太陽能逐日控制系統。系統運用傳感器、無線傳輸等物聯網技術,舵機組合作為運動平臺,Cortex M3單片機實現智能控制單元,通過NB-IoT模塊將信息發送至云平臺,用戶可通過手機查詢并控制舵機的轉動實現對太陽的追蹤。
關鍵詞:逐日系統;Android:NB-loT
中圖分類號:TP311 文獻標識碼:A
文章編號:1009-3044(2020)09-0287-02
1 前言
隨著時間的推移,人類不得不尋找能源以滿足社會發展。由此不可避免的帶來了能源短缺問題,威脅著人類的可持續發展[1]。幾年前,習總書記對能源“革命”進行了定調,其中,太陽能作為新能源建設的主要部分,已經越來越多的應用到國計民生的各個方面,新能源的引入及應用也越來越廣泛。在世界各國對太陽能研究中,如何利用其發電成為熱點[2]。但是太陽能電池板目前多數還都是固定的,雖然有單軸跟蹤、雙軸跟蹤以及混合式跟蹤等多種追蹤方式以提高光轉換率,但在控制方式上卻比較單一。本文在混合式跟蹤的前提下,提出了一種基于Android的太陽能逐日控制系統。相比較目前在控制室操作的復雜性,用戶只需通過手機即可遠程控制云臺的轉動,實現對太陽的追蹤。操作簡單,易使用。
2 系統方案設計
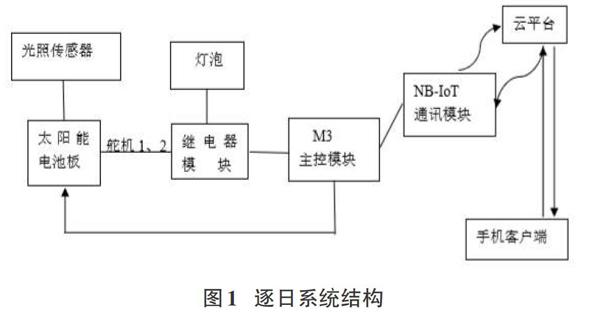
本系統是一套靠光敏傳感器來感知最大強光照度位置,并將太陽能電池板定位到此最佳光照角度的手機移動控制系統。系統利用光敏電阻作為傳感器,兩個舵機組合作為運動平臺,結合NB-IoT通訊將系統相關信息上傳至云平臺,M3單片機實現智能控制單元,燈泡模擬太陽光。在系統上電工作時,控制指令先讓太陽能電池板全局掃描所有方向的光線強度,并定位到最大光照度位置。過程中先操作底部舵機2,再操作頂部舵機1;由于舵機本身性能原因,舵機2只能實現0-1800的角度掃描,舵機1由于云臺的結構及安全的限制,人為設置好安全范圍后,實現600以內的角度掃描。兩個舵機都操作完成后,基本上定位了做大的光源角度點,后續系統就會以此定位點跟隨光源的移動,機械臂跟隨光源移動。手機端能夠通過訪問云平臺獲得光敏傳感器的值及太陽能電池板的角度值,并能手動控制裝置的開啟與關閉、手動控制太陽能電池板的方向。系統結構如圖1所示。
根據需求,手機端能夠進行遠程操作,包括:1)實時獲取光強度信息及舵機1和舵機2的角度值,同時能夠獲取當前實驗平臺上燈泡的開關狀態;2)手機端可以遠程控制舵機l和舵機2的角度值;3)手機端可以遠程控制燈的開與關狀態。整個系統業務流程簡單,輸入用戶名及密碼后,后臺服務器進行登錄判斷,如果登錄失敗,返回錯誤提示信息;登錄成功即可進入系統主控制界面,此界面能夠查看相關設備信息以及控制相關設備。系統流程圖如圖2所示。
4 主要功能展示
4.1 用戶登錄
用戶在云平臺注冊信息后,通過注冊的手機號進行登錄,云平臺會對當前賬號進行校驗,校驗通過后,才允許進行查詢,控制等操作。登錄界面包括用戶名和密碼文本框,以及登錄按鈕。如圖3所示。
4.2 系統主控制界面
軟件界面主要包含以下幾個部分:顯示當前的光照值;控制燈的開啟與關閉;舵機1和舵機2能夠通過自定義滑動選擇器進行舵機角度控制。系統軟件控制效果和硬件連接圖如圖4和圖5所示。
5 結論
本文給出了一種基于Android移動端的太陽能逐日控制系統。詳細設計了硬件組成及軟件實現。并結合NB-IoT通訊模塊,實現了手機訪問云平臺信息并能在手機上調節控制云臺轉動以實現逐日。操作簡單,開拓了應用渠道,為今后其他逐日系統的實現提供了參考價值與思路。
參考文獻:
[1]陳本源,謝淼,錢超.追日型太陽能路燈系統設計[J].計算機與數字工程,2015,43(11):2081-2085.
[2]羅金玲,太陽能電池板自動追日系統[J].電腦編程技巧與維護,2015(22):31-32,37.
【通聯編輯:李雅琪】
基金項目:安徽商貿職業技術學院科研項目“基于物聯網技術的太陽能逐日系統應用研究”(2019KY203)
