扇形回轉(zhuǎn)式自控?cái)r污柵設(shè)計(jì)
2020-05-23 10:51:10劉天為
四川水力發(fā)電 2020年2期
關(guān)鍵詞:結(jié)構(gòu)工程
劉 天 為
(中國(guó)電建集團(tuán)成都勘測(cè)設(shè)計(jì)研究院有限公司,四川 成都 610072)
1 研究背景
攔污柵的功能為阻止植物根莖、生活廢物與工業(yè)垃圾等污物進(jìn)入工程內(nèi)部結(jié)構(gòu),避免上述異物對(duì)建筑物與設(shè)備造成危害。目前攔污柵按結(jié)構(gòu)類型可劃分成平面式和旋轉(zhuǎn)式。平面式攔污柵在工程中一般豎向布設(shè)兩道,當(dāng)發(fā)生污物堵塞現(xiàn)象時(shí),將攔污柵提出門槽進(jìn)行輪流清污。平面式攔污柵清污較為困難,需配備啟閉及清污等專門設(shè)備進(jìn)行污物清除。旋轉(zhuǎn)式攔污柵在柵面上布設(shè)清污齒,利用清污齒的轉(zhuǎn)動(dòng)來(lái)清理污物。因河流中各類異物來(lái)源多樣及型式多種,清污齒的大小難以確定,清污齒的轉(zhuǎn)動(dòng)容易被污物堵塞卡死,進(jìn)而導(dǎo)致清污設(shè)備停機(jī)清理[1]。
由于河道中異物數(shù)目及尺寸難以準(zhǔn)確預(yù)估與控制,進(jìn)水口上游匯集的異物難以及時(shí)得到有效清除,攔污設(shè)施被堵塞現(xiàn)象常有發(fā)生,將造成下列后果:攔污柵上下游側(cè)的水位差逐漸增大,進(jìn)而降低水利水電工程的出力與效率;柵前污物逐漸堆積,柵面有效過(guò)水面積減小,柵前污物在水流推力作用下不斷撞擊攔污柵,導(dǎo)致攔污柵的變形及損壞;若發(fā)生嚴(yán)重堵塞現(xiàn)象將導(dǎo)致水電站被迫停機(jī)清污,影響工業(yè)生產(chǎn)、居民用電及電站效益[2-3]。
2 工程現(xiàn)狀與研究進(jìn)展
目前我國(guó)完建運(yùn)行的水利水電工程,已發(fā)生多例攔污設(shè)施被嚴(yán)重堵塞現(xiàn)象。針對(duì)各類水利水電工程的不同結(jié)構(gòu)布置特征,研究人員根據(jù)實(shí)際情況因地制宜地采用了多種處理措施,但效果有限且操作較為復(fù)雜。瀾滄江功果橋水電站采用岸塔式進(jìn)水口與平面式攔污柵,運(yùn)行僅5年即發(fā)生柵前污物嚴(yán)重堆積現(xiàn)象,導(dǎo)致機(jī)組部件磨損并嚴(yán)重影響電站的平穩(wěn)運(yùn)行。為解決功果橋柵前淤積問題,謝文明[4]采用了上游庫(kù)區(qū)清漂、增加清污頻率并改造攔污柵門槽混凝土結(jié)構(gòu)等措施。浙江省趙山渡水電站采用河床式發(fā)電廠房,因柵前污物堆積現(xiàn)象日益嚴(yán)重且難以得到有效清理,電站的引用流量與利用水頭受到較大影響,導(dǎo)致水輪發(fā)電機(jī)組的實(shí)際出力僅為設(shè)計(jì)值的50%左右,闕劍生等[5]必須對(duì)取水與攔污結(jié)構(gòu)進(jìn)行改造,并在水庫(kù)上游增加了清漂與攔污設(shè)備。福建省古田溪梯級(jí)水電站采用河岸斜坡式進(jìn)水口與傾斜布置攔污柵,運(yùn)行僅4年即發(fā)現(xiàn)攔污柵被植物根莖與枝干挾裹泥沙堵死,攔污柵上下游側(cè)的最大水位差達(dá)到了4.4 m,攔污柵上的柵片與結(jié)構(gòu)梁發(fā)生嚴(yán)重彎曲變形。古田水電站停機(jī)清污后的效果維持時(shí)間不到2年,攔污設(shè)施被嚴(yán)重堵塞現(xiàn)象再次發(fā)生。針對(duì)上述問題,何乃珍[6]對(duì)攔污設(shè)施采取臨時(shí)加固措施、定期更換攔污柵并在后期采用梯級(jí)電站系統(tǒng)調(diào)度運(yùn)行與建立即時(shí)監(jiān)測(cè)系統(tǒng)。根據(jù)工程調(diào)研與文獻(xiàn)歸納,攔污柵前污物匯集且較難清除的現(xiàn)象在各類水利水電工程中較為常見且較難解決。
為解決上述問題,針對(duì)攔污柵的結(jié)構(gòu)布置設(shè)計(jì)及攔污清污效果,目前已有部分學(xué)者進(jìn)行了系列研究并取得一定進(jìn)展。李勝等[7]等研究了傳統(tǒng)平面直立式攔污柵與液壓式清污耙斗的結(jié)構(gòu)布置及設(shè)計(jì)。任玉珊等[8]針對(duì)已投產(chǎn)運(yùn)行項(xiàng)目發(fā)生攔污柵柵前污物堵塞的現(xiàn)象,通過(guò)水工模型試驗(yàn)探討了攔污柵堵塞程度與水頭損失的關(guān)系。張多鋒等[9]系統(tǒng)性研究了攔污柵前污物匯集的力學(xué)影響并對(duì)攔污柵與水面的傾角提出優(yōu)化建議。但針對(duì)攔污、集污、清污的全過(guò)程解決方案,目前學(xué)術(shù)界在這方面的研究較少。本文提出一種集攔污、集污、清污功能于一體,能夠解決攔污柵堵塞現(xiàn)象的扇形回轉(zhuǎn)式自控?cái)r污柵設(shè)計(jì)方案,可供工程設(shè)計(jì)人員參考。
3 扇形回轉(zhuǎn)式自控?cái)r污柵結(jié)構(gòu)及工作原理
3.1 攔污柵的結(jié)構(gòu)型式
扇形回轉(zhuǎn)式自控?cái)r污柵的工程平面布置見圖1。扇形攔污柵位于取水建筑物上游側(cè),其動(dòng)力裝置設(shè)置于閘墩上。攔污柵兩側(cè)閘墩高于洪水位,動(dòng)力裝置的運(yùn)行不受水位漲落的影響。在扇形攔污柵上游與下游位置,布置柵差監(jiān)測(cè)系統(tǒng)來(lái)控制攔污柵運(yùn)行。在扇形攔污柵的下游方向,設(shè)置工作橋及傳送皮帶,方便污物的及時(shí)處理。
扇形回轉(zhuǎn)式自控?cái)r污柵由豎直攔污柵和扇形攔污柵組成,扇形攔污柵又分為機(jī)動(dòng)清污斜面網(wǎng)和擋污扇面網(wǎng)。扇形攔污柵頂部由一根高強(qiáng)度的動(dòng)力軸貫穿固定,動(dòng)力裝置可通過(guò)控制動(dòng)力軸的轉(zhuǎn)動(dòng)來(lái)控制攔污柵的回轉(zhuǎn)。攔污柵具體結(jié)構(gòu)型式詳見圖2。
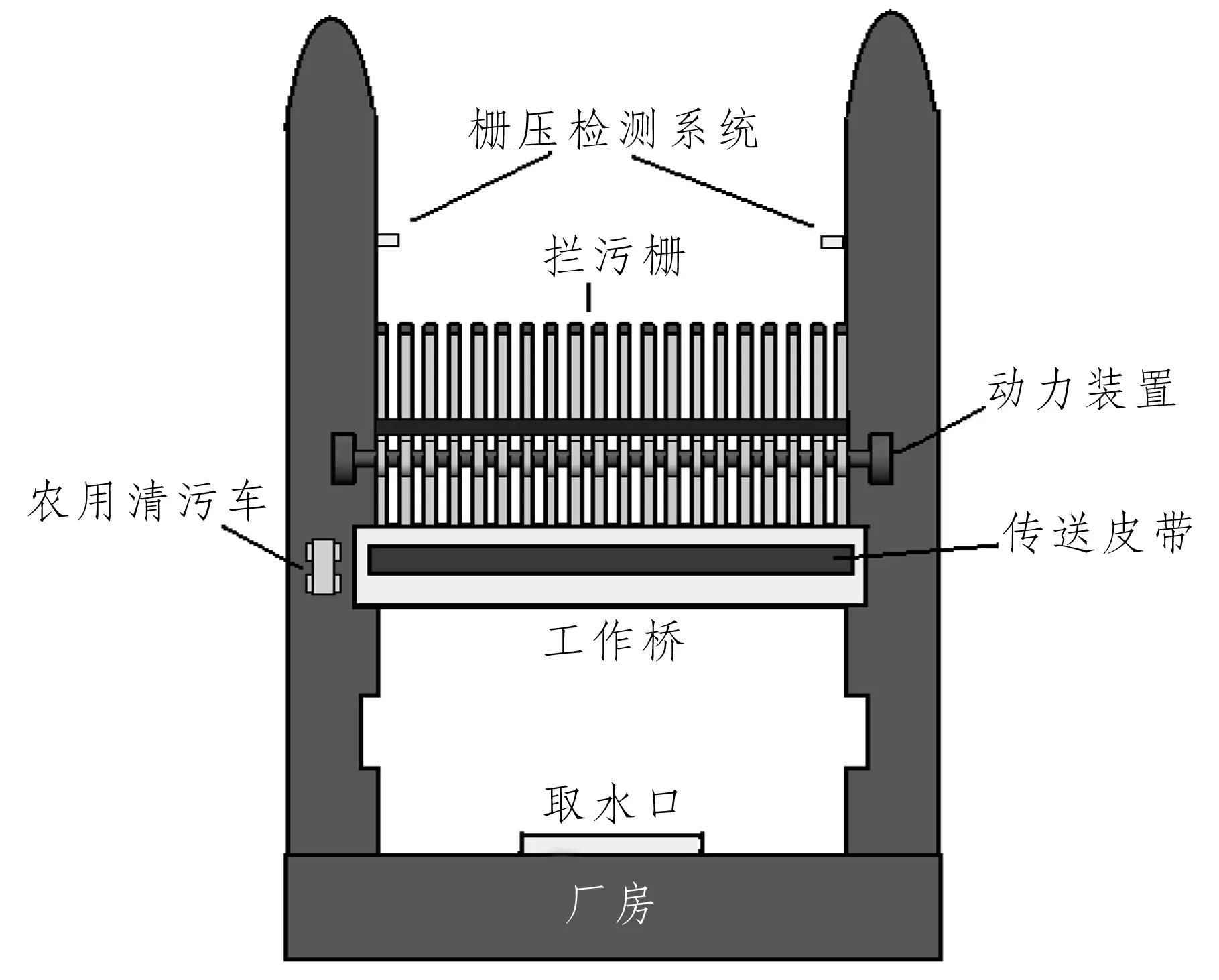
圖1 扇形回轉(zhuǎn)式自控?cái)r污柵平面圖

圖2 扇形回轉(zhuǎn)式自控?cái)r污柵結(jié)構(gòu)圖
3.2 攔污柵的工作原理
扇形回轉(zhuǎn)式自控?cái)r污柵的作業(yè)原理如下:
(1)攔污柵柵前污物主要為漂浮物并匯集于水流表面。豎直攔污柵位于進(jìn)水口上游側(cè)最低水位以下,機(jī)動(dòng)清污斜面網(wǎng)與水流表面成一定緩傾角。利用水流沖力,使水中污物主要匯集在機(jī)動(dòng)清污斜面網(wǎng)上。扇形回轉(zhuǎn)式攔污柵的攔污與集污工作原理見圖3。
(2)當(dāng)污物在機(jī)動(dòng)清污斜面網(wǎng)上匯集到一定數(shù)量時(shí),工作人員可通過(guò)機(jī)械控制清污斜面網(wǎng)的順時(shí)針上揚(yáng)來(lái)清理污物。清污工作原理見圖4。
(3)在順時(shí)針上揚(yáng)斜面網(wǎng)進(jìn)行清污的過(guò)程中,擋污扇面網(wǎng)與豎直攔污柵始終呈良好的相切關(guān)系,既防止污物在斜面網(wǎng)順時(shí)針上揚(yáng)過(guò)程中掠過(guò)攔污柵,又可保障機(jī)組正常運(yùn)行所需流量。清污工作原理見圖5。

圖3 攔污與集污工作原理圖
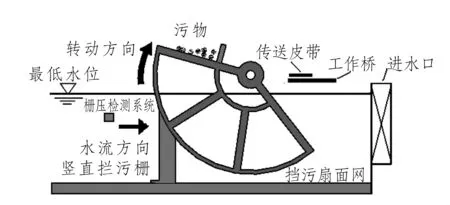
圖4 清污工作原理(步驟1)
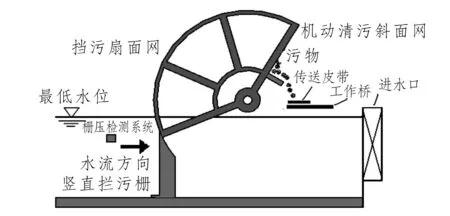
圖5 清污工作原理(步驟2)
扇形回轉(zhuǎn)式自控?cái)r污柵的攔污、集污與清污效果高效、經(jīng)濟(jì)、徹底,提高了工程的運(yùn)行效率與經(jīng)濟(jì)效益。
4 自控清污工作流程
為實(shí)現(xiàn)扇形回轉(zhuǎn)式攔污柵的自動(dòng)控制,滿足不同工作情景下的多種功能需求,本文進(jìn)一步提出扇形回轉(zhuǎn)式攔污柵的自動(dòng)化作業(yè)工作系統(tǒng)。扇形回轉(zhuǎn)式攔污柵的自動(dòng)控制系統(tǒng)主要由監(jiān)測(cè)模式、作業(yè)模式、報(bào)警模式、檢修模式組成,其具體工作流程如下:
(1)監(jiān)測(cè)模式。在水利水電工程運(yùn)行期間,扇形回轉(zhuǎn)式自控?cái)r污柵處于監(jiān)測(cè)模式狀態(tài)。利用柵差自動(dòng)監(jiān)測(cè)系統(tǒng)來(lái)計(jì)算柵前與柵后的水面高程,進(jìn)而推算柵前污物的堆積數(shù)量及情況。
(2)作業(yè)模式。當(dāng)柵前污物匯集程度達(dá)到程序設(shè)定閾值,系統(tǒng)自動(dòng)啟動(dòng)清污作業(yè)模式。當(dāng)扇形回轉(zhuǎn)式自控?cái)r污柵開始繞高強(qiáng)度動(dòng)力軸順時(shí)針旋轉(zhuǎn)時(shí),清污傳送皮帶開始傳動(dòng)。
(3)報(bào)警模式。當(dāng)發(fā)生柵前污物嚴(yán)重堆積、攔污柵動(dòng)力系統(tǒng)發(fā)生故障、攔污柵轉(zhuǎn)動(dòng)意外受阻等現(xiàn)象時(shí),系統(tǒng)啟動(dòng)報(bào)警模式。
(4)檢修模式。在攔污柵系統(tǒng)需要在進(jìn)行保養(yǎng)、維護(hù)及檢修狀態(tài)下使用時(shí),保障攔污柵系統(tǒng)的運(yùn)行穩(wěn)定及使用壽命。
扇形回轉(zhuǎn)式攔污柵的自控清污工作流程見圖6。
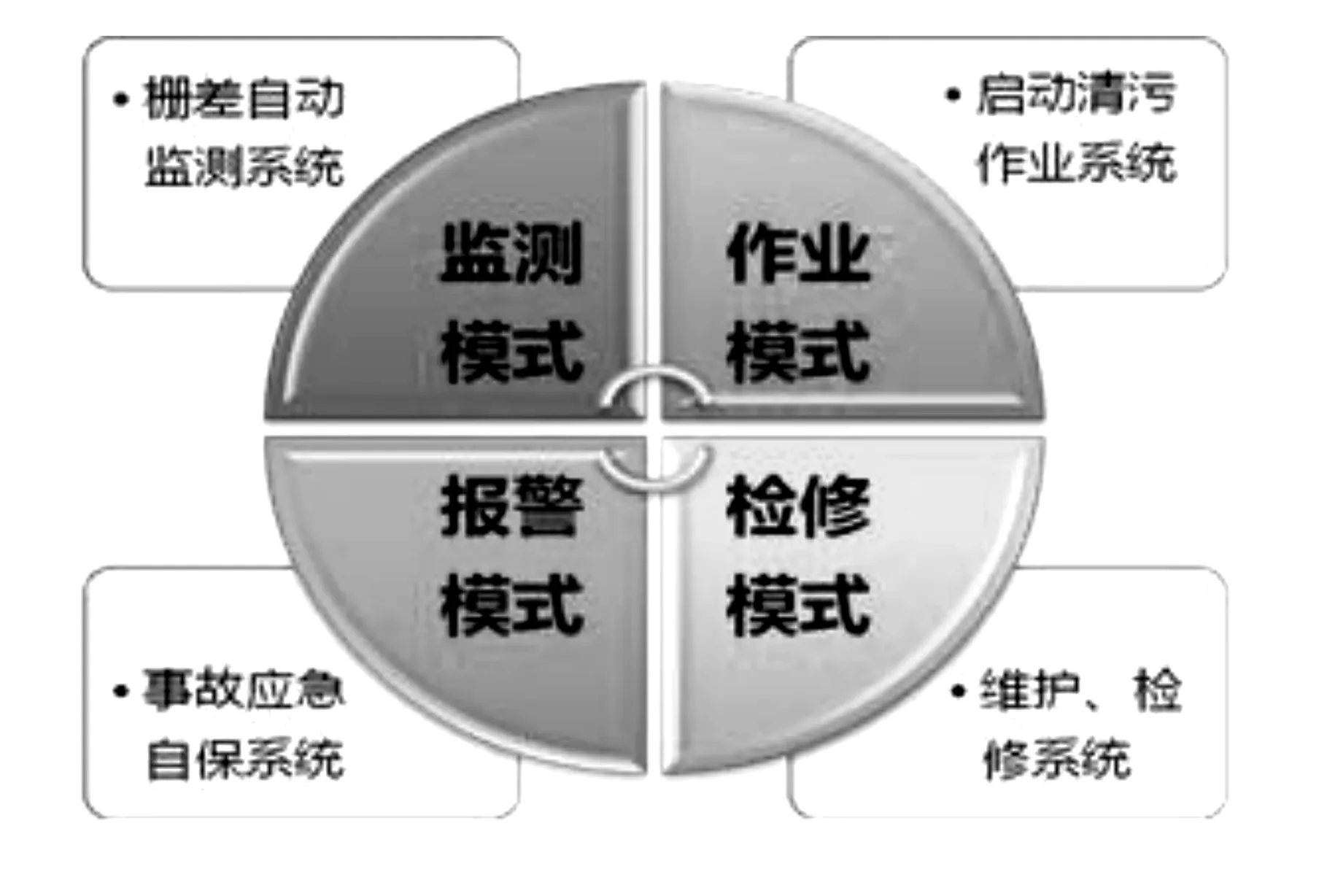
圖6 自控清污工作流程示意圖
5 創(chuàng)新特色及工程應(yīng)用
扇形回轉(zhuǎn)式自控?cái)r污柵不同于現(xiàn)有攔污柵的單一結(jié)構(gòu)型式,將豎直結(jié)構(gòu)和扇形結(jié)構(gòu)合為一體,加載自動(dòng)控制工作系統(tǒng),創(chuàng)新特色及工程應(yīng)用在于:
(1)結(jié)構(gòu)創(chuàng)新。不同于傳統(tǒng)平面直立式攔污柵,扇形回轉(zhuǎn)式自控?cái)r污柵由豎直攔污柵、機(jī)動(dòng)清污斜面網(wǎng)和擋污扇面網(wǎng)組成。
(2)利用水流沖力集污。在水流沖力的作用下,利用機(jī)動(dòng)清污斜面網(wǎng)與河道水面形成的緩傾角,使污物自動(dòng)匯集于機(jī)動(dòng)清污斜面網(wǎng)上。
(3)清污不停機(jī)。清污過(guò)程中擋污扇面網(wǎng)始終與豎向攔污柵保持良好的相切關(guān)系。污物無(wú)法翻過(guò)攔污柵,攔污柵在清污的同時(shí)能正常過(guò)水,停機(jī)清污的頻率得到極大降低,進(jìn)而保障機(jī)組正常運(yùn)行發(fā)電。
(4)自動(dòng)控制化。加載監(jiān)控、作業(yè)、報(bào)警及檢修的自動(dòng)控制系統(tǒng),配備污物運(yùn)輸皮帶、柵面前后水位感應(yīng)系統(tǒng)等自控設(shè)備,減少人工作業(yè)并提高運(yùn)行穩(wěn)定性。
(5)應(yīng)用面廣。扇形回轉(zhuǎn)式自控?cái)r污柵能夠應(yīng)用于各類在建的水利工程和已投入運(yùn)行但清污功能欠佳的水利工程。
6 結(jié) 語(yǔ)
攔污柵在工程運(yùn)行中易于產(chǎn)生污物柵前匯集現(xiàn)象且較難清除,因此,筆者對(duì)攔污柵的結(jié)構(gòu)形式進(jìn)行創(chuàng)新設(shè)計(jì)。根據(jù)扇形回轉(zhuǎn)式自控?cái)r污柵結(jié)構(gòu)及工作原理,筆者提出一種集攔污、集污、清污功能于一體,加載自動(dòng)控制系統(tǒng),能夠解決攔污柵堵塞現(xiàn)象的扇形回轉(zhuǎn)式自控?cái)r污柵設(shè)計(jì)方案。扇形回轉(zhuǎn)式自控?cái)r污柵清污方便及時(shí),能更好保障工程運(yùn)行,降低了停機(jī)清污的可能性,提高工作效率,保證了攔污柵的工作平穩(wěn)性,具有較為顯著的工程實(shí)用價(jià)值與經(jīng)濟(jì)效益。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
太空探索(2016年6期)2016-07-10 12:09:06
筑路機(jī)械與施工機(jī)械化(2015年11期)2015-07-01 16:28:43
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
筑路機(jī)械與施工機(jī)械化(2015年8期)2015-01-11 09:24:54
筑路機(jī)械與施工機(jī)械化(2014年4期)2014-03-01 02:58:34
筑路機(jī)械與施工機(jī)械化(2014年3期)2014-03-01 02:58:01