可變摩擦力觸感移動終端的漢語盲文編碼設計
2020-05-25 03:00:48褚少微吉娜燁
工程設計學報 2020年2期
張 帆,褚少微,吉娜燁
(浙江傳媒學院媒體工程學院,浙江杭州310018)
現行Braille點盲文編碼方法是一種應用廣泛的盲文編碼方案,由法國人Braille 發明。該方法通過在盲文紙上標記凸點(raised dot)來實現文字的編碼和摸讀。Braille盲文由3行2列的6個盲文點位(position of dot)組成,稱為一個盲文方,簡稱為方(cell)。
現行漢語盲文是以Braille盲文為基礎的拼音制盲文體系,其中聲母和韻母各采用1 個盲文方來表示。2018 年7 月1 日實施的《國家通用盲文方案》規定:通用盲文沿用現行盲文的聲母和韻母,增加聲調強制編碼,即一般采用3個盲文方編碼1個漢字。通用盲文方案摒棄了“一般不標調”規則,解決了閱讀盲文時需猜測讀音的問題,提高了漢語盲文的表意功能,可為盲文信息化、盲文無障礙交流提供保障,從而大力促進盲文教育、文化事業的發展[1-2]。
筆者擬提出3種基于可變摩擦力觸感的移動終端漢語盲文編碼方法。利用裝有可變摩擦力觸感裝置的移動終端,參考《國家通用盲文方案》,對漢語盲文進行編碼設計,實現漢語盲文的觸感摸讀,并對盲文編碼方法進行優化,使它更適用于移動終端的盲文摸讀交互。
本文主要工作包括:
1)提出3種基于可變摩擦力觸感的移動終端通用漢語盲文編碼方法。
2)提出新的盲文觸感摸讀交互方式。
3)對所提出的3種編碼方法進行摸讀效率、摸讀準確率和用戶滿意度的可用性評估。
1 相關研究
在移動終端上表達盲文是一件具有深刻現實意義但又具有挑戰性的工作。目前,對盲文表達的研究主要集中在利用振動馬達來實現不同盲文信息的編碼和交互方法上,如:
Al-Quadah等[3]提出了利用振動韻律對盲文進行摩斯電碼編碼的方法,可使平均閱讀速度達到855 ms/字符。該方法的優點是適用性強,可在帶有振動馬達的移動終端上應用;但其不足之處在于摸讀準確率只有71%,同時需要盲人熟悉摩斯電碼的編碼方式,學習難度較大,此外由于采用的是被動式觸覺感知方式,要求盲人對振動的頻率、時長和韻律等有較敏銳的判斷,且易產生觸感疲勞,用戶體驗效果不佳。
褚少微等[4-5]提出了通過指尖在屏幕上左右滑動、向右滑動、向下滑動三種盲文觸感摸讀的交互方式,利用驅動振動馬達的振動對盲文進行編碼,該方法將盲文的平均識別速度提高到3.62~4.09 s/漢字,3種方式的平均準確率分別達到98.1%,98.1%和96.9%。但是,這些方法的編碼方式與現行盲文的空間分布樣式區別較大,需要用戶進行較長時間的學習和適應。
Jayant等[6]提出了V-Braille方法,該方法采用空間觸感編碼和振動馬達相結合的方式,通過對智能終端屏幕進行區域劃分,實現與6點盲文空間位置一一對應。用戶指尖在觸摸不同區域時,設備會根據盲文點位產生振動反饋,從而實現盲文的摸讀。該方法的編碼方式與現行盲文在空間分布上相同,而且是基于主動式的觸覺反饋,因此易于學習和摸讀。然而該方法的缺陷在于字符閱讀效率較低,平均需要4.2~26.6 s來感知一個盲文,而且由于只能產生振動和不振動兩種狀態,所以對于漢字音標來說,需要用額外的盲文來表征。
Rentala等[7]首次提出了利用壓電傳感器和觸屏智能終端相結合的方法來實現盲文觸感摸讀,基于振動強度、頻率和韻律等對盲文點進行編碼,用戶通過在屏幕上滑動手指來觸發屏幕振動,以達到摸讀盲文的目的。但此種方法需要對智能終端進行特殊改造,設備成本較高,較難推廣,且其平均識別正確率只有70%。
Oliveira 等[8]和Southern 等[9]同樣采用屏幕空間劃分和振動馬達相結合的方式來進行盲文摸讀研究,但他們主要關注的是盲文的輸入方式。
研究表明,高頻率條件下振幅可變的超聲震蕩波作用在物體表面上即可產生可變滑動摩擦力觸感[10-12]。Mullenbach[12-15]等將該原理運用到移動終端的觸摸屏上,根據指尖在屏幕位置上的圖像紋理樣式動態調節超聲波振幅,從而改變指尖與屏幕接觸面的摩擦系數,實現可編程、可控的可變摩擦力滑動觸感的產生,并基于該技術設計了Tpad裝置,實驗證明該裝置能表征很多觸感紋理樣式。與傳統振動馬達對比,Tpad裝置可為移動終端提供更豐富的紋理觸感,使得在移動終端上實現更復雜的信息觸感編碼。此外,Tpad裝置可作為移動終端的一個外接模塊,直接裝配在現有的智能手機上,通過Type-C 接口與智能手機直接進行通信,不需要對手機進行特殊改造。
可變摩擦力觸感通常采用可視化的觸感紋理來表征,一般情況下,用黑色觸感紋理表征最大強度的摩擦力觸感(即屏幕振動幅度為0),用白色觸感紋理表征最小強度的摩擦力觸感(即屏幕振動幅度最大),用灰度觸感紋理表征強度介于最大與最小之間的摩擦力觸感。如圖1所示,當手指在屏幕上滑動時,可感知不同位置的滑動摩擦力。
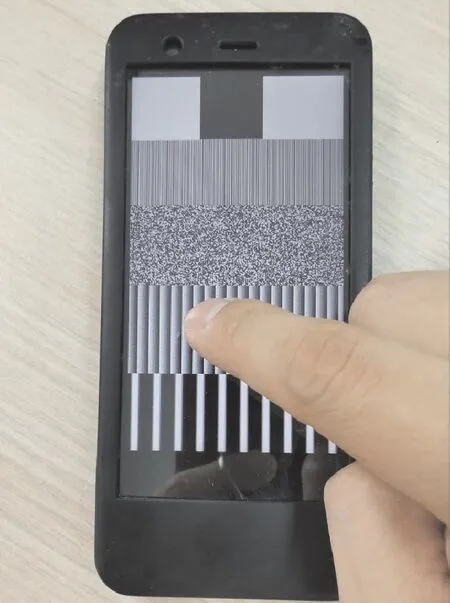
圖1 觸感紋理感知Fig.1 Tactile texture perception
在文獻[16]中,摩擦力觸感紋理強度等級分為36個等級,摩擦力最強的等級為35級,摩擦力最小的等級為0級,若2種紋理的摩擦力觸感強度對應的等級差超過15級,則它們較易被用戶區分。因此,挑選出具有高區分度的條形觸感紋理樣式,分別為純白色紋理和黑白條紋寬度為0.2,1.5 和3.2 mm 的條形觸感紋理,如圖2所示,其摩擦力觸感強度等級分別為0,33,16和4級。
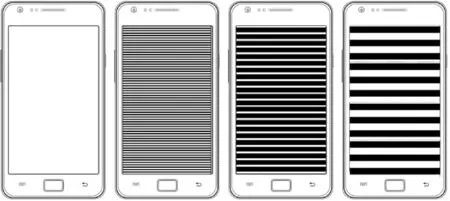
圖2 4種區分度高的觸感紋理Fig.2 Four highly distinguishable tactile textures
文獻[17-18]利用上述條形觸感紋理對阿拉伯數字進行了觸感編碼和相應摸讀交互方法的研究,并提出了基于該技術的盲文編碼設計準則,結果表明利用TPad裝置可進行信息編碼,但此種編碼方式與現行盲文的編碼方法區別較大,交互時間較長。因此,本文仍基于可變摩擦力觸感技術,但采用更貼近現行國家通用盲文編碼方案的編碼方式。
2 漢語盲文的編碼方法
利用屏幕分割方式,把1個盲文方呈現在一個屏幕上,即把裝有可變摩擦力觸感裝置的移動終端屏幕劃分為左右對稱的2 個等分區域(2 列),再把左右2個區域均等分為3行或4行。每個區域代表不同的盲文點位,有觸感紋理的區域代表盲文的凸點,白色紋理的區域代表盲文的凹點。具體交互方式為:用戶通過手指在屏幕的左側和右側滑動來感知屏幕紋理的觸感,實現盲文方的識別;當識別完成一個盲文方后,在屏幕右側快速雙擊屏幕切換到下一個盲文方;上邊界和下邊界分別為屏幕的上邊框和下邊框,如需切換回上一個盲文方,則在屏幕左側快速雙擊屏幕。
提出3 種編碼方法:第1 種方法是按照《國家通用盲文方案》進行編碼,第2種和第3種方法是對第1種方法的改進。
2.1 通用盲文編碼方法
《國家通用盲文方案》規定,按照Braille 盲文的標準,漢字的聲母、韻母以及聲調各用1個盲文方(3行2列)表示。如圖3所示,在通用盲文編碼方法中,盲文凸點采用黑白相間條形觸感紋理表示,條紋寬度為0.2 mm,盲文凹點采用白色觸感紋理表示,其中圖3(a)為《國家通用盲文方案》中漢語拼音“bian”的編碼,圖3(b)為對應漢語拼音在屏幕上的盲文觸感紋理編碼。

圖3 基于通用盲文編碼方法的“bian”的編碼Fig.3 Code of“bian”based on general Braille encoding method
2.2 聲調嵌入編碼方法
由于漢語拼音有4種音調,使用2個點位,共4種組合來進行聲調編碼。由韻母的通用盲文編碼方案可知,1個韻母至少使用2個凸點,因此可把聲調(4種聲調)信息嵌入韻母位置上。陰平聲調采用寬度為0.2 mm 的黑白相間條形觸感紋理;陽平聲調采用寬度為1.5 mm 的黑白相間條形紋理,替代表示韻母的盲文方的第1 個凸點;上聲聲調采用寬度為1.5 mm的黑白相間條形觸感紋理,替代表示韻母的盲文方的第1 個凸點和第2 個凸點;去聲聲調采用寬度為3.2 mm的黑白相間條形觸感紋理,替代表示韻母的盲文方的第1個凸點。該編碼方式可將原來需要3個盲文方的拼音改用2個盲文方表示。以韻母“ian”為例,如圖4所示,從左至右分別表示“ian”的陰平、陽平、上聲和去聲四個聲調。

圖4 基于聲調嵌入編碼方法的“ian”的聲調編碼Fig.4 Tone code of“ian”based on tone embedding encoding method
2.3 4行2列編碼方法
把屏幕平均劃分為4 行2 列的8 個區域,前3 行代表標準的Braille 盲文編碼,觸感紋理仍采用寬度為0.2 mm 的黑白相間條形觸感紋理,最后一行的2個點位用于聲調編碼,采用寬度為1.5 mm 的黑白相間條形觸感紋理,稱之為聲調紋理。其中:陰平聲調是在2個聲調點位均放置白色紋理;陽平聲調是在第1 個聲調點位放置1 個聲調紋理,在第2 個聲調點位放置白色紋理;上聲聲調是在第1個聲調點位放置白色紋理,第2個聲調點位放置1個聲調紋理;去聲聲調是在2 個聲調點位各放置1 個聲調紋理。如圖5 所示,從左至右分別表示“ian”的陰平、陽平、上聲和去聲四個聲調。

圖5 基于4行2列編碼方法的“ian”的聲調編碼Fig.5 Tone code of“ian”based on four-lines two-columns encoding method
3 編碼方法可用性評估
對提出的3種盲文編碼方法進行可用性評估,共開展2次系統實驗:實驗1,分別從摸讀效率、摸讀準確率以及用戶滿意度三個方面對本文提出的3種盲文編碼方法進行量化測試評估;實驗2,挑選出實驗1中綜合得分最高的方法,與褚少微等[4]提出的基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法進行對比。
3.1 實驗1
從摸讀效率、摸讀準確率以及用戶滿意度三個方面對通用盲文方案編碼方法、聲調嵌入編碼方法和4行2列編碼方法進行可用性量化測試評估。
3.1.1 實驗1設備
實驗采用客戶端/服務器(C/S)架構,1 臺搭載Android系統的TPad移動終端作為客戶端(屏幕尺寸為4.7英寸(11.938 cm),分辨率為720×1 280像素),1臺Android平板電腦作為服務器端,客戶端和服務器端通過藍牙進行網絡通信。
服務器端用于生成漢字對應的盲文觸感紋理編號并發送到客戶端,客戶端根據觸感紋理編號生成相應盲文觸感紋理并呈現在屏幕上,用戶用手指在TPad屏幕上滑動并感知相應位置的紋理觸感。服務器端根據用戶在客戶端的摸讀時間,實時記錄每個漢字的識別時間。
3.1.2 實驗1受試者
邀請12 名盲人作為受試者,6 名為男性,6 名為女性,平均年齡為27.6歲(標準差為0.6歲)。所有受試者均有通用盲文摸讀經驗,但未使用過TPad設備。每位受試者將得到100元的報酬。
3.1.3 實驗1過程
將12名受試者隨機劃分為3組,每個小組4人,每個小組均用3種方法進行測試。為減小實驗順序對實驗的影響,采用拉丁方設計(Latin square design)平衡實驗順序。
在實驗開始前,實驗人員先向受試者介紹實驗設備、編碼方式以及實驗目標,并讓受試者在TPad設備上感受和熟悉寬度分別為0.2,1.5,3.2 mm 的黑白相間條形紋理的觸感。在測試每種編碼方法前,允許受試者對相應編碼方法進行練習,熟悉每種編碼的觸感紋理,練習時間為10~15 min。
實驗開始后,服務器端隨機生成漢語拼音的觸感紋理樣式(每種編碼方法隨機生成10個漢字,每個已選漢字在每種方法測試過程中隨機出現3次)并發送至客戶端,受試者用手指在TPad屏幕上滑動以感知盲文。在完成識別后,向實驗人員讀出所識別的拼音,實驗人員在服務器端屏幕上選擇正確與否,并將它記錄在服務器端的日志中。同時,當受試者滑動屏幕進行摸讀識別時,客戶端會記錄受試者開始摸讀的時間以及識別完成的時間,并發送至服務器端,保存在日志中,用于計算摸讀的交互時間。實驗過程中始終保持周圍環境安靜,并為受試者戴上隔音耳機。實驗現場如圖6所示。

圖6 盲文摸讀實驗現場Fig.6 Braille reading experiment site
每種編碼方法的測試總次數為10×3×12=360次,則3種方法共計測試360×3=1 080次。每個小組的實驗過程共持續約50 min,每位受試者在每個方法測試結束后休息5 min。實驗結束后受試者在實驗人員幫助下填寫5分制李克特量表(Likert scale)[19],對3種編碼方法進行主觀評價。
3.1.4 實驗1結果
分別從摸讀效率、摸讀準確率和用戶滿意度三個方面對3種編碼方法進行可用性評估,其中:摸讀效率為每個受試者平均摸讀一個漢字所需時間;摸讀準確率用于衡量每種編碼方法的平均識別正確率;用戶滿意度用于調查用戶對每種編碼方法的主觀滿意度,包括學習難易程度、易用性、舒適度以及整體評價。
1)摸讀效率。
圖7 所示為3 種編碼方法的摸讀效率,其中,通用盲文編碼方法的平均摸讀效率為8.82 s/漢字(標準差為2.31 s/漢字),聲調嵌入編碼方法的平均摸讀效率為4.91 s/漢字(標準差為1.23 s/漢字),4行2列編碼方法的平均摸讀效率為4.12 s/漢字(標準差為1.11 s/漢字)。根據方差分析結果可得,在摸讀效率上,通用盲文編碼方法與另外2種編碼方法存在顯著差異(p<0.01);聲調嵌入編碼方法和4行2列編碼方法沒有顯著差異(p>0.05)。由此可得,通用盲文編碼方法的摸讀效率最低,其他2種方法的摸讀效率相當。
2)摸讀準確率。
圖8所示為3種編碼方法的摸讀準確率,由圖可知3種方法都具有較高的平均摸讀準確率,分別為:通用盲文編碼方法為98.6%(標準差為10.21%),聲調嵌入編碼方法為96.8%(標準差為12.42%),4行2列編碼方法為98.6%(標準差為7.21%)。方差分析得出聲調嵌入編碼方法與其他2種方法的摸讀準確率存在顯著差異(p<0.05),即聲調嵌入編碼方法的準確率較其他2種方法要低。
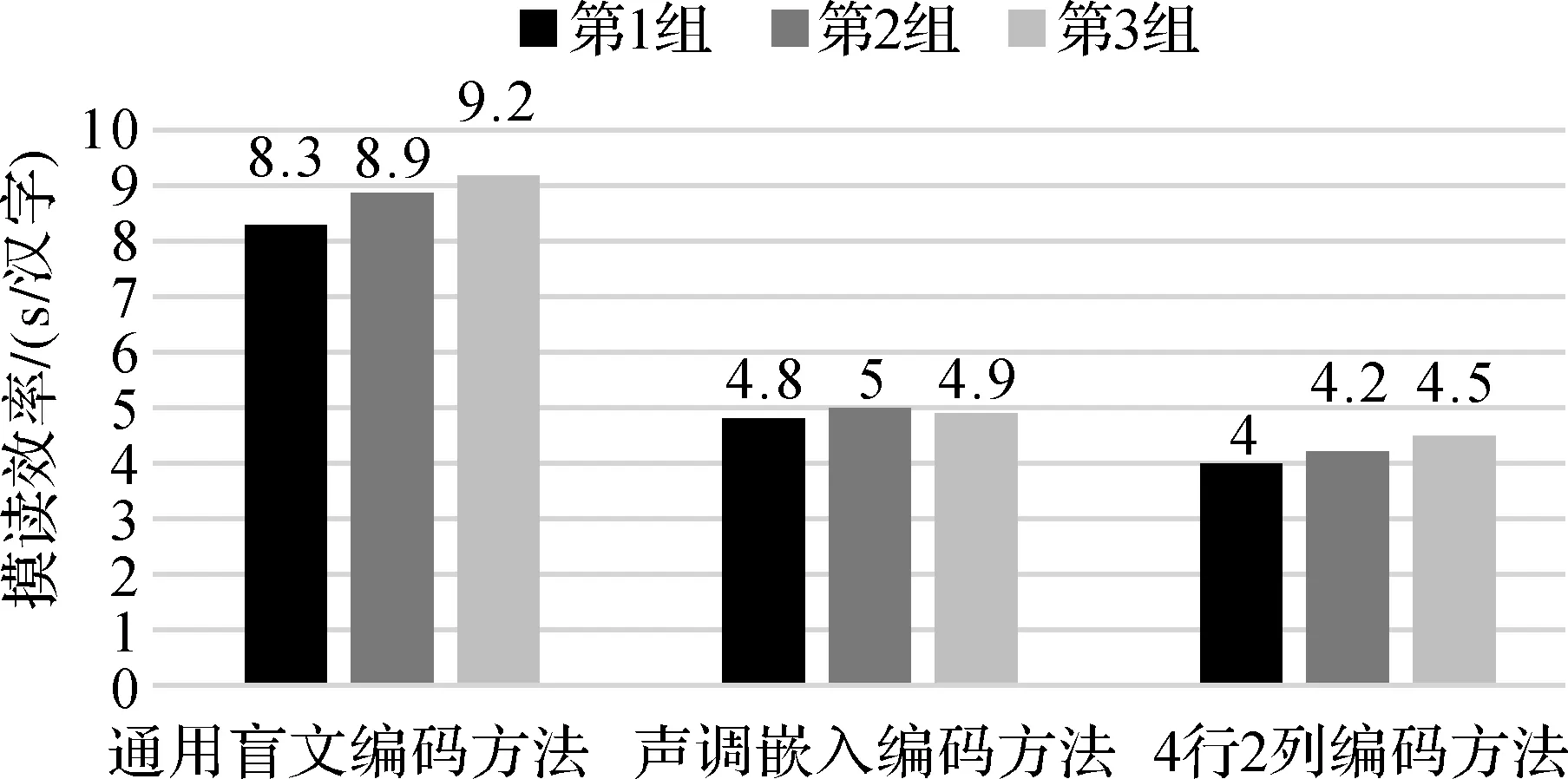
圖7 3種編碼方法的摸讀效率Fig.7 Reading efficiency of three encoding methods

圖8 3種編碼方法的摸讀準確率Fig.8 Reading accuracy of three encoding methods
3)用戶滿意度。
利用5 分制李克特量表對3 種編碼方法進行主觀評價,結果如圖9所示。

圖9 3種編碼方法的用戶滿意度Fig.9 User satisfaction of three encoding methods
由圖9可知:
①學習難易程度方面。通用盲文編碼方法的得分均值為4.7 分,標準差為0.41 分;聲調嵌入編碼方法的得分均值為3.2分,標準差為0.73分;4行2列編碼方法的得分均值為4.2分,標準差為0.52分。方差分析結果表明通用盲文編碼方法與其他2種編碼方法在學習難易程度上存在顯著差異(p<0.01),即通用盲文編碼方法的學習難度最低。
②易用性方面。通用盲文編碼方法的得分均值為3.2 分,標準差為0.62 分;聲調嵌入編碼方法的得分均值為2.9分,標準差為1.13分;4行2列編碼方法的得分均值為4.8分,標準差為0.81分。方差分析結果表明,4 行2 列編碼方法與其他2 種編碼方法在易用性上存在顯著差異(p<0.01)。因此,4 行2 列編碼方法的易用性最高。
③舒適度方面。通用盲文編碼方法的得分均值為4.6 分,標準差為0.91 分;聲調嵌入編碼方法的得分均值為3.8分,標準差為1.12分;4行2列編碼方法的得分均值為4.8分,標準差為0.70分。方差分析結果表明聲調嵌入編碼方法與其他2種方法在舒適度上存在顯著差異(p<0.01)。因此,聲調嵌入編碼方法的舒適度最低。
④整體評價方面。通用盲文編碼方法的得分均值為3.1 分,標準差為0.82 分;聲調嵌入編碼方法的得分均值為2.9分,標準差為1.23分;4行2列編碼方法的得分均值為4.8分,標準差為0.61分。方差分析結果表明,4 行2 列編碼方法與其他2 種方法存在顯著差異(p<0.01)。由此可以看出,受試者對4行2列編碼方法的整體評價優于其他2種方法。
3.1.5 實驗1結果討論
實驗1結果表明:通用盲文編碼方法的摸讀準確率高,學習難度最低,但其摸讀效率最低;聲調嵌入編碼方法的摸讀效率高,但其摸讀準確率、易用性、舒適性和整體評價偏低,且學習難度較大;4行2列編碼方法的摸讀效率、摸讀準確率、易用性和整體評價最高。
大多數受試者(11/12)認為,通用盲文編碼方法的編碼方式與現行通用盲文規范一致,學習難度較低,但需要連續摸讀3個盲文方,識別效率較低;對于聲調嵌入編碼方法,需要先熟悉新的編碼方式,在同時識別盲文和聲調對應的觸感紋理的過程中容易混淆,導致舒適度和準確率低;對于4行2列編碼方法,雖然它與現行通用盲文規范有所區別,但這種新的編碼方式很容易掌握,摸讀準確率和舒適度較高。
3.2 實驗2
根據實驗1的結果挑選出綜合得分最高的4行2列編碼方法,與基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法進行摸讀效率、摸讀準確率和用戶滿意度的比較。如圖10所示,基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法把屏幕劃分為3行2列(左側列:盲文點位1,2和3;右側列:盲文點位4,5和6),每行盲文用一個二等分屏幕觸感紋理進行表征;若盲文點位為凸點,則手機產生振動觸覺反饋,若該點位為凹點,則手機不產生振動反饋。用戶手指在屏幕上從左到右滑動感知第1行至第3行盲文點位的振動反饋。由此可知,在該方法中,1個盲文需要3個觸感紋理來表征,同時需進行3次從左到右的滑動摸讀操作。

圖10 基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法Fig.10 Vibration motor tactile feedback encoding method based on right-sliding touch reading mode
3.2.1 實驗2設備
測試4行2列編碼方法時采用實驗1中的設備;測試振動馬達觸覺反饋編碼方法時使用搭載Android 4.0操作系統,內置柱狀振動馬達傳感器,屏幕大小為4.7 英寸,分辨率為1 280×720 像素的智能手機HTCS720e。
3.2.2 實驗2受試者
受試者為實驗1的12名受試者。每位受試者將得到100元的報酬。
3.2.3 實驗2過程
受試者分別用2種方法進行摸讀測試。為減小實驗順序的影響,將受試者分為2組,每組各6位。第1 組先進行4 行2 列編碼方法的測試,再進行振動馬達觸覺反饋編碼方法測試;第2組與第1組的測試順序相反。
由于受試者已經熟悉4行2列編碼方法,在進行實驗2時,實驗人員只需向受試者介紹振動馬達觸覺反饋編碼方法,并給予10~15min的練習時間,以熟悉該方法的編碼方式和摸讀方式。
采用客戶端-服務器端架構進行實驗。實驗開始后,服務器端隨機生成漢字并發送至客戶端,客戶端根據服務器端生成的漢字進行觸感編碼。受試者在識別完成后,向實驗人員讀出所識別的拼音,實驗人員在服務器端上選擇正確與否,并記錄在日志中。同時,當受試者滑動屏幕進行摸讀識別時,客戶端記錄受試者開始摸讀的時間以及識別完成的時間,并發送到服務器端,保存在日志中,用于計算摸讀的交互時間。實驗過程中始終保持周圍環境安靜,并為受試者戴上隔音耳機。
本實驗中,系統每次實驗共生成10個漢字,每個漢字在每種方法的測試過程中隨機出現3次,因此每種方法的測試總次數為10×3×12=360次。每位受試者測試2種編碼方法的實驗過程共持續約30 min,每位受試者在每個方法測試結束后休息5 min。實驗結束后,受試者在實驗人員幫助下填寫5分制李克特量表,對2種編碼方法進行主觀評價。
3.2.4 實驗2結果
1)摸讀效率。
4行2列編碼方法的平均摸讀效率為4.05 s/漢字(標準差為1.20 s/漢字),振動馬達觸覺反饋編碼方法的平均摸讀效率為4.93 s/漢字(標準差為1.82 s/漢字)。方差分析結果表明2種編碼方法的摸讀效率存在顯著差異(p<0.05)。因此,4 行2 列編碼方法比振動馬達觸覺反饋編碼方法具有更高的摸讀效率。
2)摸讀準確率。
4 行2 列編碼方法的平均摸讀準確率為98.2%(標準差為6.57%),振動馬達觸覺反饋編碼方法的平均摸讀準確率為98.3%(標準差為13.2%)。方差分析結果表明,2種編碼方法在摸讀準確率上不存在顯著差異(p=0.65 >0.05)。因此,這2種方法的摸讀準確率都比較高,但從穩定性上看,4行2列編碼方法的穩定性更高。
3)用戶滿意度。
①學習難易程度方面。4行2列編碼方法的得分均值為4.3分(標準差為0.76分),振動馬達觸覺反饋編碼方法的得分均值為3.8 分(標準差為0.54 分)。方差分析結果表明2種編碼方法在學習難易程度上存在顯著差異(p<0.01)。因此,4 行2 列編碼方法的學習難度較低。據受試者反映,振動馬達觸覺反饋編碼方法與傳統盲文編碼方法區別較大,需要一定的時間來學習和熟悉。
②易用性方面。4行2列編碼方法的得分均值為4.78分(標準差為0.77分),振動馬達觸覺反饋編碼方法的得分均值為4.69分(標準差為0.69分)。方差分析結果表明2種編碼方法在易用性上不存在顯著差異(p>0.05)。因此,這2種方法都有較高的易用性。
③舒適度方面。4行2列編碼方法的得分均值為4.8分(標準差為0.91分),振動馬達觸覺反饋編碼方法的得分均值為4.05 分(標準差為1.2 分)。方差分析結果表明2種編碼方法在舒適度上存在顯著差異(p<0.01)。因此,4行2列編碼方法的舒適度較高。
④整體評價方面。4行2列編碼方法的得分均值為4.8分(標準差為0.58分),振動馬達觸覺反饋編碼方法的得分均值為3.56分(標準差為1.02分)。方差分析結果表明2種編碼方法在整體評價上存在顯著差異(p<0.01)。因此,4 行2 列編碼方法的整體評價較高。據受試者反饋,相較于4行2列編碼方法,振動馬達觸覺反饋編碼方法與傳統盲文編碼方法的區別較大,需要一定時間適應,且在識別時需要進行語義轉換。
3.2.5 實驗2結果討論
實驗2結果顯示:在摸讀效率上,與振動馬達觸覺反饋編碼方法相比,4行2列編碼方法具有較高的摸讀效率;在摸讀準確率上,2 種編碼方法都有很高的準確率,但4行2列編碼方法具有更高的穩定性;在用戶滿意度上,4行2列編碼方法的學習難易程度比振動馬達觸覺反饋編碼方法低,當用戶熟悉2種方法之后,其易用程度相當,但用戶更傾向于使用4行2列編碼方法,這是因為振動馬達觸覺反饋編碼方法與傳統盲文編碼方法的區別較大,需要一定時間適應,且在識別時需要進行語義轉換。
綜上所述,相比于基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法,4行2列編碼方法具有更強的實用性。
5 結 語
提出了3種基于可變摩擦力觸感的移動終端漢語盲文編碼方法,分別為通用盲文方案編碼方法、聲調嵌入編碼方法及4行2列編碼方法。在裝有可變摩擦力觸感裝置的移動終端上,參考Braille 盲文標準和《國家通用盲文規范》,把觸感屏幕劃分為3行2列(或4行2列)等分區域,每個區域采用不同的觸感紋理來表征盲文的凹凸點。結果表明3種編碼方法的平均摸讀效率分別為8.82,4.91,4.12 s/漢字;3種編碼方法都具有較高的準確率,平均準確率分別為98.6%,96.8%,98.6%;用戶對4 行2 列編碼方法的整體評價較高。對比4行2列編碼方法與基于向右滑動摸讀方式的振動馬達觸覺反饋編碼方法發現,4行2列編碼方法更優。綜上所述,4行2列編碼方法更適用于裝有可變摩擦力觸感裝置的移動終端。
但用戶反映,此種設備觸感偏弱,屏幕尺寸稍大,因此在下一步的工作中將通過優化觸感硬件設備來提升觸感反饋;同時,將采用尺寸較小的屏幕來提高摸讀效率。此外,在今后的研究中,將嘗試完成數字、英文字母、標點符號、詞語、語句等的編碼方法設計和可用性評估。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
