車載導航激光雷達技術研究現狀及其發展趨勢
2020-05-25 02:46:05常穎李萌彭鳳超任華軍
中國新通信 2020年1期
關鍵詞:發展趨勢
常穎?李萌?彭鳳超 任華軍

摘要:激光雷達是實現無人駕駛汽車的重要傳感器,由于其功能特性可以在復雜環境的感知中起到關鍵作用,越來越受高度重視。通過對現有激光雷達的系統組成與工作原理描述,介紹了車載導航激光雷達分類和技術特點,分析了激光雷達在國內外研究現狀及面臨的挑戰,最后總結了激光雷達后續發展趨勢,文章可以作為相關技術應用有益參考。
關鍵詞:無人駕駛;激光雷達;環境感知;發展趨勢
一.概述
自2017年開始,自動駕駛進入高速發展快車道,全球各大汽車廠商、互聯網公司、新興造車企業相繼推出自動駕駛計劃,有機構預測到2035年全球無人駕駛汽車銷量將達到2100萬輛.激光雷達作為無人車的“眼睛”,作為無人車上最重要的傳感器之一,隨著自動駕駛產業的發展,近年來出現了井噴式的需求,并極大地影響著無人車的發展。
激光雷達能夠及時精確測量無人車周邊一定距離內的三維環境信息,并上傳至載車控制系統,實現周圍地物目標高精度三維信息測量、路面分割、車道線檢測、障礙物探測識別、路徑規劃等。激光雷達由于具有高精度、高分辨率的優勢,已經成為目前主流無人駕駛技術中必備的傳感器。
二.系統組成和工作原理
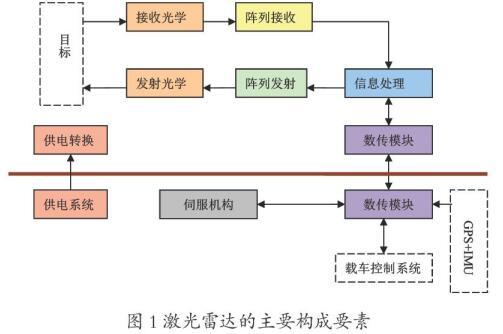
激光雷達英文名稱為LiDAR(Light Detection and Ranging),也稱Laser Radar或LADAR (Laser Detection and Ranging)。從功能層面劃分,車載激光雷達組成如圖1所示,由激光發射組件、激光接收組件、信息處理組件、收發光學組件、伺服控制組件、數傳組件、供電組件組成。激光雷達系統的核心組件主要有激光器、掃描器及光學組件、光電探測器及接收電路等,可提供高分辨率的幾何圖像、距離圖像、強度圖像。
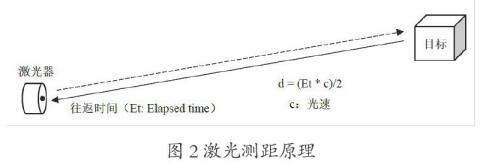
其工作原理是飛行時間法,即根據激光遇到障礙物后的折返時間,計算目標與自己的相對距離。激光光束可以準確測量視場中物體輪廓邊沿與設備間的相對距離,輪廓信息組成點云并繪制出3D環境地圖,精度可達到厘米級別,其激光測距原理如圖2所示。
在先進駕駛輔助系統(ADAS)系統中,激光雷達通過透鏡、激光發射及接收裝置,基于TOF飛行時間原理獲得目標物體位置、移動速度等特征數據并將其傳輸給數據處理器;同時,汽車的速度、加速度、方向等特征數據也將通過CAN總線傳輸到數據處理器;數據處理器對目標物體及汽車本身的信息數據進行綜合處理并根據處理結果發出相應的被動警告指令或主動控制指令,以此實現輔助駕駛功能。
三.優勢
根據環境感知激光雷達的任務分析以及實用化的考慮,環境感知激光雷達具有如下優勢:
1、精細性測量
為規劃行車路線,激光雷達具有對戰車周邊環境精細的三維測量,包括路況及路面上的各類物體,以滿足戰車通過性路徑選擇的需求。激光雷達工作于光學波段,頻率比微波高2-3個數量級以上,可同時跟蹤多個目標,因此,激光雷達具有極高的距離分辨率、角分辨率和速度分辨率。
2、遠距離實時性測量
為保證一定行車速度下的行車安全,激光雷達具備遠距離測量能力,具有較高的數據刷新率,實時提供載車周邊環境信息,可直接獲取目標的距離、角度、速度等信息,生成目標的多維度圖像,使得整個畫面更加直觀。
3、高可靠性
激光屬于直線傳播、方向性好、光速非常窄,只有在其傳播路徑上才能接收到,所以干擾信號也很難進入激光雷達的接收機,另外,對于激光雷達而言,只有被照射的目標才會產生反射,完全不會受地物回波的影響,因此可探測低空/超低空目標,探測概率遠高于微波雷達。
4、可全天時工作
激光主動探測,不依賴于外界光照條件或目標本身的輻射特性,只需發射自己的激光束,通過探測發射激光束的回波信號來獲取目標信息。它顛覆傳統了二維投影成像模式,可采集目標表面深度信息,為目標探測、識別、跟蹤等數據處理提供充分的信息支持、降低算法難度。
四.國內外研究現狀
車載導航激光雷達在過去幾年中已經成為光電子領域最受爭議的熱門應用之一,由于其在環境感知、避障、自主導航、無人駕駛領域潛在的巨大應用價值,國內外數十家研究機構和企業都在依托微波雷達、相機和激光雷達等技術,紛紛進軍車用激光雷達領域。
車用激光雷達其主要技術特點是多通道(線)掃描。可以按照激光束(線)分為1線、4線、8線、16 線、32線或64線激光雷達傳感器,多個激光束在豎直方向沿不同角度發出,經水平方向掃描實現對目標區域三維輪廓探測。多個測量通道(線)相當于多個傾角的掃描平面,因此垂直視場內激光線越多其豎直方向的角分辨率就越高,激光點云密度就越大。1-4線短測距的激光雷達主要作為移動機器人的三維環境探測傳感器——“眼睛”,具備高度機動能力的智能車輛的“眼睛”則需要更長測程、更多線數(8線、16線甚至更多)。
目前國內外已有多家廠商從事導航激光雷達的研究生產,商用車載導航激光雷達主要廠商包括Velodyne、Quanergy、IBEO、Innoviz、LeddarTech、TriLumina、Ouster等。國內民用產品研制單位有杭州巨星、廣州中海達、速騰聚創、上海禾賽等公司。Velodyne、Quanergy激光雷達主要用于自動駕駛汽車導航;IBEO的激光雷達受限于線型和精度,主要應用于高級駕駛輔助系統。激光雷達按有無機械旋轉部件可分為3類:
1、機械式激光雷達:指發射和接收系統存在宏觀意義上的轉動,通過不斷旋轉發射頭,將速度更快、發射更準的激光從“線”變成“面”,并在豎直方向上排布多束激光,形成多個面進而達到動態3D掃描并動態接收信息的目的。機械式激光雷達作為在自動駕駛車輛上最先應用的產品,具有掃描速度快、接收視場小、可承受高的激光功率等優點,但是結構笨重、重量和體積較大、裝調工作復雜、可靠性差和價格高昂的缺點制約了其在自動駕駛領域的發展空間。圖3中左一是Velodyne公司第一代機械激光雷達HDL-64E。
2、混合固態激光雷達:內部兼具“固態”和“運動”兩種屬性,僅需要一束激光光源,通過MEMS掃描鏡反射激光光線并采用微秒級的頻率協同工作,探測器接收后達到對目標3D掃描的目的。混合固態激光雷達相較采用多組芯片組的機械式激光雷達,體積更小、成本更低、可靠性更高、探測距離更遠。在2016年1月的美國CES消費電子展上,Velodyne發布了其第一款汽車專用的3D激光雷達——混合固態超級冰球,這款產品為32線束激光雷達,體積小巧、便于汽車安裝攜帶,同時價格低廉,性價比較高。
3、全固態激光雷達:內部沒有任何宏觀或微觀上的運動部件,目前市場上主要的全固態激光雷達產品有光學相控陣激光雷達、調頻連續波激光雷達、納米天線陣列激光雷達和泛光面陣式激光雷達。全球領先的固態激光雷達傳感器和智能傳感解決方案提供商Quanergy Systems提供的S3是全球首款汽車級固態激光雷達系統,如圖4所示。通過發射器、接收器和信號處理器三個主要組件的交互,S3每秒生成五十萬個數據點。激光器在水平120°內發射平行光脈沖,光接收器探測反射光脈沖。通過在各個方向掃描,S3在車輛周圍創建出實時3D視圖,以檢測、分類和跟蹤場景中的對象。全固態激光雷達耐久性、可靠性最佳,符合自動駕駛對雷達固態化、小型化和低成本化的需求,成為未來技術演進的終極方向。
五.面臨的挑戰
隨著自動駕駛技術的快速發展,激光雷達愈發扮演重要的角色,但對近年來國內外各類車載激光探測系統的發展應用情況的綜合分析,可以發現國內在該領域的應用研究還存在一定差距,尤其在軍用無人車載激光雷達領域,與國外發展相比,國內研究還面臨以下挑戰:
1、激光雷達設備成本較高,規模化、批量化生產能力較弱。目前激光雷達系統設備的生產加工往往為按訂單生產或小批量加工方式,自動化水平較低,生產、裝配成本較高,導致其在相關領域應用普及較慢,還不能滿足應用快速發展的需求。
2、多數研究專注于規范化道路目標的無人自主行駛識別方面,對越野環境無人駕駛目標感知探測方面的研究未能深入。一些工作側重于方案設計、算法研究,沒有實物場景探測方面的試驗研究;
3、環境適應能力是未來激光雷達技術發展需要克服的瓶頸。激光雷達可以做到全天時工作,但大氣環境對激光雷達性能造成影響,大雨會吸收激光脈沖,而大霧會造成激光脈沖發射,從而對激光雷達造成影響。
4、黑客攻擊。激光雷達發出去的激光本身是沒有編碼的。所以接收器自己本身是沒辦法識別到底這束光線是它隔壁發射器發射出去的還是干擾信號。黑客攻擊指的是采取模擬車輛、行人的信號,反饋給激光雷達造成周圍存在障礙物假象的攻擊手法。最終會導致汽車被強制減速或者剎車。
六.發展趨勢
為迎合當前軍事應用的迫切需求,必須盡快加大牽引力度,全面推動無人車載激光雷達技術的研究工作,縮短差距,盡快實現相關裝備的工程化應用。從國內外主流廠商的產品研究應用計劃分析,車載激光雷達發展趨勢如下:
1、全固態化
全固態掃描車載激光雷達的技術發展趨勢,全固態掃描的目標就是。產品固態化是提高激光雷達可靠性、環境適應性,并降低激光雷達成本價格的必由之路。固態激光雷達異軍突起,成為各大企業爭相研發和布局的領域。固態激光雷達系統使用激光掃描儀生成環境3D圖像,并自動處理此3D圖像,以執行監視、警告、制動和轉向等任務。固態激光雷達市場的增長可歸功于汽車行業的發展,特別是針對無人駕駛汽車和先進駕駛輔助系統(ADAS)的應用。此外,低成本化將是國產激光雷達發展的必然趨勢。
2、小型化和低成本化
緊湊輕小是激光雷達設備的發展趨勢。未來的智能車用激光雷達可能像車燈一樣分布在汽車四周——共同實現汽車周邊監控或探測。局部視場(如110°),8、16或32線激光雷達有利于嵌入汽車車身進行整車集成,也是一重要發展方向;目前激光雷達較高的技術壁壘和成本價格,使其市場推廣和產品落地受阻。無人駕駛汽車技術的發展對小型化、低成本激光雷達的需求提出了更高的要求。這些需求成為推動激光雷達設備進一步小型化和低成本化的動力。
3、多線化
從當前市場上較常見的車載激光雷達來看,機械式多線束激光雷達是主流方案,主要有4線/8線/16線/32線的,最高級別的64線和128線產品。多線激光雷達主要應用于無人駕駛汽車,可以實現實時多物體運動軌跡跟蹤,獲取周圍環境點云構建3D環境模型。根據激光雷達的工作原理可知,激光雷達線束越多,視線越密集,測量的精準度、分辨率和安全性也就越高。多線激光雷達具有多激光光束,且多采用非機械掃描的固態相控陣掃描方式,具有更強的環境感知能力,因此,激光雷達的多線化也將是未來發展的趨勢之一。
4、技術指標的不斷提高
激光雷達的測程、視場覆蓋和測量網格密度是評價激光雷達技術能力的主要技術參數,也是激光雷達的主要應用技術指標,激光雷達技術及產品的發展必然伴隨著上述技術指標的不斷提高。激光器性能和數據采集效率還有待進一步提升。隨著用戶對大區域高密度點云的需求持續擴大,需要在獲取高密度點云時保證較高的數據采集效率。然而,由于激光器性能限制,目前激光器探測能力已經逐漸逼近探測極限。因此,改進探測器的性能成為當務之急。單光子/量子成像激光雷達將成為未來激光雷達未來發展的重要方向。
5、數據后處理軟件的成熟度
在數據后處理軟件的成熟度方面,當前點云數據處理還處在發展完善階段,尤其是面向終端用戶滿足行業應用需求的定制化軟件還處在不斷發展完善中。隨著激光雷達企業的競爭加劇,軟件和硬件技術的有效結合才能更快地推進產品落地應用。
七.結語
車載激光雷達近幾年發展迅速,相比國際產品性能,國產激光雷達技術仍需持續攻堅投入。激光雷達在自動駕駛領域受到了極大的關注,不僅提高了汽車的輔助性安全性,更為今后無人駕駛的實現提供可能。未來在各方企業和科研單位的推動下,車載激光雷達技術將會得到進一步發展,同時將會應用到更多不同的場景和領域。
參考文獻:
[1].姜立標.汽車傳感器及其應用[M].北京:電子工業出版社,2013,9.
[2].黃武陵.激光雷達在無人駕駛環境感知中的應用[J].單片機與嵌入式系統應用,2016,16(10):3-7.
[3].余瑩潔.車載激光雷達的主要技術分支及發展趨勢[J].科研信息化技術與應用,2018,9(6):16–24
[4].陳慧巖.智能車輛先進技術叢書:無人駕駛汽車概論[M].北京理工大學出版社,2014.
作者簡介:
常穎(1987—),女,漢族,河南鄭州,中國電科27所,工程師,碩士,研究方向:情報研究。
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 18:10:09
現代經濟信息(2016年19期)2016-10-20 15:51:16
現代經濟信息(2016年19期)2016-10-20 15:26:02
中國科技博覽(2016年19期)2016-10-19 13:03:52
中國科技博覽(2016年18期)2016-10-19 09:22:46
中國市場(2016年35期)2016-10-19 01:55:52
商場現代化(2016年22期)2016-10-18 20:54:08
科學與財富(2016年28期)2016-10-14 20:02:56
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:36:54
