三峽庫區ADS應用問題研究
2020-05-26 02:07:27司太生屈文鵬
中國水運 2020年3期
司太生 屈文鵬

摘 要:了解常壓潛水裝具的系統組成、操作方式,分析了每一部分的功能配置。針對三峽庫區水深過大、水底渾濁和河床形態多樣化等深潛水作業難點,分析了ADS裝具在三峽庫區深水救助中的適應性問題及設備需求,進而提出改進常壓潛水裝具的措施,包括水下作業工具、中繼器形狀以及潛水裝具的搭載平臺。
關鍵詞:ADS;深度潛水;三峽庫區
三峽庫區目前使用的潛水救助裝具是內河救助常使用的普通潛水裝具。裝具組成有面罩、頭盔、潛水服、氣瓶組件、減壓和呼吸系統等。其中呼吸系統的供氣設備有儲氣罐、空氣壓縮機等。這些潛水設備在內河潛水打撈時,效果好、成本小。但是,三峽庫區成庫后:水深達到175m,部分水深更是超過200m。面對這種情況,傳統的潛水救助潛水裝具明顯達不到這個深度要求。如果強行作業,對潛水人員會有巨大的健康隱患,并且很難完成水下的作業要求;三峽成庫后,河底淤泥化嚴重,這也給水下搜尋、救助帶來了很大困難;庫區水下能見度差,目前使用潛水頭燈的情況下能見度不足一米。那么,面對復雜的潛水環境,以三峽為代表的內河深潛水救助問題急需引入合適的深潛水救助設備。三峽庫區河段船舶遇險沉沒的話,普通潛水無法到達水下救援。氦氧飽和潛水又需要龐大的水面支持系統,包括有生活艙、加壓艙、潛水鐘等。并且,每次救援都需要有多名潛水員輪換作業。整個的投資成本比常壓潛水系統高很多,并且,專業的潛水人才需求量過大。
相比之下,常壓潛水裝具的水面控制平臺較為簡單,只有一個控制室和船上水面吊放系統;水面只需要一個監控臺、一個操作人員;水下也只需要一個嫻熟的裝具潛水員即可完成整個救援任務。
1 國內外裝備現狀
1715年,世界上產生了第一臺潛水裝具,直到1882年Carmagnolle裝具的出現,可以認為是常壓潛水裝具發展的初期階段。在這一階段,此時的裝具發展是由于人類對于海底財寶的打撈需求,此時常壓潛水裝具的技術水平還處在非常低的水平,下潛深度較小,裝具沒有配備輔助的生命支持設備并且此時的供氣方式只是通過氣管由水面供氣,沒有通訊和推進系統,裝具的頭盔視窗以平板玻璃為主,不僅尺寸小視野有限而且轉向不易,無法觀察到側向的信息。但是從這一時期開始,潛水行業中才出現了常壓潛水這一概念,并一步步的從最初的桶型結構到現在的仿人型結構,材料方面從木質材料發展到金屬材料。從20 世紀60 年代初,英國MikeHumphrey和Mike Borrow及Tritonia 裝具的發明者Joseph Peress合作設計了JIM 裝具。
我國在20世紀90年代成功研制出QSZ-Ⅱ型常壓潛水系統。該裝具采用鑄鋁軀體, 鍛鋁四肢關節, 最大工作深度達到300m, 水下最大巡航半徑50m。 QSZ-Ⅱ型裝具相比以前裝具的進步之處不僅在于材料的改變、工作范圍的增加,而且還另外增加了4個動力推進器,可以實現定深、定高、定航。還改善了控制系統, 使潛水員在水下的活動更加方便、快捷。其最大特點是水下的運動方式可以有兩種選擇:既能使用仿生腿關節進行貼底行走,又能依靠螺旋槳進行自主的水中移動。并且這種動力方式既可通過裝具內部人員操作,也可通過水面船舶控制室內操作人員進行遙控。
2 常壓潛水系統(ADS)
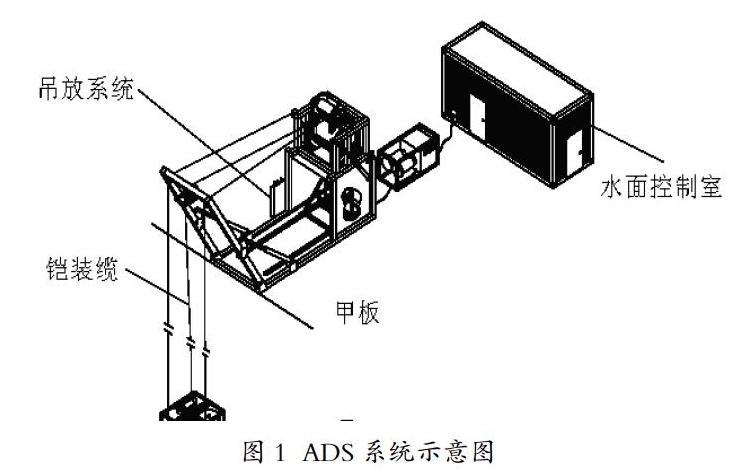
常壓潛水系統(ADS)是一種深水載人作業工具系統,包含有潛水員穿著的潛水裝具、中繼器、水面起吊裝置及水面船舶搭載的控制指揮系統組成。該系統一般都搭載在船舶上,在需要下潛水域附近進行現場的布放,實現單人的水下作業。ADS相比于傳統的潛水救援作業,其最大優勢在于它可以保持裝具內部一個標準大氣壓,在下潛上浮的過程中無需考慮 增減壓的問題,可以實現潛水人員快速、大強度作業的要求;裝具通過綜合鎧裝纜里面的氧氣通道給潛水人員供氧、配備生命體征檢測設備、檢測數據實時顯示在水面檢測指揮人員操作屏幕,以保護潛水員的生命需求;水面指揮系統主要負責整個救援活動的指揮和參與決策、水上水下即時的通訊保障以及潛水人員的安全保障活動。整個ADS系統如圖1:
在使用ADS進行水下救援時,首先需要把整個系統搭載到救援船舶上,通過船舶水面吊裝系統把水下裝具和機器人下放到救援附近水底,然后潛水員自行走出開展水下救援任務。整個中繼器有鎧裝纜繩與水面吊裝系統連接,方便系統的回收,而潛水員裝具也是通過綜合鋼纜和中繼器連接。待完成水下救援任務之后,潛水員乘坐中繼器返回船上,完成整個救援活動。
3 ADS系統的控制操作方式
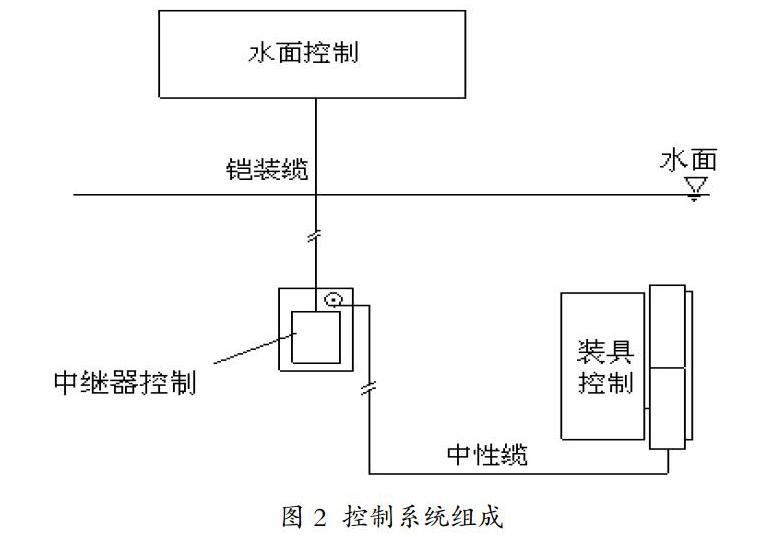
整個控制系統按照空間劃分為水面控制、中繼器控制和潛水裝具控制三部分。
水面控制是整個潛水系統的控制臺,負責接收機器人采集到的水下信息,并且實現水下、水面的信息交換(包括水上水下人員交流、水下視頻信息的傳輸和水面操作指令的下達。水面控制部分與中繼器之間通過水中鋼纜進行連接。
水下中繼器是整個潛水裝具的重要組成部分,它實現了水面設備與水下裝具之間的通訊中轉,水下裝具的布放和回收,同時,隔離了水面船舶以及水下作業時纜繩隨意擺動而纏繞潛水員等存在安全隱患。中繼器的存在保證了水下作業的安全性,并且提高了裝具在水下的機動性。裝具內部通過各種生命信息監控設備和安全監控設備反映潛水人員的生命體征,裝具外部加載水下信息采集設備,包括采集視頻信息的水下高清攝像機、三維成像設備等。
潛水裝具的控制主要是水下的走行活動、信息的采集和傳輸控制以及各種特殊作業工具的具體使用。
4 ADS系統在三峽庫區的適用性分析
這個系統的核心之處在于中繼器。它是連接水面控制室和潛水裝具的中樞。
4.1中繼器的功能需求分析
(1)首先,中繼器作為裝具下潛上浮的載具,必須有良好的穩定性,可以抵抗各種不同流速的水域環境。用來保證潛水作業人員下潛、上浮的安全。
(2)中繼器作為信息傳輸的樞紐,必須保證信號傳輸良好、實現上下水面的實時溝通。
(3)中繼器上應該有必要的生命救助保障,如少量氧氣的儲備等。
4.2 中繼器的改進意見
(1)三峽庫區不同水層水流速度差別很大,分層流速明顯,并且很多部分還有旋渦、泡水等。這些因素都給中繼器的安全釋放回收帶來了挑戰。傳統的矩形中繼器不適合實際救援過程,當中繼器著陸水地面不平時,這樣的結構可能發生側翻等。為了盡可能的減少側翻的意外,中繼器外觀結構應該設置成為橢球狀。
(2)作為信息傳輸的樞紐,同時也是氧氣等生命保障措施的樞紐,我們必須使用足夠堅固的鋼纜包裹通訊、呼吸等傳輸通道。
(3)萬一發生意外,中性纜的斷裂或者鋼裝纜的破損,我們必須能夠保證潛水人員安全回到水面。
4.3 裝具加載成像技術
應該給常壓潛水裝具裝備更多的水下成像觀測技術。水下綜合成像技術包含了普通成像技術和三維成像技術。我們認為應該在裝具上搭載普通高清水下攝像探測,另外再配合以多波束測深系統為主的水下三維成像技術,結合起來,更好確定探測水域的地貌。多波束測深系統具有高精度、高效率的優點。它的探測結果是條帶狀的水深圖以及條帶狀水下地貌圖,該結果可以全面了解探測區水底地形,但無法直觀地判讀水底情況;普通高清成像技術,其成像結果是水下小范圍的直觀成像,無法全面、高效地了解整個探測區的水底環境。當發生事故時,我們面對出事水域,可以先采用三維多波束測深系統進行目標水域的水下地形描繪,結合當地海事部門的地下水文資料,分析出幾個可能的目標點。再結合普通高清成像技術進行定點的小范圍清晰成像。
4.4 創新水下作業工具
三峽庫區深水救助主要是為了沉船搜索、人命救助和沉船、沉物等的打撈。
在使用這類潛水裝具時,潛水人員在進行水下作業時,由于裝具的限制,只可以采用水下機械手進行作業,而不是人的手。常壓潛水發展至今,已經形成了較為成熟的水下作業工具,比如:爪式夾持器 、水下靈巧手等。
機械手的靈活性和功能性需要進一步提升。包括應對特殊的作業需求,比如說船舶打撈時為了固定鋼纜需要打孔,這個時候便需要攜帶鉆頭工具等。還有目前的人形機械手關節的設計更為精密,便可以使得水下操作更加靈活,完成難度更大的救援工作。
除了使用機械手、液壓切割機之外,還可能需要針對沉船進行固定,以方便起吊。另外,集裝箱等則是通過機械手進行鋼纜的固定,然后才用水面起重船舶進行打撈作業。
另外,傾覆的散貨船等(砂石、煤炭)如果不處理,則會淤積航道,因此,可以在救助裝具上加裝散貨抽取管道,水下機器人手持管道抽取水下散貨,管道動力泵設在海巡救助艇上,通過管道即可清理水下的沉物。機械手加持管道,通過中性纜、鋼纜和水面連接。面對特殊沉船,比如化學品傾覆、石油等通過此種救援方式可以減少二次污染,回收資源。
5 救援平臺的搭建
為了實現常壓潛水裝具在三峽庫區應急救援工作中的使用,我們需要在救援海巡艇上選擇搭載吊放系統和設置水面控制室。
5.1 水面吊放系統
水面吊放系統是安裝在水面指揮船舶側面,用來進行水下中繼器的吊放和回收活動。根據三峽庫區現有海巡艇的結構特點,船舶前方甲板部分有足夠的空間可以裝載ADS水面吊裝系統,此吊放系統可以考慮安裝在前方甲板側面,折疊放置,需要使用ADS進行水下活動的時候才展開吊裝系統。
5.2 水面控制室
水面控制室主要就是水面的終端操作和水下操作設備的監控等。具體來說控制室操作員需要完成水面水下的信息交流和任務下達;通過顯示器監控水下操作人員的生理指數、氧氣含量等;配合救援指揮人員結合水下信息采集設備得到的水下情況完成救援的決策;監控中繼器、水下裝具、各種工具的安全監控。水面控制室可以設在船艙內靠前任意一塊區域,需要面積約三平方米。
6 總結
常壓潛水裝具非常適合三峽庫區河段的深水救助任務。ADS結構相對簡單,成本較低,面對各種復雜條件下的水底長時間救助任務都可以滿足。但是,由于該裝備還沒有廣泛應用于內河打撈,所以,相應的輔助設施設備還不夠全面,需要進一步優化和裝配。我相信ADS常壓潛水系統將成為內河深潛水的發展和應用的方向。
參考文獻:
[1]姜旭胤, 劉濤, 王璇. 常壓潛水裝具現狀及關鍵技術綜述%Current status of atmospheric diving suit and its key techniques[J]. 艦船科學技術, 2013, 035(009):1-8.
[2]沈丹, 王磊, 劉濤. 常壓潛水系統國內外應用淺析[J]. 信息系統工程, 2013(07):106+116-117.
[3]楊青松, 胡勇, 侯德永, et al. Creep analysis for the hemispheric window of atmospheric diving suit%常壓潛水裝具半球形觀察窗蠕變特性分析[J]. 船舶力學, 019(10):1261-1266.
[4]周延東, 姜瑛, 王磊. ADS駕駛員考核評價體系研究[J]. 信息系統工程, 2015(10):39-40.
[5]湯國偉, 邱中梁, 楊申申, et al. 常壓潛水裝具水下作業工具研究[J]. 液壓與氣動, 2009(06):8-10.
[6]姜旭胤, 劉濤, 王璇. 常壓潛水裝具現狀及關鍵技術綜述%Current status of atmospheric diving suit and its key techniques[J]. 艦船科學技術, 2013, 035(009):1-8.
[7]嚴似松, 黃根余. 單人常壓潛水服運動阻力試驗研究[J]. 海洋工程, 1990(02):46-51.
[8]沈丹, 趙俊海, 王磊, et al. 單人常壓潛水系統(ADS)控制技術應用研究%Application of Control Technology in Atmospheric Diving System (ADS)[J]. 中國造船, 000(4):78-89.
[9]古浪, 馬嶺, 王璇, et al. 單人常壓潛水裝具水下作業工具系統研究[J]. 機械工程師, 2015, No.294(12):81-83.
[10]周華林. 單人常壓潛水裝具運動特性計算[J]. 中國造船, 1992(02):43-54.
[11]王去偽. 潛水器在海洋水下作業中的應用[J]. 海洋科學, 1989, 000(004):71-72.
[12]施東春, 李麗娜, 王帥, et al. Experimental Research on Tether Management System for Atmospheric Diving System%作業型單人常壓潛水裝具(ADS)中繼器的試驗研究[J]. 中國造船, 000(4):90-100.
