物流機器人在通道中高速運輸安全性分析
2020-05-28 09:36:21劉賽趙陽徐巖松崔平吳越鵬
軟件導刊 2020年3期
關鍵詞:移動機器人
劉賽 趙陽 徐巖松 崔平 吳越鵬
摘 要:移動機器人在狹窄通道的移動速度直接影響物料運輸效率,提出一種基于生存理論的新型分析方法判斷機器人在狹窄轉彎通道的高速安全性。生存理論可以同時考慮環境和機器人動力學的雙重限制,在理論上具有安全分析上的先進性。首先分析直線通道的生存性,然后擴展到轉角通道,給出了通道生存核的計算方法,其中多面體運算起到了關鍵作用。采用生存理論分析系統環境能獲得較大的安全控制裕度,為機器人高速移動提供了理論支撐與技術支持。
關鍵詞:移動機器人;生存理論;生存核;物流機器人;機器人避障
DOI:10. 11907/rjdk. 191609
中圖分類號:TP311 ? 文獻標識碼:A??????????????? 文章編號:1672-7800(2020)003-0001-05
Safety Analysis of High Speed Transportation of Logistics Robot Narrow Channel
LIU Sai1, ZHAO Yang2, XU Yan-song2, CUI Ping2, WU Yue-peng1
(1. School of Optical-Electrical information and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; 2. Oil Production Equipment Branch Daqing Oilfield Equipment Manufacturing Group, Daqing 163255, China)
Abstract: The speed of movement of mobile robots in narrow passages is critical to the efficiency of material transport. This paper proposes a new method based on survival theory to judge the high-speed safety of the robot in the narrow turning channel. Survival theory can consider both the limits of environment and robot dynamics. This paper first analyzes the survivability of linear channels, and then expands to the corner channel. The polyhedral operation plays a key role in the calculation by giving the general road survival kernel calculation method. A large safety control margin can be obtained by using the survival, which provides theoretical support and technical support for the high-speed movement of the robot.
Key Words: mobile robot; survival theory; survival core; logistics robot; robot obstacle avoidance
0 引言
高速運輸對于產業物流機器人至關重要。例如,在工廠、倉庫、醫院等場合,機器人的移動空間有限,通常處于狹窄通道中工作。傳統的機器人控制需要減速確保轉彎安全,但這會降低運輸效率。轉彎減速的主要原因在于傳統方法沒有將環境復雜性與機器人的動力學約束完美融合,從而影響了轉向避讓效率。現有機器人避障方法很多,其中不考慮機器人模型的控制稱為非模型方法,包括人工勢場法[1]、矢量場直方圖(VFH)[2]、模糊控制[3]等。這些方法比較保守,不能保證機器人的動力學符合環境特征。
為使機器人以更高速度避障,必須考慮基于機器人的動態模型進行軌跡預測[4]。現有軌跡預測方法通常是基于隨機模型或確定性模型。隨機模型包括隱馬爾可夫模型[5]、神經網絡[6]、貝葉斯網絡[7]、支持向量機[8]、高斯混合模型[9]等。這些模型可由機器人運行數據訓練得來,如速度、加速度、方向角等,可靈活用于機器人控制。但是如果訓練數據難以覆蓋必要的狀態空間,特別是機器人的危險狀態,這些方法可能引起嚴重事故。
還有一種軌跡預測方法是使用確定性模型,但是當控制輸入范圍較大時,預測軌跡也具有多種可能性,因此會導致計算避障策略浪費巨大的計算資源。典型方法如動態窗口方法(DWA)[10]、控制Lyapunov函數法[11]、路徑規劃[12]等,這些方法通常采用效率較低的搜索優化方法。因此,需要新的控制方法使機器人適應復雜環境。模型預測控制(MPC)可以同時考慮環境約束,機器人控制限制和機器人動力約束,進而提供優化的控制信號,因此引起了當今研究者的廣泛關注[13]。移動機器人在障礙環境中移動的MPC結構可以通過以下約束有限時間最優控制(CFTOC)問題[14]表示。
其中,下標[k|t]表示算法從[t]時刻開啟并向后預測的[k]時刻,[k+1|t]表示[k]時刻的后續預測時刻,[xk|t]和[uk|t]分別表示預測[k]時刻處的狀態及控制,模型的動態不確定性由擾動向量[dk|t]表示。E(.)表示隨機變量的期望。求解問題(1)可獲得一組控制序列[uk|t],在滿足約束條件的情況下,使代價函數cost(.)期望最小,方程(1b)定義了機器人動力學模型,(1c)表示機器人控制[u]的限制條件,(1d)表示環境約束,(1e)為初始狀態。
雖然MPC能較完美地解決機器人的動態適應問題,并在一定程度上充分考慮預測時間段內所有可行路徑,再依據代價函數選出最優路徑實施跟蹤。但是MPC在控制閉環穩定性與控制求解可行性方法上還存在較大缺陷,可見機器人避障領域亟需新理論解決機器人安全移動問題。研究發現,生存理論有望在該領域實現突破。生存理論是Aubin等[15]首先提出并用于分析動態系統演化與環境適應性的理論,為穩定性分析、安全性設計等領域提供了新方法。
1 生存理論概述
考慮一般控制系統[16]:
其中,[x∈Rn]為系統狀態;為系統控制;[fx,u]為[Rm+n]到[Rn]上的Lipschitzian函數。將上述系統模型用集值映射表示便于生存理論推導,系統(2)則可表示為:
定義1[17] 考慮集合,對于任意初始狀態[x0∈Rn],使得[x(t)∈K],,其中[xt]是系統(2)的解,則稱系統(2)在集合K中是可生存的。
定義2 [17] 令,則集合[K]在[x]處的切錐定義為:
其中,[dKy]為點[y∈Rn]到集合[K]的距離。
定理1 [17] 對于系統(2),閉集是可生存的充要條件為:對任意[x∈K],都有:
定義3 [18] 如果,且,則稱[J]為系統在[K]中的一個生存域。
環境集合[K]最大的生存域被稱為生存核,用[ViabK]表示。
定義4 [18] 系統相對集合[K]的生存核為:
2 物流機器人構成及其動力學模型
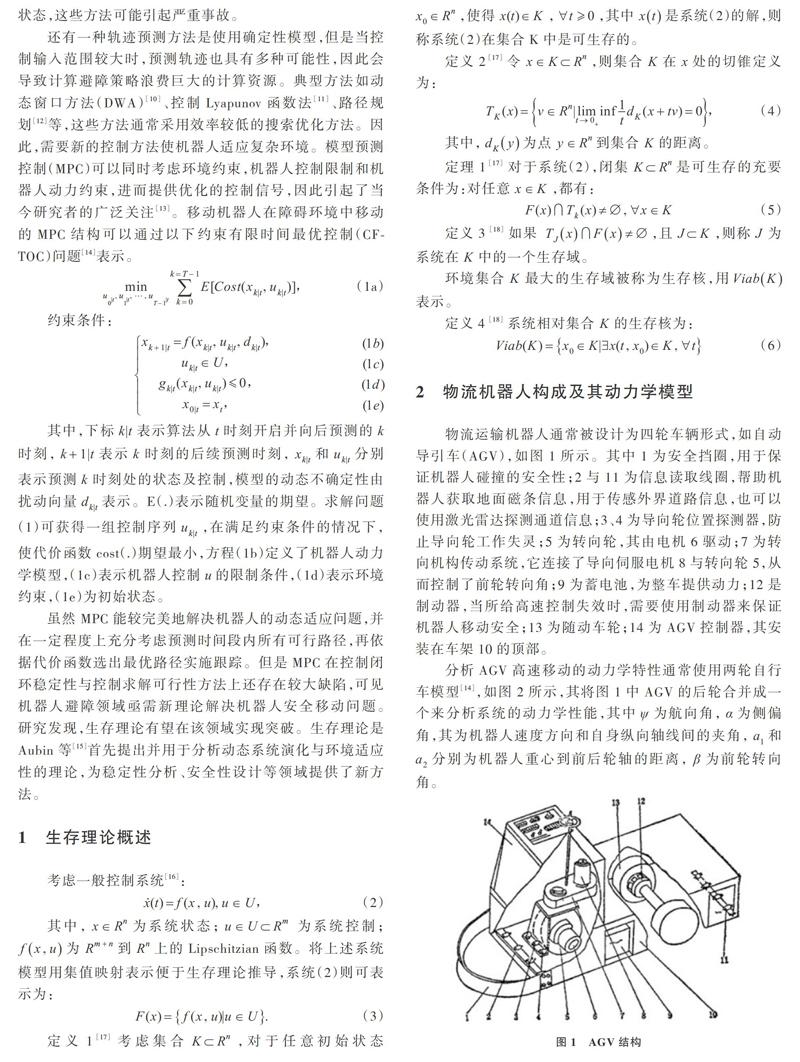
物流運輸機器人通常被設計為四輪車輛形式,如自動導引車(AGV),如圖1所示。其中1為安全擋圈,用于保證機器人碰撞的安全性;2與11為信息讀取線圈,幫助機器人獲取地面磁條信息,用于傳感外界道路信息,也可以使用激光雷達探測通道信息;3、4為導向輪位置探測器,防止導向輪工作失靈;5為轉向輪,其由電機6驅動;7為轉向機構傳動系統,它連接了導向伺服電機8與轉向輪5,從而控制了前輪轉向角;9為蓄電池,為整車提供動力;12是制動器,當所給高速控制失效時,需要使用制動器來保證機器人移動安全;13為隨動車輪;14為AGV控制器,其安裝在車架10的頂部。
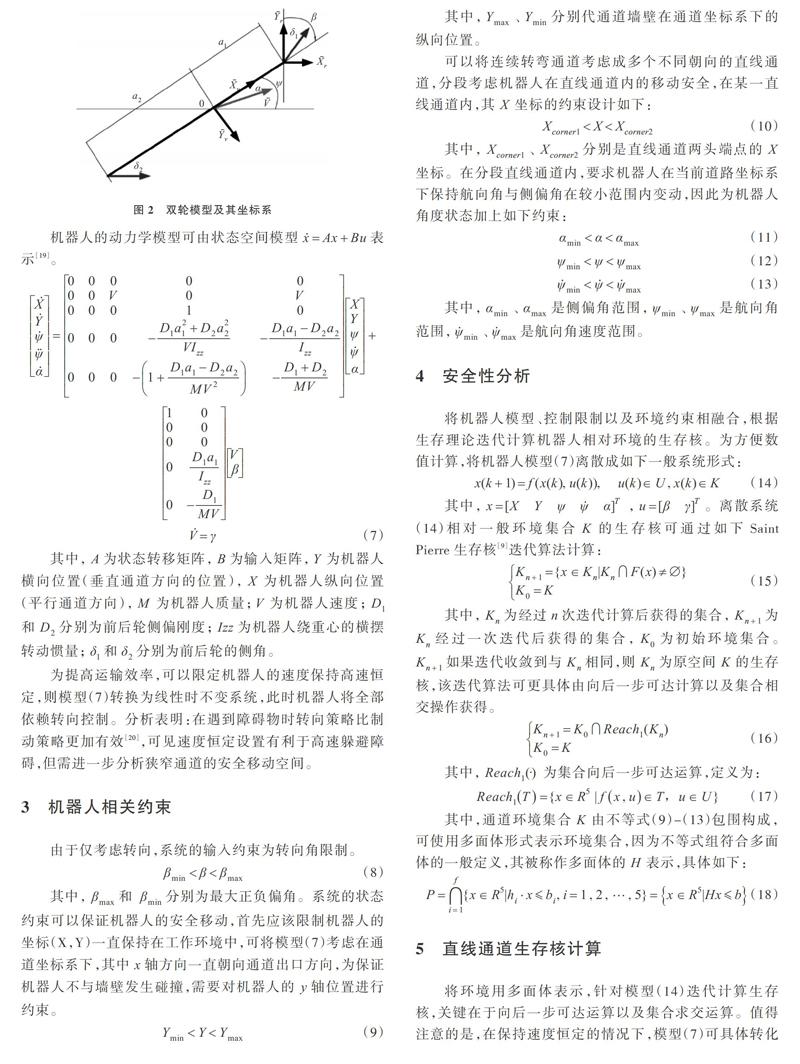
分析AGV高速移動的動力學特性通常使用兩輪自行車模型[14],如圖2所示,其將圖1中AGV的后輪合并成一個來分析系統的動力學性能,其中[ψ]為航向角,[α]為側偏角,其為機器人速度方向和自身縱向軸線間的夾角,[a1]和[a2]分別為機器人重心到前后輪軸的距離,[β]為前輪轉向角。
機器人的動力學模型可由狀態空間模型[x=Ax+Bu]表示[19]。
其中,[A]為狀態轉移矩陣,[B]為輸入矩陣,[Y]為機器人橫向位置(垂直通道方向的位置),[X]為機器人縱向位置(平行通道方向),[M]為機器人質量;[V]為機器人速度;[D1]和[D2]分別為前后輪側偏剛度;[Izz]為機器人繞重心的橫擺轉動慣量;[δ1]和[δ2]分別為前后輪的側角。
為提高運輸效率,可以限定機器人的速度保持高速恒定,則模型(7)轉換為線性時不變系統,此時機器人將全部依賴轉向控制。分析表明:在遇到障礙物時轉向策略比制動策略更加有效[20],可見速度恒定設置有利于高速躲避障礙,但需進一步分析狹窄通道的安全移動空間。
3 機器人相關約束
由于僅考慮轉向,系統的輸入約束為轉向角限制。
其中,[βmax]和分別為最大正負偏角。系統的狀態約束可以保證機器人的安全移動,首先應該限制機器人的坐標(X,Y)一直保持在工作環境中,可將模型(7)考慮在通道坐標系下,其中[x]軸方向一直朝向通道出口方向,為保證機器人不與墻壁發生碰撞,需要對機器人的[y]軸位置進行約束。
其中,[Ymax]、[Ymin]分別代通道墻壁在通道坐標系下的縱向位置。
可以將連續轉彎通道考慮成多個不同朝向的直線通道,分段考慮機器人在直線通道內的移動安全,在某一直線通道內,其[X]坐標的約束設計如下:
其中,[Xcorner1]、[Xcorner2]分別是直線通道兩頭端點的[X]坐標。在分段直線通道內,要求機器人在當前道路坐標系下保持航向角與側偏角在較小范圍內變動,因此為機器人角度狀態加上如下約束:
其中,[αmin]、[αmax]是側偏角范圍,[ψmin]、[ψmax]是航向角范圍,[ψmin]、[ψmax]是航向角速度范圍。
4 安全性分析
將機器人模型、控制限制以及環境約束相融合,根據生存理論迭代計算機器人相對環境的生存核。為方便數值計算,將機器人模型(7)離散成如下一般系統形式:
其中,[x=[XYψψα]T] ,[u=[βγ]T]。離散系統(14)相對一般環境集合[K]的生存核可通過如下Saint Pierre生存核[9]迭代算法計算:
其中,[Kn]為經過[n]次迭代計算后獲得的集合,[Kn+1]為[Kn]經過一次迭代后獲得的集合,[K0]為初始環境集合。[Kn+1]如果迭代收斂到與[Kn]相同,則[Kn]為原空間[K]的生存核,該迭代算法可更具體由向后一步可達計算以及集合相交操作獲得。
其中,[Reach1(·)] 為集合向后一步可達運算,定義為:
其中,通道環境集合[K]由不等式(9)-(13)包圍構成,可使用多面體形式表示環境集合,因為不等式組符合多面體的一般定義,其被稱作多面體的[H]表示,具體如下:
5 直線通道生存核計算
將環境用多面體表示,針對模型(14)迭代計算生存核,關鍵在于向后一步可達運算以及集合求交運算。值得注意的是,在保持速度恒定的情況下,模型(7)可具體轉化為離散線性時不變系統,可用如下標準形式表示:
其中,[G]為狀態轉移矩陣,[uk∈U],[xk∈K]。一般線性系統(19)的向后一步可由式(20)計算。
其中,[G-1]為矩陣[H]的逆,操作符[⊕]表示集合閔可夫斯基求和操作。可見機器人生存核計算可進一步分解為線性變換、集合求交以及閔可夫斯基求和運算,由于環境使用多面體表示,因此這些集合運算可具體由多面體運算替代。
考慮采用頂點[v1,v2,?,vk]構成的多面體,即采用多面體的V表示法,其線性變換可以由式(21)計算。
考慮兩個采用[H]表示法的多面體則[P1]、[P2]的交集計算方法如下:
考慮兩個采用[V]表示法的多面體[P1]、[P2],閔可夫斯基求和計算如下:
其中,[vi]、[uj]分別是[P1]、[P2]的頂點。
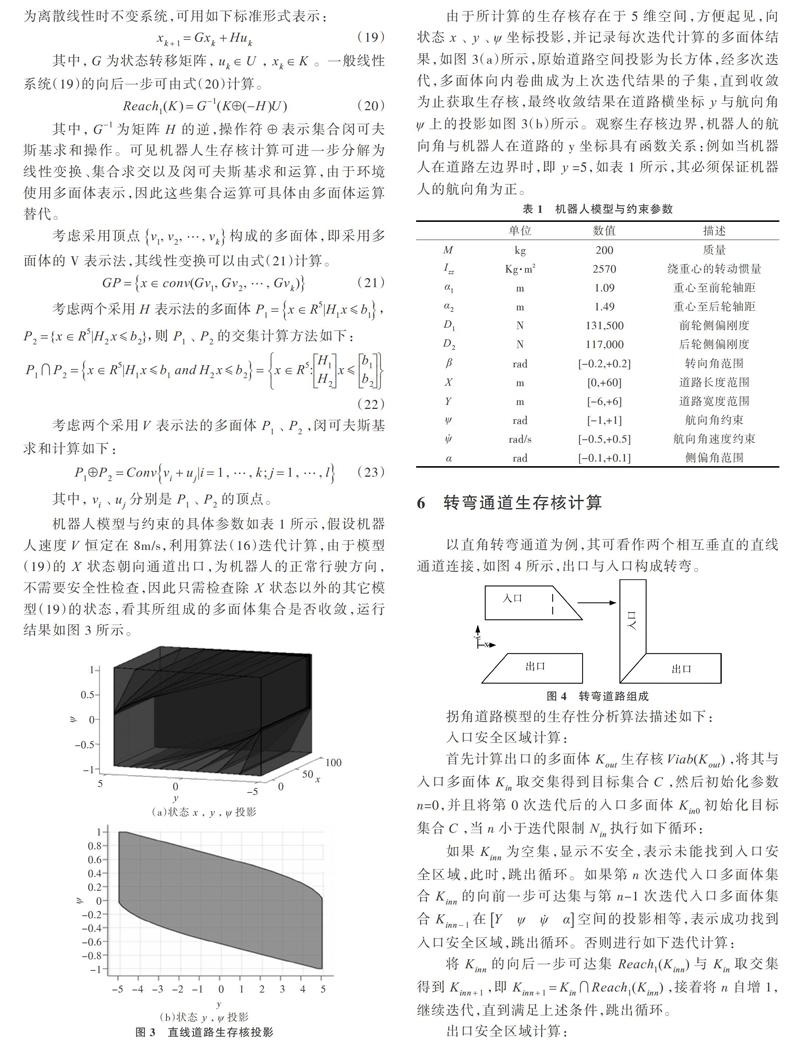
機器人模型與約束的具體參數如表1所示,假設機器人速度[V]恒定在8m/s,利用算法(16)迭代計算,由于模型(19)的[X]狀態朝向通道出口,為機器人的正常行駛方向,不需要安全性檢查,因此只需檢查除[X]狀態以外的其它模型(19)的狀態,看其所組成的多面體集合是否收斂,運行結果如圖3所示。
由于所計算的生存核存在于5維空間,方便起見,向狀態[x]、[y]、[ψ]坐標投影,并記錄每次迭代計算的多面體結果,如圖3(a)所示,原始道路空間投影為長方體,經多次迭代,多面體向內卷曲成為上次迭代結果的子集,直到收斂為止獲取生存核,最終收斂結果在道路橫坐標[y]與航向角[ψ]上的投影如圖3(b)所示。觀察生存核邊界,機器人的航向角與機器人在道路的y坐標具有函數關系:例如當機器人在道路左邊界時,即[y]=5,如表1所示,其必須保證機器人的航向角為正。
6 轉彎通道生存核計算
以直角轉彎通道為例,其可看作兩個相互垂直的直線通道連接,如圖4所示,出口與入口構成轉彎。
拐角道路模型的生存性分析算法描述如下:
入口安全區域計算:
首先計算出口的多面體[Kout]生存核[Viab(Kout)],將其與入口多面體[Kin]取交集得到目標集合[C],然后初始化參數n=0,并且將第0次迭代后的入口多面體[Kin0]初始化目標集合[C],當n小于迭代限制[Nin]執行如下循環:
如果[Kinn]為空集,顯示不安全,表示未能找到入口安全區域,此時,跳出循環。如果第n次迭代入口多面體集合[Kinn]的向前一步可達集與第n-1次迭代入口多面體集合[Kinn-1]在[Yψψα]空間的投影相等,表示成功找到入口安全區域,跳出循環。否則進行如下迭代計算:
將[Kinn]的向后一步可達集[Reach1(Kinn)]與[Kin]取交集得到[Kinn+1],即Reach1(Kinn)],接著將n自增1,繼續迭代,直到滿足上述條件,跳出循環。
出口安全區域計算:
初始化參數i=0,第0次迭代出口多面體集合初始化目標集合[C],如果i小于迭代限制[Nout],執行如下循環:
將集合[Kout]的生存核與[Kouti]的向前一步可達集[Forward1(Kouti)]取交集得到[Kouti+1],即[Kouti+1=Viab(Kout)?][Forward1(Kouti)],i自增1,直到不滿足循環條件,跳出循環。
彎道安全區域計算:
將上述迭代過程中每次迭代后的出口入口多面體集合取交集得到彎道的安全區域即生存核,即[Safe(Kin,]。
其中,表示在線性系統(19)下集合[K]的向前一步可達集,計算方法如下:
(a) 生存核在[x]、[y]方向投影
繼續采用表1的機器人參數與約束條件,機器人速度保持恒定在8m/s(約30km/h)。經上述算法描述計算,獲得轉彎道路的可生存安全區域,迭代結果為圖5(a)道路空間內的深色多面體集,圖中顯示當機器人處于A點時,必須以最大幅度向右轉以確保機器人可以安全通過拐角尖點。當機器人處于右邊界B點,必須最大幅度左轉,否則恒速機器人必將碰撞底部邊界。可見當機器人保持恒定高速度通過轉彎通道時,其安全空間投影相對原始空間在轉彎處有很大收縮,需要控制機器人始終保持在所分析的生存核投影內方能保證機器人的高速移動。
7 結語
本文提出了一種基于生存理論分析移動機器人在通道內高速移動安全性的新方法,引入了多面體及其操作計算通道環境的生存空間,能夠發現曲折空間的最大安全子集,從而更好地指引機器人作避障控制。由于可分析高維空間的安全性能,因此該方法的安全分析具有理論上的先進性。現實環境中,非90°拐角很常見,確保改進算法能夠計算出任意角度拐角的生存核則是下一步研究方向,同時進一步獲取生存核的中心線(具有最大的安全裕度)對機器人進行跟蹤控制。
參考文獻:
[1]KHATIB O. Real-time obstacle avoidance for robot manipulator and mobile robots [J]. Int. J. Rob. Res., 1986(5): 90-98.
[2]ULRICH I,BORENSTEIN J.VFH+: Reliable obstacle avoidance for fast mobile robots[J]. Proceedings of ICRA,1998,? 1572-1577.
[3]AMOOZGAR M H, APIPOUR K, SADATI S H. A fuzzy logic-based formation controller for wheeled mobile robots[J]. Ind. Rob., 2012, 38:269-281.
[4]LIU L,GAO Y.Speed optimization control for wheeled robot navigation with obstacle avoidance based on viability theory[J]. Automatika, 2016, 57:428-440.
[5]NECHYBA M C, XU Y.Stochastic similarity for validating human control strategy models[J]. IEEE Trans. Robotics and Automation, 1998(14):437-451.
[6]WAHAB A,QUEK C,TAN C K,et al. Driving profile modeling and recognition based on soft computing approach[J].? IEEE trans. Neural Networks, 2009(20):563-582.
[7]TEZUKA S, SOMA H, TANIFUJI K. A study of driver behavior inference model at time of lane change using Bayesian networks[J]. In: IEEE Int. Conf. Industrial Technology, 2006:2308-2313.
[8]MANDALIA H M, SALVUCCI M D D. Using support vector machines for lane-change detection [J]. In Proc. HFES, 2005:1965-1969.
[9]SAINT-PIERRE P. Approximation of the viability kernel[J]. Applied Mathematics and Optimization,1994, 29(2):187-209.
[10]WIEST J, H?FFKEN M, KRE?EL U, et al. Probabilistic trajectory prediction with gaussian mixture models[J]. IEEE IV Symposium, 2012, 141-146.
[11]VANDANJON P O, COIRET A, LORINO T. Viability theory and road safety[J]. Vehicle Syst. Dyn., 2013, 51:602-623.
[12]REBAI K,AZOUAOUI O,BENMAMI M, et al.Car-like robot navigation at high speed [J]. In Proc. ROBIO,2007:2053-2057.
[13]CARVALHO A, LEFEVRE S, SCHILDBACH G, et al. Automated driving: the role of forecasts and uncertainty-a control perspective[J]. Eur. J. Control, 2015(24):14-32.
[14]LIU L, GAO Y , WANG F Z . Road safety analysis for high-speed vehicle in complex environments based on the viability kernel[J]. IET Intelligent Transport Systems, 2018(12):495-503.
[15]AUBIN J P. Viability theory[M]. Boston: Birkhauser, 1991.
[16]高巖. 仿射非線性控制系統生存性判別[J].控制理論與應用,2009,26(6): 654-656.
[17]GAO Y. Viability criteria for differential inclusion[J]. Journal of Systems Science and Complexity, 2011(24): 825-834.
[18]VANDANJON P O, COIRET A, LORINO T. Viability theory and road safety [J]. Vehicle Syst. Dyn., 2013,51:602-623.
[19]ELLIS J R. Vehicle Handling Dynamics[M]. New Jersey:Wiley- Blackwell,1994.
[20]SOUDBAKHSH D,ESKANDARIAN A.Steering control collision avoidance system and verification through subject study[J]. IET Intelligent Transport Systems,2015, 10(9): 907-915.
(責任編輯:孫 娟)
收稿日期:2019-05-17
基金項目:國家自然科學基金項目(61074087);上海市自然科學基金項目(17ZR1419000)
作者簡介:劉賽(1994-),男,上海理工大學光電信息與計算機工程學院碩士研究生,研究方向為智能交通;趙陽(1989-),男,大慶油田裝備制造集團采油設備分公司工程師,研究方向為機械制造;徐巖松(1969-),男,大慶油田裝備制造集團采油設備分公司技師,研究方向為機械制造;崔平(1973-),男,大慶油田裝備制造集團采油設備分公司技師,研究方向為機械制造;吳越鵬(1987-),男,上海理工大學光電信息與計算機工程學院博士研究生,研究方向為機器人優化控制。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19