基于Arduino的舵機機械控制研究
2020-05-29 08:12:20江國強謝安潔漆虹琳張利強
企業(yè)科技與發(fā)展 2020年4期
江國強 謝安潔 漆虹琳 張利強
【摘 要】機械結構的研究是當今時代高科技技術發(fā)展的必經之路,在這個人工智能的時代,智能機器人是全球人工智能研究的重點,機器人無論是移動、行動還是工作都是有機械做功完成的,文章研究的是一款基于Arduino的開源機械臂,它擁有6個可活動關節(jié),利用hd參數系統(tǒng)建立空間定位模型。使用LDX-335MG數字舵機,不僅精度高,而且具有末端防燒防堵轉的功能,使得做工更具有可靠性、安全性,超高的精度也使得做功的失誤率降到了最低。
【關鍵詞】機械控制;仿生手臂;舵機
0 引言
自蒸汽機發(fā)明以來,人類便甩開了傳統(tǒng)的機械控制技術,開始進入了機器控制的大門。電能的運用更是讓控制技術得到飛速的發(fā)展與運用,機器人如今可以說是無所不在,大到碼頭、工廠,小到家庭。機械臂則是大多數機器人不可缺少的一部分,本文研究的是Arduino控制伺服機的機械手臂,分析其機械結構、三維空間內位置的關系、多個舵機控制程序。
1 緒論
1.1 研究背景
自機器人誕生到現在,機器人技術已經發(fā)生翻天覆地的變化。全球各國的科學家都在為機器人的研究用盡心血,機器人被廣泛用于汽車鑄造、石油開采、航空航天、船舶碼頭、無人的物流工廠等領域,逐漸淘汰傳統(tǒng)人力做功,讓人們從繁瑣、重復、危險的工作中解放出來。機械手臂是機器人的組成部分,大多數機器人任務都需要機械臂。機械手臂使得機器人可以做更多、更復雜的工作,可以像人一樣做一些靈活的動作,可以說給機器人加上機械臂使得機器人的工作范圍擴大了,同時提升了機器人的工作效率。
1.2 國內外現狀
國外的機器人研究開展得比較早,目前瑞典的ABBRobotics、日本的FAUNC、德國的KUKARoboter等公司擁有較為成熟的技術和研究成果。
國內機器人的研究起步較晚,但近年來很多高校取得了不菲的成果,例如香港大學自動化及制造研究中心的自動導航車和服務機器人、阿里巴巴的無人物流工廠、哈爾濱工業(yè)大學的導游機器人等。
總體來看,國內的機器人研究相對于國外存在著較大的差距,當前有兩個重要的問題亟須解決。
(1)機器人普遍采用的是輪式傳統(tǒng)移動,應用場景要求較高。
(2)機器人的機械臂結構簡單,能完成的動作較少,靈活性不足。
2 機械結構設計
2.1 硬件描述
2.1.1 舵機
整套機械臂一共使用了6個高精度數字舵機,我們從上往下分析。爪子部分使用的是具有防堵轉功能的LDX-335MG數字舵機,當發(fā)生堵轉時,舵機會自動計時,當發(fā)現堵轉超過4 min時,舵機會自動停止工作。兩個舵機是LFD-06防堵轉低功耗的數字舵機,當發(fā)生堵轉時,舵機內部會自動進行保護。在云臺上面的兩個舵機是高精度的雙軸數字舵機,它們采用插拔的連接方式,布線、更換都十分方便。底座上的舵機采用大扭力的1501舵機,它有15 kg的扭力,能旋轉180°。
2.1.2 控制板
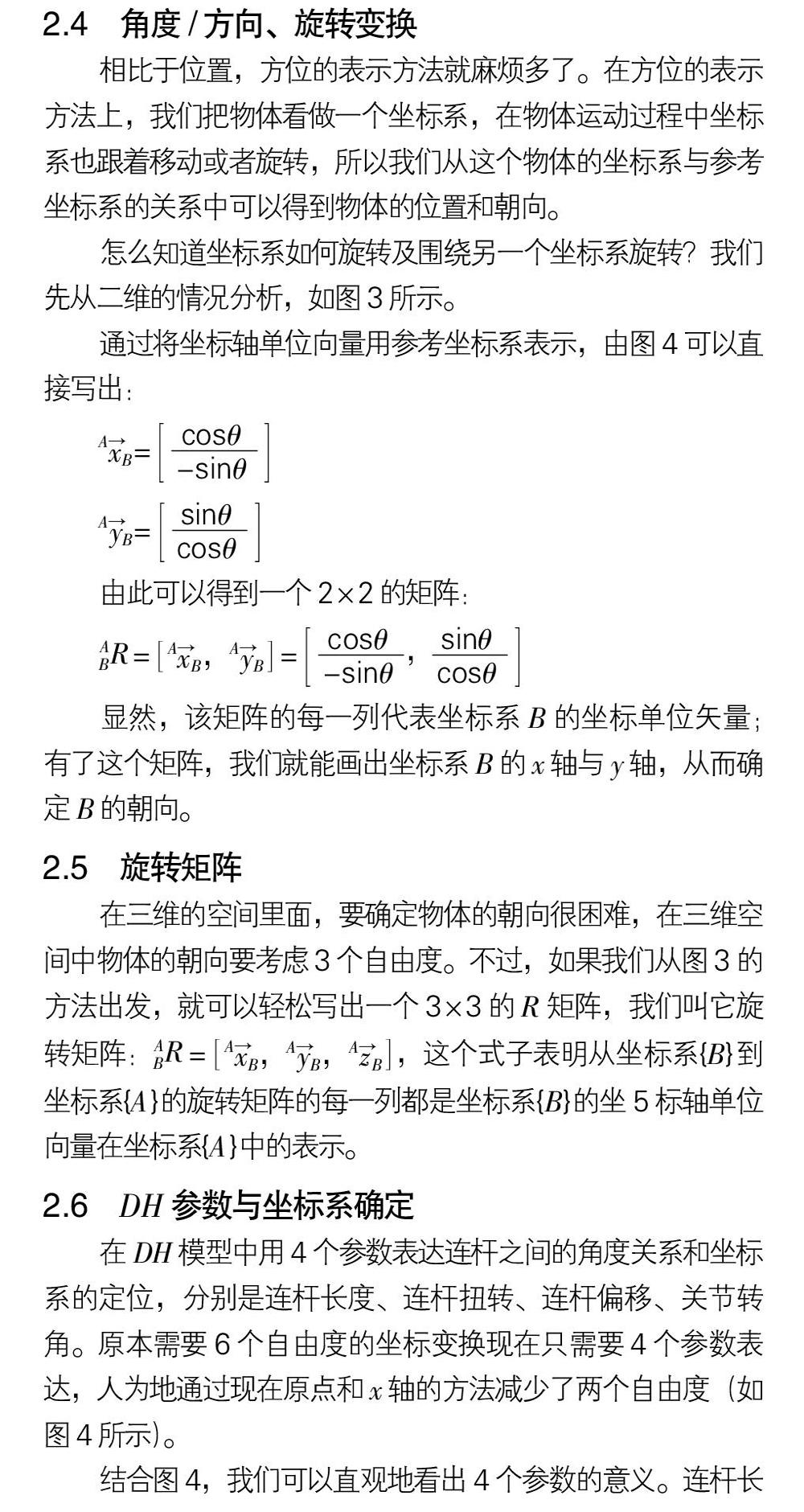
控制板由兩個部分組成,一個是基礎板,另一個是接在主板接口的Arduino板。控制板的正常工作電壓在6.4~8.4 V,低于6.4 V時蜂鳴器會發(fā)出低壓報警信號,提醒用戶。不過我們供電采用的是AD/DC電源適配器,只要插上就不用擔心電壓的問題。控制板上的USB接口是用來下載程序或調試用的,只需接到電腦上,打開相應的上位機即可(如圖1所示)。
2.1.3 Arduino開發(fā)板
Arduino是一款功能強大且易于使用的開放式設計源代碼。免費下載使用開發(fā)界面,閃存32KB存儲空間可滿足您的設計要求,與電機控制板兼容,使電路更簡單、更穩(wěn)定,價格也相對較低。
2.1.4 支架結構
主體支架呈藍色,全部采用硬鋁合金,加上表面噴砂氧化處理,質感好,硬度高。
2.2 坐標系的關系
主要在笛卡爾坐標系中描述空間位置、速度和加速度,也就是說,坐標系統(tǒng)由3個相互垂直的軸組成,這是眾所周知的。確定繞軸旋轉多少角度的正方向是基于右側的規(guī)則,一般用的都是右手坐標系,即繞z軸旋轉時,y軸在x軸的+90°方向。通常,對象/點的名稱寫在右下角,就像坐標系{A}中點O的位置矢量一樣寫作ApO。
2.3 位置與平移交換
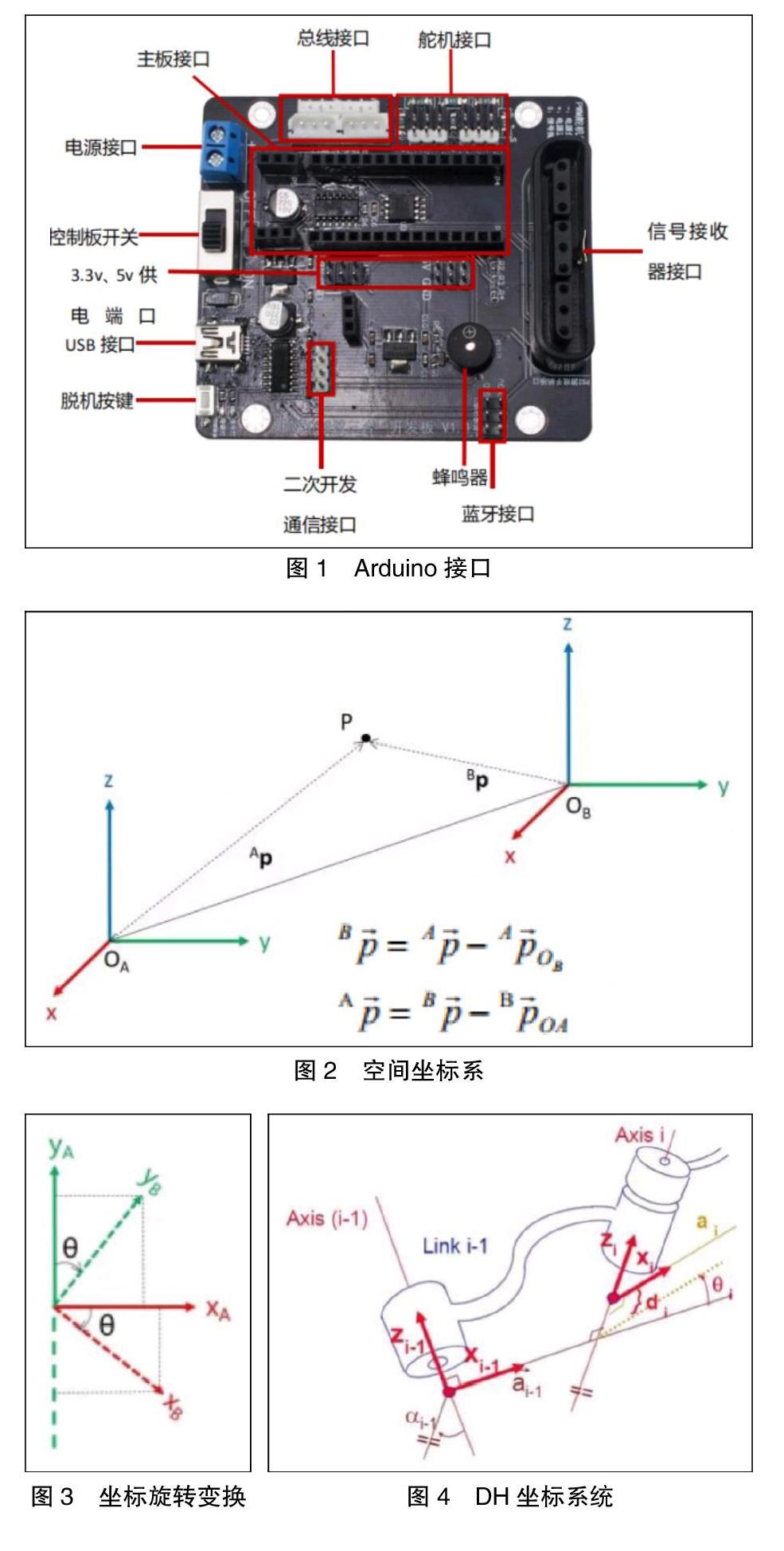
位置表示是很簡單的,直接用三維向量就可以表示。變換是坐標系空間位置的變化,可以用坐標系原點O的位置矢量表示(如圖2所示)。多次平移變換的表示直接向量相加就可以了。
2.4 角度/方向、旋轉變換
相比于位置,方位的表示方法就麻煩多了。在方位的表示方法上,我們把物體看做一個坐標系,在物體運動過程中坐標系也跟著移動或者旋轉,所以我們從這個物體的坐標系與參考坐標系的關系中可以得到物體的位置和朝向。
怎么知道坐標系如何旋轉及圍繞另一個坐標系旋轉?我們先從二維的情況分析,如圖3所示。
通過將坐標軸單位向量用參考坐標系表示,由圖4可以直接寫出:
顯然,該矩陣的每一列代表坐標系B的坐標單位矢量;有了這個矩陣,我們就能畫出坐標系B的x軸與y軸,從而確定B的朝向。
2.5 旋轉矩陣
在三維的空間里面,要確定物體的朝向很困難,在三維空間中物體的朝向要考慮3個自由度。不過,如果我們從圖3的方法出發(fā),就可以輕松寫出一個3×3的R矩陣,我們叫它旋轉矩陣:這個式子表明從坐標系{B}到坐標系{A}的旋轉矩陣的每一列都是坐標系{B}的坐5標軸單位向量在坐標系{A}中的表示。
2.6 DH參數與坐標系確定
在DH模型中用4個參數表達連桿之間的角度關系和坐標系的定位,分別是連桿長度、連桿扭轉、連桿偏移、關節(jié)轉角。原本需要6個自由度的坐標變換現在只需要4個參數表達,人為地通過現在原點和x軸的方法減少了兩個自由度(如圖4所示)。
結合圖4,我們可以直觀地看出4個參數的意義。連桿長度:沿Xi-1的Zi-1到Zi的距離;連桿扭轉:Zi相對于Zi-1繞Xi-1旋轉的角度;連桿偏移:沿Zi的Xi-1到Xi的距離;關節(jié)轉角:Xi相對于Xi-1繞。
由圖4我們可以很明顯地觀察出兩條重要的線:軸線和軸線與相鄰軸線之間的公共法線。在DH的參數表示里,我們把關鍵軸定為z軸;共同法線由x軸定義,x軸方向是從關節(jié)到下一個關節(jié)。這樣可以很容易地表示實際機器人的任何關節(jié),從而更有利于對DH模型的理解。
3 多路舵機控制程序設計
3.1 舵機的內部結構
舵機內置部件主要有舵盤、齒輪組、電機、控制電路、控制線。舵機的動力來源全靠電機提供其高速的轉動為舵機提供了強大的動力,電機的高速轉動帶動減速齒輪組,使之產生高扭力的輸出,舵機的輸出扭力也越大,也就是說越能帶動更大重量的負載,但輸出的轉速也越低。
3.2 舵機的工作原理
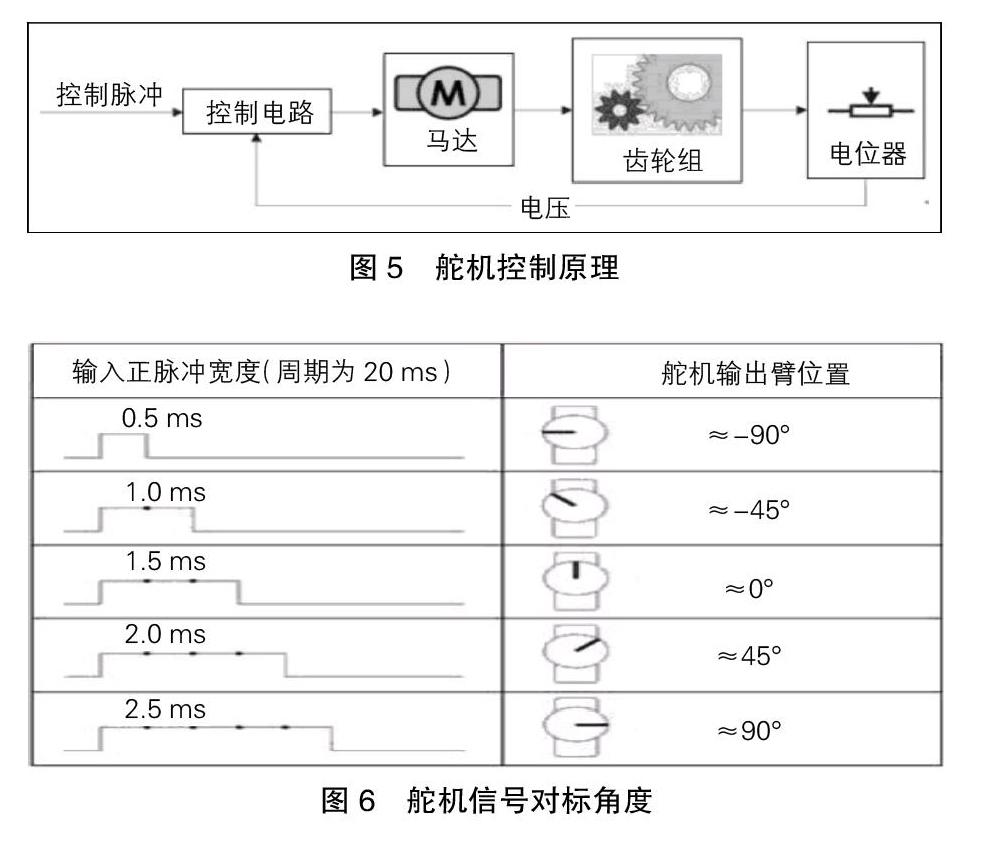
舵機是一個常見的閉環(huán)反饋系統(tǒng),減速器由電動機驅動,輸出驅動線性比例電位器以進行位置感應,電位計將旋轉角度轉換為比例電壓反饋給控制電路,控制電路通過比較對應于輸入控制信號的角度使電動機正向或反向旋轉,使電位器反饋角度趨向于控制信號期望角度,從而達到使伺服機馬達精確定位的目的(如圖5所示)。
3.3 如何控制舵機
舵機的輸入線有3條,中間紅色的為電源線,黑色的是地線,黃色的是標準PWM舵機的控制線。電源與地線為舵機提供能源,電壓通常介于5~8 V之間。甚至舵機在負載重時也會拉低放大器的電壓,所以整個系統(tǒng)的電源供應比例必須合理。
舵機的控制通常需要約20 ms的時基脈沖,并且該脈沖的上位部分通常是0.5~2.5 ms范圍內的角度控制脈沖部分,總間隔為2 ms。模擬舵機需要一直保持周期性的信號才可保持舵機的角度,當失去信號,舵機就會不再輸出動力。圖6為舵機信號對標角度的數據圖。
4 實驗總結
通過以上實驗研究,基于Arduino的舵機控制仿人手的機械手臂具有人手般的靈活性,對在三維的空間里面機械手臂各個節(jié)點的運動軌跡進行了規(guī)劃,其運動進準度達到工業(yè)級別,使用的LDX-335MG數字舵機,當發(fā)生堵轉時,舵機會自動停止工作,防止器械損壞。
參 考 文 獻
[1]劉廣明.PRRR機械手機構分析及運動實現的研究[D].沈陽:沈陽工業(yè)大學,2013.
[2]顧頔,韓鑫.基于Arduino的步進電機教學機械手[C].南京理工大學機械工程學院,2019.
[3]陳鑌,張興遠.基于Arduino的繪圖機器人[C].武夷學院機電工程學院,2016.
[4]孫宏偉,肖正洪.開源硬件Arduino UNO的原理與應用[J].新校園,2013(9):45.
[5]付久強.基于Arduino平臺的智能硬件設計研究[J].包裝工程,2015(10):76-79.
[6]李明亮.Arduino項目DIY[M].北京:清華大學出版社,2014.
[7]潘齊欣,唐型基.基于步進電機控制的仿人機械手臂抓取移動系統(tǒng)設計[C].凱里學院信息工程學院,2016.
[8]金茂菁.我國工業(yè)機器人發(fā)展現狀[J].機器人技術與應用,2001,1(4):32-33.
[9]喬東凱,黃崇林.移動式工業(yè)機器人設計的動力學分析 [J].茂名學院學報,2003,13(3):12-14.
[10]張廣鵬,方英武,田忠強.工業(yè)機器人整機結構方案的動態(tài)性能評價[J].西安理工大學學報,2004,20(1):26-28.
[11]甘志剛,肖南峰.仿人機器人三維實時仿真系統(tǒng)的研究與實現[J].系統(tǒng)仿真學報,2007,19(11):23-24.
