“S”形無碳小車行進(jìn)與轉(zhuǎn)向設(shè)計(jì)研究*
2020-06-01 12:57:06劉科明趙成龍何江周永恒朱銀培石南輝韋建軍劉樹勝馮榮森
科技與創(chuàng)新 2020年9期
關(guān)鍵詞:設(shè)計(jì)
劉科明,趙成龍,何江,周永恒,朱銀培,石南輝,韋建軍,劉樹勝,馮榮森
“S”形無碳小車行進(jìn)與轉(zhuǎn)向設(shè)計(jì)研究*
劉科明,趙成龍,何江,周永恒,朱銀培,石南輝,韋建軍,劉樹勝,馮榮森
(北部灣大學(xué),廣西 欽州 535011)
在國(guó)家大力倡導(dǎo)高效、節(jié)能、環(huán)保的背景下,全國(guó)各地紛紛響應(yīng)。將工程綜合能力競(jìng)賽結(jié)合到高效人才培養(yǎng)方案中,以培養(yǎng)大學(xué)生自主創(chuàng)新學(xué)習(xí)能力。現(xiàn)就以重力勢(shì)能驅(qū)動(dòng)的具有方向控制功能的無碳小車為例,開展機(jī)械設(shè)計(jì)、加工、制造等相關(guān)創(chuàng)新研究工作。以行走路徑為“S”形的小車為例,介紹關(guān)于該小車轉(zhuǎn)向及行進(jìn)結(jié)構(gòu)設(shè)計(jì)思路及方案,利用ug、cad等軟件建立模型并且對(duì)此進(jìn)行系統(tǒng)分析,通過仿真及對(duì)其進(jìn)行實(shí)踐來優(yōu)化設(shè)計(jì),驗(yàn)證可行性。面對(duì)設(shè)計(jì)出現(xiàn)的難點(diǎn)問題,做出有針對(duì)性的分析與探究。
無碳小車;轉(zhuǎn)向機(jī)構(gòu);障礙物;競(jìng)賽
對(duì)小車的結(jié)構(gòu)進(jìn)行構(gòu)思,設(shè)計(jì)的小車為三輪結(jié)構(gòu),由給定重力勢(shì)能轉(zhuǎn)換而得到的能量來驅(qū)動(dòng)其行走及轉(zhuǎn)向。其給定重力勢(shì)能由尺寸¢50 mm×65 mm,質(zhì)量為1 kg的碳鋼物塊獲得。無碳小車結(jié)構(gòu)如圖1所示,轉(zhuǎn)化勢(shì)能可下降高度為(400±2)mm,且重物由小車承載并與之共同運(yùn)動(dòng),不允許從小車掉落,且轉(zhuǎn)向輪最大外徑應(yīng)不小于Φ30 mm。競(jìng)賽時(shí),小車在前行時(shí)能夠自動(dòng)繞過寬度為2 m的賽道上的障礙物,障礙物圓棒直徑20 mm、高200 mm。其沿賽道中線從距出發(fā)線1 m處開始按間距1 m擺放,擺放完成后,將偶數(shù)位置的障礙物按抽簽得到的礙物間距變化值和變化方向移動(dòng)200~300 mm(正值遠(yuǎn)離,負(fù)值移近),競(jìng)賽時(shí)的賽道如圖2所示,以小車前行的距離和成功繞障數(shù)量來評(píng)定成績(jī)。
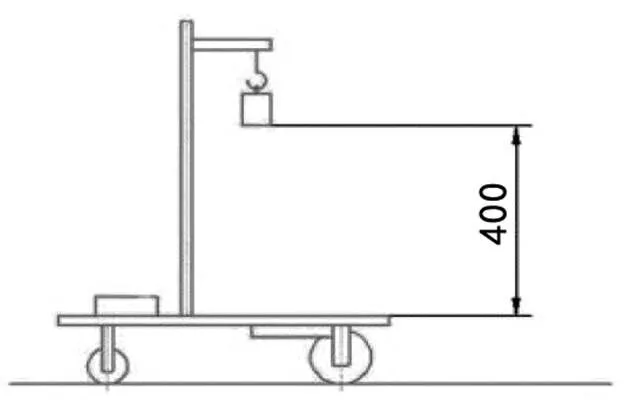
圖1 小車結(jié)構(gòu)示意圖(單位:mm)
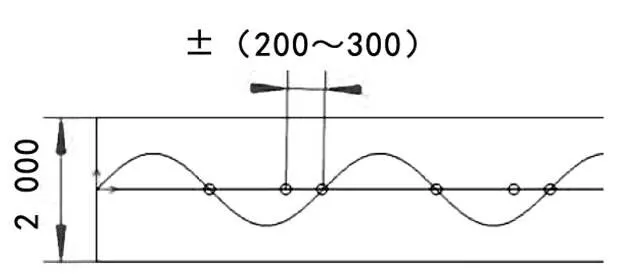
圖2 競(jìng)賽時(shí)的賽道(單位:mm)
1 “S”形無碳小車結(jié)構(gòu)設(shè)計(jì)與分析
經(jīng)分析探討,小車結(jié)構(gòu)分為行進(jìn)機(jī)構(gòu)、轉(zhuǎn)向機(jī)構(gòu)、承載機(jī)構(gòu)及微調(diào)機(jī)構(gòu)。對(duì)承載機(jī)構(gòu)分析,分析重力勢(shì)能轉(zhuǎn)換為動(dòng)能的表現(xiàn)形式,設(shè)計(jì)滑輪有3種方式,具體分析并簡(jiǎn)化,采用大輪帶小輪的方案,即采用雙滑輪結(jié)構(gòu),如圖3所示,根據(jù)能量守恒定義可得出結(jié)論,由于大小滑輪直徑比為2∶1,右側(cè)線繩釋放長(zhǎng)度比左側(cè)釋放長(zhǎng)度增加了1倍,力減小了1倍,由此細(xì)化了重力勢(shì)能單位下降距離所釋放的力。保證小車正常啟動(dòng)與減小行走時(shí)力的改變,啟動(dòng)時(shí)驅(qū)動(dòng)力矩應(yīng)該要比行走過程中的力矩要大一些[1],所以,在繞線軸上加工了階梯軸,階梯繞線軸結(jié)構(gòu)如圖4所示,啟動(dòng)時(shí)用階梯軸軸徑最大部位,以保證小車啟動(dòng)時(shí)所需要的動(dòng)力;啟動(dòng)后用繞線軸的小直徑部位,以節(jié)省能量,滿足在啟動(dòng)到行走時(shí)不同階段不同動(dòng)力的需求。
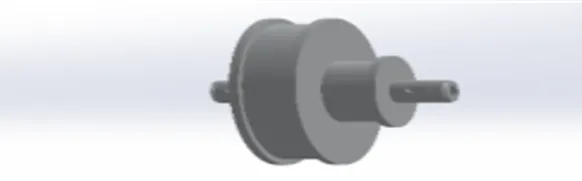
圖3 雙滑輪結(jié)構(gòu)
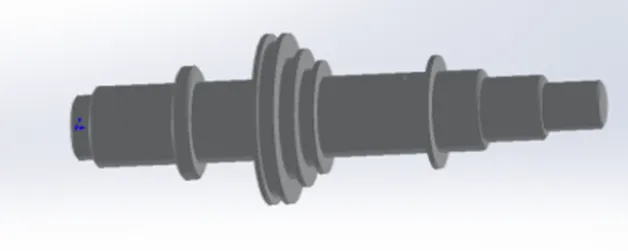
圖4 階梯繞線軸結(jié)構(gòu)
2 “S”形無碳小車行進(jìn)機(jī)構(gòu)設(shè)計(jì)
2.1 行走軌跡的制約因素及問題
在小車運(yùn)動(dòng)過程中,小車實(shí)際行走軌跡受到諸多因素的影響,主要有小車轉(zhuǎn)彎重心的變化、賽道接觸面摩擦力的變化、賽道路面平直度的變化、細(xì)線在不同階梯的繞軸運(yùn)動(dòng)使小車加速時(shí)瞬時(shí)速度的變化等,這些因素對(duì)軌跡產(chǎn)生了影響。行走機(jī)構(gòu)為三個(gè)輪子,而直接影響小車運(yùn)動(dòng)時(shí)所受的摩擦力大小的因素有輪子的大小、材料、厚度的選取,而這些因素對(duì)軌跡又有著不可避免的影響。
2.2 小車行走軌跡的計(jì)算及速比的分配
在行走過程中,靠近轉(zhuǎn)彎中心一側(cè)車輪軌跡長(zhǎng)度,永遠(yuǎn)小于遠(yuǎn)離轉(zhuǎn)彎中心一側(cè)車輪軌跡長(zhǎng)度,所以選取前輪與兩后輪軸的中間點(diǎn)作為基準(zhǔn)點(diǎn)來研究軌跡,且開始行走后,完全處于開環(huán)狀態(tài),考慮一級(jí)齒輪減速比太大導(dǎo)致大齒輪直徑過大[2],因此,小車的實(shí)際行走軌跡很難通過精確計(jì)算得到,只能假設(shè)一個(gè)理論軌跡來進(jìn)行估算。采用扇形軌跡估算方法,已知弦長(zhǎng)=1 m,弦高=0.3 m,則:
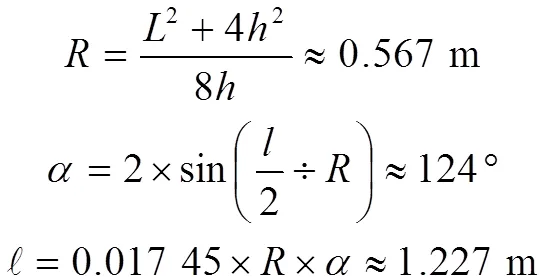

由此可得小車前輪左右偏擺1次,小車行走2倍的扇形弧長(zhǎng),因此小車行走一個(gè)周期的展開長(zhǎng)度約為2.45 m。在此過程中小車前輪完成向左和向右轉(zhuǎn)向各1次,以滿足小車重復(fù)繞障的要求。確定速比,假設(shè)后輪直徑選為150 mm,小車行走1個(gè)周期,后輪轉(zhuǎn)過的圈數(shù)=2.45/0.15π=5.2圈,即小車后輪與前輪轉(zhuǎn)向要通過1∶5.2倍的速比減速后,再驅(qū)動(dòng)前輪轉(zhuǎn)向,才能實(shí)現(xiàn)截距為1 m的重復(fù)繞障。
2.3 驅(qū)動(dòng)方式設(shè)計(jì)與分析
小車在行進(jìn)的過程中要繞過障礙物,周期性轉(zhuǎn)向、轉(zhuǎn)彎半徑最小時(shí),兩輪會(huì)產(chǎn)生差速[3],如果不采取任何措施的話,小車在轉(zhuǎn)彎的時(shí)候必定與地面產(chǎn)生滑動(dòng)摩擦,這樣既影響小車的軌跡和繞樁效果,也會(huì)有一定的能量損耗。以結(jié)構(gòu)最簡(jiǎn)原則和零件最少原則為參照,采取單輪驅(qū)動(dòng)方式,即斷開后輪主動(dòng)輪與從動(dòng)輪的剛性連接,只使主動(dòng)軸與主動(dòng)輪連接,從動(dòng)輪通過軸承的形式與支座相連,進(jìn)而斷開與主動(dòng)軸的約束,只在行走過程中配合主動(dòng)輪完成軌跡,以便于自動(dòng)調(diào)節(jié)旋轉(zhuǎn)速度,盡可能實(shí)現(xiàn)差速器的效果,降低對(duì)軌跡的影響,保證行車的平穩(wěn)性。而傳動(dòng)方式必須緊密配合并且傳動(dòng)效率比較高,經(jīng)過考慮及實(shí)際的測(cè)試,用一級(jí)齒輪減速為基礎(chǔ),齒輪傳動(dòng)作為主動(dòng)軸與后輪軸的傳動(dòng)方式,而重物與主動(dòng)軸的傳動(dòng)用錐面繞線軸與雙聯(lián)輪以繞線方式傳動(dòng),能夠保證在傳動(dòng)比不變的情況下改變后輪的驅(qū)動(dòng)力,從而改變小車的行進(jìn)速度,獲得更長(zhǎng)的行進(jìn)距離。
各級(jí)傳動(dòng)比:雙聯(lián)輪=3、齒輪=5,砝碼下降長(zhǎng)度(mm)/小車行走長(zhǎng)度(mm)為400/20 000。
小車最大理論行走長(zhǎng)度:驅(qū)動(dòng)輪摩擦系數(shù)為0.014,小車質(zhì)量為1.5 kg,總能量為4 J,則小車?yán)碚撀烦?4/(0.014×1.5×9.8)=20,則小車?yán)碚撐灰?2/2.45=16 m。小車距出發(fā)線最大理論距離為300 mm。
轉(zhuǎn)矩設(shè)計(jì)數(shù)據(jù)、各級(jí)轉(zhuǎn)矩及摩擦力矩分析,后輪摩擦力矩:后輪1=78×0.014×15=16,小齒輪與后輪同軸2=16,滑輪3=10×10=100,主動(dòng)軸4=20×(10/30)×10=66。
采用齒輪傳動(dòng):傳動(dòng)比為1∶5,重錘質(zhì)量為1 kg。重錘下落時(shí)主動(dòng)軸的力矩3=66。
采用齒輪機(jī)構(gòu)是依靠齒輪齒廓直接接觸來傳遞空間任意兩軸間的運(yùn)動(dòng)和方向,并具有傳遞功率范圍大、傳動(dòng)效率高、傳動(dòng)比準(zhǔn)確、使用壽命長(zhǎng)、工作可靠等特點(diǎn),小車驅(qū)動(dòng)機(jī)構(gòu)如圖5所示。
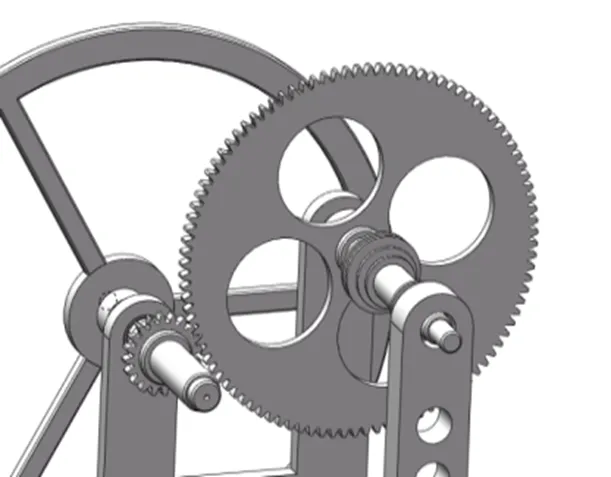
圖5 小車驅(qū)動(dòng)機(jī)構(gòu)圖
3 “S”形無碳小車轉(zhuǎn)向機(jī)構(gòu)設(shè)計(jì)
3.1 前輪轉(zhuǎn)向機(jī)構(gòu)需考慮的問題
依據(jù)三輪小車結(jié)構(gòu)前輪為導(dǎo)向輪,通過軸承,前叉以及各種標(biāo)準(zhǔn)件等零件結(jié)構(gòu)與連桿機(jī)構(gòu)連接實(shí)現(xiàn)前輪周期性擺動(dòng),在調(diào)試與行進(jìn)過程中,前輪轉(zhuǎn)向角度大小的調(diào)節(jié)和前輪向左或向右角度對(duì)中性的調(diào)節(jié)、制作誤差、零件的配合程度都直接影響“S”形軌跡。
要想使小車的行進(jìn)軌跡在設(shè)計(jì)好的弧長(zhǎng)內(nèi),就要通過調(diào)節(jié)角度的大小來完成周期繞障。調(diào)節(jié)的角度過小,小車行走軌跡會(huì)超出設(shè)計(jì)周期;調(diào)節(jié)的角度過大,小車行走軌跡會(huì)不足設(shè)計(jì)周期。而且小車在加工制作、裝配調(diào)試過程中也存在積累誤差,使小車前輪在行走時(shí),左右偏擺存在不對(duì)稱性,不能按照設(shè)計(jì)預(yù)期,即圍繞障礙物中軸線,左右對(duì)稱繞障運(yùn)行,小車行走軌跡與誤差軌跡如圖6所示。
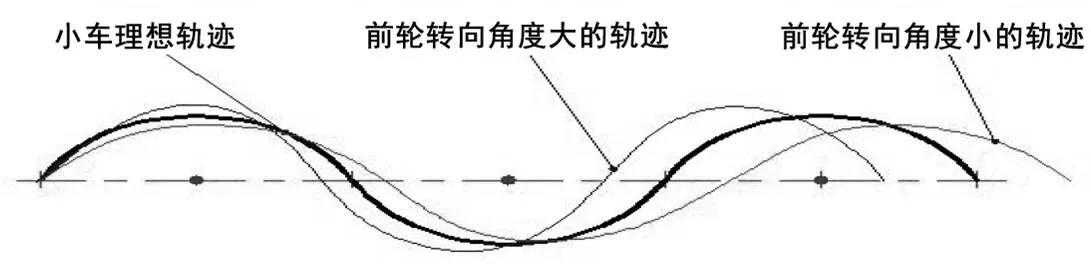
圖6 小車行走軌跡與誤差軌跡
3.2 機(jī)構(gòu)設(shè)計(jì)方案與分析
通過對(duì)比曲柄搖桿機(jī)構(gòu)、空間四桿機(jī)構(gòu)、偏心輪搖桿機(jī)構(gòu)等,在對(duì)配合精度、傳動(dòng)效率及拆裝難度的綜合考慮下,選取偏心輪搖桿機(jī)構(gòu),該機(jī)構(gòu)加工比較簡(jiǎn)單、調(diào)試容易、成本低、便于拆裝。在零件加工時(shí)盡量一次成型,不進(jìn)行二次加工,減少因多個(gè)基準(zhǔn)而造成的誤差[4]。
對(duì)前輪轉(zhuǎn)向角度大小的調(diào)節(jié),可根據(jù)偏心軸相對(duì)偏心輪中心的偏心距離來調(diào)節(jié),而前輪向左或向右角度對(duì)中性的調(diào)節(jié),可通過調(diào)節(jié)拉桿及連桿的長(zhǎng)度。零件制作誤差及配合程度誤差是系統(tǒng)必然性誤差,由于無法避免,可通過設(shè)計(jì)微調(diào)裝置來調(diào)節(jié)微小變化數(shù)值,盡量減小或消除制作及裝配誤差。
3.3 偏心輪搖桿機(jī)構(gòu)設(shè)計(jì)
設(shè)計(jì)的偏心輪搖桿機(jī)構(gòu)如圖7所示,具有不同距離的偏心孔的偏心輪、偏心軸、魚眼軸承、微調(diào)裝置以及所用到的標(biāo)準(zhǔn)件組成。剛性連接的偏心輪分布有距離輪心,類似阿基米德螺旋線分布的孔,偏心軸通過連接不同的孔,來改變偏心距,進(jìn)而改變前輪偏角。這樣設(shè)計(jì)方便調(diào)節(jié)偏心軸到軸心的距離,從而改變前輪轉(zhuǎn)向角度大小問題,做到具體數(shù)值精度調(diào)節(jié)。而且當(dāng)前輪轉(zhuǎn)向角度大小確定之后,也能通過調(diào)節(jié)微調(diào)裝置及魚眼軸承與桿件的配合長(zhǎng)度,來調(diào)節(jié)對(duì)中性,設(shè)計(jì)的調(diào)節(jié)方法簡(jiǎn)單、科學(xué)、方便。
4 結(jié)論
從設(shè)計(jì)到制作,再到裝配及調(diào)試過程中,都會(huì)存在系統(tǒng)誤差和人為誤差,通過不斷發(fā)現(xiàn)問題、解決問題,得出以下結(jié)論:①小車能否跑得更遠(yuǎn),近似跑出預(yù)期軌跡,最大的影響因素存在于設(shè)計(jì)方面,繞線輪大小、主軸軸距的大小、速比的大小、凸輪或者偏心輪轉(zhuǎn)向機(jī)構(gòu)的選擇、前后輪大小的選擇都直接決定小車的軌跡。具體設(shè)計(jì)可比較各個(gè)機(jī)構(gòu)的利弊來選擇適合的機(jī)構(gòu),繼而根據(jù)設(shè)計(jì)思路、速度分配等設(shè)計(jì)其他結(jié)構(gòu)。②加工誤差是不能避免的,但可以盡量減小,零件加工質(zhì)量好會(huì)省出時(shí)間來給后面的裝配調(diào)試工作;其他運(yùn)動(dòng)部件與靜止部件的裝配間隙的大小均會(huì)對(duì)小車的運(yùn)行軌跡產(chǎn)生一定的影響[5]。③微調(diào)裝置一定要有,設(shè)計(jì)的微調(diào)裝置要精密,能做到微小的調(diào)節(jié)。④調(diào)試過程中,充分考慮場(chǎng)地環(huán)境及材料、小車的整體情況,并認(rèn)真做好每一次小車行走軌跡的數(shù)據(jù)記錄。
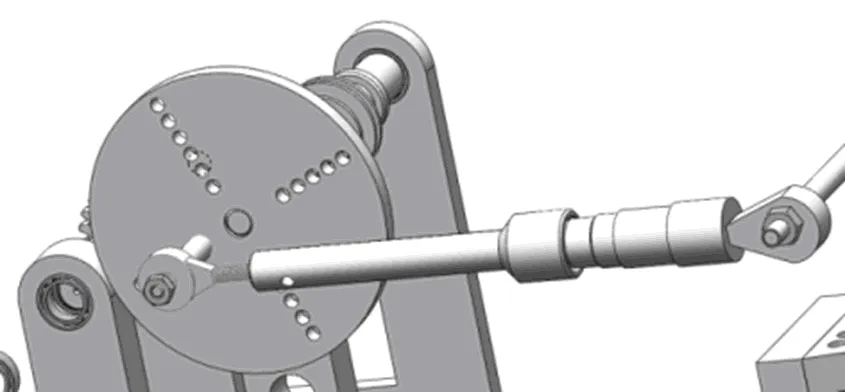
圖7 偏心輪搖桿機(jī)構(gòu)
5 結(jié)束語
轉(zhuǎn)向機(jī)構(gòu)是小車的關(guān)鍵機(jī)構(gòu),是讓小車在前進(jìn)的軌跡運(yùn)行過程中能否實(shí)現(xiàn)周期性運(yùn)動(dòng)的重要保證。此次設(shè)計(jì)采用了偏心輪搖桿機(jī)構(gòu),實(shí)現(xiàn)了小車在行駛過程中前輪能左右周期性地轉(zhuǎn)動(dòng),該機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、調(diào)試方便。
[1]張井洋,王恒廠,陳春陽(yáng).S形無碳小車結(jié)構(gòu)優(yōu)化設(shè)計(jì)[J].機(jī)電信息,2015(36):154-155.
[2]陳銳.無碳小車S形轉(zhuǎn)向運(yùn)動(dòng)的設(shè)計(jì)方案與改進(jìn)思路研究[J].南方農(nóng)機(jī),2015,46(5):24-26.
[3]李立成,徐漫琳,柯昌輔.S形無碳小車結(jié)構(gòu)設(shè)計(jì)[J].機(jī)械研究與應(yīng)用,2015,28(3):152-154.
[4]趙鵬飛,孫庭偉,賈雨超,等.無碳小車設(shè)計(jì)及誤差補(bǔ)償?shù)挠懻摚跩].科技視界,2014(12):22-23.
[5]康渝佳,周浩,付昌勝,等.基于連桿機(jī)構(gòu)的S形無碳小車微調(diào)方案[J].科技風(fēng),2017(12):3-4,12.
TG659
A
10.15913/j.cnki.kjycx.2020.09.002
2095-6835(2020)09-0004-03
北部灣大學(xué)大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃資助項(xiàng)目(編號(hào):201911607008,201911607065,201911607147);欽州市“互聯(lián)網(wǎng)+先進(jìn)制造”工程技術(shù)研究中心主任課題(編號(hào):2017QGZ05);2018年教育部第二批產(chǎn)學(xué)合作協(xié)同育人項(xiàng)目“智能制造背景下機(jī)電一體化專業(yè)人才培養(yǎng)模式的改革與實(shí)踐”(編號(hào):201802345001);教育廳高校科研項(xiàng)目“基于數(shù)字檔案館平臺(tái)的高校國(guó)有資產(chǎn)檔案利用優(yōu)化研究”(編號(hào):2019KY0474);2017年廣西職業(yè)教育教學(xué)改革研究項(xiàng)目“‘互聯(lián)網(wǎng)+’背景下職業(yè)技能訓(xùn)練平臺(tái)建設(shè)研究與實(shí)踐——以欽州學(xué)院為例”(編號(hào):GXGZJG2017A003);2017年教育部產(chǎn)學(xué)合作協(xié)同育人項(xiàng)目“工程訓(xùn)練之‘互聯(lián)網(wǎng)+焊接’基地建設(shè)”(編號(hào):201702119090);欽州學(xué)院2017年校級(jí)科研項(xiàng)目“風(fēng)電塔架結(jié)構(gòu)S355NL鋼的焊接工藝研究”(編號(hào):2017KYQD212);2018年度欽州學(xué)院本科教改項(xiàng)目(編號(hào):18JGZ023);2019年北部灣大學(xué)本科教改項(xiàng)目(編號(hào):19JGZ055,19JGZ076);2020年廣西高等教育自治區(qū)級(jí)教學(xué)成果獎(jiǎng)重點(diǎn)培育項(xiàng)目“依托高校實(shí)踐基地多元協(xié)同構(gòu)建‘五位一體’工程實(shí)踐教學(xué)體系的研究與實(shí)踐”(編號(hào):18JPZ008);2020年廣西高等教育自治區(qū)級(jí)教學(xué)成果獎(jiǎng)培育項(xiàng)目“基于工程實(shí)踐能力培養(yǎng)的實(shí)踐課程教學(xué)模式改革研究與實(shí)踐”(編號(hào):19CGPY12)
劉科明(1989—),男,廣西貴港人,學(xué)士,工程師、高級(jí)技師,主要從事機(jī)械工程和教育教學(xué)管理等方面的研究。
〔編輯:張思楠〕
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
