基于應力分析法的水下液壓機械手控制器可靠性預計*
2020-06-01 13:16:30趙嘉媛
科技與創新 2020年9期
趙嘉媛
基于應力分析法的水下液壓機械手控制器可靠性預計*
趙嘉媛
(湖北三峽職業技術學院 機電工程學院,湖北 宜昌 443002)
水下液壓機械手可以替代人類在深水環境下進行危險和復雜的工作,是水下航行器完成水下作業最主要的執行機構,機械手控制器根據水下航行器指控中心發布的命令完成機械手協調和指揮操作,其可靠性水平關系到水下航行器的安全性、可靠性。將可靠性理論中的應力分析法應用到某型水下液壓機械手控制器可靠性預計過程中,并給出了實例。
水下液壓機械手;控制器;應力分析法;可靠性預計
機械手是水下無人航行器ROV或UUV的重要組成部件,有了水下機械手,水下無人航行器就可以完成復雜的水下作業,如水下救生與打撈、海底樣本采集以及國防軍事領域等,水下機械手是國內外研究熱點之一[1]。水下液壓機械手是涉及機械、電氣、控制、液壓等多門交叉學科的產品,其組成較為復雜,是較為典型的機電液結合產品。隨著水下航行器機械的功能越來越復雜、智能化程度越來越高、技術高端化和先進化,其組成和系統越來越復雜,對水下航行器機械手的可靠性要求也越來越高,因此對其可靠性研究有重要的現實意義。
水下使用液壓系統不同于陸上和航空中使用液壓系統,其特殊性主要為:水下液壓系統應具有承受一定海水外壓的強度,以適應不同水下無人航行器工作水深壓力變化對液壓系統結構和液壓系統自身工作壓力的要求;為滿足水下無人航行器結構布置和質浮心要求,一般要求液壓系統質量較輕,體積較小;為避免液壓油泄漏而污染海洋環境、漏油使水下機器人質量和浮力發生變化,水下環境對液壓系統的密封要求更高;海水腐蝕性對結構的耐腐蝕性能要求更高,以滿足水下無人航行器在海水中、海洋飛濺區和海洋大氣環境下長時間工作的要求[2]。
1 某型水下航行器液壓機械手控制器
某型水下液壓機械手系統采用分布式控制方式,相對于集中式控制系統,其具有的優點如下:①高可靠性。水下機器人中某個執行機構控制器出現故障時,不會導致水下機器人內其他功能的喪失。②便于維護。當水下機器人的某個執行機構控制器出現故障時,能快速找到故障原因,且在不影響水下機器人調試的情況下更換液壓機械手控制器以迅速排除故障[3]。
水下液壓機械手控制器原理如圖1所示,所控制的機械手具有伸縮、擺動、鎖緊等3個方向的液壓缸動作,液壓系統中使用了3個電磁閥,機械手控制器通過控制電磁閥、直流無刷電機,間接控制油缸和油泵,實現水下機械手伸縮、擺動等運動功能。控制器采用旋轉電位計、直線電位計等測量伸縮、旋轉液壓缸的伸縮長度、擺動角度,并通過AD轉換將長度模擬信號、擺動角度模擬信號轉換為數字信號,經控制器計算后將控制量通過DA、線性隔離驅動液壓閥實現液壓機械手各關節的動作,主要功能有AD、DA、IO、CAN通信接口及輔助電路。
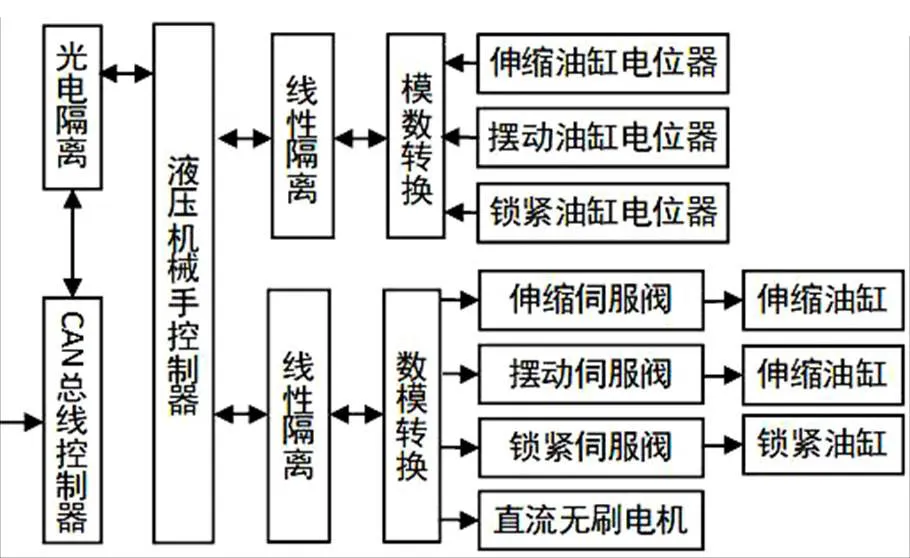
圖1 某型水下液壓機械手控制器原理圖
2 可靠性應力分析預計法
可靠性預計是預估產品在預定工作條件中的可靠性設計值,一般在產品設計完成后、開展可靠性實驗前對可靠性指標進行預計,可靠性預計根據組成單元的元器件、零部件來進行估計,隨著設計和研制過程的逐步開展,獲得的信息增加,可靠性預計也將更接近產品可靠性設計真值。
可靠性預計的作用和用途如下:經過可靠性預計,可以快速確定產品設計是否滿足規定的可靠性指標要求,一般實際產品較難達到規定的可靠性指標要求;在產品設計過程中,可通過預計找出薄弱環節,通過采取設計措施,提高影響產品可靠性主要單元的可靠性水平,從而達到提高產品可靠性的目的;可用來設置產品出廠前可靠性試驗目標值,也可為可靠性增長試驗、可靠性鑒定等提供憑據;根據可靠性預計和產品工作狀態的不同情況,預計維護保養頻率、備品備件數量。
可靠性預計的方法有很多種,不同的產品、不同的研制階段應使用不同的可靠性預計方法。目前工程上比較常用的可靠性預計方法有評分法、相似產品法、元器件計數法、元器件應力分析法、上下限法、應力-強度干涉法等。在開展可靠性預計工作時,相應的可靠性預計標準、手冊是非常寶貴的借鑒工具,這些標準、手冊大多數是根據不同元器件、部件進行大量試驗得出的參考數據,常用的預計標準有HDBK-217F和GJB299C電子產品可靠性預計手冊、RDF2000法國電信設備可靠性預計手冊、HRD5英國電子元器件可靠性數據手冊、SR-332貝爾電信設備可靠性預計手冊,工程上常用的可靠性預計方法的應用條件和適用階段如表1所示[4]。
表1 常用可靠性預計方法的應用條件和適用階段
可靠預計方法預計參數應用條件適用階段 相似產品法MTBF,λ,Rm(t)具有相似產品的可靠性數據論證、方案、工程設計 評分預計法MTBF,λ需要有經驗的技術專家和專家參與可靠性設計工作論證、方案、工程設計 元器件計數法λ,Rm(t)已基本確定元器件種類、數量、質量等級和工作環境,能找到相關的數據研發階段早期 應力分析法λ,Rm(t)已基本確定元器件種類、數量、質量等級等,能找到相關的數據手冊,可提供經驗公式和數據研發階段中后期 應力-強度干涉模型R已基本確定材料型號、強度大小、應力大小等,能找到相關的數據手冊,可提供經驗公式和數據研發階段中后期
由表1可知,應力分析法適用于電氣原理圖、電路及各元器件的環境應力都已明確,產品設計基本完成時。應力分析法時以元器件的基本失效率為基礎,根據元器件工作環境、質量等級和工作環境應力,乘以相應的修正系數即可預計產品中元器件的工作失效率,進一步可以得出部件的失效率,最后得到產品的失效率或可靠度。
應用應力分析方法進行可靠性預計所需要的設計數據包括電子產品所選用的元器件種類、選用的元器件數量、選用元器件的質量等級、產品的工作環境、選用元器件的使用應力。一般國產元器件查閱GJB299C,進口元器件可查詢MIL-HDBK217F或相應的元器件手冊中失效率數據[5]。
根據應力分析法進行可靠性預計的計算過程較為煩瑣,不同類型的元器件有著不同的故障率計算模型,如普通二極管的工作失效率的計算模型[6]為:
p=bπEπQπrπAπS2πC(1)
式(1)中:p為元器件工作失效率,10-6/h;b為元器件基本失效率,10-6/h;πE為電子產品工作的環境系數;πQ為元器件質量系數;πr為二極管額定電流系數;πA為應用系數;πS2為二極管電壓應力系數;πC為二極管結構系數。
3 基于應力分析法的水下液壓機械手控制器可靠性預計
應用電子元器件可靠性預計軟件可方便快捷地進行電子設備的可靠性預計,下面結合實例介紹應用Relax 軟件進行電子設備的應力分析預計。Relax可靠性預計軟件中電阻的應力分析法軟件設置如圖2所示。
控制器中電子元器件種類較多,現以電容為例,簡要介紹電子元器件應力分析法可靠性預計方法,由GJB299C可知,1類、2類瓷介質電容工作失效率預計模型為p=bπEπQπCVπch,固態鉭電容工作失效預計模型為p=bπEπQπCVπSRπch,電容失效率預計如表2所示。
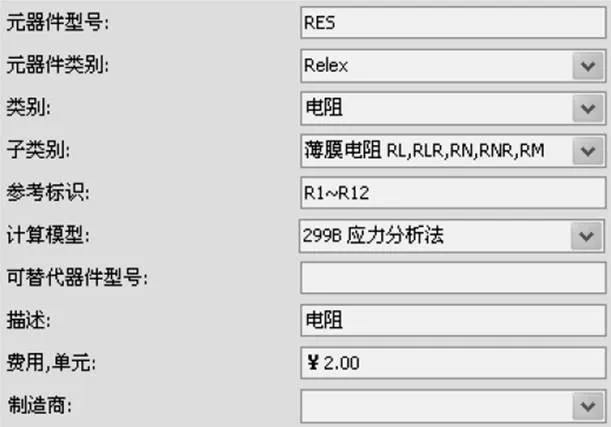
圖2 Relax可靠性預計軟件中電阻的應力分析法軟件設置
表2 液壓機械手控制器中電容失效率預計
元器件類別型號規格Sλbπchλb數量λp 2類瓷介電容C≤240 pF0.20.017 214.940.008 42 2類瓷介電容0.003 3 uF<C≤0.016 pF0.20.017 214.940.016 86 2類瓷介電容0.082 uF<C≤0.27 uF0.20.017 214.9320.215 76 2類瓷介電容0.27 uF<C≤0.75 uF0.20.017 214.980.064 06 固體鉭電容15 uF<C≤47 uF0.20.005 814.960.033 26 合計 0.338 34
同樣,由GJB299C相關數據可得到液壓機械手控制器中半導體分立器件、光電耦合器、微電子元器件、繼電器、電連接器、電源濾波器、晶振、電源轉換器、印制電路板、焊點等相關電子元器件的失效率預計數據,具體預計數據如表3所示。
由于電子產品的壽命服從指數分布,()=-λt,因此可以計算出液壓機械手任務剖面在15 min內,其工作任務可靠度為:

表3 水下液壓機械手控制器中電子元器件失效率預計
序號元器件種類λp/(10-6/h)序號元器件種類λp/(10-6/h) 1電阻0.638 48電源濾波器2.08 2電容器0.338 349晶振1.925 3半導體分立器件0.721 4410電源轉換器2.775 4光電耦合器0.729 94511印制電路板0.219 15 5微電子元器件1.007 6712焊點0.356 46 6繼電器0.290 3合計12.243 52 7電連接器1.161 81
4 結論
本文以某型水下液壓機械手控制器為例,應用可靠性應力分析方法,說明了水下液壓機械手控制器可靠性預計方法的應用。經過該型水下航行器多次試驗,其水下液壓機械手控制器未發生一次故障,證明所介紹的可靠性預計方法有效,有力保障了水下作業的可靠性、安全性。
[1]劉兵.水下作業機械手液壓系統及機械手控制技術研究[D].哈爾濱:哈爾濱工程大學,2015.
[2]付孟博.水下生產系統控制模塊研究及可靠性分析[D].哈爾濱:哈爾濱工程大學,2017.
[3]廖道爭,施保華.計算機控制技術[M].北京:機械工業出版社,2016.
[4]楊為民.可靠性·維修性·保障性總論[M].北京:國防工業出版社,1995.
[5]曾聲奎.可靠性設計與分析[M].北京:國防工業出版社,2011.
[6]張增照,潘勇.電子產品可靠性預計[M].北京:科學出版社,2017.
U462.3+5;TH122
A
10.15913/j.cnki.kjycx.2020.09.018
2095-6835(2020)09-0049-03
宜昌市應用基礎研究項目(編號:A19-302-19)
趙嘉媛(1986—),女,碩士,講師,研究方向為機械設計、可靠性設計與分析。
〔編輯:嚴麗琴〕
