基于移相技術的改進等精度測頻法
2020-06-02 12:53:04李海生
山西大同大學學報(自然科學版) 2020年2期
李海生
(長治學院電子信息與物理系,山西長治 046011)
頻率作為脈沖信號的關鍵參數,在很多時候需要測量其精確值。如在航空領域,諧振式壓力傳感器常用來測量飛行器高度和空速,其輸出的信號就是頻率信號,獲取實時準確壓力值的關鍵就在于頻率測量的響應速度和準確性[1-2]。在地質勘探和醫療檢查等領域廣泛使用的磁探測技術中,光泵磁力儀作為磁梯度探測的常用探頭,其信號輸出也是方波,其頻率值與磁場值成比例,磁場的測量精度也取決于頻率的測量[3-4]。隨著電子技術和集成電路工藝的發展,信號頻率不斷提高,傳統的頻率測量方法已經滿足不了越來越高的測量精度要求[5]。本文通過對傳統頻率測量方法的分析比較,結合最新的技術發展,提出了一種基于等精度頻率測量的改進型方法,可以使得基于現有的硬件運行最高速度上再提升幾倍測量精度。
1 頻率測量方法
在現代測頻技術中,頻率測量一般采用電子計數法較多,通過電子計數器對周期信號在單位時間內變化次數的計數,從而得到其頻率值。測量頻率一般常用的三種方法,分別是測頻法、測周法和等精度測頻法[6]。
1.1 測頻法
測頻法是通過在一定閘門時間T0內對被測信號進行頻率計數,通過得到的計數值Nf來計算被測信號的頻率fx,其計算方法:

當T0取1s 時,計數值Nf就是被測信號的頻率。但由于閘門時間T0無法與被測信號同步對齊,可能存在±1的計數誤差,這種頻率量化到來的誤差又稱為量化誤差,用相對誤差表示為:

這種測量方法的精度主要取決于計數誤差,當T0一定時,由式(2)可知,相對誤差與被測信號的頻率fx反比,當測量的信號越大時,測量的相對誤差就越小,所以測頻法適用于高頻信號的測量[7]。
1.2 測周法
測周法也叫周期測頻法,是將被測信號的周期作為計數的閘門時間,對標準信號fs的脈沖計數來得到測量信號的周期。當閘門寬度是被測信號的一個周期Tx時,通過計數的結果Nt就可以計算出被測信號頻率fx,即

測周法有類似于測頻法的±1的計數誤差,表示為:

由式(4)可知,當標準信號周期fs一定時,測周法的相對誤差是隨著測量頻率的減小而減小,故此方法適合測量低頻信號[7]。
1.3 等精度測頻法
等精度測頻法是測頻法的延伸和改進,是利用閘門時間對被測信號和標準信號同時進行脈沖計數,不過這個閘門時間是不確定的值,而始終保持為被測信號周期的整數倍[8]。
在等精度測頻中,通過閘門信號來控制兩個計數器分別對被測信號為fx和標準時鐘信號fs進行計數,得到計數結果分別為Nx和Ns。那么被測信號頻率為:

在測量過程中,預置閘門信號開啟時(即預置閘門上升沿到來),兩個計數器并不馬上開始進行計數,而是等被測信號fx的上升沿到來時,計數器才真正開始工作[9]。同樣,在預置閘門信號關閉時,計數器也不立即停止工作,而是等被測信號fx的最近一個上升沿到來時才結束計數,完成一次測量,測量的時序關系如圖1所示。

圖1 等精度測頻時序圖
由圖1可以看到,實際閘門信號時間τ并不一定是預置閘門時間τ0,而是根據被測信號fx微調整過的,前提是保證每次閘門信號有效時間是被測信號周期的整數倍,即:

因此,這種方法有效的避免了對被測信號計數Nx所產生的±1的計數誤差,不會出現類似于測頻法的低頻精度差,高頻精度高的現象。在忽略標準信號fs本身誤差(晶振等產生的誤差),此時精度測頻法的誤差主要來源于對標準時鐘信號計數Ns的±1誤差[10],相對誤差為:

通過式(7)可知,測量頻率的相對誤差與被測信號頻率無關,僅與實際閘門時間τ和標準時鐘信號fs有關,所以說是等精度測頻法的測量精度在整個測試頻段內都是一樣的,不會隨測量頻率而改變。
2 基于移相技術的等精度測頻法原理
等精度測頻法作為常用的一種頻率測量方法,其測量精度不受測量信號頻率的影響,只和計數的閘門時間和標準時鐘頻率有關。由于延長計數閘門時間會影響到測量的實時性,所以只能通過提高標準時鐘信號的頻率來提高測量精度。盡管利用FPGA 里的倍頻技術可以將晶振時鐘提高到幾百兆,但由于FPGA 最高工作頻率的限制,達到硬件的極限后無法繼續再提高。
通過采用移相技術,使用多路移相的同頻時鐘,同時進行頻率測量計數,這種改進型方法可以在等精度測量的基礎上進一步提高測量精度。其原理是將標準時鐘信號fx進行移相產生多路時鐘信號,在閘門時間內,多路時鐘信號同時進行計數,由于幾路時鐘信號有相位差,可以減小Ns的±1計數誤差,從而將測量精度提高幾倍[11-12],基于4路移相時鐘的等精度測頻時序如圖2所示。
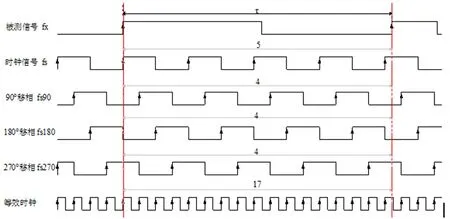
圖2 基于4路移相時鐘的等精度測頻時序圖
在圖2 中,4 路標準時鐘信號fs,fs90,fs180,fs270是同頻時鐘,相位分別是0°,90°,180°,270°,這4路時鐘在閘門時間τ內同時進行計數,計數值分別為5,4,4,4,其和為17,通過除以時鐘數得到較為精確的計數值為4.25,與一路時鐘相比,精度提高了4倍。如果同頻時鐘增加到m路的話,其每路時鐘相移為2π/m,第k路時鐘的計數結果為Nk,則最后頻率測量計數結果為;

將式(8)代入到式(7)可得,改進的等精度測頻法的相對誤差為;

采用m路不同相位的時鐘信號進行等精度測頻,其測量精度相比于傳統的一路時鐘測量,可以提高m倍。
3 測頻系統的設計驗證
通過采用FPGA 和單片機相結合,設計了頻率測量系統,對改進型的等精度頻率測量方法進行實驗驗證。FPGA 選用Altera 公司低成本、低功耗的Cyclone IV 系列芯片EP4CE15E22C8N,單片機選用32位的處理器STM32F103RCT6。先通過FPGA完成外部脈沖信號的頻率計數,再將得到的頻率數據通過RS232整體打包發送給單片機進行數據處理和參數信息顯示,頻率測量系統設計框圖如圖3所示。

圖3 頻率測量系統框圖
采用時鐘倍頻技術和時鐘移相技術相結合,在FPGA對改進的等精度測頻法進行了驗證。由外部晶振給FPGA 提供50 MHz 的時鐘輸入,經FPGA 內部的PLL 倍頻和移相,產生4 路相位分別為0°,90°,180°,270°的250MHz 標準同頻時鐘信號clk_250M_0,clk_250M_90,clk_250M_180,clk_250M_270。通過閘門信號T0_gate 控制被測信號計數器fx_cnt 和4 個不同相位的時鐘信號計數器fbase0_cnt,fbase90_cnt,fbase180_cnt,fbase270_cnt的工作,從而完成頻率測量計數,在ModelSim的仿真時序圖如圖4所示。

圖4 基于改進的等精度測頻法的仿真時序圖
當FPGA 監測到單片機發送的開始工作信號Start_sig后,FPGA就開始進行一次頻率的測量,并根據被測信號fx對預置閘門信號T0_gate進行調整,確保調整后的實際閘門信號Real_gate的有效時間τ是被測信號周期的整數倍。在閘門時間內,被測信號計數器和4 個標準時鐘計數器完成頻率的計數。當閘門信號結束后,計數器都停止工作,輸出計數值,FPGA 發送測量完成信號Done_sig 給單片機,并把數據通過串口發送給單片機,單片機完成數據的處理和信息顯示,至此測量系統完成一次頻率測量,接著FPGA等待下一次的開始測量信號。
在圖4 的仿真時序圖中,輸入信號fx的周期是30.6 ns,4路標準時鐘信號周期是4 ns,為了仿真方便,預置閘門時間τ設置為100 ns,而實際閘門信號是Real_gate,根據仿真結果可以看到,有效時間調整成了3倍的被測信號周期。Nx的計數值3,4路標準時鐘信號計數值分別為22,23,23,23,通過式(8)計算可得得到計數結果Ns是22.75,代入到式(5)可得被測信號的周期約是30.33 ns。由式(9)可知理論的相對誤差為1%,實際測量的相對誤差為0.87%,相比于一路時鐘進行等精度測量,測量的精度提高了4倍。
預置閘門有效時間τ取1 μ s 時,改進的等精度測量系統相對誤差可達0.1%.。τ的取值會影響到測量的相對誤差,一般τ至少是大于被測信號的一個周期。當τ太小會在測量低頻信號時,測量的相對誤差會比較大。太大會影響到頻率測量的動態響應,導致測量周期變長,無法實時反映出頻率的變化,所以,一般根據實際應用場景擇中選擇。
4 結語
通過利用鎖相環的倍頻和移相技術,對傳統的等精度測頻法進行了改進,采用多路移相的同頻時鐘同時完成測頻計數,相比于原有的測量精度可以提高多倍,在器件工作最高頻率的限制的基礎上提高測量精度。最后使用FPGA和單片機設計了頻率測量系統,通過在FPGA 上進行實驗驗證,設計的基于4路移相的同頻時鐘測量系統,其測量精度相比于傳統的等精度測量提高了4倍。此方法可以應用于動態的高頻信號的實時頻率測量中,同時,還可以用來精密時間間隔的測量,比如脈沖的上升沿和下降沿等,具有很廣泛的應用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00