基于物聯網的扶梯卡簧監控裝置制作
2020-06-02 07:03:18張習舟劉富海馮冠君許銘康嚴樂樂
時代農機 2020年2期
張習舟,劉富海,馮冠君,許銘康,謝 桔,嚴樂樂
(杭州職業技術學院,浙江 杭州 310018)
電扶梯是我們目前城市化生活中隨處可見的運載工具,遍布在人員聚集的各類公共場所,我國的電扶梯保有量、使用量也在世界上位居前列。然而因電扶梯運行故障而引發的扶梯墜落、方向突然逆轉、機械部件擠壓、與物體碰撞形成剪切力等事故給使用者帶來的危險也讓人觸目驚心,嚴重威脅了人民的出行安全。文章通過簡單分析電梯的自身結構與大體的事故類型,介紹卡簧這一主要零件在電扶梯中的關鍵位置,并來論證制作與安裝卡簧監控裝置的必要性。通過具體介紹卡簧監控裝置制作的總體結構設計、電路部分、機械部分以及物聯網APP測試功能,簡單分析該裝置如何通過物聯網技術,實現對于電扶梯動態運行的監控預警、實時數據傳輸與提前風險評估,進一步提高設備運行水準,最大限度地通過技術手段來緩解施工人員的工作壓力,良好地掌控電扶梯運行狀況。
1 電扶梯的基本構造與事故頻發類型分析
電扶梯主要由前端驅動主機進行動力供應,并有適宜大小的前端機房空間包含著電氣設備,為驅動主機的正常運作提供足夠的空間條件。從外觀上主要可以看到中間梯級與兩邊平行護欄,中間梯級屬于板式設備,同時護欄上遍布著與梯級運作保持同步的扶手系統,這屬于帶式設備。以上部件的支撐都是由大量金屬結構來完成,運作時由驅動主機帶動著無數條牽引鏈和梯級開始動力工作,電梯梯級踏板也都保持水平狀態,極大地提高了乘坐人員的舒適度。為了防止乘坐人員在登上和離開電扶梯時被卷入機械設備中,電梯的出入口位置上還被放置了前沿板,也叫作層站,同時銜接處也安裝了一定傾斜度的梳齒板,與梯級上的踏面梳齒彼此嚙合,極大限度地隔離人與機械設備的接觸,這些設計都讓乘坐人員可以安全的踏上或離開電梯梯級,使用中間梯路。
目前我國對于電梯的監控還只停留在對于運行狀態進行簡單監控的程度,大部分的事故發生都不能提前進行有效防控和預警,只能在事故發生以后進行彌補干預,安全隱患無法扼殺于搖籃之中。同時即使事故已經帶來了人員傷害,也很難及時有專業人員前往現場進行補救,無法立刻將電扶梯停電來停止其運行。所以,事先有效防控,及時掌控電梯運行數據,打破“監而不控”的局面,十分必要。
電扶梯的危險事故發生也有許多種案例:①電扶梯墜落,占事故的15%;②運行中發生的逆轉,占事故的9%;③與物體發生碰撞、剪切,占事故的15%;④機械部件之間的間隙產生的擠壓,占事故的43%;⑤跌倒,占事故的9%;⑥管理不善造成的其他事故,占事故的9%。縱觀這些觸目驚心的事故發生,極大部分是由于電梯自身部件出現老舊、破損、松動等導致的運轉不靈,故障突然發生,為人民的人身安全帶來了極大的威脅。而在這些零部件中,卡簧則屬于主要部件,也叫卡環或扣圈,屬于緊固件的一種,供裝在電扶梯設備的軸槽或孔槽中,起著阻止軸上或孔上的零件軸向運動的作用,在電扶梯上使用頻率十分龐大,同時由于卡簧松動、脫落而造成的事故也占比巨大,應該說保證了電梯中卡簧的正常安裝,就可以避免80%因機械設備故障而引發的事故,可以極大程度地提高運行安全度。
2 電扶梯卡簧監控裝置整體設計
由于電扶梯中卡簧數量十分龐大,而且正常卡簧脫落檢查時間一般是每半個月一次,所以對于卡簧的安全檢查工作十分繁瑣、重復且機械。同時在每次維修保護作業時都需要停止整個自動電扶梯的工作,再開始漫長的檢查環節,這對電梯的正常使用也帶來了很大的不便利性,運用傳統方式的檢查手段也因此缺少了時效性。每次開始檢查作業時,維保工人還需要進入自動扶梯的下機艙內部,自行攜帶手電筒進行照明,作業條件不佳,由于卡簧數目巨大,檢查工作繁瑣,人為疏忽所帶來的漏檢情況也時有發生,這無疑又在某種程度上加大了電扶梯事故發生的頻率。所以針對這些問題設計并制作了專門針對電扶梯卡簧的監控裝置,以下為相關設計思路。
2.1 總體結構設計
總體結構設計見圖1。
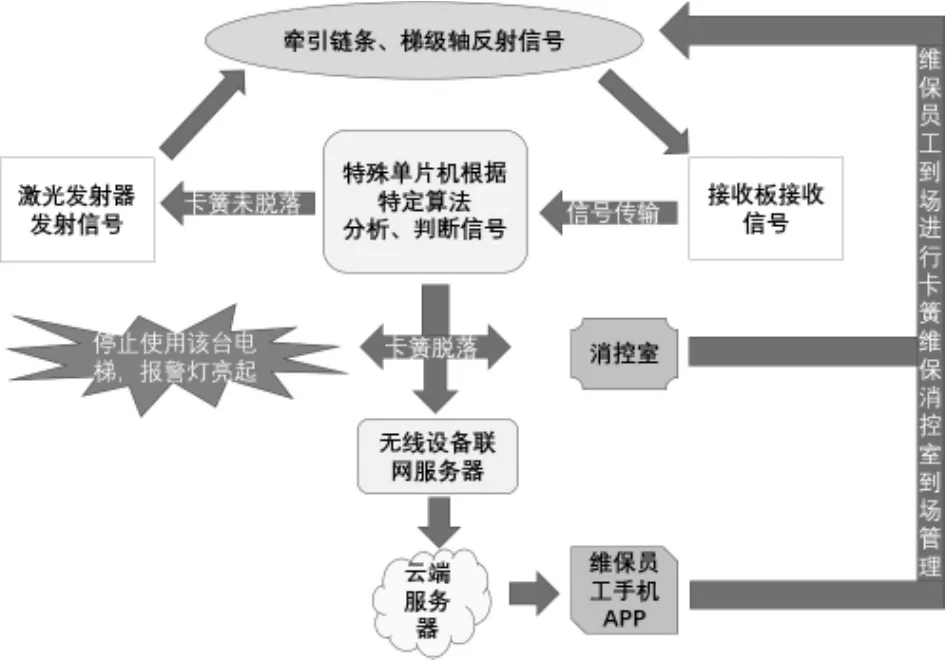
圖1總體結構設計
首先通過監控設備,實時監控電扶梯中的卡簧裝置,并連接特殊的單片機,根據特定算法,分析監控設備所傳來的信號數據,對卡簧的實時狀態進行判斷。如果判斷為卡簧未脫落狀態,則將指令發送至激光發射器處,進行信號發射,并利用紅外線激光傳感器,安裝在下游牽引鏈條和梯級軸處進行信號接收,接收到信號,便可以保持正常運作的狀態,電扶梯繼續正常運行,下游接收板也繼續接收信號,并將信息傳回至監控設備和單片機數據判斷系統,繼續檢測卡簧的運行狀態。
如果單片機接收到數據,并判斷卡簧此時為脫落狀態,將會同步開啟一下三種應對手段:①立刻將信息傳送至報警系統,報警燈亮起,同時電扶梯停止運作,禁止人員繼續使用;②將卡簧脫落的數據信息及時傳送至消控室,此時在消控室的維保員工將接收到信息指令,立刻前往現場進行人為干預和電扶梯維修;③將卡簧脫落的狀態實時傳送至無線設備聯網服務器,并將信息上傳至云服務器,經過數據分析處理后,發送至維保員工手機APP中對于員工進行有效提醒,這樣可以避免維保員工在外出時,對于電扶梯的監控疏漏,遠程便可以監控到電扶梯的運行狀態。
2.2 電路部分設計
本裝置的主要控制系統選擇了特殊單片機作為主控制器,電梯運行時,裝置系統也開始啟動運作,特殊單片機會對實時信號進行數據采集,通過紅外激光傳感器來實現,對采集的數據進行分析、判斷,將判斷結果通過轉換電路變成電壓,最終再依靠物聯網模塊將信息傳送至云端服務器,而后云端服務器將實現遠程管控,實時數據被發送至維保員工手機客戶端,信息便這樣傳遞到人,加入了人為干預和聯系。其中控制器主控芯片電路及紅外接收電路如圖2、圖3所示。

圖2控制器主控芯片電路
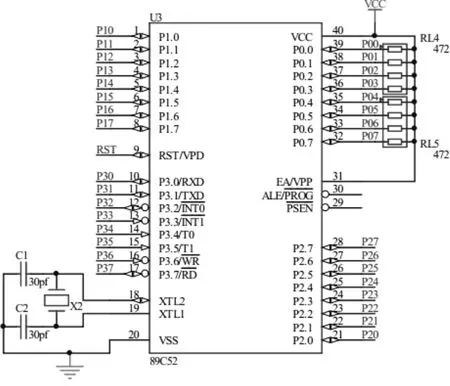
圖3紅外接收電路
2.3 機械部分設計
上述調節電路裝置被固定在扶梯桁架上的底座,采用緊固螺栓進行位置固定,并加入強力磁鐵緊固裝置減小震動,同時底部還設計了減震橡膠墊的安裝,極大程度地減少以上調節裝置因電扶梯運行而帶來的震動偏差。調節電路裝置還配備了位置調節裝置滑塊,通過光滑的圓柱導軌來實現位置對標移動,找到合適位置時,再擰緊滑塊上的緊固螺栓進行位置固定,同時為了更加準確地對電扶梯卡簧信息進行采集,裝置上還增加設計了角度微調裝置,進行采集角度的調節,增加裝置角度調節靈活性。其相應結構圖如圖4所示。

圖4位置調節裝置整體俯視圖
3 結語
如今物聯網技術的發展已經日新月異,在借助傳感器的基礎上,并加入圖像識別技術,并通過互聯網的手段,可以實現對數據的有效準確采集、研究分析和狀態評估。本裝置則是充分利用了物聯網技術的功能,同時加以巧妙的電路設計和機械設計,有效監控到電扶梯上的卡簧狀態,及時判斷是否松動,并將結果及時通過云服務器發送至維保人員,對電扶梯的正常運營起到了有效的安全監控、維護協助作用。如果將此裝置進行推廣,則還可以實現分散的電扶梯集中遠程管理效果,有效緩解維保人員維修不便捷、不及時、不準確等問題,為人們的安全出行生活保駕護航。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中國品牌(2019年10期)2019-10-15 05:57:12
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
電子制作(2017年19期)2017-02-02 07:08:27
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
