風(fēng)電場(chǎng)在可變風(fēng)速下對(duì)頻率的綜合控制策略
2020-06-03 00:43:38黃軍高
機(jī)械與電子 2020年5期
王 勇,黃軍高,管 荑,馬 強(qiáng),李 雷
(1.國(guó)網(wǎng)山東省電力公司,山東 濟(jì)南 250001;2.國(guó)網(wǎng)南京南瑞集團(tuán)公司(國(guó)網(wǎng)電力科學(xué)研究院),江蘇 南京 211106;3.國(guó)電南瑞科技股份有限公司,江蘇 南京 211106)
0 引言
風(fēng)電場(chǎng)(WPP)大規(guī)模并網(wǎng)引起的隨機(jī)波動(dòng)性對(duì)電力系統(tǒng)的頻率控制和調(diào)峰有著顯著的影響[1]。然而,由于WPP發(fā)電的復(fù)雜性,通常的風(fēng)力發(fā)電比例僅限制在配電網(wǎng)總功率的20%[2]。考慮到與WPP發(fā)電相關(guān)的問(wèn)題以及在大規(guī)模集成系統(tǒng)中難以消耗所產(chǎn)生的風(fēng)電,配電網(wǎng)會(huì)施加不同規(guī)模的電力約束條件[3]。既要提高WPP的頻率調(diào)節(jié)能力,又要充分利用減少的風(fēng)力,這已成為當(dāng)前風(fēng)力發(fā)電技術(shù)研究的重點(diǎn)[4]。為了解決這些問(wèn)題,WPP可以作為初次調(diào)頻備用電源并優(yōu)化風(fēng)電消耗。
針對(duì)滿(mǎn)足配電網(wǎng)的綜合要求研究[5-9]中,電力與頻率調(diào)節(jié)協(xié)調(diào)控制的研究卻很少。本文提出了一種風(fēng)力發(fā)電機(jī)在可變風(fēng)速下對(duì)頻率的綜合控制策略。將超速控制和變槳距控制相結(jié)合形成減載控制方法,還提出了與風(fēng)力發(fā)電機(jī)在高風(fēng)速下運(yùn)行的比例相關(guān)的靜態(tài)頻率差系數(shù)調(diào)整控制方案。采用功率分配策略?xún)?yōu)先原則,使用高風(fēng)速運(yùn)行的風(fēng)力發(fā)電機(jī)來(lái)滿(mǎn)足配電網(wǎng)的約束條件,并采用頻率控制來(lái)實(shí)現(xiàn)配電網(wǎng)在可變風(fēng)速下的正常運(yùn)行。通過(guò)對(duì)WPP和火電廠的電力系統(tǒng)進(jìn)行模擬,驗(yàn)證所提出的頻率控制策略的有效性。
1 WPP的有功功率控制
1.1 有功功率控制系統(tǒng)
針對(duì)WPP對(duì)配電網(wǎng)頻率控制和調(diào)峰的要求,其有功功率控制系統(tǒng)包括3個(gè)層級(jí),即:風(fēng)能管理層、WPP控制層和風(fēng)力發(fā)電機(jī)控制層,如圖1所示。
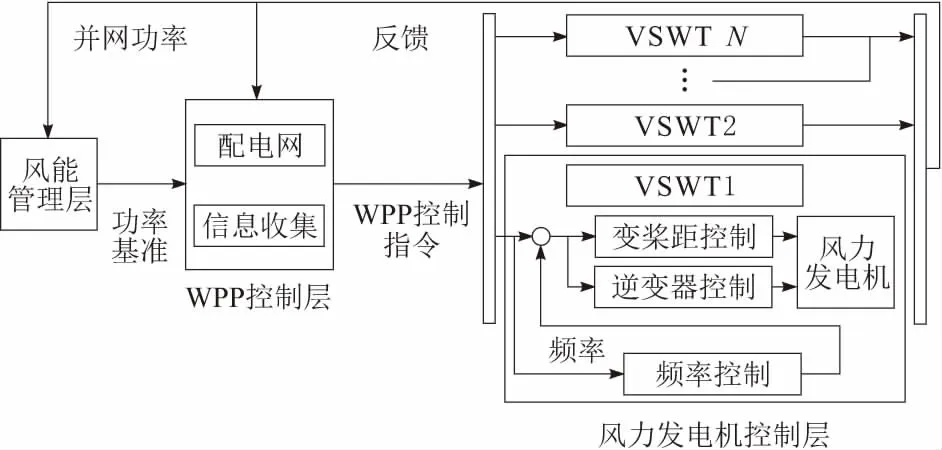
圖1 WPP的有功功率控制
由圖1可以看出,有功功率控制允許WPP在不同頻率模式下運(yùn)行,例如配電網(wǎng)施加的正常模式和約束模式。因此,可以根據(jù)不同的配電網(wǎng)要求選擇合適的模式。
1.2 VSWT簡(jiǎn)化模型
風(fēng)力發(fā)電機(jī)依靠葉片來(lái)捕獲風(fēng)能,并將其轉(zhuǎn)換為輪轂的機(jī)械扭矩,變速箱提高主軸轉(zhuǎn)速并將機(jī)械能傳遞給發(fā)電機(jī)。本文利用雙饋感應(yīng)發(fā)電機(jī)(DFIG)將機(jī)械轉(zhuǎn)矩轉(zhuǎn)換為電能,如圖2所示。
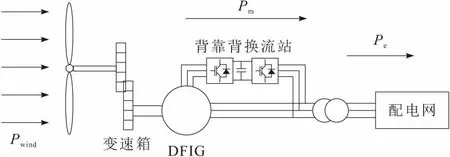
圖2 風(fēng)能轉(zhuǎn)換過(guò)程
考慮到能量損耗和傳輸效率,DFIG側(cè)的機(jī)械功率為:
(1)
(2)
Pm為發(fā)電機(jī)的機(jī)械功率;Cp為風(fēng)能利用率;v為風(fēng)速;R為葉片半徑;ρ為空氣密度;ωr為風(fēng)力發(fā)電機(jī)轉(zhuǎn)子轉(zhuǎn)速;λ為葉尖速比;β為槳距角。
根據(jù)式(1),當(dāng)風(fēng)速v和空氣密度ρ恒定時(shí),轉(zhuǎn)子吸收的功率僅取決于風(fēng)能利用率Cp。因此,可以通過(guò)改變Cp來(lái)調(diào)整VSWT的有功功率[10]。其中,高階非線(xiàn)性函數(shù)Cp為:
(3)
(4)
因此,當(dāng)風(fēng)速v恒定時(shí),Cp僅取決于葉尖速比λ和槳距角β。
VSWT可以在可變風(fēng)速下以恒定頻率運(yùn)行,從而使其轉(zhuǎn)速與配電網(wǎng)頻率分離。VSWT可以在較大的風(fēng)速范圍內(nèi)運(yùn)行(通常在±30%的范圍內(nèi)變化),并利用轉(zhuǎn)子的交流勵(lì)磁來(lái)補(bǔ)償機(jī)械轉(zhuǎn)速和同步轉(zhuǎn)速之間的差異。因此,可以通過(guò)調(diào)整定子的頻率來(lái)匹配配電網(wǎng)的頻率。矢量控制在發(fā)電機(jī)中的應(yīng)用可使大型風(fēng)力發(fā)電機(jī)的有功功率和無(wú)功功率控制實(shí)現(xiàn)解耦。VSWT模型如圖3所示。
VSWT簡(jiǎn)化模型可以表示為
(5)
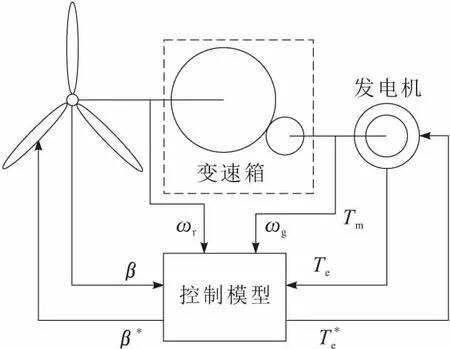
圖3 VSWT模型簡(jiǎn)化
Tm和Te分別為高速軸的機(jī)械轉(zhuǎn)矩和發(fā)電機(jī)的電磁轉(zhuǎn)矩ωg為發(fā)電機(jī)的轉(zhuǎn)速。
VSWT傳動(dòng)系統(tǒng)模型可以表示為
(6)
J為驅(qū)動(dòng)系統(tǒng)的轉(zhuǎn)動(dòng)慣量;B為轉(zhuǎn)動(dòng)粘度系數(shù)。因此,發(fā)電機(jī)的電磁功率可以表示為
Pe=Teωg
(7)
VSWT控制涉及基準(zhǔn)有功功率P*,發(fā)電機(jī)基準(zhǔn)轉(zhuǎn)速ωg*和電磁基準(zhǔn)轉(zhuǎn)矩Te*。
根據(jù)其運(yùn)行曲線(xiàn),利用當(dāng)前風(fēng)速可以計(jì)算出VSWT的最大功率PV,VSWT的傳輸功率值PC取決于WPP和所需的有功功率。因此,P*=min(PV,PC)。
(8)

(9)
常規(guī)變槳距控制中槳距角的基準(zhǔn)由風(fēng)力發(fā)電機(jī)轉(zhuǎn)速ωr與轉(zhuǎn)速上限ωlim之間的偏差給出。相比之下,本文提出了一種改進(jìn)的變槳距控制,利用頻率控制元件來(lái)控制WPP所生成的功率以及初次頻率控制功率。本文使用特定的模型計(jì)算槳距角的基準(zhǔn)值βref。滿(mǎn)足配電網(wǎng)綜合要求的變槳距控制系統(tǒng),如圖4所示。

圖4 改進(jìn)的變槳距控制系統(tǒng)
發(fā)電量受到電力系統(tǒng)的限制時(shí),WPP會(huì)同時(shí)使用減載和頻率控制。當(dāng)風(fēng)力發(fā)電機(jī)的傳動(dòng)系統(tǒng)被一階質(zhì)量模型代替時(shí),風(fēng)力發(fā)電機(jī)的模型如圖5所示。
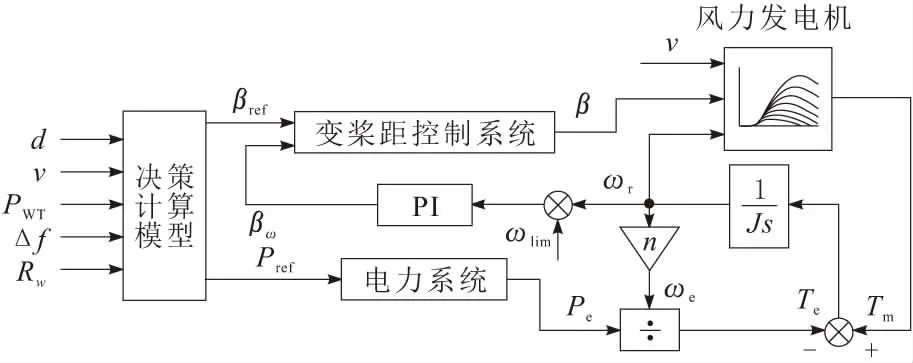
圖5 發(fā)電量受限的VSWT有功功率控制系統(tǒng)
風(fēng)力發(fā)電機(jī)的決策模型受到不同參數(shù)的影響,例如,WPP控制層的初始減載系數(shù)d、風(fēng)力發(fā)電機(jī)的基準(zhǔn)功率PWT、風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù)RW以及頻率偏差Δf。此外,通過(guò)計(jì)算槳距角βref和電磁功率Pref的相應(yīng)基準(zhǔn)值,風(fēng)力發(fā)電機(jī)應(yīng)滿(mǎn)足電力系統(tǒng)施加的初次頻率控制約束條件。
2 電力系統(tǒng)約束下的WPP頻率控制
2.1 風(fēng)力發(fā)電機(jī)的減載控制
對(duì)于單臺(tái)風(fēng)力發(fā)電機(jī),如果減載系數(shù)設(shè)置為0≤d≤1,則可以確定以下基準(zhǔn)值:
Pde=(1-d)Pout=0.5ρπR2Cp-dev3
(10)
Pout=0.5ρπR2Cp-maxv3
(11)
Pde和Pout分別為減載運(yùn)行基準(zhǔn)功率和MPPT中的基準(zhǔn)功率;Cp-de為減載運(yùn)行中的風(fēng)能利用率;Cp-max為最大風(fēng)能利用率。
當(dāng)風(fēng)速v和空氣密度ρ為恒定時(shí),由式(10)和式(11)可計(jì)算出減載運(yùn)行中的風(fēng)能利用率
Cp-de=(1-d)Cp-max
(12)
式(12)表明,風(fēng)能利用率隨著減載系數(shù)d的增大而降低。當(dāng)風(fēng)速v0恒定時(shí),風(fēng)能利用率根據(jù)槳距角從β0到β1而發(fā)生變化,如圖6所示。
通過(guò)將轉(zhuǎn)速?gòu)膬?yōu)化轉(zhuǎn)速ω0提高到ω1可以實(shí)現(xiàn)風(fēng)力發(fā)電機(jī)的減載控制。因此,超速控制和減速控制均可以實(shí)現(xiàn)WPP的減載運(yùn)行。其中,超速控制可以將轉(zhuǎn)子的動(dòng)能儲(chǔ)存為旋轉(zhuǎn)儲(chǔ)備。因此,超速控制更便于實(shí)現(xiàn)減載控制。
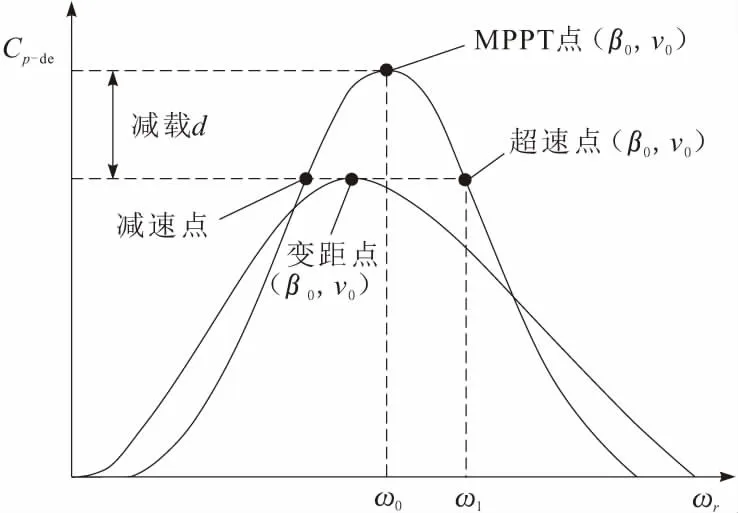
圖6 風(fēng)力發(fā)電機(jī)減載控制原理
考慮到風(fēng)速的不確定性,WPP中的風(fēng)力發(fā)電機(jī)可能以不同的速度運(yùn)行。變風(fēng)速下風(fēng)力發(fā)電機(jī)減載功率曲線(xiàn),如圖7所示。

圖7 變風(fēng)速下風(fēng)力發(fā)電機(jī)減載功率曲線(xiàn)
根據(jù)WPP中風(fēng)力發(fā)電機(jī)運(yùn)行時(shí)的不同風(fēng)速,本文將其分為3種類(lèi)型,即A型、B型和C型。因此,A型、B型和C型風(fēng)力發(fā)電機(jī)分別以AB,BC和CD的風(fēng)速間隔完成運(yùn)行。此分類(lèi)可充分利用超速控制中的速度可用范圍,使用不同的減載控制策略進(jìn)行變槳距控制。本文通過(guò)對(duì)A型風(fēng)力發(fā)電機(jī)采用超速控制進(jìn)行減載運(yùn)行,對(duì)B型風(fēng)力發(fā)電機(jī)采用超速控制和變槳距控制來(lái)進(jìn)行綜合減載控制,對(duì)C型風(fēng)力發(fā)電機(jī)采用變槳距控制來(lái)進(jìn)行減載運(yùn)行。在A型中,風(fēng)力發(fā)電機(jī)以介于vin和vd之間的低風(fēng)速運(yùn)轉(zhuǎn),vd表示風(fēng)速的上限,在該上限時(shí),發(fā)電機(jī)可以使用超速控制來(lái)實(shí)現(xiàn)以減載系數(shù)d的減載運(yùn)行。因此,可以通過(guò)減載運(yùn)行確定風(fēng)能利用率與其最大值之間的關(guān)系為
Cp-de(λd,0)=(1-d)Cp-max(λopt,0)
(13)
λd為減載運(yùn)行下的葉尖速比。因此,為了確定調(diào)整范圍,可以基于Cp-λ-β曲線(xiàn),通過(guò)查找表計(jì)算葉尖速比λd。此外,減載運(yùn)行下的葉尖速比為
(14)
利用式(2)和式(10),減載運(yùn)行下的基準(zhǔn)功率計(jì)算為
(15)
利用式(8)和式(10),減載運(yùn)行下的基準(zhǔn)功率可以計(jì)算為
(16)
因此,可以從式(16)中獲得減載運(yùn)行下的基準(zhǔn)功率。在B型中,風(fēng)力發(fā)電機(jī)在vd和vn之間的中風(fēng)速下運(yùn)行,僅依賴(lài)超速控制不滿(mǎn)足減載運(yùn)行所需的d。實(shí)際上,當(dāng)采用超速控制使轉(zhuǎn)速達(dá)到其上限時(shí),需要進(jìn)行變槳距控制來(lái)完成減載運(yùn)行。在這種情況下,基準(zhǔn)功率的計(jì)算方法與A型相同,其用于穩(wěn)定運(yùn)行的基準(zhǔn)值為:β=βref,ωref=ωmax和λref=ωmaxR/v,其中βref為減載運(yùn)行的基準(zhǔn)槳距角。系數(shù)Cp-max(λref,βref)可計(jì)算為
Cp-max(λref,βref)=(1-d)Cp-max(λopt,0)
(17)
在C型中,風(fēng)力發(fā)電機(jī)在vn和vout之間的高風(fēng)速下運(yùn)行。在此范圍內(nèi),只能使用變槳距控制來(lái)實(shí)現(xiàn)減載運(yùn)行,并且穩(wěn)定運(yùn)行的基準(zhǔn)值為:β=βref,ωref=ωmax,λref=ωmaxR/v和Pref=(1-d)Prated。本文還引入了自然減載系數(shù)kd,其表示當(dāng)風(fēng)力發(fā)電機(jī)工作在額定風(fēng)速以上時(shí),額定功率Prated與最大捕獲功率Pavail之間的比率。假設(shè)Cp-rated和βrated分別為風(fēng)力發(fā)電機(jī)在額定功率下運(yùn)行時(shí)的風(fēng)能利用率和基準(zhǔn)槳距角,則高風(fēng)速下的風(fēng)能利用率為
Cp-de(λref,βref)=(1-d)kdCp-max(λopt,0)
(18)
2.2 WPP上的功率分配
當(dāng)配電網(wǎng)對(duì)WPP施加約束以保證功率和頻率調(diào)節(jié)儲(chǔ)備時(shí),WPP必須以減載系數(shù)d進(jìn)行初始減載運(yùn)行。因此,在不同風(fēng)速下運(yùn)行的風(fēng)力發(fā)電機(jī)以減載系數(shù)d進(jìn)行減載。當(dāng)使用不同的減載系數(shù)時(shí),避免了對(duì)風(fēng)力發(fā)電機(jī)進(jìn)行額外的調(diào)度控制[11]。當(dāng)WPP在初始減載運(yùn)行下穩(wěn)定后,則切換到約束運(yùn)行。在配電網(wǎng)的約束指令下,調(diào)整后的有功功率可以滿(mǎn)足所需的負(fù)荷限制,可以表示為
PT=Pref-(1-d)Popt
(19)
PT為需調(diào)整的WPP的有功功率;Pref為配電網(wǎng)施加給WPP的約束功率。
第i臺(tái)風(fēng)力發(fā)電機(jī)的基準(zhǔn)功率為
PWT-i=ΔPi+(1-d)Popt-i
(20)
ΔPi為第i臺(tái)風(fēng)力發(fā)電機(jī)的有功功率,需要根據(jù)約束條件進(jìn)行調(diào)整;Popt-i為MPPT下的基準(zhǔn)功率。在圖7中,風(fēng)力發(fā)電機(jī)在不同風(fēng)速下的減載運(yùn)行會(huì)產(chǎn)生備用功率的變化。本文的目標(biāo)是在負(fù)荷限制下盡可能少運(yùn)行風(fēng)力發(fā)電機(jī),并通過(guò)在低風(fēng)速下運(yùn)行的發(fā)電機(jī)增加頻率調(diào)節(jié)儲(chǔ)備,從而有助于初次頻率控制。因此,考慮到C型風(fēng)力發(fā)電機(jī)比其他類(lèi)型的風(fēng)力發(fā)電機(jī)保有更多的有功功率,本文將優(yōu)先考慮其執(zhí)行任何預(yù)定的負(fù)荷限制,其次是B型風(fēng)力發(fā)電機(jī),最后是A型風(fēng)力發(fā)電機(jī)。對(duì)于A型或B型風(fēng)力發(fā)電機(jī),減載運(yùn)行中的功率調(diào)整為
(21)

(22)
根據(jù)式(20)~式(22),可以計(jì)算WPP在配電網(wǎng)施加的約束條件下,每臺(tái)風(fēng)力發(fā)電機(jī)運(yùn)行的基準(zhǔn)功率PWT-i。
2.3 風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù)
為了濾除微小的信號(hào)干擾,傳統(tǒng)的發(fā)電機(jī)具有頻率調(diào)節(jié)死區(qū)。同樣,風(fēng)力發(fā)電機(jī)也具有死區(qū)。本文提出的頻率控制策略旨在確保每臺(tái)風(fēng)力發(fā)電機(jī)都能在不依賴(lài)其運(yùn)行條件的情況下進(jìn)行頻率調(diào)節(jié)。此外,本文的目標(biāo)是在有負(fù)荷約束的情況下充分利用儲(chǔ)備風(fēng)能。文獻(xiàn)[12]指出在任何運(yùn)行條件下,可以將風(fēng)力發(fā)電機(jī)的死區(qū)設(shè)置為0.02 Hz,并且靜態(tài)頻率差系數(shù)的值對(duì)電力系統(tǒng)的初次調(diào)頻有很大的影響。根據(jù)傳統(tǒng)發(fā)電機(jī)的功率衰減曲線(xiàn),本文引入風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù)RW。與固定調(diào)節(jié)系數(shù)相比[13],該頻率差系數(shù)可以為風(fēng)力發(fā)電機(jī)提供更合適的頻率支持。
本文提出了一種WPP以高風(fēng)速運(yùn)行的風(fēng)力發(fā)電機(jī)比例調(diào)整靜態(tài)頻率差系數(shù)方法。利用1條直線(xiàn)來(lái)表示風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù)與在高風(fēng)速下運(yùn)行的風(fēng)力發(fā)電機(jī)之間的比例關(guān)系。基于此關(guān)系,可以確定靜態(tài)頻率差系數(shù),如圖8所示。
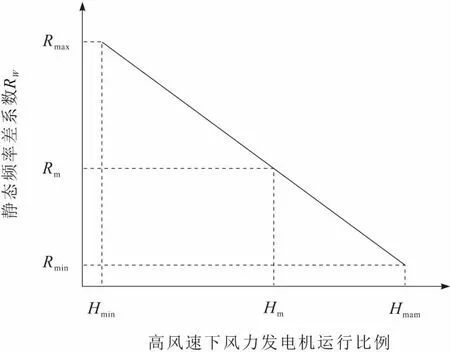
圖8 在高風(fēng)速下運(yùn)行的比例調(diào)節(jié)系數(shù)
該系數(shù)在保持電力系統(tǒng)的頻率穩(wěn)定性方面起著重要作用,這是由于較小的系數(shù)值意味著較強(qiáng)的頻率穩(wěn)定性。然而,在實(shí)際運(yùn)行條件下,非常小的靜態(tài)頻率差系數(shù)將導(dǎo)致電力系統(tǒng)中發(fā)電機(jī)之間的負(fù)荷分配不合理。例如,在汽輪發(fā)電機(jī)中,靜態(tài)頻率差系數(shù)應(yīng)在2%到5%之間。在此范圍內(nèi),頻率響應(yīng)具有合適的性能。因此,本文也將風(fēng)力發(fā)電機(jī)的靜態(tài)頻差系數(shù)設(shè)定在這個(gè)范圍內(nèi),并可以計(jì)算為
(23)
Hm為在高風(fēng)速下風(fēng)力發(fā)電機(jī)運(yùn)行的比例;Rmin=2%;Rmax=5%;Hmin=0%;Hmax=100%。
2.4 風(fēng)力發(fā)電機(jī)的頻率控制
VSWT的有功功率和無(wú)功功率之間的解耦控制可實(shí)現(xiàn)發(fā)電機(jī)轉(zhuǎn)速和配電網(wǎng)頻率之間的相互獨(dú)立性。因此,在正常運(yùn)行條件下,風(fēng)力發(fā)電機(jī)無(wú)法響應(yīng)配電網(wǎng)的初次頻率控制。為了充分利用約束運(yùn)行下的風(fēng)能并提高初次調(diào)頻的頻率特性,還需要增加一個(gè)用于有功功率的頻率控制器。頻率偏差所需的額外有功功率可以表示為
(24)
在有約束的運(yùn)行條件下,當(dāng)頻率發(fā)生變化時(shí),風(fēng)力發(fā)電機(jī)有功功率的基準(zhǔn)值對(duì)應(yīng)于WPP的功率Pf和基準(zhǔn)功率PWT之和。因此,風(fēng)力發(fā)電機(jī)的實(shí)際減載系數(shù)d′可以計(jì)算為
(25)
對(duì)于WPP的頻率控制,可以從式(25)中求出系數(shù)d′,并且可以通過(guò)在相應(yīng)的方程中用d′代替d來(lái)確定用于變槳距控制和頻率控制中的電氣系統(tǒng)基準(zhǔn)值,從而滿(mǎn)足配電網(wǎng)頻率控制的要求。
3 仿真分析
3.1 模擬電力系統(tǒng)
為了驗(yàn)證所提出的WPP中初次頻率控制策略的有效性和準(zhǔn)確性,本文使用MATLAB Simulink軟件進(jìn)行了仿真,并利用文獻(xiàn)[14]中WPP和火電廠的混合電力系統(tǒng)進(jìn)行模擬。模擬初次調(diào)頻的電力系統(tǒng)模型如圖9所示。
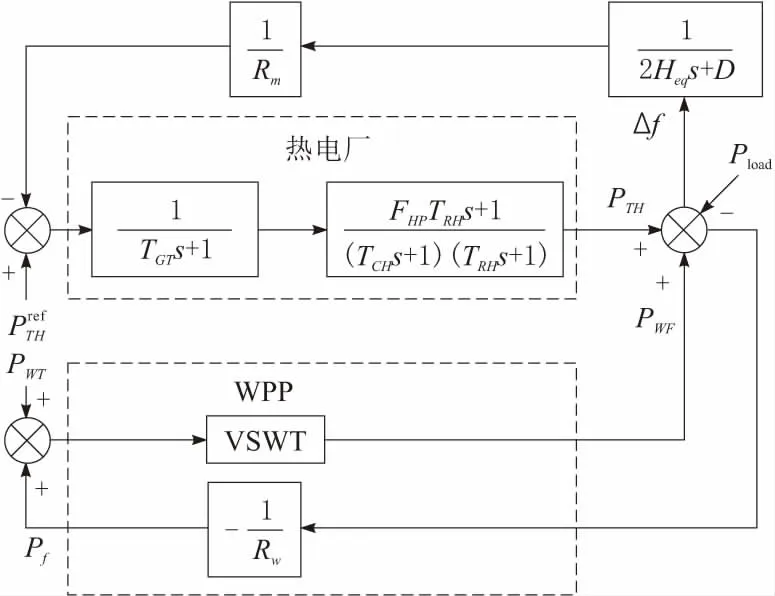
圖9 模擬初次調(diào)頻的電力系統(tǒng)模型
該模型包括1個(gè)600 MW的火電廠,1個(gè)150 MW的WPP,該WPP由100臺(tái)風(fēng)力發(fā)電機(jī)組成,每臺(tái)發(fā)電機(jī)的功率為1.5 MW,負(fù)荷為650 MW。電力系統(tǒng)的其他參數(shù)為:Rm=0.05,TGT=0.02 s,F(xiàn)HP=0.3,TRH=7 s,TCH=0.3 s,H=5 s和D=1。
為了表示在不同風(fēng)速下運(yùn)行的風(fēng)力發(fā)電機(jī),本文選擇了3種不同的風(fēng)速對(duì)應(yīng)于上述風(fēng)力發(fā)電機(jī)的類(lèi)型:A型風(fēng)力發(fā)電機(jī)為8.5 m/s;B型風(fēng)力發(fā)電機(jī)為11 m/s,C型風(fēng)力發(fā)電機(jī)為14 m/s。由于B型風(fēng)力發(fā)電機(jī)同時(shí)采用了A型和C型風(fēng)力機(jī)的控制策略,因此,在仿真中可將其省略。同時(shí),本文假定配電網(wǎng)的初始負(fù)荷與仿真中的發(fā)電功率相對(duì)應(yīng),電力系統(tǒng)的初始頻率設(shè)置為f=50 Hz,WPP的初始減載系數(shù)d=0.2,并網(wǎng)到電力系統(tǒng)的WPP為90 MW,火電廠的并網(wǎng)功率為560 MW。在時(shí)間f=60 s時(shí),系統(tǒng)負(fù)荷突然增加20 MW。本文評(píng)估了WPP運(yùn)行的2種情況:大多數(shù)風(fēng)力發(fā)電機(jī)在低風(fēng)速下運(yùn)行;大多數(shù)風(fēng)力發(fā)電機(jī)在高風(fēng)速下運(yùn)行,如表1所示。
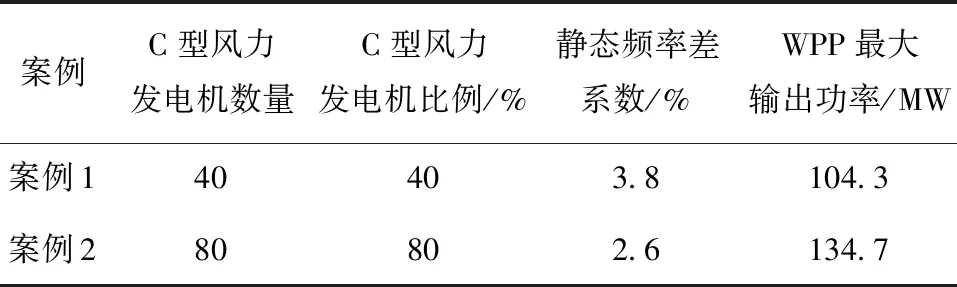
表1 WPP操作案例的參數(shù)
3.2 仿真案例分析
3.2.1 低風(fēng)速下運(yùn)行時(shí)的頻率控制
對(duì)于案例1,本文比較了2種情況,即是否含有所提出有功功率控制和頻率控制的綜合控制策略的WPP頻率情況。相應(yīng)的仿真結(jié)果如圖10所示。

圖10 在低風(fēng)速下運(yùn)行時(shí)的參數(shù)響應(yīng)
圖10表明,當(dāng)頻率發(fā)生變化時(shí),只要WPP參與頻率控制,當(dāng)系統(tǒng)頻率下降時(shí),WPP和火電廠的輸出功率都增加。所提出的控制策略可執(zhí)行多種減載運(yùn)行。例如,頻率儲(chǔ)備用于各種運(yùn)行條件,并且當(dāng)頻率突然變化時(shí),A型風(fēng)力發(fā)電機(jī)通過(guò)降低發(fā)電機(jī)轉(zhuǎn)速釋放其儲(chǔ)存在轉(zhuǎn)子中的旋轉(zhuǎn)動(dòng)能。該釋放可以快速為電力系統(tǒng)提供有功功率。同樣,C型風(fēng)力發(fā)電機(jī)通過(guò)減小基于頻率變化的槳距角來(lái)獲取更多的風(fēng)能,從而提升電力系統(tǒng)的頻率。當(dāng)負(fù)荷在60 s之后發(fā)生變化時(shí),電力系統(tǒng)的頻率響應(yīng)趨于穩(wěn)定。然而,由于初次頻率控制偏離了約束條件,此后頻率不會(huì)恢復(fù)到50 Hz。這種情況可以通過(guò)使用二次頻率控制來(lái)補(bǔ)償。
圖10中,由于電力系統(tǒng)中WPP有功功率并網(wǎng)調(diào)節(jié)頻率,火電廠的輸出功率響應(yīng)還表現(xiàn)出瞬態(tài)下降過(guò)程(約在62~68 s之間)。這種現(xiàn)象是由于風(fēng)力發(fā)電機(jī)對(duì)負(fù)荷增加的快速功率響應(yīng)引起的,在風(fēng)力發(fā)電機(jī)輸出功率降低后,火電廠的功率將恢復(fù)到穩(wěn)定水平。與無(wú)控制策略的WPP情況相比,WPP可以迅速減少頻率下降并為電力系統(tǒng)提供頻率支持。此外,這可以減少火力發(fā)電廠對(duì)頻率控制的壓力。
3.2.2 高風(fēng)速下運(yùn)行時(shí)的頻率控制
與案例1類(lèi)似,在案例2中,本文比較了是否含有所提出的有功功率控制和頻率控制的綜合控制策略的WPP頻率情況。相應(yīng)的仿真結(jié)果如圖11所示。
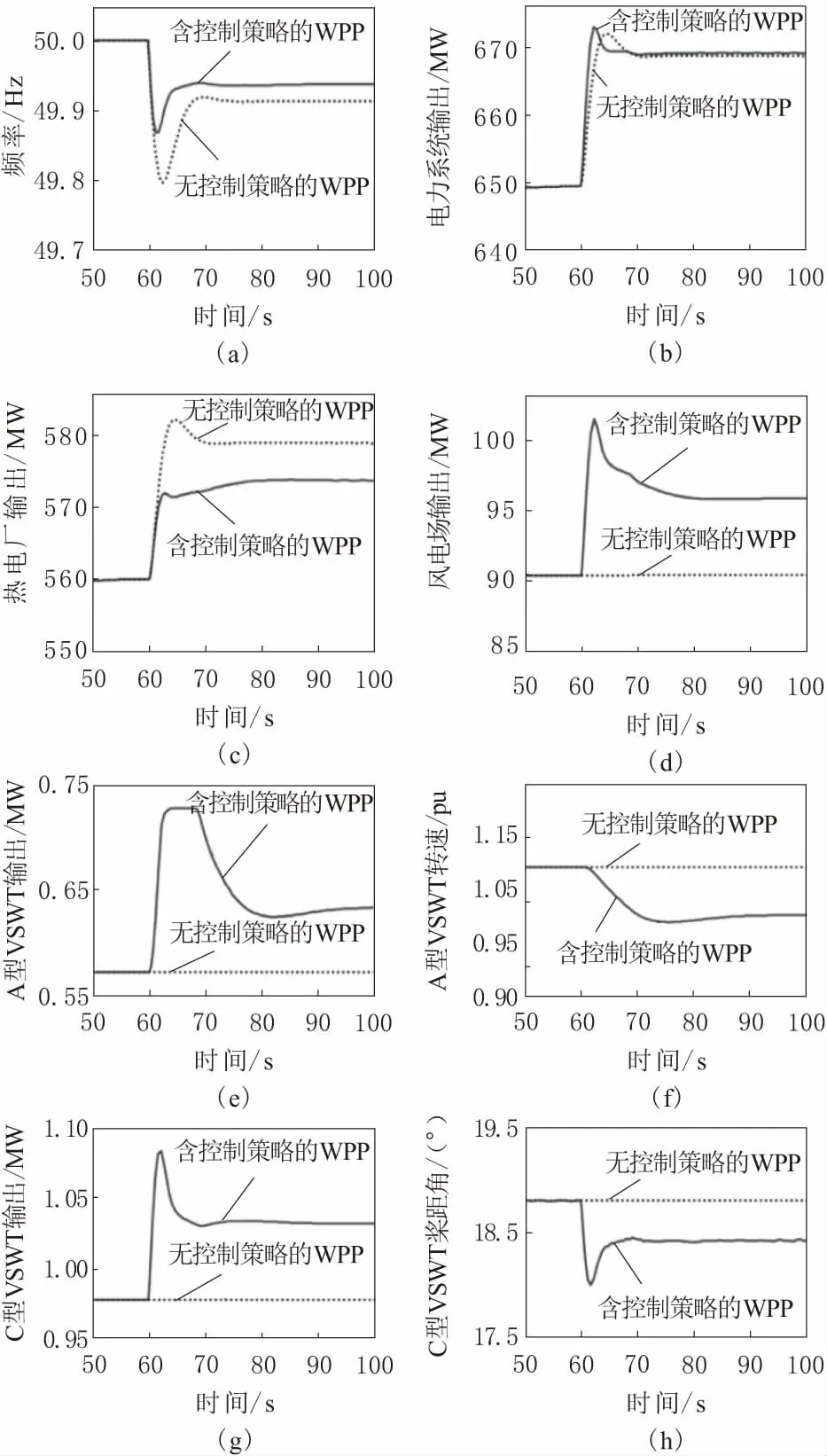
圖11 在高風(fēng)速下運(yùn)行時(shí)的參數(shù)響應(yīng)
圖11表明,當(dāng)頻率發(fā)生變化時(shí),A型和C型風(fēng)力發(fā)電機(jī)分別降低其轉(zhuǎn)速和槳距角,從而為電力系統(tǒng)提供頻率支持。在靜態(tài)頻率差系數(shù)減小的情況下,C型風(fēng)力發(fā)電機(jī)的輸出功率增大。因此,火力發(fā)電廠的輸出功率并沒(méi)有出現(xiàn)明顯的下降,而會(huì)平穩(wěn)地上升到穩(wěn)定值。
4 結(jié)束語(yǔ)
提出了一種用于WPP有功功率控制和頻率控制的綜合控制策略。該策略利用WPP的有功功率減載控制并調(diào)整風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù),推導(dǎo)了風(fēng)力發(fā)電機(jī)在不同風(fēng)速下的減載控制策略,所提出的控制策略可以將減少的風(fēng)能在配電網(wǎng)施加的約束條件下轉(zhuǎn)移到可用的頻率調(diào)節(jié)儲(chǔ)備中,并充分考慮了風(fēng)力發(fā)電機(jī)在超速控制和變槳距控制中的運(yùn)行特性。在低風(fēng)速時(shí),風(fēng)力發(fā)電機(jī)僅使用超速控制來(lái)執(zhí)行功率減載運(yùn)行,而不會(huì)改變槳距角。功率分配策略?xún)?yōu)先考慮以高風(fēng)速運(yùn)行的風(fēng)力發(fā)電機(jī)參與負(fù)荷限制和初次頻率控制。因此,風(fēng)力發(fā)電機(jī)可以充分利用自身的頻率調(diào)節(jié)能力來(lái)滿(mǎn)足配電網(wǎng)的約束要求。所提出的策略可以確保在低風(fēng)速下運(yùn)行的風(fēng)力發(fā)電機(jī)的頻率控制儲(chǔ)備,以此用于隨后的頻率調(diào)節(jié)。由于配電網(wǎng)施加了功率約束,WPP可以使用所提出的控制方法根據(jù)其自身的運(yùn)行條件來(lái)調(diào)整風(fēng)力發(fā)電機(jī)的靜態(tài)頻率差系數(shù)。該控制策略可以改善頻率控制并降低電力系統(tǒng)中火電廠的頻率控制壓力。
猜你喜歡
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31