基于反步法的下三角非線性系統自適應控制律設計框架
2020-06-03 17:12:07張馳宇蔣曉龍馬向春
科技創新與應用 2020年16期
張馳宇 蔣曉龍 馬向春
摘? 要:針對一類下三角非線性系統,基于backstepping方法提出一個自適應控制律的設計框架,且在控制律設計過程中結合Lyapunov穩定性理論進行穩定性分析,保證閉環系統的穩定性。以飛行彈頭的控制器設計為例,進行自適應律設計,并通過數值仿真驗證所提框架的有效性。
關鍵詞:反步法;下三角非線性系統;自適應控制
中圖分類號:TP13? ? ? ? ? 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)16-0025-03
Abstract: Aiming at the class of lower-triangular nonlinear systems, a design framework of adaptive control law based on backstepping is proposed. The stability of the closed loop is ensured by using Lyapunov Stability Theory during the design process. Taking the controller design of flying warheads as an example, the proposed design framework is verified by simulation.
Keywords: backstepping; lower-triangular nonlinear system; adaptive control
1概述
在實際的應用中,被控制的對象(如汽車、船舶和飛行器等)幾乎均具有一定程度的不確定性,如控制模型的不明確、外部干擾的存在等。若使用常規的反饋控制器,不僅無法保證良好的控制品質,甚至可能會造成系統失穩。而自適應方法在處理不確定性問題時具有明顯優勢,因此自適應控制在實際生活中應用非常廣泛。Backstepping方法(反步法)是自適應理論的重要分支之一,從上世紀90年代提出至今[1,2],已發展成為自適應控制的主流,尤其在航天航空領域,因其在飛行器控制上的成功應用,所受關注更多。反步法的基本思想是將高階次的系統分解為若干個不超過系統階次的子系統,然后單獨設計每個子系統的Lyapunov函數,在保證子系統收斂的基礎上,設計該子系統的虛擬控制律。在下一個子系統控制律設計的過程中,將上一個子系統的虛擬控制律作為跟蹤目標,類比于上一個子系統的設計過程,獲得當前子系統的虛擬控制律。以此類推,最終可設計出整個系統的實際控制律,且在設計過程中便結合了Lyapunov理論對穩定性進行分析,保證整個閉環系統的穩定性。本文旨在針對一大類下三角形非線性系統,提出一個通過Backstepping方法設計自適應控制器且同時保證系統穩定性的設計框架,并通過具體實例的數值仿真驗證所提框架的有效性。
本文的結構安排如下,第一節敘述backstepping方法的基本思想;第二節提出基于backstepping方法的自適應控制律設計框架,并進行穩定性分析;第三節是以飛行彈頭系統模型為例,使用所提框架設計自適應控制律并進行數據仿真;第四節對全文做出總結。
2 基于backstepping的自適應控制律設計框架
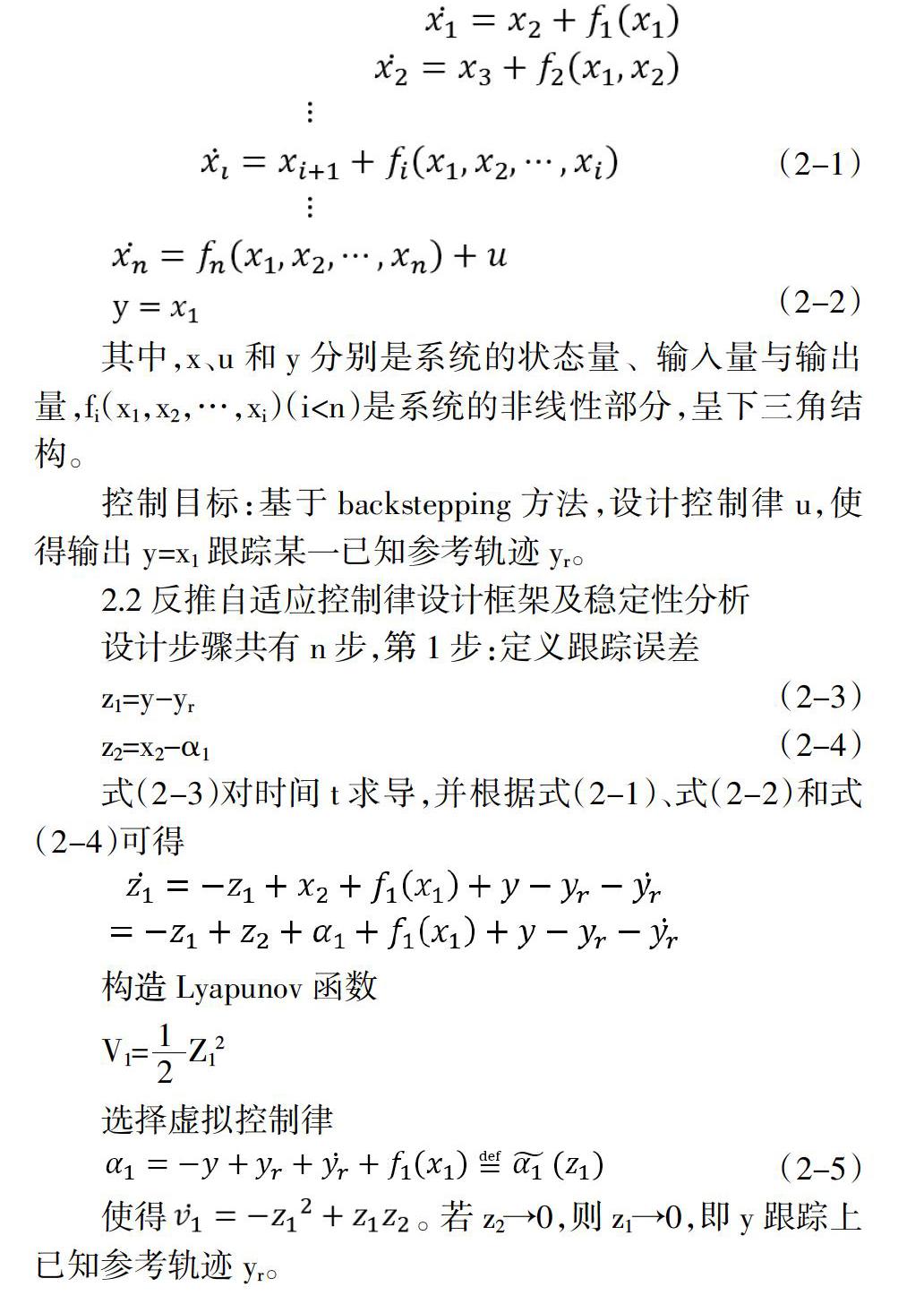
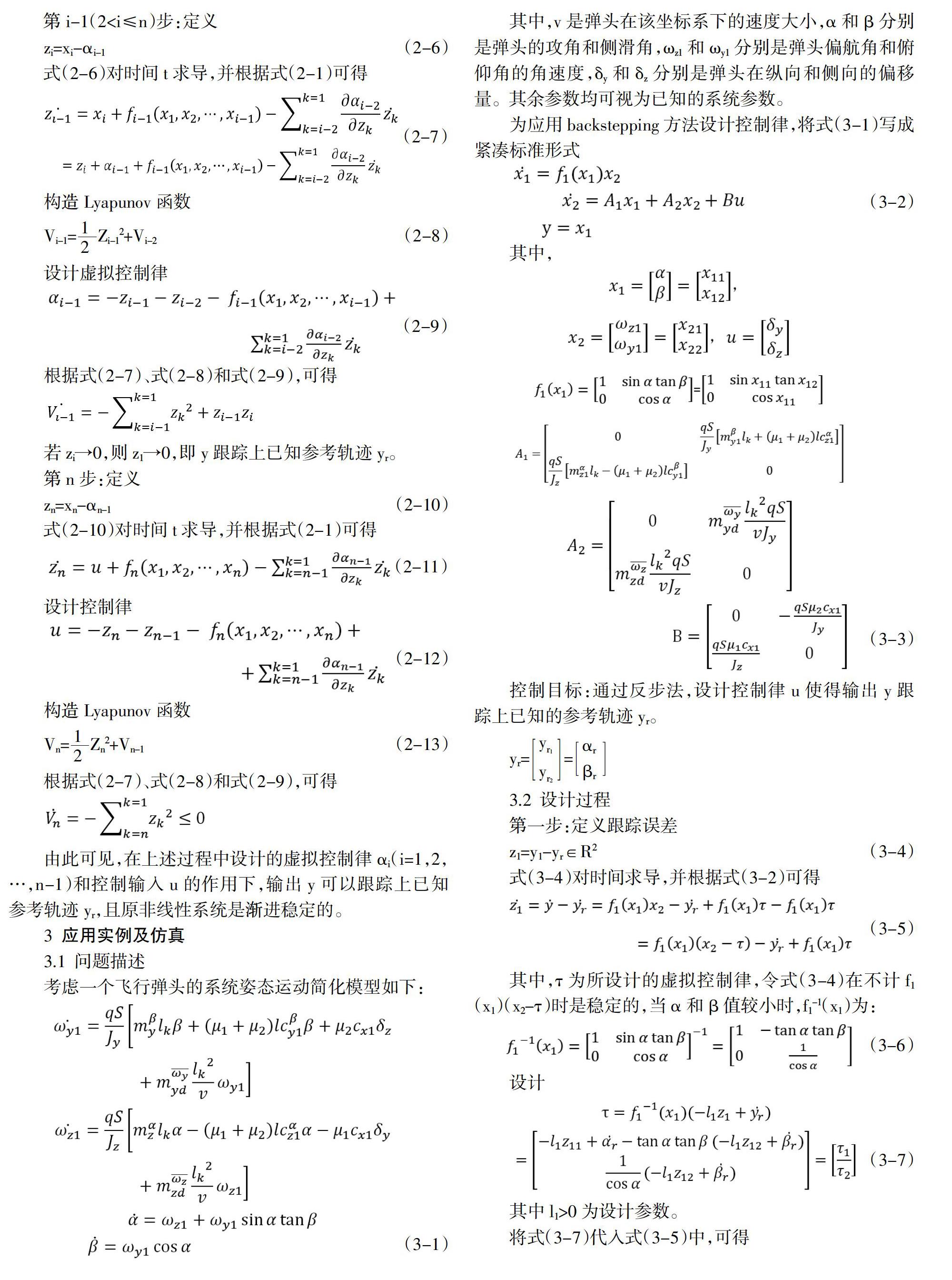
2.1 問題描述
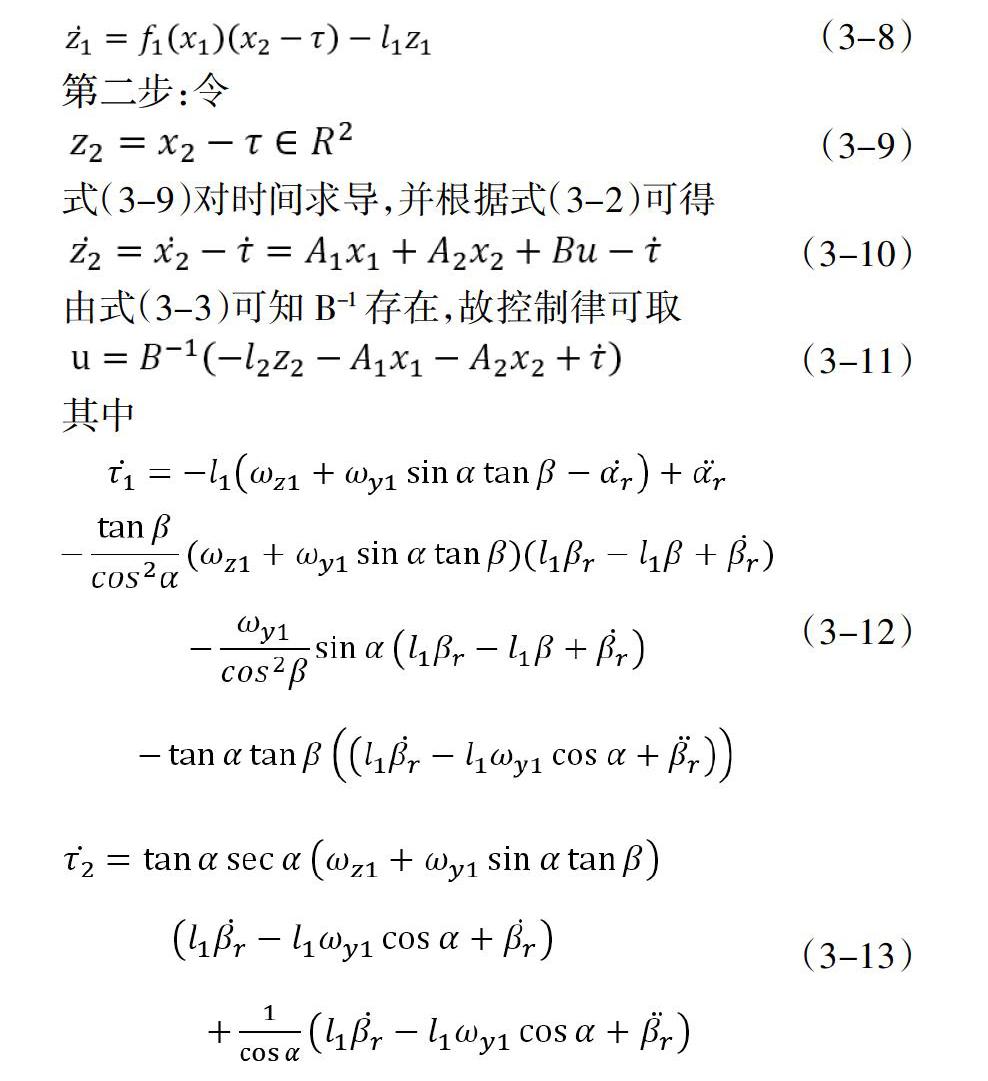
3.3 數值仿真
為驗證所提方案的有效性,本小節進行仿真驗證。系統參數以及仿真初始條件選擇如下:
α=0.05rads,β=0.05rads,wz1=wy1=0,l1=l2=30。
仿真結果見圖1至圖4。由圖1、圖2和圖4可看出輸出y在短時間內即跟蹤上參考軌跡yr,僅由于初始狀態的影響致使在初始時刻存在一定跟蹤誤差z,但很快跟蹤誤差便趨近于零,跟蹤效果良好。由圖3可看出,當參考軌跡為正弦信號時,初始時刻輸出量也并沒有大幅度變化,始終比較平緩,說明控制效果良好。
4 結論
本論文主要針對一類下三角形非線性系統,提出了一個基于backstepping方法設計自適應控制律的設計框架,且在設計過程中結合Lyapunov穩定性理論對系統的穩定性進行分析,保證閉環系統內所有信號均為有界。并以飛行彈頭的簡化系統模型為例,應用該框架設計自適應控制律并進行數值仿真,驗證了所提框架的有效性。
參考文獻:
[1]Saberi A, Kokotovic P V, Sussmann H J. Global stabilization of partially linear composite systems[J].SIAM Journal of Control and Optimization, 1990, 28(8):1491-1503.
[2]Kanellakopoulos I, Kokotovic P V, Morse A S. A toolkit for nonlinear feedback design[J]. Systems& Control Letters, 1992, 18(2):83-92.
[3]林鵬,周鳳岐,周軍.基于變質心控制方式的再入彈頭控制模式研究[J].航天控制,2007(02):18-22.
