基于模糊控制的永磁同步電機滑模觀測器控制
2020-06-04 03:55:46柯希彪袁訓鋒徐曉龍
自動化與儀表 2020年5期
柯希彪,郭 琳,3,袁訓鋒,陳 垚,徐曉龍
(1.商洛學院 電子信息與電氣工程學院,商洛726000;2.商洛市分布式新能源應用技術研究中心,商洛726000;3.西安交通大學 電力設備電氣絕緣國家重點實驗室,西安710049)
永磁同步電機PMSM(permanent magnet synchronous motor)具有結構簡單、體積小、能量密度高等優點,在現代制造業等眾多領域應用十分廣泛[1-2]。永磁同步電機控制中檢測出電機實時轉子位置信息和轉速信息是決定電機控制的成敗和控制性能的關鍵因素。無傳感器控制檢測電機轉子相位和轉速信息價格低、控制系統可靠性較高,因此成了眾多學者研究的重要課題。
1 永磁同步電機滑模控制的應用
滑模觀測器控制SMO(sliding mold observor)具有結構簡單、抗干擾能力強、可靠性高等優點,被廣泛應用于永磁同步電機控制系統中。文獻[3-5]通過構建滑模觀測器模型檢測電機轉速和相位,實現了永磁同步電機無傳感器控制,控制結果良好。文獻[6-7]結合模糊控制理論,設計模糊滑模觀測器控制模型,通過設計模糊控制調節滑模控制參數,實現了永磁同步直線電機無傳感器控制,較傳統滑模控制性能優良。文獻[8-9]研究了滑模觀測器控制產生抖振的原因,設計飽和函數對傳統滑模觀測器進行優化,仿真分析和實驗結果表明改進后的滑模觀測器能夠較準確檢測出電機轉速,并且對滑模控制的抖振有明顯削弱。文獻[10]設計了一種積分滑模控制算法對六相永磁同步電機進行控制,通過仿真驗證了該控制策略具有良好的控制性能。文獻[11]設計了一種模糊自適應反步積分滑模控制策略,試驗證明該控制策略對電機控制具有較強的抗干擾能力。文獻[12]將模型參考自適應控制與模糊控制相結合,該控制策略有效提高了模型參考自適應控制的自適應能力。文獻[13]提出了一種模型參考自適應控制,通過對PI 控制參數進行實時調節,有效提高了模型參考自適應控制性能。文獻[14]設計了一種分段PI 模型參考自適應控制,通過實驗證明該控制策略可以實現電機全速范圍內的無傳感器控制。文獻[15]設計滑模模型參考自適應控制策略,將雙正切函數引入滑模控制中,有效地抑制了滑模控制抖振,準確地檢測出了電機轉子相位信息。
通過對永磁同步電機傳統滑模觀測器控制策略的研究,結合模糊控制的特點,在此設計了一種模糊滑模觀測器控制。模糊控制具有較強的自適應能力,滑模控制具有較強的抗干擾能力。設計積分滑模面,模糊控制實時調節滑模參數,將飽和函數引入滑模控制中進行觀測器設計,可以有效抑制滑模控制抖振,提高觀測器檢測精度。通過建立模糊滑模觀測器控制模型進行驗證,結果表明所設計的控制策略可以較好地實現永磁同步電機控制,控制性能優良。
2 永磁同步電機控制模型
隱級式PMSM 兩相旋轉坐標方程[2-4]為
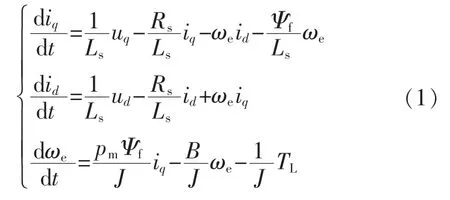
式中:iq,id為電機交、直軸電流分量;uq,ud為電機交、直軸電壓分量;Rs為定子繞組等效電阻;Ls為電樞繞組等效電感;pm為轉子磁極對數;ωe為電角頻率;Ψf為轉子勵磁磁鏈;J 為轉子轉動慣量;B 為轉子黏滯系數;TL為電機負載轉矩。
PMSM 磁鏈方程[2-4]為

式中:Ψq,Ψd分別為電機交、直軸磁鏈。
PMSM 電磁轉矩方程為

永磁同步電機控制是以矢量控制模型進行設計的,矢量控制控制精度較高,結構簡單,是一種無差控制策略,在永磁同步電機控制領域中應用較為廣泛。
3 永磁同步電機滑模觀測器設計
PMSM 在靜止坐標系(α-β 軸)的模型為[2-4]為
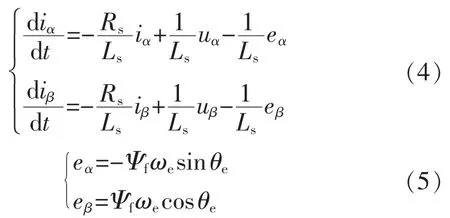
式中:iα,iβ為電機α,β 軸電流分量;uα,uβ為電機α,β 軸電壓分量;eα,eβ為α,β 軸反電動勢;θe為電機轉子相位。
滑模觀測器模型設計為
式中:“^” 代表各狀態量估算值;Hα,Hβ分別為對應分量的控制律。
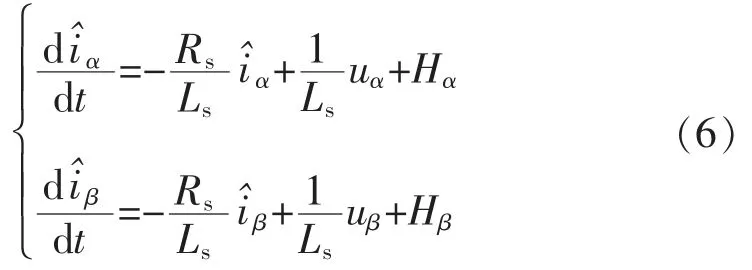
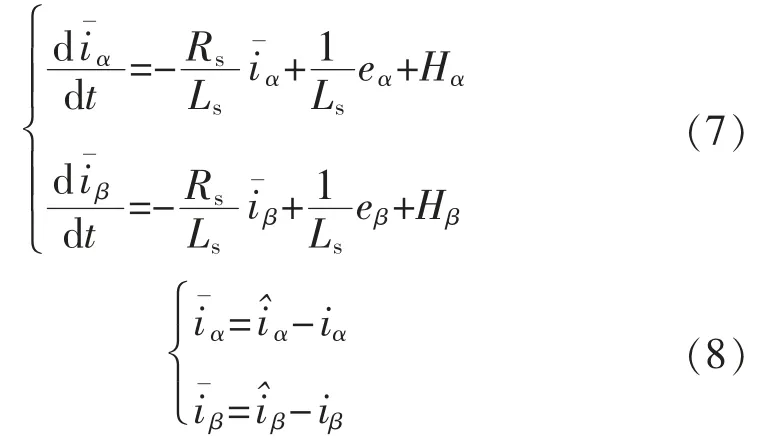
式(6)式(4)求差可得滑模觀測器狀態方程為
設計觀測器積分滑模面,即

其中,c1>0,c2>0。
滑模觀測器采用指數趨近律,即

其中,ε>0,η>0,0<α<1。
滑模觀測器控制律為
其中

系統達到穩定運行狀態時,狀態變量及其變化率均為0,即
PMSM 反電動勢模型為

建立Lyapunov 方程,即

對式(15)求導,可得

故
由此證明所設計積分滑模觀測器滿足Lyapunov穩定性條件,設計的觀測器趨于穩定,可實現永磁同步電機滑模控制。
為減小符號函數引起的系統抖振,構建線性飽和函數設計滑模控制率,飽和函數模型為
式中:a 為正常數,其值決定飽和函數線性區域內滑模增益的斜率和滑模邊界層厚度。當γ 取值滿足式(12)時,滑模觀測器依然滿足Lyapunov 穩定性條件。
滑模觀測器控制律可改寫為
4 模糊滑模觀測器設計
模糊控制是一種利用模糊化概念實現精確控制的智能控制策略,模糊控制的魯棒性和自適應能力較強。在此,將模糊控制理論引入滑模控制中設計模糊滑模觀測器控制策略,以電機控制系統的狀態變量為模糊控制的輸入變量,模糊控制的輸出變量為滑模控制參數,設計模糊控制規則,通過實時調整滑模觀測器參數,有效提高滑模觀測器控制性能。
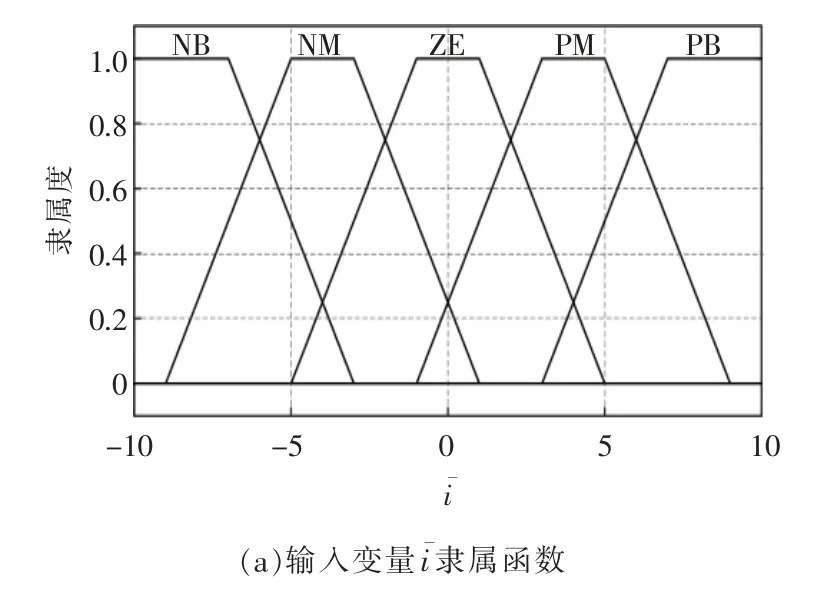
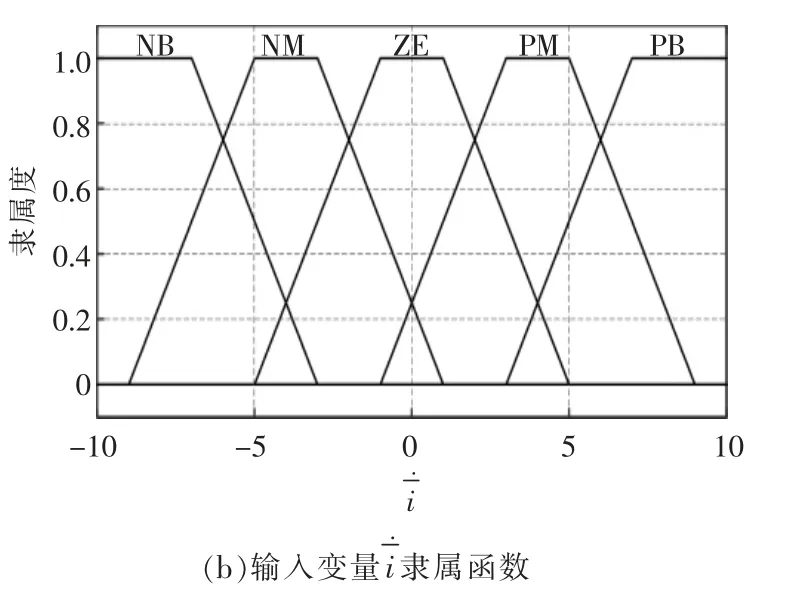
圖1 輸入變量隸屬函數曲線Fig.1 Membership function curve of input variable
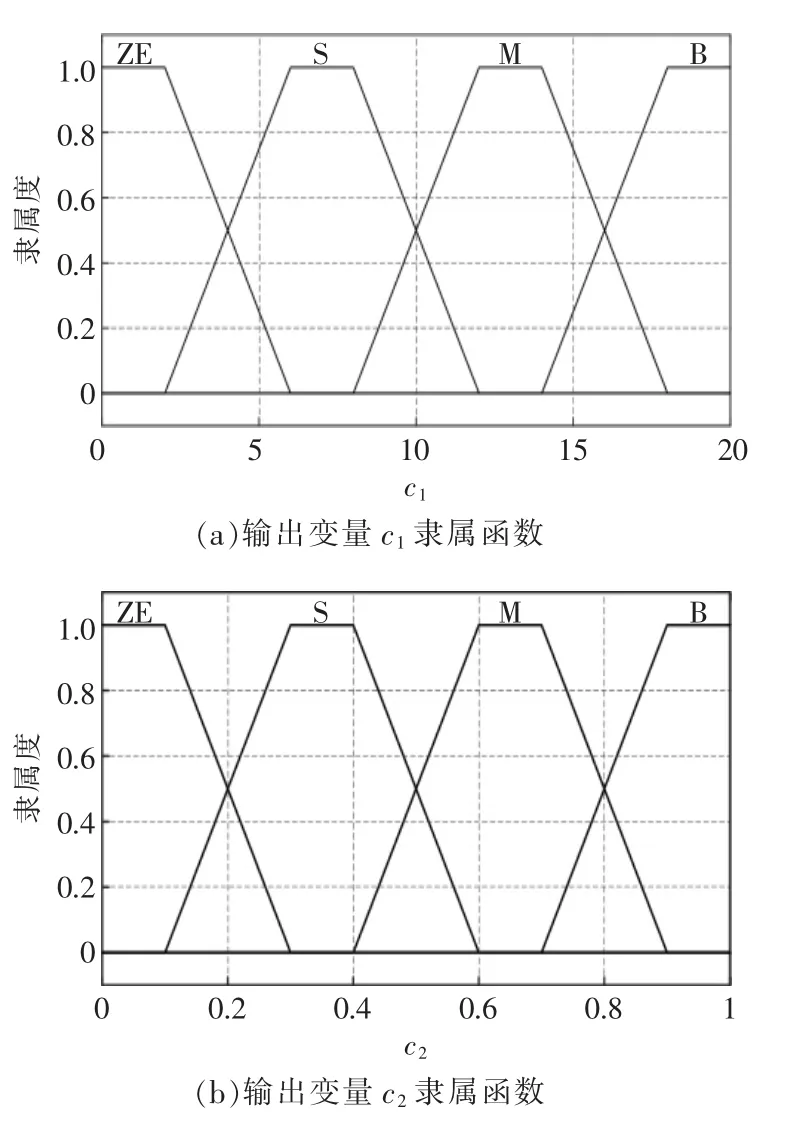
圖2 輸出變量隸屬函數曲線Fig.2 Membership function curve of output variable
表1和表2中,大寫字母分別表示模糊條件:NB為負大,NM 為負中,ZE 為零,PM 為正中,PB 為正大,S 為小。由模糊規則擬合的變量c1和c2所輸出的特性曲面如圖3所示。
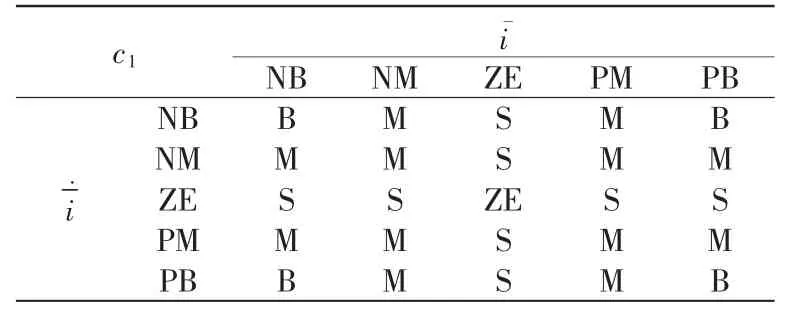
表1 輸出變量c1 的模糊規則Tab.1 Fuzzy rules of output variable c1

表2 輸出變量c2 的模糊規則Tab.2 Fuzzy rules of output variable c2

圖3 模糊控制變量的特性曲面Fig.3 Characteristic surface of fuzzy control variables
永磁同步電機控制模型如圖4所示。
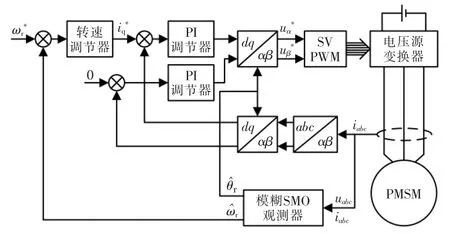
圖4 PMSM 控制模型Fig.4 PMSM control model
5 仿真驗證
搭建永磁同步電機控制模型,將設計的模糊滑模觀測器控制同傳統滑模觀測器控制進行仿真對比,使電機在相同的運行工況下、相同的系統參數下運行,驗證設計的觀測器控制能夠滿足預定控制要求。
永磁同步電機參數見表3,電機調試最高轉速為2000 r/min,取滑模觀測器參數γ=110。
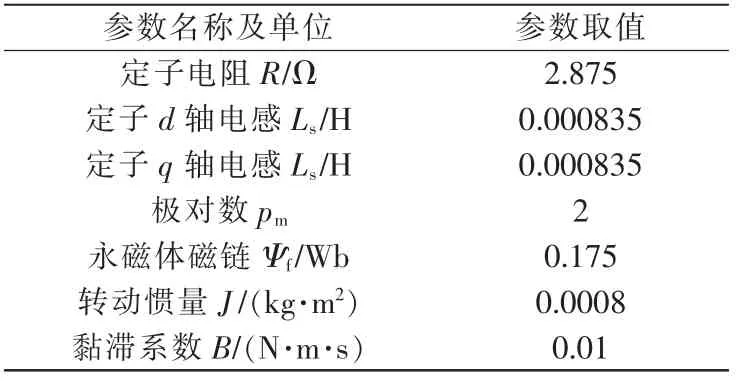
表3 PMSM 參數Tab.3 PMSM parameters
分別搭建傳統滑模觀測器控制和模糊滑模觀測器控制模型進行永磁同步電機控制。電機運行時間均設定為0.2 s,電機的起始轉速設定為n=0 r/min,在t=0 s 時刻電機轉速設定為1000 r/min;當電機運行至t=0.06 s 時刻,電機轉速調節至n=2000 r/min;在t=0.14 s 時刻,為電機突加TL=1 N·m 的負載轉矩。電機仿真波形分別如圖5—圖8所示,其中圖5和圖6為電機轉速波形,圖7和圖8為電機轉子相位波形。
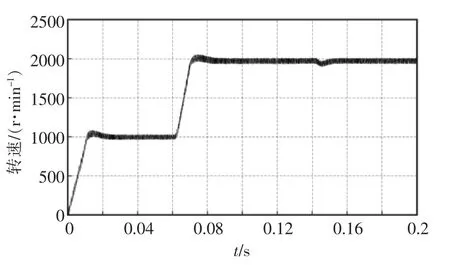
圖5 PMSM SMO 轉速波形Fig.5 PMSM SMO speed waveform
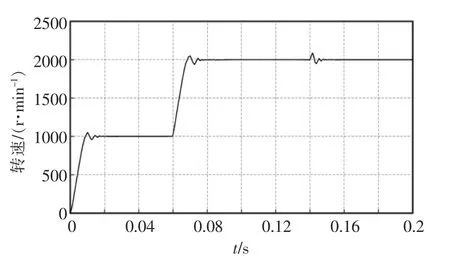
圖6 PMSM 模糊SMO 轉速波形Fig.6 PMSM fuzzy SMO speed waveform
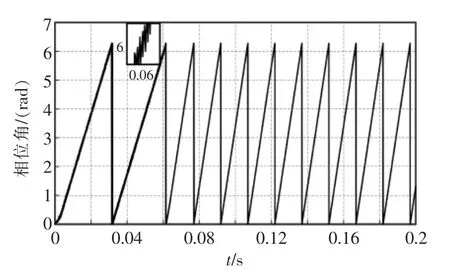
圖7 PMSM SMO 相位波形Fig.7 PMSM SMO phase waveform
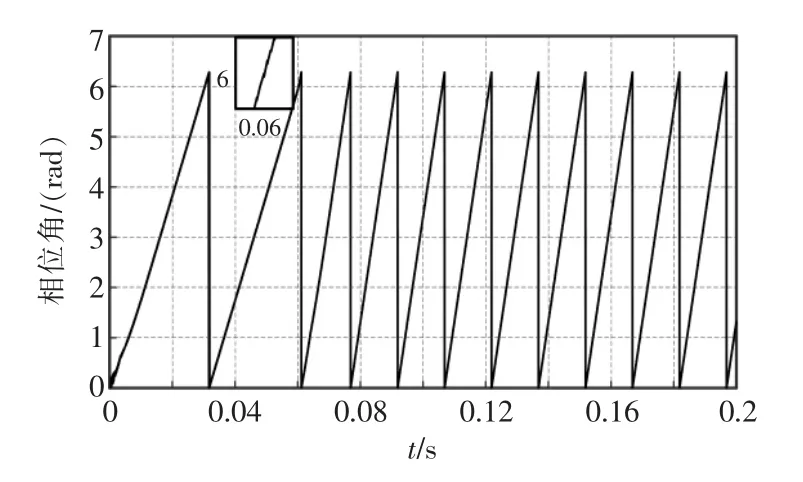
圖8 PMSM 模糊SMO 相位波形Fig.8 PMSM fuzzy SMO phase waveform
通過對比圖5與圖6可見,電機轉速在調節過程中(t=0 s 和t=0.06 s 時刻),轉速均可以快速跟蹤并達到預定轉速,體現了滑模控制的快速響應能力。然而,無論是傳統滑模觀測器控制還是模糊滑模觀測器控制,電機轉速均會出現較大的超調量。
在傳統滑模觀測器控制中,電機轉速超調量持續時間比較長,電機轉速波動比較大。在模糊滑模觀測器控制中,電機轉速超調量在持續振動1~2 個振動周期后,轉速趨于穩定值,且電機在穩定態運行下轉速比較平穩,幾乎不會出現轉速波動的情況(如圖6所示)。當給電機突加負載時(t=0.14 s 時刻),電機轉速會出現一定的抖動,模糊滑模觀測器控制的轉速波形,在轉速波動一兩個振動周期后依然會趨于穩定值,而傳統滑模觀測器控制的轉速會持續的振動,不會達到一個穩定值(如圖5所示)。由此表明,模糊滑模觀測器控制較傳統滑模觀測器控制,具有較強的抗干擾能力和自適應能力。
對照圖7與圖8可見,傳統滑模觀測器檢測電機相位存在較大幅度的振動,電機相位檢測誤差較大;模糊滑模觀測器對電機相位檢測的精度較高,檢測的電機相位抖振比較小(t=0.06 s 時刻),為電機控制交直軸電流解耦提供可靠的保障,使電機控制更精確,系統穩定性更高。通過仿真證明,模糊滑模觀測器控制在永磁同步電機控制中,表現出了更好的控制性能。
6 結語
通過對永磁同步電機滑模觀測器控制研究,結合模糊控制,設計了模糊滑模觀測器控制策略。該積分滑模控制具有抗干擾能力強,控制穩定性高的優點,模糊控制具有較強的魯棒性和自適應能力。將模糊控制與積分滑模控制相結合,可以提高滑模觀測器的檢測電機轉子信息的精度,降低滑模控制的抖振,同時使得控制系統的抗干擾能力和自適應性均有所提高。通過仿真對比驗證了提出的模糊滑模觀測器控制是有效的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
