礦用無線鉆孔應力傳感器設計
2020-06-04 03:55:58趙慶川
自動化與儀表 2020年5期
趙慶川
(1.中煤科工集團重慶研究院有限公司,重慶400039;2.瓦斯災害監控與應急技術國家重點實驗室,重慶400039)
巷道掘進和工作面回采等煤礦開采活動,破壞了圍巖原始應力的平衡狀態[1-2],引起巖體內部的應力重新分布,當重新分布的應力超過煤巖體的極限強度時,采掘空間周圍巖體發生破壞,進而誘發沖擊地壓、煤與瓦斯突出等煤巖動力災害[3]。因此,煤巖體應力狀態的監測與研究對揭示巷道圍巖應力場的分布特征及演化規律和研究煤巖動力災害和巷道支護設計至關重要,對煤礦安全生產具有十分重要的意義[4]。鉆孔應力計是一種應用廣泛的鉆孔應力監測儀器,用于煤礦圍巖體內部的應力監測。但是目前普遍采用單點安裝的機械式應力儀表和有線傳輸的應力儀表用于圍巖內部應力監測[5-6]。然而機械式儀表無法實時在線監測,有線傳輸的鉆孔應力傳感器通信電纜很容易被破壞,導致現場采集的應力數據無法可靠、實時地上傳,為煤礦頂板安全留下隱患[7]。無線傳感器網絡具有擴展簡便、放置靈活、自組網的特點,將無線通訊技術應用于圍巖應力監測可以解決上述問題。因此,本文設計了一種采用SmartMesh IP 網絡通訊技術和壓電電阻檢測原理的礦用無線鉆孔應力傳感器[8],具有施工快速簡便、無線自組網傳輸、檢測精度高等特點,實現了巷道圍巖內部的應力高精度實時監測和超限報警。
1 系統總體設計
礦用無線鉆孔應力傳感器原理圖如圖1所示,原理圖由多個功能電路單元組成,主要包括電壓檢測及轉換單元、數碼管顯示單元、人機交互單元、應力信號處理單元、報警單元、無線組網單元。通過整體的電路優化設計及傳感器低功耗休眠工作機制,完全可以保證傳感器在電池不更換的情況下工作1年以上,以減小設備的現場維護工作量。
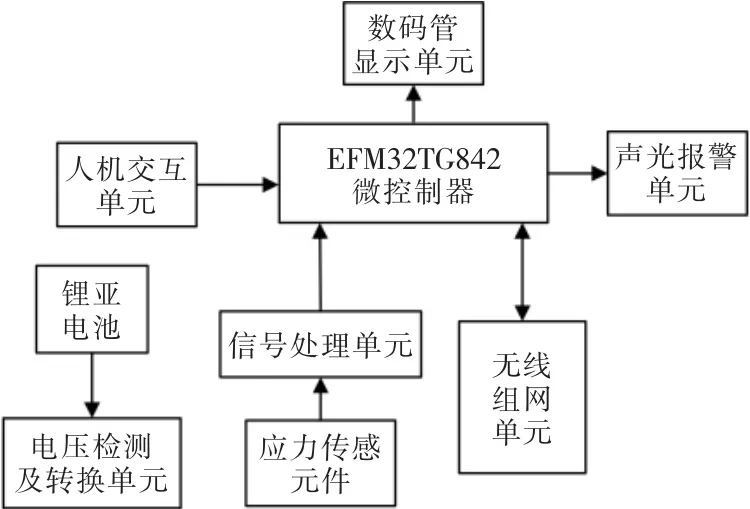
圖1 傳感器電路原理框圖Fig.1 Schematic diagram of sensor circuit
本文設計的礦用無線鉆孔應力傳感器的智能處理核心芯片是挪威的Energy Micro 公司研發的32 位Cortex-M3 內核的超低功耗微控制器,型號為EFM32TG842F32,該芯片擁有5 種低功耗模式,為傳感器程序實現低功耗機制提供了靈活的設計方案。芯片運行模式下最大工作電流為150 μA/MHz,非常適合本傳感器低功耗設計的需要。芯片內置12-bit 高達1 Mbps 的模數轉換器,且有7 路AD 輸入通道,完全滿足電池電壓、圍巖應力信號等多路模擬信號A/D 轉換的需要。芯片具有深度休眠模式,通過32 kHz 低頻外設喚醒。芯片具有三路UART 通信模塊,用于芯片與外設通訊。芯片通過I2C 總線將傳感器調校、報警點、通訊地址等信息存儲至外部數據E2PROM 芯片。
2 硬件電路低功耗設計
2.1 電壓檢測及轉換電路
電壓檢測及轉換單元包括輸入電壓檢測和元件供電電路兩部分。輸入電壓檢測電路如圖2所示,R10、R11兩個電阻實現電池輸出電壓分壓,以保證輸入到微控制器A/D 采集引腳的Battery 電位電壓不會超過A/D 轉換器參考源的電壓值。Q4、R7、R8組成電池電壓通斷開關電路,當Battery-Control 為低電平時,Q4導通,3.6 V 的電池電壓經R10和R11分壓,經R12限流后進入微控制器A/D 采集引腳,經運算得出電池的電壓,根據電量模型預估剩余電量。
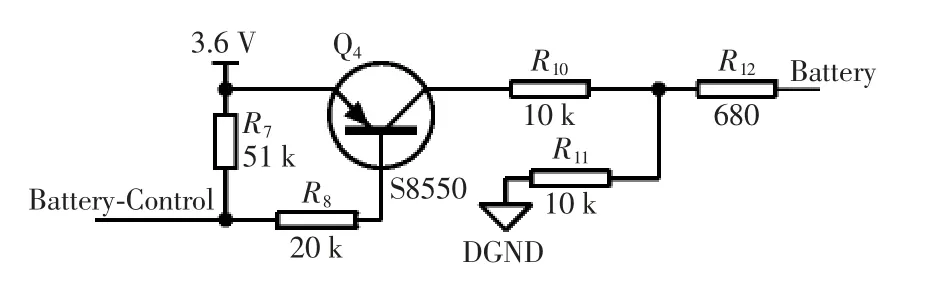
圖2 電池電壓采集電路圖Fig.2 Circuit diagram of battery voltage acquisition
鋰亞硫酰氯電池的電壓額定電壓為3.6 V,礦用傳感器電路需限流、限壓等本安處理,處理后其輸出電壓一般為3.52 V,本傳感器選用的微控制器型號為EFM32TG842F32,其工作電壓為1.85 V~3.8 V,因此可以直接采用電池供電,不需要進行電壓轉換。檢測鉆孔應力的電橋電路的工作電壓為3.0 V,為了降低差壓信號處理電路的噪聲以及控制元件電路供電通斷以降低功耗,將采用LDO 芯片控制的方法進行電壓轉換。元件供電電路如圖3所示。
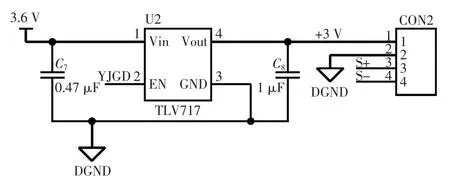
圖3 元件供電電路圖Fig.3 Power supply circuit diagram of component
TLV71730PDQNR 芯片將電壓降為3 V,為鉆孔應力元件及信號處理電路提供電源。芯片具有輸出使能引腳,當微控制器控制輸出引腳YJGD 輸出高電平時,TLV71730PDQNR 芯片輸出3 V,應力元件及信號處理電路上電工作,應力元件即能測量受力大小; 當微控制器控制輸出引腳YJGD 輸出低電平時,TLV71730PDQNR 芯片無輸出電壓,應力元件及信號處理電路處于低功耗休眠狀態。控制引腳YJGD 的高電平與低電平的脈沖時間寬度,從而控制應力元件電路的工作時間,達到即有效檢測元件受力大小,又能最大限度降低功耗的效果,這是實現傳感器整機低功耗的關鍵措施之一。
元件供電電路的電流大小基本取決于應力元件的電流消耗,TLV71730PDQNR 芯片的漏電流只有5 μA,因此在分析錨桿傳感器功耗的時候基本可以忽略芯片的自身電流消耗。
2.2 人機交互電路設計
人機交互電路主要包括光控喚醒電路和遙控信號處理電路。光控喚醒電路是整機低功耗設計的重要方法之一,光照信號是傳感器從休眠模式切換到運行模式的外部中斷信號源,而遙控接收電路是接受用戶設置信息的輸入接口。遙控接收器件選用CHQ0038G,正常工作時平均電流為3 mA,因此必須對遙控接受器件進行上電控制,實現在休眠模式下器件斷電,這也是降低功耗、保證電池工作時間的重要措施之一。電路如圖4所示,微控制器休眠狀態時,KZ1為高電平,Q1截止,CHQ0038G 及三極管Q3電路斷電不工作;當微控制器接收到光照射信號喚醒后,KZ1為低電平,Q1導通,CHQ0038G 及三極管Q3電路上電工作,工作電流為2.7 mA,接受用戶對傳感器的非接觸遙控命令。
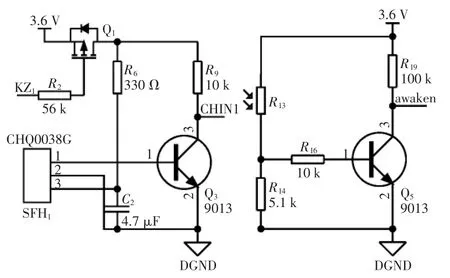
圖4 光控及遙控接收電路圖Fig.4 Circuit diagram of optical control and remote control receiving
R13為感應光照信息的光敏電阻,當無光照時,R13為高阻抗狀態,通過電流小于1 μA,所以R14兩端的電壓遠小于0.7 V,三極管Q5處于截止狀態,Q5集電極和發射極處于高阻抗狀態,awaken 輸入到微控制器的外部邊沿中斷引腳,此時電壓為高電平;當光照射到R13時,隨著光照的增強,流過R13的電流逐漸增大到幾百微安,R14兩端的電壓大于0.7 V,Q5飽和導通,awaken 電壓由高電平變為低電平,微控制器獲取到高低電平變化的邊沿中斷信號,退出休眠模式,進入運行模式,采集應力元件的電壓信號并計算,同時數碼管全亮顯示當前測量數據。
通過以上人機交互電路的運行邏輯分析可知,當工作人員需就地觀察監測數據時,即可采用礦燈照射傳感器喚醒傳感器工作,在不影響使用監測功能的同時減小傳感器整機功耗。
2.3 元件信號處理電路設計
傳感器采用壓電電阻原理應力元件作為受力敏感檢測元件,其阻值為5 k,因此工作電流為0.6 mA,并且采用TI 公司的OPA2333 運放芯片作為差分放大電路的核心芯片,將應力元件0~25 MPa量程壓力信號轉換為0~120 mV 的電壓信號,輸入到微控制器進行A/D 轉換,具體電路如如圖5所示。
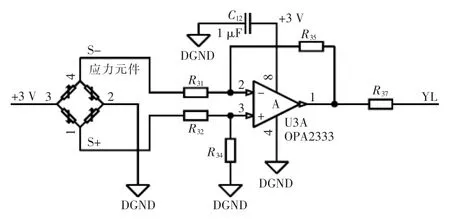
圖5 元件信號處理電路圖Fig.5 Diagram of component signal processing
在圖5中,鉆孔應力元件內部為4 片壓電電阻部件構成的惠更斯電橋,當元件受力后就會在S+和S-間產生毫伏級的微弱電壓差。微弱電壓信號經過R31、R32、R34、R35和OPA2333 芯片構成的差分放大電路后放大為0~2.2 V 的電壓信號,經微控制器A/D轉換及運算,得出應力傳感器真正的受力大小。
2.4 數碼管顯示電路
本文設計的礦用無線鉆孔應力傳感器具有4位LED 數碼管,第一位為功能顯示位,后三位為顯示數值,每位數碼管點亮時工作電流為1.5 mA 左右。
本文采用圖6所示的動態顯示電路,4 個共陽極數碼管由微控制器控制的Q6、Q8、Q9、Q10三極管控制供電,微控制器GPIO 端口經串聯后的限流電阻直接驅動DB0、DB1、DB2、DB3、DB4、DB5、DB6、DB78位控制顯示字符的段位引腳電平。數碼管在休眠狀態下全部熄滅,此時電路漏電流小于5 μA,當用礦燈照射傳感器光電部件時,喚醒微控制器工作,根據光控邏輯控制顯示電路上電工作,顯示當前測量值2 s 后自動進入休眠模式。
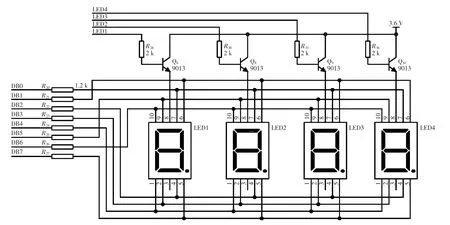
圖6 動態顯示電路圖Fig.6 Diagram of dynamic display circuit
2.5 報警電路設計
本設計采用TMB12A03 有源蜂鳴器作為聲音報警信號源,額定工作電流時聲音可以達到75 dB以上。光報警信號采用的采用并聯高亮紅光二極管,經測試黑暗環境下20 m 外可見。傳感器休眠及監測數值低于報警值時報警電路不工作,漏電流只有10 μA。當鉆孔應力數值超過預設危險報警值時,蜂鳴器和發光二極管進行聲光報警,工作電流約為25 mA。常態下傳感器報警電路不工作,因此這部分電流消耗在電池工作時間計算時可以不納入計算。
2.6 無線組網模塊接口電路設計
本文選用基于SmartMesh IP 技術的組網模塊來組成無線傳輸網絡,相比采用ZigBee 無線技術或者WiFi 無線技術的模塊發射電流和接收電流至少節省20%以上,因此適合在低功耗無線傳感器開發中應用。無線模塊的工作電壓為2 V~3.8 V,設計中采用電池直接供電。微控制器與無線模塊采用電壓正、負及TX、RX 四線制數字通訊接口,規定的通訊速率為115.2 Kbps。微控制器根據制定的私有通信協議與外設模塊交互,將傳感器數據通過無線組網模塊傳輸到上級設備。
3 電池容量計算與選型
鉆孔應力傳感器每分鐘上電工作2 s,因此各部分的平均電流只有正常工作電流的三十分之一。計算可知,信號處理電路部分平均工作電流Ia為0.1 mA;人機交互電路及微控制器電路部分工作電流為5.7 mA,因此這部分電路的平均工作電流Ib為0.193 mA;無線組網模塊常態下處于休眠狀態,電流約為10 μA,接收狀態時平均電流為10 mA,發射狀態時平均電流為20 mA,傳感器工作間隔時間為1 min,發射及接收狀態持續時間約為0.2 s,可知組網模塊平均工作電流Ic為0.1 mA;考慮到各部分電路漏電流及日常使用礦燈喚醒導致的電流消耗,假設這部分平均電流Id為0.05 mA,那么整個錨桿應力傳感器的平均工作電流I 為上述4 項平均電流之和,為0.443 mA。
傳感器每天消耗的電量為24I,即10.632 mAh,工作365 天需要的電量為3.88 Ah。經測試驗證,鋰亞硫酰氯電池能釋放自身95%的電量,因此,選用的電池額定容量應不低于4.03 Ah。經測試比對,選用某公司生產的ER18505 型鋰亞硫酰氯原電池,該電池額定容量為4500 mAh,滿足設計要求。
4 軟件設計
礦用無線鉆孔應力傳感器的程序使用Keil u-Vision V5.2 編譯環境,編程語言為C 語言,main 函數程序執行順序首先是進行EFM32TG842F32 微控制器A/D、UART 等功能外設及I/O 口初始化配置,然后讀取外部E2 內參數信息,配置傳感器應力零點值、線性精度系數、報警點、無線網絡地址及傳感器ID 地址、休眠喚醒時間參數等信息。程序主循環主要是周期性進行應力信號的A/D 采樣與計算、報警判斷,以及通過UART 串口發送數據到無線組網模塊。而后進入休眠低功耗模式,等待光照觸發INT喚醒中斷或RTCC 鬧鐘定時中斷。具體軟件流程如圖7所示。
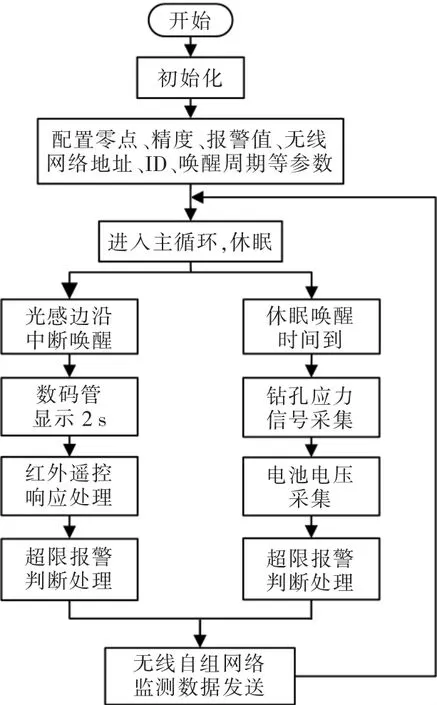
圖7 軟件流程Fig.7 Software flow chart of sensor
5 結語
礦用無線鉆孔應力傳感器設計是頂板安全監測領域的重要需求之一,是評價巷道支護質量和科學性的主要傳感設備,對巷道超前支護具有重要的知道意義。本文根據以上電路設計完成了傳感器樣機的加工,在實驗室條件下測試,10 臺傳感器能實現5 分鐘內組網,通訊具有較強的抗電磁干擾的能力,特別適合巷道環境下鏈狀網絡布置的情況下應用。在某煤礦巷道環境下對10 臺鉆孔應力傳感器測試,無線通訊距離達到50 m,經過1 個月的電池電壓監測,計算分析電池工作時間基本在1年以上,符合傳感器的設計要求。傳感器監測數據準確反映了巷道煤柱壓力變化情況,對安全生產具有科學數據支撐,在煤礦井下具有廣闊的推廣應用的前景。
聲 明
最近社會上有一些機構和個人,冒充《自動化與儀表》編輯部收取文章發表版面費,本刊特在此作如下聲明:《自動化與儀表》雜志的網站為www.zdhyyb.com,投稿郵箱為zdhyyb@vip.sina.com,其他的網站和郵箱地址,均與本編輯部無關,請作者提高警惕,謹防上當!
《自動化與儀表》編輯部
