小型固定翼無人機集群綜述和未來發展
2020-06-08 01:36:46王祥科劉志宏叢一睿李杰陳浩
航空學報 2020年4期
關鍵詞:系統
王祥科,劉志宏,叢一睿,李杰,陳浩
國防科技大學 智能科學學院,長沙 410073
在自然界中,為彌補個體能力的有限,諸多生物種群都能通過個體相互之間交流和合作呈現出某種群體行為,比如魚群的結群游弋、鳥群聚集遷徙以及螞蟻協同搬運等。這些生物界的觀察激勵了研究人員深入探索集群系統群體行為的原理和模式,以期望實現僅通過系統內局部的信息交換,使外部呈現出規則有序的協同行為的工作機制。受此激勵,人們希望開發像鳥群、魚群一樣自由集結可以執行全局任務的無人機集群系統。
近年來,無人機集群因其潛在的巨大應用價值得到快速發展。一般而言,集群借助無人機機間的局部交互實現機群的群體行為從而解決全局性的協同任務。無人機集群,能夠以分布方式完成大量單機系統無法完成,或者由群體更有效完成的任務。相比于旋翼無人機,固定翼無人機具有速度快、載重大、航程長等特點,在執行任務方面具有明顯的優勢。特別地,小型固定翼無人機由于具有體積小、成本低、易使用的優點,是適宜于大規模集群使用的理想平臺[1]。
在此背景下,本文從集群系統內涵、現有典型項目、關鍵技術3個角度出發,對國內外小型固定翼無人機集群進行了全面綜述。其中,在系統內涵方面,在介紹無人機集群系統基本概念的基礎上,分析了無人機集群協同執行任務的優勢,并給出了其在軍民領域的廣泛應用。在典型項目方面,從集群協同模式、指揮體系架構、基礎性研究、集群驗證4個視角總結現有典型項目。在關鍵技術方面,對體系架構、通信組網、決策與規劃、飛機平臺、集群飛行、集群指控等核心要素進行深度分析。此基礎上,展望了未來小型固定翼無人機集群的發展趨勢。具體而言,在給出無人機集群系統的概念和內涵基礎上,本文的主要工作和貢獻包括:
1) 系統總結了無人機集群項目的研究現狀。采用自頂向下的方法,首次從集群協同模式探索、分布式指揮體系構建、核心關鍵技術突破和集群驗證等方面綜述了近年集群領域的代表性工作。
2) 從機載約束、數量規模、任務耦合、復雜動力學等角度深入分析了固定翼無人機集群控制的挑戰。在此基礎上,按照集群協同的技術體系,分別綜述了體系架構、通信與組網、決策與規劃、平臺系統、集群飛行、集群安全、集群指控等核心關鍵技術的研究進展。
3) 針對小型固定翼無人機特點和面臨的復雜環境任務需求,從群體智能牽引、多樣化任務導向、分布在線處理、意外事件響應、低成本輕質化特色和平行仿真手段等角度,系統展望了這一領域未來的發展趨勢。
1 無人機集群系統介紹
1.1 無人機集群系統基本概念
無人機集群是將大量無人機在開放體系架構下綜合集成,以平臺間協同控制為基礎,以提升協同任務能力為目標的分布式系統[1]。一般而言,集群中的無人機不具有全局信息,通過相鄰無人機間的交互,實現機群的群體行為,達到全局性協同目標[2-4]。由于無人機集群行為是個體之間交互的結果,并不依賴于起主控作用的個體,因此集群系統通常具有魯棒性、規模彈性和靈活性[3-4]。
從生物集群,例如蟻群、蜂群等典型群體的特點出發,集群中的個體通常自主能力有限,但是群體通常具有3個典型特點:
1) 去中心化:系統沒有主導節點,一旦集群中任何個體消失或喪失功能,整個群體依然有序地執行任務。
2) 自主化:無人為操控,且所有個體觀察臨近個體狀態控制自身行為,但并不對任何其他個體產生直接控制作用。
3) 自治化:所有個體形成穩定的集群結構,一旦任何個體脫離群體或因任何原因改變群體結構,新集群結構會快速形成并保持穩定。
1.2 無人機集群協同執行任務具有諸多優勢
固定翼無人機集群協同執行任務已經成為無人機系統應用的重要發展趨勢。自20世紀90年代以來,無人機在軍民領域受到了空前的關注并得到了迅速發展。因響應速度快、使用成本低、部署靈活等獨特優勢,無人機被普遍認為是未來信息化發展的重要平臺。但是,由于環境復雜性和任務多樣性,單無人機通常難以滿足很多實際任務需求,比如復雜惡劣的戰場環境,遮蔽物眾多的城市環境等,單無人機由于機載設備數量、感知視點及范圍受限等缺陷,通常難以執行持續目標跟蹤、全方位飽和攻擊等任務。故而,集群協同執行任務逐漸成為趨勢。相比于單個無人機,擁有分布式特征的無人機集群在協同執行任務方面具有諸多優勢。具體而言:
1) 具有分布并行感知、計算和執行能力,更好的容錯性和魯棒性等。集群中的多架無人機可以通過異質傳感器的互補搭配,實現傳感的并行響應;可以通過執行器分別執行子任務,實現總任務的分布執行。當部分無人機出現故障時,其他無人機可以替代它完成預定任務,使集群系統具有較高的容錯性和魯棒性。比如,在使用集群執行察打一體任務時,無人機集群可調整不同無人機攜帶的不同偵察設備(如光電吊艙、合成成徑雷達(SAR))的姿態,對目標進行全方位、多角度偵測,提高感知范圍和精度;可從多視角進行態勢感知,比如重點區域/敏感目標的三維實時重構、隱藏/偽裝目標的深度挖掘和學習分類等,獲取不完全甚至沖突的局部態勢信息;同時也可以對顯著目標的異常行為進行分析和預判,比如敵方人員是否準備發動襲擊、車輛/坦克是否集結進入作戰準備、導彈是否進入發射狀態、作戰飛機是否準備起飛等;可從不同角度對同一高價值目標同時發動全方位飽和攻擊,提高殺傷力和命中率。當由于自身故障或敵方攻擊造成的部分無人機損失時,集群系統可通過敏捷重組,確保對重點目標的觀測或打擊效能不降級。
2) 可提升任務執行能力,完成單機完成不好或者不能完成的任務。協作的無人集群系統能夠實現超過單個智能無人系統疊加的功能和效率,具備良好的包容性和擴展性。在大地測量和氣象觀測等領域,無人機集群攜帶分布載荷可完成單機無法完成的多點測量任務;在環境監測等領域,可組成移動傳感器網絡有效監測大范圍的空氣質量。在軍事領域,無人機集群可以形成點面結合、靈活分組的自主系統,完成單個大型人機無法完成的任務。比如執行協同察打任務的無人機集群,部分無人機可以執行未知區域搜索的任務,部分無人機可以執行重點目標跟蹤的任務,部分無人機可以執行目標打擊任務等;甚至可通過接力方式,實現對穿越山洞等遮蔽環境目標的持續跟蹤。
3) 具有更高的經濟可承受性。通過合理的布局和協同控制,能夠使用分散式的低成本無人機集群系統代替成本高昂的單個復雜系統,實現更多的經濟效益。基于小型化、集成化、模塊化的設計理念,和信息化、自動化、網絡化的管理使用方式,可極大降低無人平臺的生產、運輸、維護、保障、使用成本。1 000架規模的無人機集群系統,其成本將低于1顆偵察衛星或1架有人機,但其綜合效能有望超越1顆偵察衛星或1架有人機。
1.3 無人機集群在軍民領域有廣泛的應用
面對日益復雜的任務環境,小型固定翼無人機集群的運用越發廣泛。由多個無人機組成在任務上相互關聯的集群執行復雜任務的樣式將成為未來軍民用領域中無人機使用的一種重要樣式,目前已在貨物遞送[5]、環境保護[6]、災難響應[7]、農林作業[8]、森林防火[9]、安防巡邏[10]、目標搜索與追蹤[11]等領域得到應用。
在民用領域,無人機集群在智能交通、物流運輸、森林火災監測、地質災害探測、農業植保、國土資源監測、對地觀測和遙感、高速公路管理、小區環境監測等場景中具備特有的優勢。比如,在國土資源監測中,無人機集群以協同模式同時對區域進行監控,可以很大程度上實現區域的同步監控,增加有效覆蓋面積,節約執行任務時間。
軍事領域中,無人機自主集群勢必成為未來作戰的主流趨勢。無人機集群將帶來作戰模式的顛覆性變革,可廣泛應用于廣域搜索偵查監視、邊境巡邏搜救、城市反恐維穩等領域,并可衍生新的作戰模式,提升體系作戰效能。從2001年開始,美軍先后發布了8版無人機/無人系統路線圖,指導無人系統的頂層設計和規劃發展。早在2005年,美軍國防部發布的《無人機系統路線圖2005—2030》將無人機自主控制等級分為1~10級,包括單機自主、多機自主、集群自主(分布式控制、群組戰略目標、全自主集群)3個層面,并預計2025年后將具備全自主集群能力[12]。2016年5月,美國空軍發布了首份針對小型無人機系統(起飛重量低于600千克)的飛行規劃——《2016—2036年小型無人機系統飛行規劃》,從戰略層面肯定了小型無人機系統的前景和價值,并對集群作戰概念進行了闡述[13]。
無人機集群因其典型優勢,有望在未來戰場的協同探測、協同攻擊、干擾壓制等各方面發揮巨大作用,成為一支不可忽視的新質力量。
在協同探測方面,無人機集群在戰場上可以協同執行各種偵察、監視任務,對某一軍事敏感區域實行常態化不間斷監控,以全面獲取戰場環境監測和評估信息;在通信中繼、電子對抗、和欺騙迷惑等方面,無人機集群也具有更高的成功率。特別地,分布式的系統拓撲結構使系統無中心脆弱點,損失部分平臺對集群整體任務能力的影響不大,抗毀性好;同時,損毀補充替換簡便,系統維護成本低。
在協同攻擊方面,無人機集群攻擊可避免飛行員傷亡,并且成本可承受,這是完全不同于以往的一種新的“纏斗”方式。任何飛行器,不管是有人還是無人的,都可能被單個導彈打下來,但是無人機集群卻能夠承受多次打擊,繼續完成任務。無人機集群系統將迫使敵人形成了“大炮打蚊子”的作戰劣勢,即使部分無人機被對方摧毀,也不影響集群系統的整體作戰能力,通過隊形的重組和任務的重新分配,實現核心攻擊任務能力不降級。
在干擾壓制方面,無人機集群在攻防兩端顯著成本不對稱。集群中的無人機通常是典型“低小慢”目標,易于躲避敵方雷達防空系統,但對無人機實施打擊卻通常需要動用精確打擊武器,如果敵方發動飽和式攻擊,將耗盡其防御武器。以美軍“提康德羅加”級巡洋艦為例,該巡洋艦裝備了“宙斯盾”系統,最多可同時監視空中240個目標。如果無人機集群超過250個,同時又是一種“低小慢”的空中目標,將導致其監視能力達到飽和。因此,無人機集群系統可以“引誘式”耗盡對手的高價值攻擊武器,從而增加對手攻擊的相對成本,以規模優勢給對方造成慘重的損失。又如,可以利用無人機集群搜索隱形戰斗機和導彈發射車引誘對方開機,讓可消耗的無人機“自殺式”打前陣,讓寶貴的有人機/有人車殿后,可能有助于在未來戰爭中減少人員和昂貴裝備損失。在過去,數量較少的極度昂貴的有人機是戰場的標準配置,但是在未來的幾年中,大量便宜的、消耗性的無人機將廣泛地出現在戰場上。
2 典型項目研究現狀
近年來,無人機集群成為各國爭先研究的熱點,不斷有集群項目的突破性報道。本節從協同模式探索、分布式指揮體系、核心技術突破和集群驗證等方面總結了近年的代表性工作。
2.1 創新協同理論,探索集群協同的模式
日益增多的無人機系統,勢必引起其使用模式的顛覆性變革。目前,美軍裝備的無人機數量已經多于1萬架,超過了有人機的數量。如此眾多的無人機系統,如何最大效能的發揮作用?對此,集群使用的模式應運而生。正如二戰初期,坦克由分散到集中使用帶來了“閃電戰”革新,小型無人機的集群化應用有可能會像坦克“閃電戰”一樣,形成新的顛覆性軍事能力。
為充分發揮集群數量和低成本優勢,并融于現有體系,以美軍方為代表,人們探索了各種集群協同模式,并設計了大量作戰想定,從頂層指導無人機集群的發展。典型協同模式包括:無人機集群協同、無人機集群和有人機協同、和大型載具協同、以及和其他無人裝備的跨域協同等。
2.1.1 無人機集群協同
無人機集群協同是指采用大量(>10數量級)低成本無人機平臺,以機間通信為基礎,以機間智能協同為核心,形成大規模的同構集群系統。海軍研究生院在2012年發表了《無人機群攻擊:驅逐艦的防護系統選擇》[1],為探討驅逐艦對無人機集群協同攻擊的防護問題,設計了小型固定翼無人機集群協同作戰的想定,見圖1。驅逐艦為“宙斯盾”系統,集成了干擾器、誘餌彈、“標準”系列面對空導彈、127 ms艦炮和2座“密集陣”近防武器系統;無人機集群由8架速度為250 km/h的無人機組成,部分自主飛行,部分受附近漁船遙控。

圖1 美海軍無人機集群攻擊驅逐艦想定[1]
研究團隊對這一作戰模式進行了大量模擬仿真。500次蒙特卡羅仿真結果分析表明:平均約3.82架無人機能夠突破驅逐艦的防御系統;在電子干擾、雷達誘餌、煙霧彈等各類額外防護手段中,最有效的為增加2門近防炮進行攔截,即使如此,平均約2.5架無人機擊中驅逐艦。該結果意味著:可以使用大量廉價的無人機攻擊嚴密防守的艦艇,這些無人機總成本僅與一枚導彈相當,具有極高的效費比。
2.1.2 無人機集群和有人機協同
無人機集群和有人機協同指的是將無人機集群和有人機一起混合編組,共同執行任務。短期內無人機的智能化水平難以達到有人平臺的程度;故而,在相當長的一段時間內,無人平臺和有人平臺將相互補充,分工協作,共同完成復雜的作戰任務,形成顛覆性作戰能力[14]。為此,人們設計了各種無人機集群和有人機協同的作戰想定。其中典型想定為美國通用原子公司提出的“復仇者”(Avenger)無人機集群與 F-22 戰斗機協同對地攻擊概念[15](圖2)。想定中,4架F-22戰斗機和16架“復仇者”組成2個集群。F-22機組位于后端指揮支援,“復仇者”集群協同突防,摧毀敵地空導彈陣地。

圖2 通用原子“復仇者”集群與F-22協同對地攻擊[15]
2.1.3 無人機集群和大型載具協同
為解決無人機集群的快速/遠距可達的問題,可以將無人機集群和各種大型載具協同。采用航母或者空中母機攜帶無人機集群抵達作戰區域,而后快速釋放無人機,形成威懾性作戰能力。比較典型的想定包括X-47B集群和航母的協同想定[16],和國防部預先研究計劃局(Defense Advanced Research Projects Agency, DARPA)的空中航母計劃。
X-47B集群和航母協同想定:美軍構想3艘航母組成打擊集群(CSG),在絕對安全區域起飛30~40架隱身無人機,代替有人機對重點目標分批次打擊,如圖3[16]所示。在6 019 km時,12架隱身無人機形成一個中隊出動,重點打擊沿海區域的防空力量;接著,當CSG行進至距海岸3 241 km時,6架 無人機形成集群前出,降低反介入威脅,增加水面艦艇的安全性;最后,CSG行進至距海岸926 km 時,7架無人作戰飛行系統(UCAS)形成集群防空壓制,CSG開始密集攻擊,此時,水面艦艇和有人駕駛戰斗機加人戰斗。該集群作戰構想為航空母艦提供更強大的防區外攻擊能力,并增強海軍的前沿部署和持續作戰能力。特別需要指出的是,目前雖然X-47B無人機已經轉化為空中加油機項目,但是以無人機集群代替有人機進行第1波 次的攻擊,仍然是《無人系統路線圖》中的主要作戰模式之一。
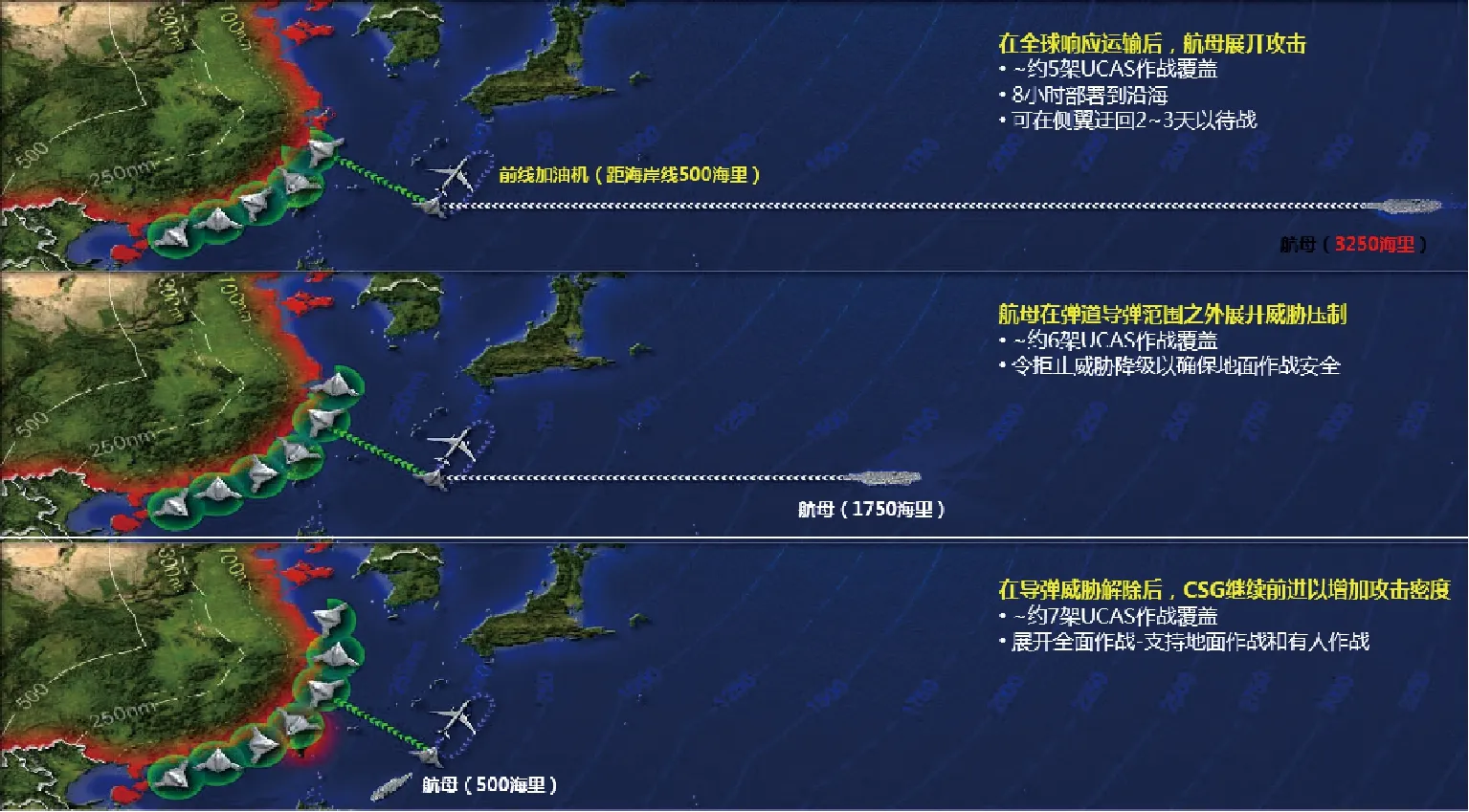
圖3 X-47B集群和航母協同攻擊想定[16]
DARPA的“空中航母”構想,如圖4所示:所謂“空中航母”就是保障無人機空中運載、操作使用和任務控制的大型航空平臺。它能夠在飛行中釋放出無人機,對無人機的作戰運用進行控制,并對完成任務的無人機進行回收、加油、掛彈和維修等保障作業。傳統空中作戰任務大都采用大型有人機完成,但存在犧牲飛行員生命的風險;采用無人機雖然能夠克服這些風險,但飛行高度較低,航程和續航能力也有限。所以用大型有人駕駛飛機攜帶、發射和回收多個小型無人機聯合作戰的方案,將能最好地將兩者各自的特點相結合:既可以同時延長有人駕駛飛機和無人機的作戰航程,又增強了整體的安全性,從而能以有效成本實現突破性的功能,用于執行情報、監視、偵察和作戰各種任務。

圖4 DARPA空中航母想象圖
2.1.4 無人機集群和其他無人裝備跨域協同
無人機集群和其他無人裝備協同指的是將無人機集群和無人車、無人艇或者無人潛航器等無人裝備協同,共同執行任務。不同無人裝備之間的跨域協同,有利于發揮各自的優勢,更有針對性地高效完成任務。代表性的想定為DARPA的“進攻性蜂群使能戰術”(Offensive Swarm-Enabled Tactics, OFFSET)項目(見圖5)[17]。城市作戰中,高聳的建筑物、狹窄的空間以及受限的視野形成的“城市峽谷”,限制了軍事移動和戰術實施。無人機和無人車在城市地區的空中偵察和建筑清剿作戰中具有明顯優勢。為此,DARPA啟動了OFFSET項目,旨在利用大規模空中和地面自主機器人,大幅提升城市作戰能力。項目設想利用250個以上的無人機或無人車的跨域集群,在8個 城市街區自主執行6小時的區域隔絕任務。
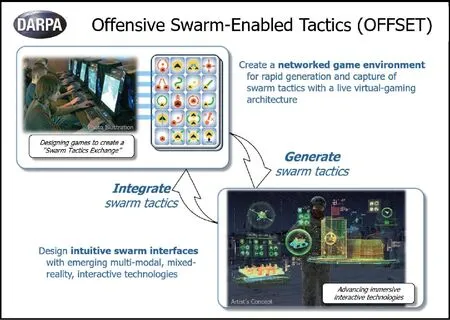
圖5 OFFSET 跨域協同設想[17]
2.2 強調體系協同,構建分布式指揮架構
分布式體系作戰概念已成為指導美軍裝備發展的重要思想。無人機集群系統是典型的分布式作戰力量。為克服高成本、單一龐大的多功能平臺的內在問題,發揮網絡化無人平臺優勢,在DARPA等機構牽引下,美軍持久開展分布式作戰體系研究,力爭構筑新的分布式指揮架構。主要項目包括:拒止環境中協同行動(Collaborative Operations in Denied Environment, CODE)[18],系統的系統集成技術和試驗(System of Systems Integration Technology & Experimentation, SoSITE)[19]和分布式作戰管理(Distributed Battle Management, DBM)[20]等。
1) CODE:旨在開發基礎性的算法和軟件,使得現有無人機能夠以最小代價,在最小監督下協同工作,使得當前多人操作1架無人機的模式到1人同時操作6架或更多的無人機,以提高美軍在拒止或對抗空域中分布式行動能力。項目按照計劃分3階段執行(如圖6)[18]。2018年11月,項目演示了裝備CODE軟件的無人機系統在“反介入區域拒止”環境下適應和響應意外威脅的能力。在真實/虛擬/構造環境下中,6架真實無人機和 24架 虛擬無人機,接收指揮官的任務目標后,自主協同導航、搜索、定位;并在通信和GPS拒止環境中,與模擬綜合防空系統保護下的計劃和突發的目標作戰。CODE的可擴展能力極大增強了現有空中平臺的生存性、靈活性和有效性,并減少無人系統的開發時間和成本。
2) SoSITE:開展分布式航空作戰體系架構研究,發展能夠快速集成任務系統/模塊到體系的技術,并驗證體系在戰場中的有效性和魯棒性。目標是使用簡單的、廉價的無人機等平臺組成集群,在開放性系統架構下,進行多作戰平臺和信息傳輸整合,最終優化作戰形成分布式戰力的方法。例如連接有人和無人機或者空中和地面載具、或者多種基礎設施組件。
項目計劃分2階段進行,如圖7[19]所示。2018年7月,洛·馬公司臭鼬工廠和DARPA開展了系列SoSITE項目飛行試驗,驗證了如何應用SoS方法和手段在對抗環境中對包括空、天、地、海、網絡空間的各個作戰域內的系統進行快速無縫的集成。該項目的成果可將任務系統快速并經濟上可承受地集成到現有架構中,有助美軍在瞬息萬變的作戰環境中維持作戰優勢。
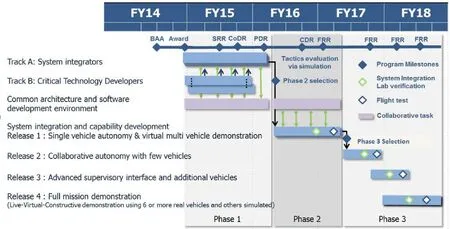
圖6 CODE項目計劃圖[18]
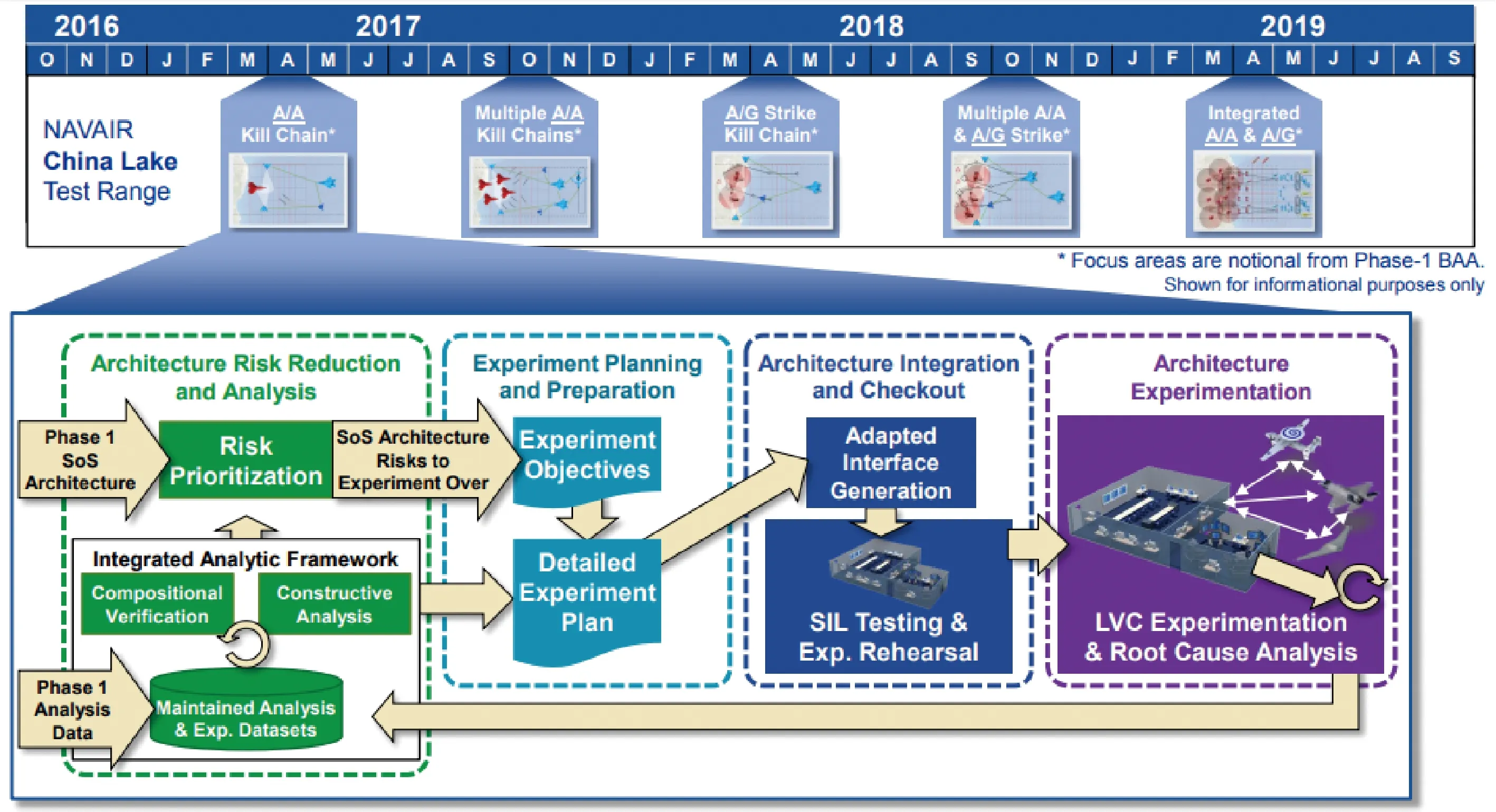
圖7 SoSITE項目計劃圖[19]
3) DBM:SoSITE項目明確提出了發展分布式空戰的概念、架構及技術集成工具,這必然帶來組合爆炸的難題。針對這一挑戰,DBM項目借助開發和驗證分布式決策輔助軟件,提供分布式的規劃、控制以及態勢理解等解決方案,以指導空戰管理和空對地攻擊等任務。在完成第1階段論證和關鍵算法設計后,2017年9月,DARPA和AFRL進行了首輪飛行試驗,驗證了通信中斷后多機系統可繼續執行任務能力;2018年3月,BAE公司贏得了最終階段合同,預計將于2019年8月或9月進行最后的飛行演示驗證。
2.3 加強基礎研究,突破核心關鍵技術
集合人工智能、控制理論、機器人、系統工程和生物學等領域專家,從自然集群的自組織機理著手,突破分布式集群體系架構、集群持久協同、協同感知-判斷-決策-行動(OODA)、群體智能等核心技術,并將其應用到集群系統中。關鍵技術的研發大多由高校和具有強大科研實力的科技公司主導完成,其中決策與控制相關的技術進展參見第3節。這里主要介紹部分有較大影響的牽引性項目。
美國麻省理工學院How教授領導的小組自2006年起開展“無人機集群健康管理”(UAV Swarm Health Management)項目[21]。“大規模分布式飛行器集群,在長時間任務中是有很大潛力以提供性能優勢的。然而,如果沒有一個高度集成的健康管理系統,這些性能優勢是很難發揮出來的”。基于此,項目設計了無人機集群和地面車輛健康狀態的任務規劃算法,例如確定平臺失效對任務的影響、使用真實硬件設備來驗證加油和維護調度的最優策略等。10架四旋翼無人機系統的300余次測試驗證了算法的有效性。
美國賓夕法尼亞大學GRASP(通用機器人自動控制、傳感器和感知)實驗室認為:未來將依賴于小型平臺和傳感器組成的大型網絡在動態、資源有限的敵對環境中執行任務。為此,他們圍繞集群協同:OODA回路展開研究,包括體系架構、分布感知、協同同步定位建圖、編隊飛行等。特別值得提及的是:2012年他們成功讓16~20架小型四旋翼無人機(73 g)在室內組成各種形狀的飛行編隊(圖8)[22],這是研究人員第1次實現了10架以上無人機的集群飛行,取得了轟動性的演示效應。
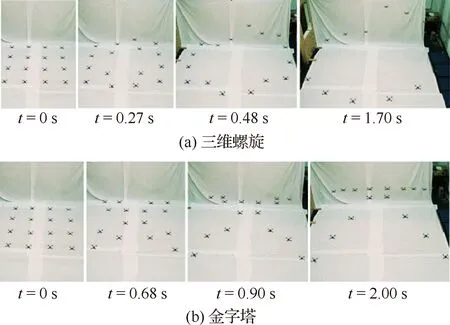
圖8 16架無人機形成三維螺旋和金字塔[22]
在GRASP實驗室旋翼機編隊飛行的激勵下,中美兩國的科技公司在無人機集群數量上不斷突破,使得無人機集群燈光秀逐步成為各大型活動的“標配”。2015年11月,英特爾公司在德國漢堡實現了100架四旋翼的室外燈光秀表演,從此拉開了無人機集群燈光秀的序幕[23];2018年英特爾公司在其成立50周年的慶典上放飛2018架無人機,曾創造了當時一次性使用無人機數量最多的世界紀錄[24]。國內億航[25]、高巨創新[26]等公司,也多次完成無人機集群燈光秀表演。2019年7月,高巨創新公司在建國70周年之際,完成了2 100 架無人機集群的燈光秀表演(如圖9[26]所示)。一般認為,燈光秀表演中的每一架無人機都已預先設定好軌跡,以軌跡跟蹤或集中控制的方式完成[27]。
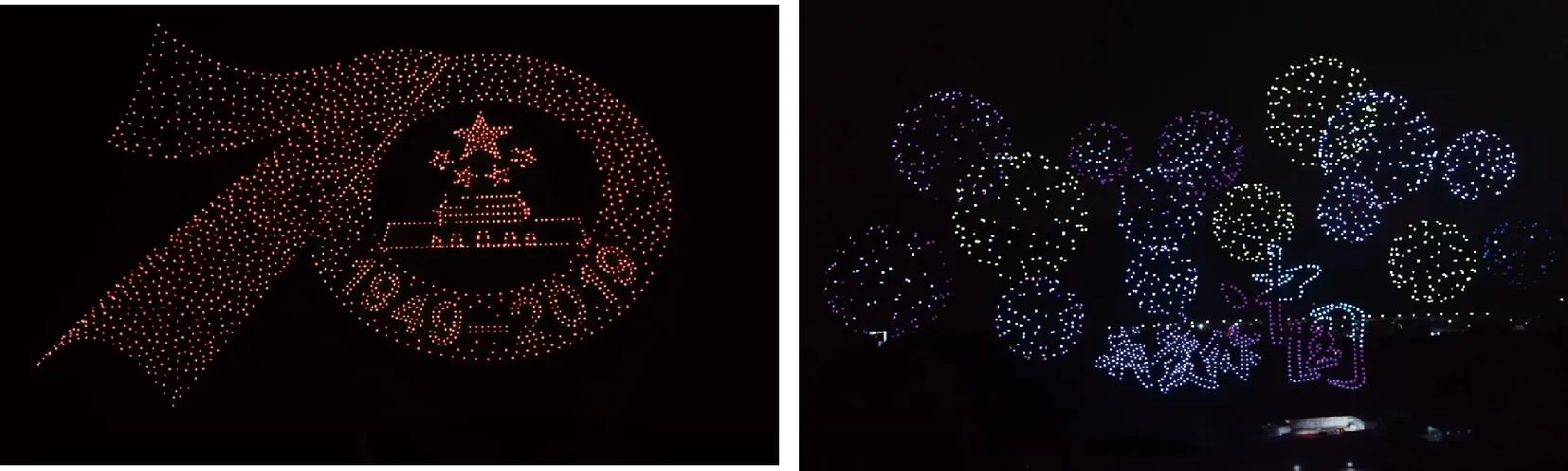
圖9 高巨創新公司慶祝建國70周年的燈光秀表演[26]
集群協同算法的開發和驗證在地面機器人集群上開展的更為深入。考慮到規模因素,地面機器人集群往往嚴格控制單機器人的體積和成本。瑞士洛桑聯邦理工學院開發了用于教學的e-puck機器人,每個機器人的直徑僅有7.5 cm,造價約250歐元[28];在此基礎上,實現了20個e-puck機器人的聚集、覓食等協同行為[29]。德國斯圖加特大學設計了尺寸為30 mm×30 mm×20 mm的Jasmine機器人,并在3 m×3 m的區域內實現了規模達到105個機器人的聚集行為[30]。美國哈佛大學Radhika Nagpal教授團隊設計的Kilobot機器人,直徑為3.3 cm,單個造價僅為14美元,機器人只能通過振動的方式以1cm/s的速度運動[31];基于Kilobot機器人,該團隊設計了覓食、編隊等協同行為,并進行了上千規模(1 024)的集群演示,集群系統在運行12 h之后,能夠自動排成“K”字形、五角星、扳手等圖案[32],如圖10所示。這也是機器人集群的規模首次達到千量級。
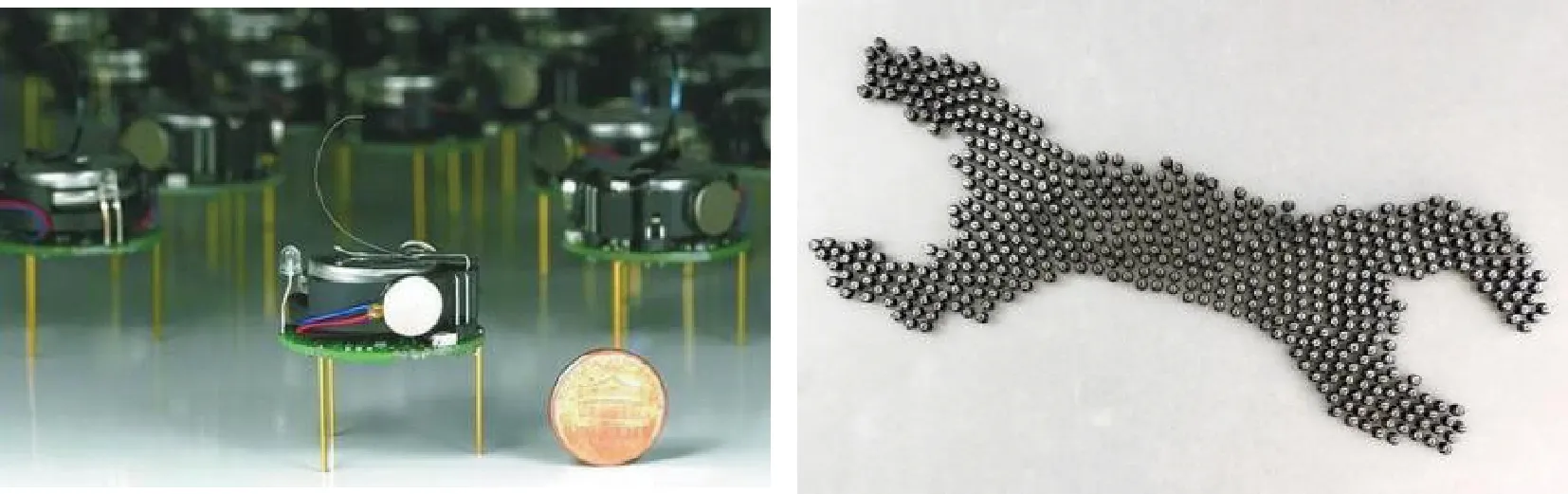
圖10 Kilobot機器人及其形成的扳手圖案[32]
群體智能也被普遍視為集群系統能力提升的關鍵技術,受到了多個領域研究者的普遍關注。群體智能往往被看作是對自然界的生物智能的模擬,通過設計簡單規則使能力較弱的一群個體最終進化生成較復雜的群體行為。大量的代表性成果發表在Nature和Science及其子刊上。除Kilobot機器人外,近年來取得的代表性成果還有:哈佛大學的Werfel等受白蟻啟發,設計了3個機器人,基于簡單規則和局部感知最終可搭建金字塔等形狀[33];比利時布魯塞爾自由大學的兩位研究人員使用e-puck構建的20個機器人集群經過群體演化后,能夠自行學會并掌握先前設計者并為對其指明的動作序列[34]。2019年,中國青年學者李曙光與他的合作者共同完成設計的粒子機器人登上Nature封面,該機器人通過信息交換和力學協同模擬了生物細胞的運動,能夠實現搬運物體和向光源移動[35]。
2.4 加緊集群驗證,形成非對稱優勢
為推動無人機集群形成任務能力,在協同模式和關鍵技術的牽引下,國內外研究機構開展了大量的集群協同飛行試驗驗證,力爭盡快形成非對稱集群優勢。美正在開展的代表性項目包括:低成本無人機集群技術[36]、“山鶉”無人機集群[37]、近戰隱蔽自主一次性無人機[38]、可空中回收無人機集群“小精靈”[39]等。項目基本情況如表1所示。
低成本無人機集群技術(LOw-Cost Unmanned aerial vehicle Swarming Technology,LOCUST)項目由美國海軍研究辦公室(Office of Naval Research, ONR)主導,采用無人機集群協同模式(見圖11)[36]。旨在快速釋放大量小型無人機,通過自適應組網及自主協同,以壓倒性數量優勢贏得戰爭。項目發展了如郊狼(Coyote)等系列小型折疊翼無人機和多管發射裝置。2016年4月,美海軍實現了30架郊狼無人機的快速發射(1架/s)和自主編隊飛行的技術驗證。
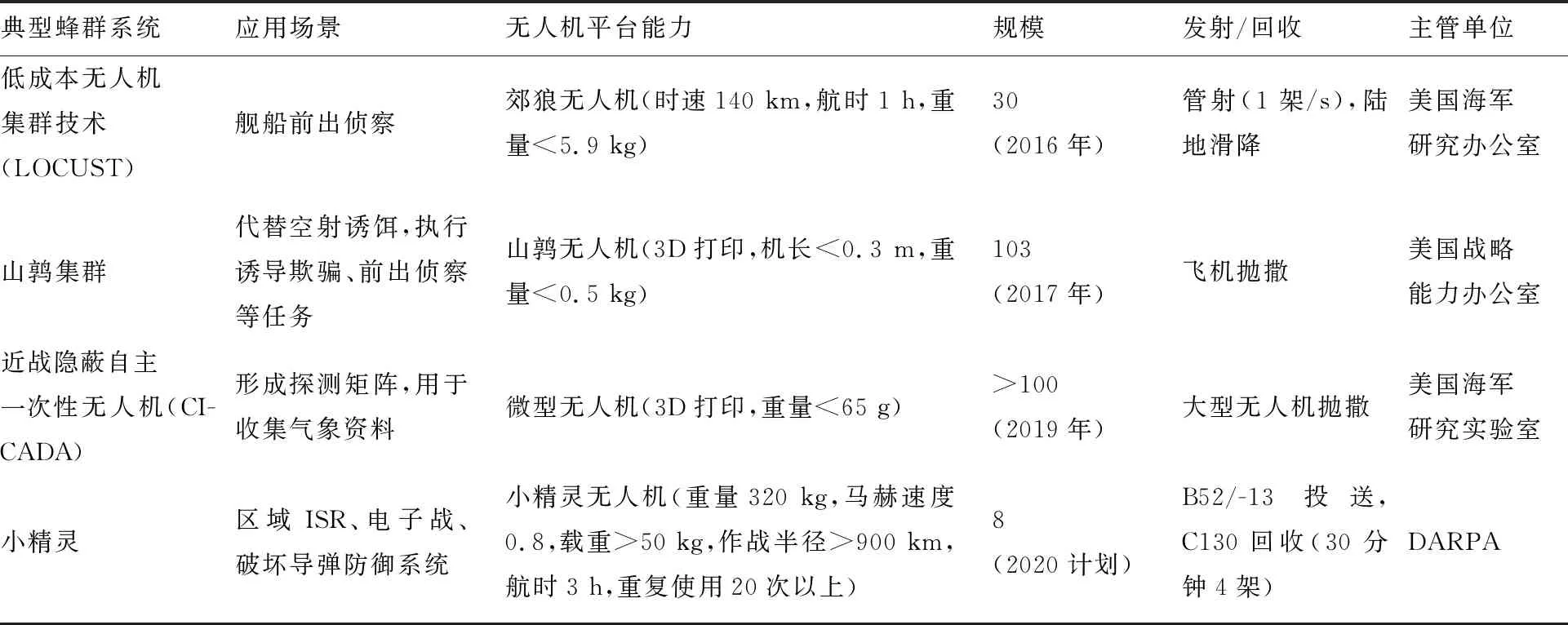
表1 典型無人機集群項目
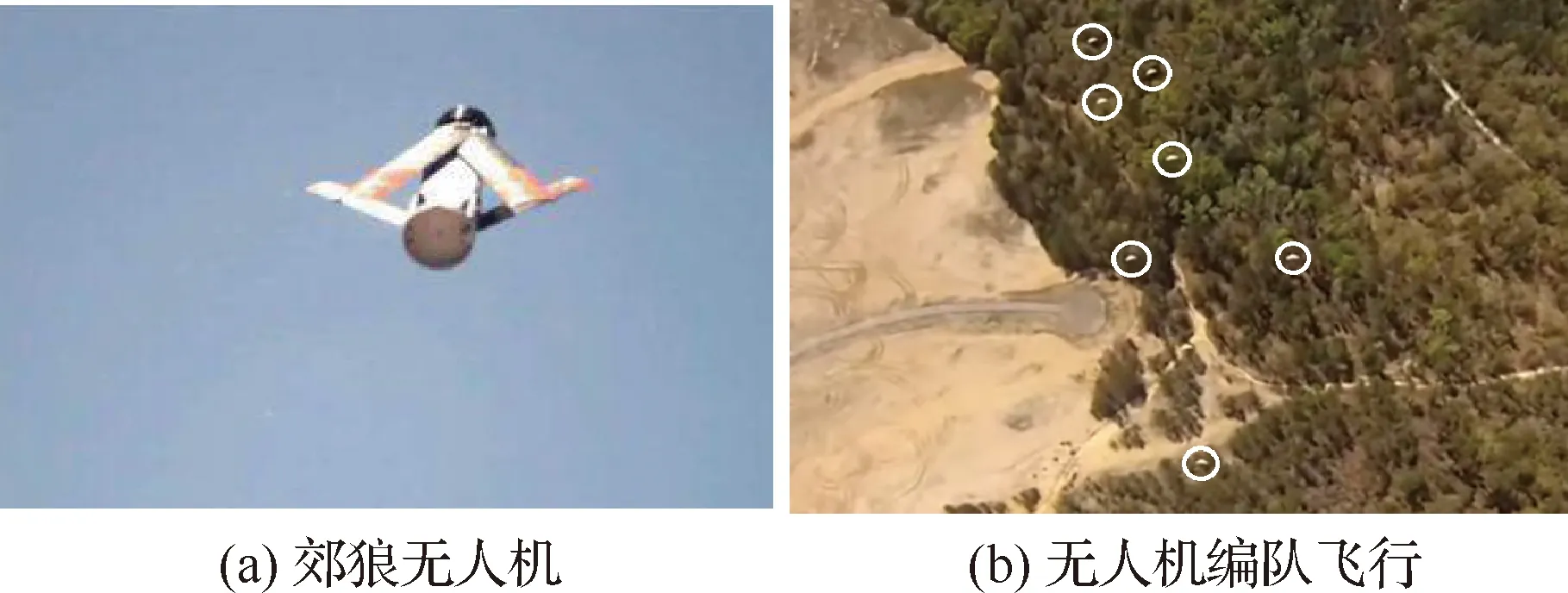
圖11 LOCUST項目的郊狼無人機及編隊飛行[36]
山鶉(Perdix)無人機集群項目由美國戰略能力辦公室(Strategic Capabilities Office, SCO)主導,采用有人戰機投放無人機集群代替空射誘餌等,執行誘導欺騙、前出偵查等任務。2016年10月,完成由3架F/A-18戰斗機空中投放103架“山鶉”無人機的演示驗證,集群展現了一些高級的行為如集群決策、自適應編隊以及集群自愈性,如圖12所示[37]。

圖12 山鶉”(Perdix)無人機集群演示[37]
近戰隱蔽自主一次性無人機(Close-In Covert Autonomous Disposable Aircraft, CICADA)項目由美國海軍研究實驗室(Naval Research Laboratory,NRL)發起。項目旨在開發低成本一次性微型無人機,每架只攜帶微型電子傳感器,比如天氣、溫度、濕度和氣壓傳感器等,借助大型載體像播種一樣向某個區域大量“播種”,形成龐大而穩定的“探測矩陣”。2017年4月,美海軍從P-3偵察機上一次性釋放32架CICADA微型無人機;在2019年4月,4架大型無人機(Hives)釋放了100多架小型CICADA微型無人機編隊,用于收集區域的氣象資料,如圖13所示[38]。
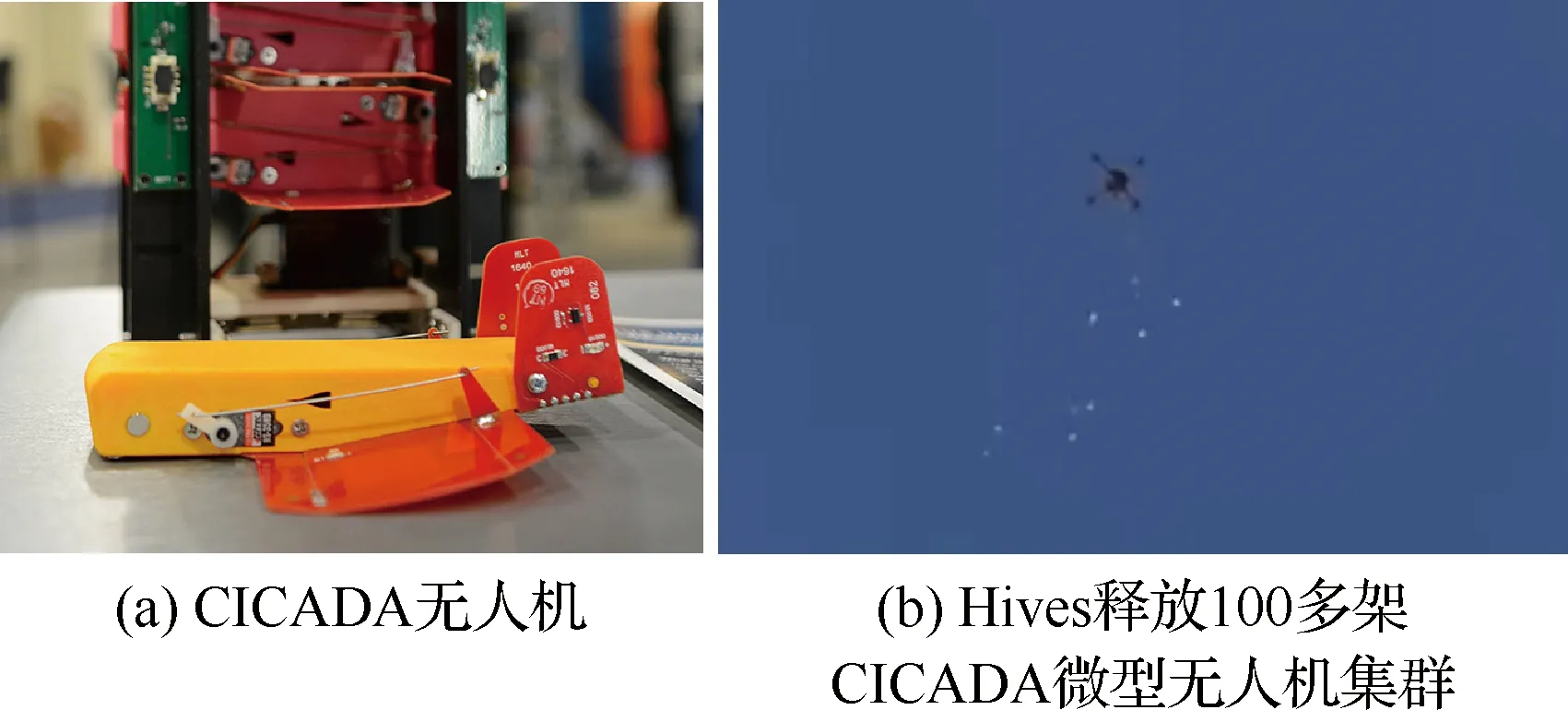
圖13 CICADA無人機集群演示[38]
可空中回收無人機集群“小精靈”(Gremlins)項目(見圖14)[39]由DARPA主導。項目設想讓現有大型飛機充當“空中航母”,在敵防御射程外發射成群小型無人機;當任務結束后C-130運輸機將小型無人機回收,在24 h內完成重置并等待下次使用。項目于2015年9月啟動,目前正處于第3階段,計劃2020年春完成全流程試驗,具備在C-130上一個操作員最多控制8架無人機以及在半小時內空中回收4架無人機的能力。
美國之外,各區域強國也積極開展各類集群試驗。歐盟在未來空戰系統中,將空射無人機集群作為未來實施防區外精確戰術打擊和集群式飽和攻擊的核心手段。印度也于2019年發布了首個無人機集群概念項目ALFA-S(Air-Launched Flexible Asset-Swarm),計劃通過戰斗機發射大量差大一體無人機,執行對地防空打擊任務[40]。土耳其國營STM軍工集團展示了20架7 kg的四旋翼無人機集群作戰反恐的概念演示[41]。
圖14 “小精靈”項目[39]
中國也積極開展固定翼無人機集群的飛行驗證[4]。中國電子科技集團(簡稱中電科集團)先后完成了67架、119架、200架的固定翼無人機集群飛行。2018年1月,國防科技大學智能科學學院無人機系統創新團隊針對無人機集群自主協同展開試驗飛行[42],20余架無人機相繼起飛,在空中集結編隊,飛向指定區域完成偵察任務,驗證了分組分簇自適應分布體系架構、并行感知與行為意圖預判、按需探測自組織任務規劃、極低人機比集群監督控制、以意外事件處理為核心的集群自主飛行控制等多項關鍵技術。北京航空航天大學仿生自主飛行系統研究組結合生物群體智能深入研究了無人機集群編隊、目標分配、目標跟蹤、集群圍捕等任務的關鍵技術[43],并于2018年5月完成基于狼群行為機制的無人機協同任務分配的飛行驗證,如圖15所示。
3 關鍵技術研究現狀及分析
以無人機為典型代表的無人集群系統中,如此眾多的單體如何不沖突地一起工作?關鍵在于集群控制。無人機集群協同控制是指大量無人機平臺配合完成OODA循環的全回路[44],使各平臺在“正確的時間、到達正確地點、執行正確的任務”,獲得“1+1+…+1?N”的集群協同效能,且具備去中心化、自主化和自治化的特點。圖16 從OODA 的視角,給出了目前關于集群協同的典型研究方向,包括協同觀測、協同偵察、協同定位與建圖、任務分配、任務規劃、聚集、蜂擁、編隊等。
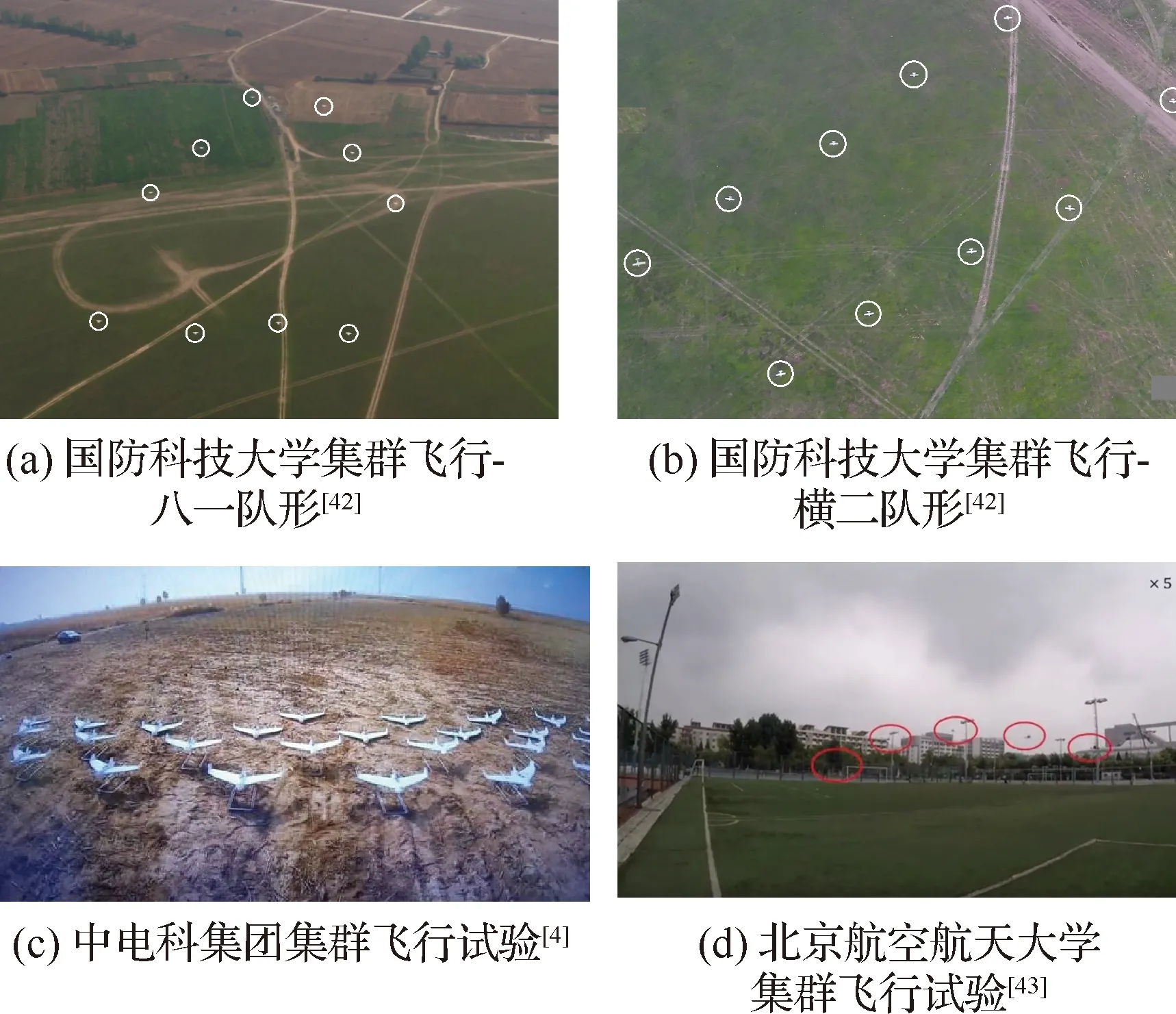
圖15 中國開展的典型集群飛行演示實驗
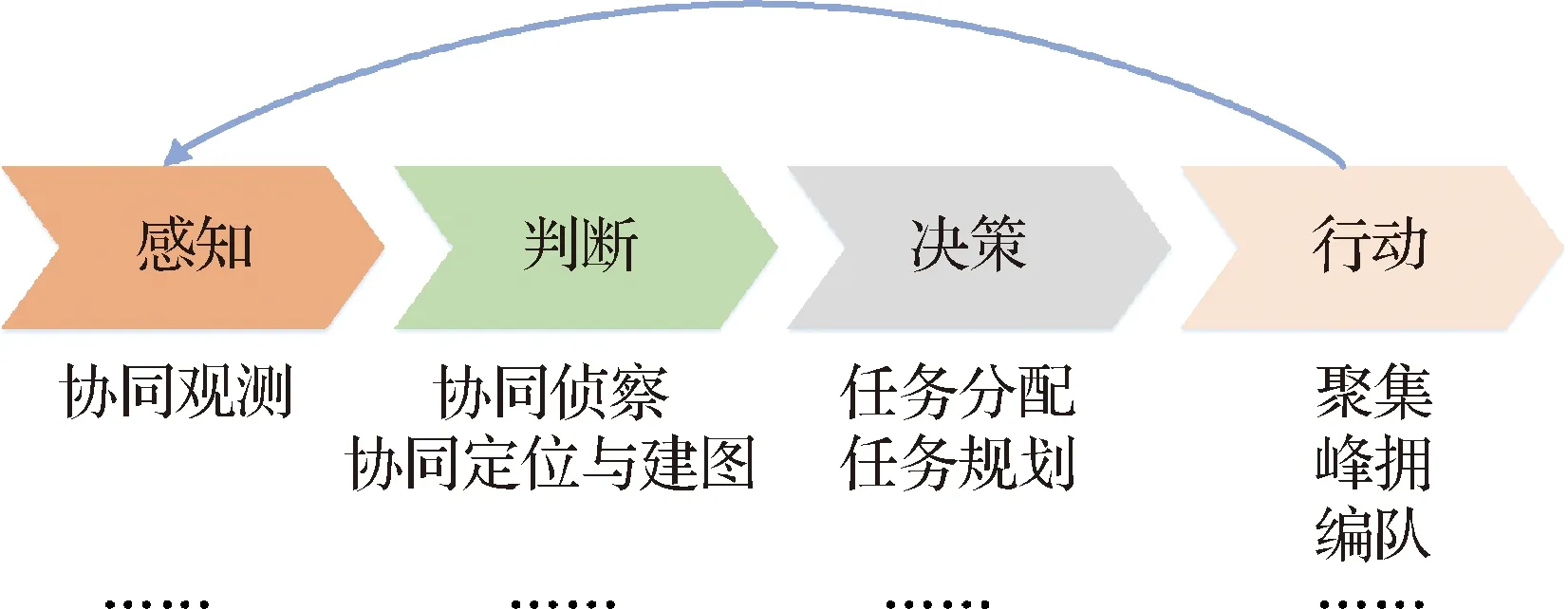
圖16 集群協同的典型研究方向
無人機集群協同涉及 OODA 循環的全任務回路,勢必將成為未來高技術戰爭背景下各大國之間競爭的技術高點。本節將專注于集群于 OODA 回路中末端環節,圍繞分布式“決策和行動”的關鍵技術展開。
3.1 集群控制的挑戰
無人機集群控制本質上可以看作是尋找對整個大系統的最優控制策略,其復雜性主要體現在以下6個方面:
1) 數量多:通常考慮幾十上百,甚至成千上萬架無人機,協同難度隨著數量增加急劇增加。
2) 異構性:集群成員通常具有相同基礎平臺,但是配置的傳感器、偵察/武器載荷可能不同,導致完成特定任務的能力也不同。在執行任務過程中需要對集群成員按照不同能力進行合理分配。
3) 任務多:集群通常需要同步并行完成不同的任務;不同類型的任務具有不同的要求,且任務之間可能存在約束關系。
4) 約束多:除無人機系統性能約束外,還包括戰術要求約束、戰場環境約束、通信約束、平臺空間約束、時間約束、任務耦合約束、航跡防撞約束等以及約束間大量錯綜復雜的耦合交聯關系。
5) 動態變化:集群執行任務面對的態勢通常動態變化,且目標、威脅、任務以及無人機本身狀態均處于不斷變化中;特別地,在對抗環境中決策和行動可能受到敵方決策和行動的影響。
6) 不確定性:由于傳感器信息的不確定性和通信信息的不確定性,無人機對當前態勢的感知也是不確定的。
以上各個方面的因素交織在一起,形成的建模復雜性、組合多樣性、信息不確定性、計算復雜性和時間緊迫性,以及無人機集群成本受限/動力學復雜/機載資源有限等特點,使得無人機集群控制問題極富挑戰,如圖17所示。
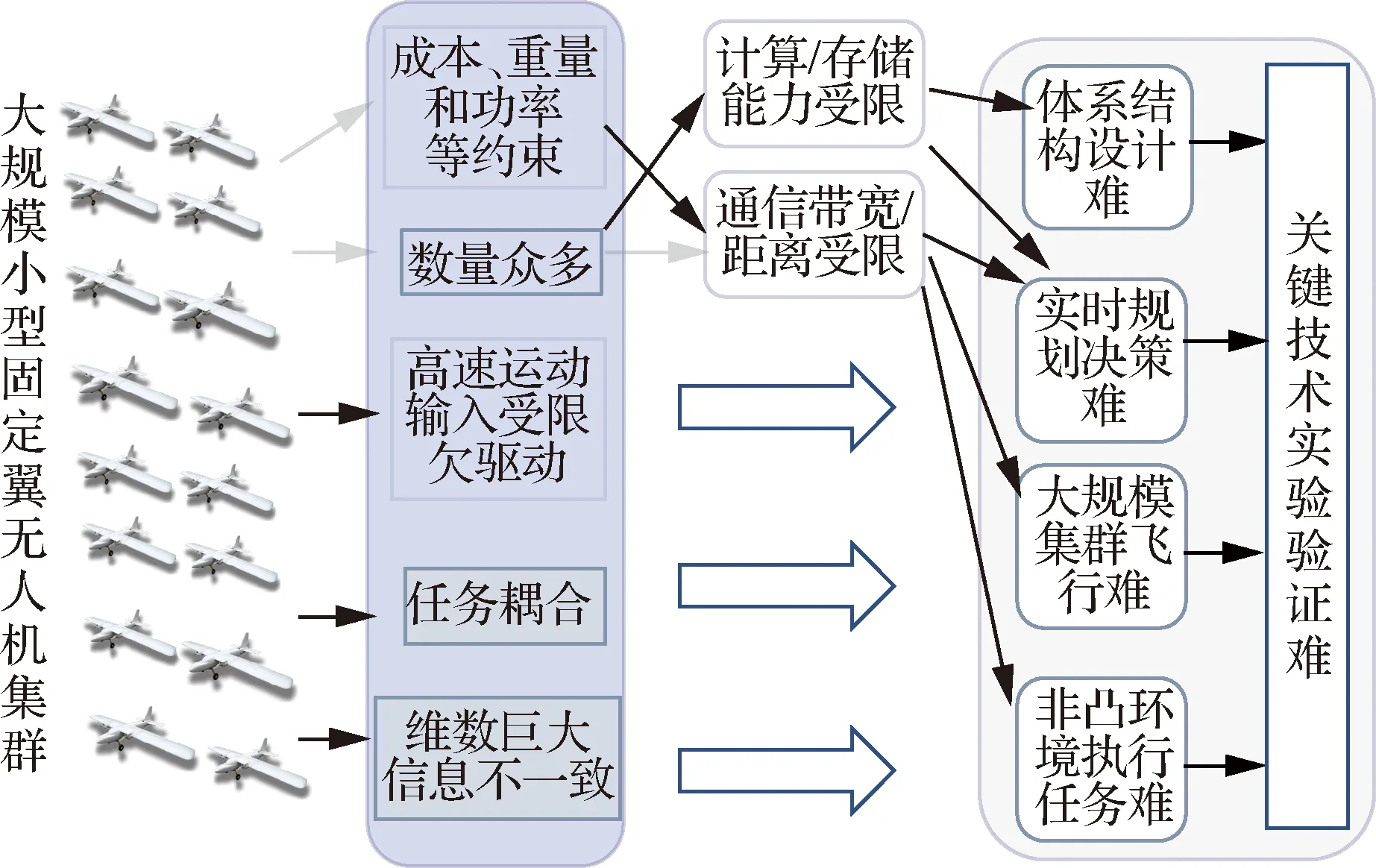
圖17 大規模小型固定翼無人機集群控制的挑戰
3.1.1 重量/功耗/空間/成本限制對機載通信、計算和存儲能力的約束
小型固定翼無人機可供載荷使用的重量、功率和空間非常有限。以某小型固定翼無人機為例,其可用載荷重量(不包括電池、機體重量)≤ 1.5 kg,可用載荷體積<10 cm×10 cm×15 cm,可用功率< 60 W。同時,要建立成本可承受的無人機集群系統,單機成本不能過高;考慮到無人機系統的安全和冗余設計,分解到各核心載荷上的成本非常受限。苛刻的載荷重量、功耗、空間以及成本約束,使得自駕儀、計算/存儲設備、自定位/機間定位設備、通信/感知等載荷的集成設計非常具有挑戰性。考慮到設備性能和功耗/體積/重量以及價格等往往互相制約,故而各類載荷的性能必須折衷設計,使得機載通信、計算和存儲的性能非常受限。
3.1.2 數量規模給集群控制帶來的挑戰
集群系統的性能受梅特卡夫定律的影響,即數量規模的增大將導致協同難度的指數上升,在系統實現、集群管理、協同控制等技術上存在拐點效應,在系統性能如收斂性和穩定性等方面存在天花板效應。同時,小型固定翼無人機集群系統的通信距離和帶寬等性能受限,通信網絡拓撲結構的設計存在約束,難以做到大容量的機間信息分發和任意拓撲結構傳輸,進一步壓縮了大集群系統在理論上的最優性能。特別地,當機間信息流和數據流存在擁塞時,集群系統的性能會急劇惡化。故而,大集群和通信受限都對體系結構設計、協同規劃決策、集群飛行控制、低人機比指控等提出了苛刻的要求。如何實現大規模的無人機集群協同控制,尚是一個極富挑戰的課題。
3.1.3 任務耦合、局部信息不一致和維數爆炸給集群控制帶來的挑戰
集群通常可以采用“點面結合”的方式同時遂行多重任務,但是集群任務通常具有不確定性,且彼此耦合。例如在集群協同區域偵查和目標抵近跟蹤的典型任務中,偵察和跟蹤任務耦合,地面目標數量/運動狀態不斷變化(動態出現/被遮蔽,且不規則運動等),無人機數量不斷變化(部分損毀/部分返航補充燃料/部分通信失聯等)、環境區域復雜(山區環境,通常為不規則的非凸構型)等,導致集群任務協同通常無法得到閉式的全局優化解。進一步,集群采用分布式感知/通信和鄰域協作方式,機間的信息傳遞步長有限,導致機間信息不一致性,更進一步加劇了優化的難度。另一方面,集群協同需要考慮多平臺空間約束、時間約束、任務耦合約束、航跡防撞約束等以及約束間大量錯綜復雜的耦合交聯關系,使得決策變量數量成倍增加;固定翼無人機動力學的復雜性更增添了優化約束的復雜度。故而,任務的復雜性/多樣性和集群數量導致決策空間急劇膨脹和高度耦合,使得集群控制問題建模困難、求解困難。維數的增加必然帶來規劃時間性能的降低,對于時敏性任務,必須在算法最優性和時間性能之間權衡。特別地,由于集群系統的計算/存儲能力極度受限而數量規模巨大,更是對集群控制帶來了巨大的挑戰。
3.1.4 無人機動力學給集群任務協同帶來的挑戰
黃琳院士指出:“運動體所表現出的具有強非線性、強實時變與強耦合性和高不確定性的特征使得問題變得特別困難,例如…非線性非完整約束、…欠驅動問題…”[45]。小型固定翼無人機是典型的欠驅動、非線性高速運動體,存在巡航速度、最大/最小速度/角速度等約束,且其空氣動力學參數和飛行速度密切耦合。以“雙子星”無人機為例,其巡航速度約為16 m/s,失速速度約為12 m/s,最大速度約23 m/s。并且,無人機在飛行中不可避免地受到機體振顫和陣風等影響,但是由于機體重量輕、推力小,主動抗風性能較差。故而,固定翼無人機因其強非線性特點,在集群協同的規劃決策、起飛降落、通信組網、集群飛行等方面均比“準靜態”的旋翼無人機集群復雜得多。
3.2 集群控制關鍵技術研究現狀
以集群協同遂行“OODA”控制回路為背景,國內外在集群體系架構、集群通信與組網、集群決策與規劃、集群無人機系統、集群飛行與隊形重構、集群安全、集群指控等關鍵技術領域開展了大量理論和應用研究
3.2.1 集群體系架構
采用何種結構將多個無人平臺組合起來發揮更大效能,是集群實現首先要解決的問題。根據信息交互的策略,現有集群架構通常可分為集中式和分布式架構。分布式架構具有較好的擴充性和容錯性,能夠將突發影響限制在局部范圍內,適宜于大規模系統。例如,美國海軍的LOCUST項目就采用典型分布式架構。
不同于單體體系架構,集群體系必須綜合設計集群間以及單機內部結構。過去幾年,無人機集群領域進行了較多體系結構相關的研究。Sanchez-Lopez等[46-47]針對多無人機系統提出了一種混合反應/慎思式的開源體系架構AeroStack,包含了反應、執行、慎思、反思和社會等5層。Grabe等[48]提出一種異構無人機集群的端到端控制框架Telekyb,其高層任務(例如任務規劃等)集中運行在地面端。Boskovic等[49]提出無人機群的6層分層結構CoMPACT,有效結合了任務規劃、動態重分配、反應式運動規劃和突發式生物啟發群體行為等,將任務執行分為任務、功能、團隊、班排、無人機等級別。但是:上述工作均主要針對小規模四旋翼無人機集群,并沒有針對固定翼無人機設計,特別是沒有考慮固定翼無人機高速運動所需的強實時性。相比之下,Chung等提出了一個群體系統并演示了多達50個固定翼無人機的實時飛行實驗[50]。然而,該工作更多地集中在無人機集群的系統實現設計,包括自主發射、起降和飛行等,不支持集體行為和任務協調等。
總體而言,集群體系架構領域還存在以下挑戰:① 規模可擴展性:絕大多數工作只在小規模系統(通常2~5架)驗證。隨著規模增加,不論在理論還是系統實現上,集群系統的難度指數上升,體系結構設計也更有挑戰。② 多樣性:現有方案通常只關注特殊領域,很少可以適用多種任務。然而,高度自治化的集群系統需要支持多樣化任務。另外,目前集群架構設計主要針對旋翼無人機集群,還欠缺適宜于執行多樣化任務的大規模固定翼無人機集群的體系架構。
3.2.2 集群通信與組網
機間通信是集群協同的基礎之一。集群通信一般考慮空中無人機和機面控制站之間,以及集群無人機之間的通信。無人機集群的地面控制站,通常配備有通信設備(常使用未經許可的無線電頻段,如900 MHz),采用點對多點或廣播方式,向無人機發送控制命令和接收遙測數據[51]。通常,遙測數據包括GPS信息、無人機狀態信息以及機載載荷的感知信息等。集群無人機之間的通信主要用于無人機之間的狀態和載荷信息交互。本節主要關注集群無人機之間的通信。固定翼無人機集群由于節點數量多、任務種類多、飛行速度快、相對時空關系變化頻繁以及信息傳遞的即時性和突發性等,使得集群之間的通信和組網具有很大的挑戰性。
通信體系結構是無人機組網設計的核心內容之一,合適的網絡結構,可以提高通信數據以及上層任務執行的效率和可靠性。當前的無人機集群通常采用2種通信架構形式之一,分別為基于基礎設施的集群架構和基于自組網(ad-hoc)的集群架構。
基于基礎設施的架構包含基站(例如和地面站相連的地面基站或者通信衛星),所有的無人機都和基站直接相連[52]。基站接收集群中所有無人機的遙測信息,并轉發給其他所有或部分無人機。故而,該架構也可稱為以基站為中心的通信組網。該架構優勢在于:① 可以借助地面高性能計算設備進行復雜的實時計算和優化。② 機間聯網不是必需的,可以減少無人機的有效負載[52-53]。但是基于基礎設施的架構嚴重依賴于基站,系統缺乏冗余性,且基站和無人機之間的通信可能容易受到干擾;如果基站受到攻擊或干擾,整個集群的可操作性將受到損害。同時,基于基礎設施的架構要求所有無人機都必須在基站的傳播范圍內;特別地,小型無人機的負載能力極度有限,與基礎設施建立可靠通信所需的硬件可能會限制基于基礎設施的集群功效,限制了集群無人機的運動范圍。另一個缺點是缺乏分布式決策能力,通常通過地面站協調所有無人機的決策。和集中式體系架構類似,隨著規模的增加,通信數量、決策維數等存在維數爆炸的問題,限制了集群規模的增加;同時,不可避免地存在通信時延,使得系統難以實時響應決策。
基于自組網的集群架構將無線自組網和無人機集群結合。無線自組網不依賴于基礎設施,無需路由器或接入點;相反,基于動態路由算法動態分配節點。近年來,人們將移動和車載自組網概念拓展到無人機網絡通信中,形成飛行自組網(FANET)[52-55]。無人機間的信息交互,不依賴于任何已有的基礎設施,而是臨時建立起適應節點動態變化的機器對機器(M2M)通信網絡[56];不需無線接入點(Access Point),但是至少有一個網絡中的節點連接一個地面基站或者衛星。文獻[57] 從移動性、拓撲和能耗等方面比較了移動自組網、車載自組網和無人機自組網,并比較分析了各種自組網的路由協議和節能策略。文獻[58]綜述了無人機集群在民用領域,包括搜索援救、覆蓋偵查和運送物品等應用中通信組網的特點和需求。和移動或車載自組網相比,飛行自組網具有自身特點。① 節點的高速移動和拓撲的高動態變化。典型的移動和車載自組網節點通常是人和汽車,而飛行自組網節點則是高速飛行的無人機,移動度遠高于移動或車載自組網,導致其拓撲變化比移動或車載自組網更為頻繁。② 節點稀疏性和網絡異構性。集群中的無人機執行任務時通常是分散分布的,機間距離大都千米級,遠大于移動或車載自組網節點間的距離,導致空域內節點密度較低。同時,實際應用中,無人機還需和衛星、有人機、地面機器人等不同類型的平臺通信,網絡拓撲可能分層分布。③ 節點任務的多樣性。無人機集群系統可能包括不同類型的傳感器,并且每個傳感器可能需要不同的數據傳輸策略。比如,需同時支持高頻/實時的控制/決策通信需求(時延毫秒級)和協同感知等任務需求的大容量(M級)機間傳輸;支持突發任務響應,可隨時發起點對點或者點對多點的通信。④ 更高可靠性和更低重量要求。小型無人機載荷重量有限;同時空中無人機一旦失控,很容易造成機毀人亡。故而,飛行自組網在嚴格限制端機重量條件下,對網絡協議和軟硬件可靠性有嚴苛要求。目前,其仍面臨著嚴峻的技術挑戰:
1) 有限的單跳距離[52,55]:飛行自組網的建立依賴于每架無人機之間的單跳通信,而要想通過有限的機載能力實現可靠的通信,其單跳距離往往受到了限制,這成為了約束飛行自組網技術發展的重要因素之一。
2) 難以可靠控制的丟包率[59]:飛行自組網中,對動態路由的配置提出了很高的要求,迅速改變的物理層道 會使原有拓撲的路徑變得不再可靠,從而導致數據的大量丟包,這會嚴重限制無人機集群的任務執行能力。
另一方面,在基礎架構、硬件設備、通信帶寬等固定的情況下,根據任務需求進行通信調度,可最大限度地挖掘通信系統的性能。目前,協同飛行任務中的通信需求研究較多。通常,其通信拓撲要求無向連通或存在有向生成樹,拓撲切換和通信時延等存在必要條件[60-61]。但是,目前對其他任務,比如協同探測、協同規劃等通信需求的研究較少。
3.2.3 集群決策與規劃
集群規劃的內涵是“在線實時為集群內的每架無人機生成從當前/起始位置到目標位置的運動任務,要求集群任務總代價最低(較低),同時實現集群內相互避碰以及避免與環境碰撞”。
和體系結構一樣,規劃決策可以采用集中或分散式方法解決。集中方法中,有一個中心節點可以獲得所有無人機的信息,問題轉化為對整個集群的單一優化問題[62]。分散方法中,每架無人機依賴獲得的全局或者局部信息單獨求解[63]。介于兩者之間的是半分散式系統[64],它充分利用無人機的分布式計算能力,但仍然需要中心節點進行信息融合或全局約束條件的判斷。
無人機集群的規劃決策可以涉及不同層次,部分算法直接作用于無人機的控制輸入,部分算法則聚焦于無人機的任務或行為。POMDPs提供了一種優化的數學框架來建模無人機與環境交互過程[65],可在同一框架內通過優化合并的目標函數實現不同層次策略的組合,因此得到了廣泛的使用。對于無人機集群系統,POMDPs 可以擴展為 MPOMDPs(集中式)或Dec-POMDPs(分散式)[66-67]等。進一步,為解決集群信息不一致和狀態不確定問題,考慮信息融合的多無人機POMDPs求解算法也得到了研究[67-68]。
集群任務的不確定性,給規劃決策帶來了極大挑戰。任務規劃通常是PSPACE完整的,尋求精確解的規劃算法僅限于在低維系統可行。集群通常由大量個體組成,同時還具有底層空間的高維度特性,導致緯度巨大且計算復雜。規劃算法對問題維度呈指數依賴,即使離線都難以求解。進一步,與地面機器人相比,無人機速度更快,動力學系統更復雜,機載計算能力更有限,故而,無人機的規劃決策算法必須盡可能降低計算量,且具有強實時性。美國空軍技術研究院以無人集群廣域搜索/打擊一體化任務為研究背景,通過群間任務分配、群內任務協調、路徑規劃和軌跡優化 4個 層次的分層優化,使得無人平臺能夠針對復雜任務實現層次化協調,極大地減小了在線計算負載。但是,總體而言,為適應瞬息萬變的復雜動態環境,如何實現兼顧優化性和快速性的動態決策和任務/航跡重規劃,仍然還是挑戰性的問題。
3.2.4 集群無人機平臺系統
集群無人機平臺系統,包括平臺和飛行控制系統,是集群形成能力的基礎。集群具備的優勢與無人機系統的特性息息相關,合理的平臺設計和精確的飛行控制能大幅提升集群性能。
無人機平臺是集群遂行多種任務的載體,其性能和作用范圍也在不斷增加。伴隨性能增加,平臺的成本也在不斷增加,如何兼顧平臺成本和性能是集群走向實戰的必由之路[69-70]。集群內部信息需要交互與反饋,動作需要協同與配合,任務需要分工與合作,這些都需要平臺和載荷的參與[71-72]。通常而言,集群采用低成本的常規中小型無人機(10~100 kg),其性能差異并不明顯。單平臺主要評價指標有:航時、巡航速度、最大航程、最大升限、載荷能力、機動性(最小轉彎半徑,爬升速率、下降速率等)、穩定性、跟蹤定位性能等。除此之外,集群無人機平臺更關注自組織、自適應和信息交互特性。特別地,考慮到集群的數量優勢,集群無人機應特別注重成本控制,包括低成本結構設計、模塊化組裝調試、數字化精確飛控與導航、小型化能源動力和多功能組網通信等。以美軍“小精靈”無人機為例,其設計目標為作戰半徑555~926 km;續航時間1~3 h;設計載重27.3~54.5 kg;飛行速度0.7~0.8馬赫;發射高度12 192 m以上;推進系統可選型現役發動機、改進型動機或全新設計型發動機;有效載荷功率800~1 200 W;有效載荷模塊化設計,應包括光電/紅外傳感器、無線電系統等;無人機至少可重復使用20次,具備空基發射回收能力;出廠單價(不包括載荷)低于70萬美元/臺。
飛行控制系統為無人機提供了精確飛行和適應復雜環境的能力。低成本固定翼無人機的飛行控制具有較大的挑戰性,主要包括:
1) 模型不精確:固定翼無人機氣動復雜、操縱耦合,且可控制性不足。特別地,由于成本原因,小型無人機很難采用風洞吹風等手段建立準確的動力學模型。
2) 交叉耦合:固定翼無人機的動力學和控制嚴重耦合。通常情況下,無人機平臺控制采用解耦方法分內層姿態和外層位置控制。然而,這2層 間是嚴重耦合的,如協調轉彎時涉及滾轉和航線控制,速度控制也通常和高度耦合。
3) 噪聲:一般來說,傳感器越昂貴,測量就越精確。因此,集群中對無人機的低成本要求導致了其獲取信息的噪聲和不準確。
4) 風擾:無人機飛行過程不可避免地受到風的干擾。風擾,尤其是側風對無人機飛行影響重大。在集群任務飛行中,無人機常需低空飛行(通常低于1 000 m,甚至不超過100 m),以便對地面物體進行抵近觀察。低空飛行的風擾給控制影響更為嚴重。對于小型固定翼無人機來說氣流擾動的速度會占到無人機巡航速度的 20%~60%。
為解決飛行控制問題,研究人員開展了許多理論和工程研究。各種開源自駕儀被廣泛的應用在小型固定翼無人機系統中[70]。它們一般采用分層控制策略,通常包含位置層、姿態層和執行層,各層采用不同的控制頻率[69]。各層控制方法大多采用各種比例-微分(PD)控制或者自抗擾控制 (ADRC)[73]。特別地,運動控制,包括軌跡跟蹤和路徑跟蹤控制,作為無人機自主飛行的直接體現,在近年受到廣泛關注[74-75]。相比于軌跡跟蹤,路徑跟蹤無需考慮時間參數化表示,在集群任務飛行中得到了廣泛的應用。各類路徑跟蹤算法通常可以劃分為線性和非線性控制方法。線性方法主要包括比例-積分-微分(PID)[76], 線性二次型調節器(LQR)[77-78]等,非線性方法包括矢量場法[79-81], 視線法[82], 虛擬跟蹤目標法[83], 基于非線性控制理論方法等[84-86]。文獻[87]針對小型固定翼無人機的路徑跟蹤問題,分析比較了5種算法的性能,分別為逐點法(carrot-chasing), 非線性導航律(NLGL), 純追蹤和視線法(PLOS), LQR,和矢量場(VF)法。結論表明在直線和圓形路徑跟蹤中,VF法的跟蹤精度等性能最高。但是針對更一般意義上的曲線路徑跟蹤問題,目前還沒有類似的比較性研究。
集群無人機另一個具有挑戰性的問題為自主起飛和著陸。與單個無人機相比,集群無人機的自主起降具有更大的挑戰性。需考慮3個方面的問題:
1) 魯棒性:因為集群中的無人機可能具有不同負載、不同質量分布和不同機械條件,且在不同的風場條件中工作,故而起降控制在存在質量變化、機械不確定或風擾時應具有較好魯棒性。
2) 快速性:因為集群無人機數量多,需要盡可能地降低單個無人機的起飛或著陸時間,以最大限度地延長任務時間。
3) 意外事件的快速處理:為避免連續起降過程中的連鎖反應,應快速地處理起降過程中可能的突發事件。
目前,專門針對集群無人機特性的起降控制研究還很少,還值得在理論和工程中進行進一步的探索。
3.2.5 集群飛行與隊形重構
集群自主飛行是無人機協同執行任務的基礎,也是在復雜環境中遂行集群突防、分布探測和分布打擊等基本任務。面對不同的任務剖面、環境約束或者任務變化,集群通常需要變換隊形以高效完成任務。故而,隊形保持和重構的效果決定了無人機集群協同執行能力的有效性。
集群自主飛行與隊形重構是指設計分布式控制律使無人機集群保持特定三維結構的姿態和位置穩定飛行,達到時間和空間的同步,并能自動根據外部環境和任務動態調整隊形。但是,固定翼無人機欠驅動和輸入受限等模型約束,以及外部干擾、信息不完全等不確定條件,使得傳統的多智能體協同控制方法難以直接擴展應用。學者們圍繞編隊控制,產生了一大批豐碩的理論成果,可參考綜述文章[60-61,88-89]。
常用到的集群飛行控制方法脫胎于常見的多智能體協同控制方法,下面主要介紹領航-跟隨法和虛擬結構法。
1) 領航-跟隨法:將集群中某架無人機或引入一虛擬的無人機作為領航者(長機),其余無人機作為跟隨者(僚機)一起隨領航者運動。該方法是目前無人機編隊控制中應用最普遍、最基礎的一種方法。Leader-follower控制律主要是針對跟隨者的控制律,領航者則需要采用其他的控制手段。例如,文獻[90-91]采用無線電信號控制領航者,針對跟隨者設計了跟蹤領航者的編隊控制律,實現了2架固定翼無人機的編隊飛行;其中,跟隨者控制律分為外環和內環2層,外環控制器以最小化跟隨者相對于領航者的位置誤差為目標,生成期望的滾轉角和俯仰角以交給內環控制。文獻[92]使領航者沿航線飛行,跟隨者借助于機載的視角傳感器估計領航者的位置,利用設計的編隊控制律,實現了2架固定翼無人機按兩倍翼展距離的緊密編隊飛行。北京航空航天大學段海濱教授所在的研究團隊將領航-跟隨法結合文獻[93]中鴿群的分層策略[93],設計了小規模無人機集群的分布式控制方法,并通過8架無人機的集群仿真對算法加以驗證[94]。文獻[50]對20架固定翼無人機采用領航-跟隨法進行了飛行驗證,但是該文獻并未給出控制律的具體形式。而文獻[90-94]雖針對固定翼無人機設計了跟隨領航者的控制律,但是未作閉環系統穩定性的分析,也未考慮固定翼無人機控制受限的影響。
值得一提的是,領航-跟隨法作為最基本的編隊控制框架,很容易與其他方法——如勢場法[95-96]等相結合,還可應用諸如模型預測控制[97]、滑模控制[96,98-99]。領航-跟隨法的主要問題是當領航者損毀后,可能會導致整個編隊的癱瘓,為解決這一問題,很多研究使用虛擬領航者,并將編隊中多個真實的個體作為虛擬領航者的直接跟隨者[100-101],以避免全局領航者損毀后“牽一發而動全身”。文獻[100]研究了虛擬領航者的軌跡對各無人機已知的情況,以及虛擬領航者始終為當前無人機編隊重心時的情況,并用3架固定翼無人機對控制律加以驗證。文獻[102]研究了虛擬領航者的狀態僅對部分無人機已知,需對其他無人機設計分布式估計器估計虛擬領航者的位置,從而實現協同控制的問題。
2) 虛擬結構法。最早由文獻[103]提出,其核心思想是每個無人機跟隨一個移動的剛性結構上的固定點。加拿大多倫多大學的劉洪濤教授團隊利用虛擬結構法研究了多無人機的運動協調問題,并進行了數值仿真[104]。文獻[105]提出一種動態虛擬結構編隊控制方法,可使固定翼無人機沿規劃的編隊軌跡飛行時完成隊形變換。
虛擬結構法很好地避免了傳統領航-跟隨法當全局領航者損毀后,整個編隊面臨癱瘓的問題。事實上,虛擬領航者本質上也是將傳統的領航-跟隨法與虛擬結構法相結合[100]。虛擬領航者可以看成是基于虛擬結構法確定,每個無人機相對于虛擬領航者保持期望的位形,這一點又類似于領航-跟隨法中對于跟隨者的控制。由此,虛擬結構法與領航—跟隨法二者的界限在一定程度上也變得模糊。文獻[106]在基于虛擬結構法設計三維空間內固定翼無人機的編隊控制策略時,文獻[107]基于虛擬結構法設計獨輪車群體隊形保持控制律時,都用到了虛擬領航者這一概念。
對于小型固定翼無人機,由于受最小前向速度和非線性動力學的約束,集群飛行面臨著新的挑戰。目前關于固定翼無人機集群飛行的研究還較少。Gu等[90]設計了“外環導航/內環控制”的內外環結構的編隊控制器;Xargay等[75]研究了嚴格時序約束條件下的多無人機協同路徑跟蹤問題;美國海軍研究院完成了50架規模的固定翼集群飛行演示驗證,但并未涉及大規模集群的隊形保持、隊形變換等協同控制問題[50]。故而,如何基于小型固定翼的平臺性能約束,并考慮非理想通信等不確定性條件,實現大規模無人機集群飛行,仍然是一個挑戰性問題。
3.2.6 集群安全與沖突消解
無人機集群的安全控制是系統能夠順利執行飛行任務的關鍵技術之一,主要包括集群飛行安全和集群使用安全。
集群飛行安全指在復雜環境中,集群能夠無碰撞地飛行,主要包括集群內部的機間防撞和對集群外部障礙的規避。一方面,無人機集群的任務環境通常較為復雜,例如建筑物密布的城市環境、山峰懸崖林立的山區環境、樹木飛鳥集聚的森林環境甚至動態未知的戰場環境等,無人機集群飛行中不可避免地面臨與環境中各種障礙物發生碰撞的危險;另一方面無人機的數量規模不斷擴大,集群內各無人機在隊形變換以及任務調度過程中極有可能因為路徑交叉以及飛行不確定性等因素而發生碰撞沖突。近年來無人機的撞擊事故頻頻發生。2014—2016年間,官方報道的無人機與大型客機危險接近、發生撞擊的事件一共達到24起。2017年以來的情況更加嚴峻,相關的事故接連發生并且被頻頻報道。因此進行集群系統飛行安全控制的研究至關重要。
集群飛行安全控制問題的核心是碰撞規避問題。現有研究已經提出了各種各樣的理論方法[108-111]。綜合考慮各種方法的作用時間、適用場景以及理論基礎,主要可分為路徑規劃、優化控制、以及反應式控制3類。
1) 基于路徑規劃的碰撞規避[112]:基于先驗信息的全局路徑規劃算法最先應用于障礙規避的相關研究中,相關算法也擴展到了多智能體系統,從而實現全局的協同路徑規劃,但是該類算法對動態環境障礙的可擴展性較低。目前,基于傳感器在線感知的局部路徑規劃算法更多地用于動態環境的碰撞規避研究。相關方法包括A*、D*等圖搜索算法,混合整數線性規劃等數值優化算法,遺傳算法、粒子群算法等啟發式算法,以及勢場法。路徑規劃用于沖突消解通常能夠得到一條優化的無碰撞的飛行路徑,但是缺點通常是反應時間長,并且對于運動受限的固定翼無人機,不一定能夠找到可行解[109-110]。
2) 基于優化控制的碰撞規避[113]:基于優化控制的碰撞規避包括基于博弈論的方法、基于遺傳的方法、和基于預測控制的方法等。其中模型預測控制方法憑借其預測模型、滾動時域、和反饋校正3個機制,能夠顯式的處理各種約束條件,在碰撞規避問題中得到了大量的研究成果。并且,針對多智能體系統發展而來的分布式模型預測控制方法,能夠顯式的應對子系統之間的耦合約束,因此在多機器人和多無人機系統的研究中也得到了眾多學者的關注。存在的問題是,非線性、不確定性以及運動受限等系統特點對模型預測控制算法的理論分析帶來了很多挑戰,關于魯棒模型預測控制、非線性模型預測控制以及分布式模型預測控制的相關理論研究有待進一步研究和發展[114]。
3) 基于反應式控制的碰撞規避[115]:反應式的碰撞規避方法主要包括基于規則的、和基于幾何的2類。其中典型的算法包括速度障礙法、互惠速度障礙法等。該算法也進一步擴展至多智能體以及群體運動場景。該類算法的典型優點是響應快[109,115]。
綜上,基于路徑規劃的碰撞規避更新周期較長,適用于較遠距離的碰撞沖突場景;基于優化控制的碰撞規避的靈活性和適應性更強,適用于中短距離范圍的沖突場景;基于反應式控制的碰撞規避反應時間短,對動態場景的響應速度快,以最高優先級保證安全,適用于近距離尤其是各種突發的緊急碰撞沖突場景。盡管現有研究多種多樣,但一個關鍵問題是:現有方法大多針對單一或者特定的沖突場景,缺乏針對一體化任務環境的整體性系統解決方案。
集群使用安全是集群運用過程中安全相關問題,包括集群網絡安全、導航欺騙安全等。網絡安全方面,主要針對無人機集群通信被干擾或者部分無人機損毀(例如攻擊與誘捕等)后的響應。一種方案是進行通信中斷/平臺損毀后的拓撲重構[116-117],另一方案是設計具有一定抗毀性的通信拓撲[118-119]。導航欺騙方面,主要針對機載GPS等導航系統模擬信號誘騙的響應。一種方案為加強導航信號的識別和校核,另一種方法為研究各種GPS拒止環境中的導航技術,比如仿生導航[120]、視覺導航[121]等。
3.2.7 集群指揮控制
無人機集群協同極大地提高了遂行復雜任務的能力,但與此同時,隨著集群中無人機平臺數量/類型的不斷增加、任務類型的不斷擴展,如何高效地管控無人機集群,實現低人機比的集群指揮控制面臨著嚴峻的挑戰。
近年來,國內外在多無人機系統指揮控制技術方面已取得了豐碩的成果。美國諾·格、通用原子、波音、洛·馬、雷聲等參與軍方項目的公司已經進行了深入研究,并開展了相應的飛行試驗。例如,美國雷聲公司利用混合主動人機交互技術,推出能同時控制多架無人作戰飛機的駕駛艙(UCS)[122],是全世界第一種可以同時操縱多達8架空中、陸地或海上不同無人作戰飛機的地基駕駛艙。Proxy航空系統公司利用其開發的通用分布式管理系統(UDMS)[123],完成了2架“SkyWatcher”與2架“SkyRaider”無人機的協同飛行驗證,并能夠支持多達12個空中節點和超過30個地面節點(包括傳感器)的指揮控制。在美國軟件使能計劃(Software Enabled Control,SEC)[124]相關試驗中,麻省理工的研究人員研制出的有人機對無人機制導系統能使駕駛員通過飛行級英語話音指令制導控制另一架無人機,使無人機能夠及時對突然改變的計劃做出反應并避開意外威脅。但是,對于無人機集群的指揮控制技術,尚處于萌芽發展階段。
為滿足低人機比集群指控的要求,提高指揮員指控水平和態勢認知水平,需要研究適合指揮員習慣的語義邏輯任務描述方法,以更貼近于人類的方式對集群下達指控指令,綜合運用語音/手勢/眼動/觸覺等多種模式相結合的集群指控手段,來提高指揮員的指控水平,降低其認知負擔和工作負荷,實現低人機比條件下集群指控。Shah和Breazeal[125]提出,現有的人機交互系統主要通過顯式信息(明確的口頭信息等)及隱式信息(表情、手勢以及注視方向等)來實現人機交互控制。在顯式信息交互方面,文獻[126]中機器人能使用各種參考系(以自我、對象或外部為中心)有效響應人類的口頭命令;文獻[127]通過中央任務管理器將任務分配給機器人,進一步通過口頭交流有關目標、能力、計劃和成就的信息來完成協調。在隱式信息交互方面,文獻[128]使用機器目光建立共同注意力,將點頭用于鞏固彼此的理解;進一步,文獻[129]使用人的注視信息進行意圖解釋,例如猶豫或是搜索跑動對象;文獻[130]介紹了基于手勢的人機交互并將其分為2類,其中自由形式的交互允許用戶使用指示性手勢選擇機器人的子集并分配目標和軌跡,而形狀受限的交互要求用戶只對定義了整個形狀自由度所對應的子集實施控制;文獻[131]提出一種系統用于生成新一代的腦群控制接口,并為操作員提供對多智能體系統的豐富控制能力。
此外,隨著任務復雜度、任務執行環境高動態不確定性的影響,集群指控技術還需具備更高的自動化和智能化程度,將操作員從基本的任務剖面中解放出來,使其關注更高層次的決策與關鍵事件確認,通過智能化輔助決策系統,以“人在回路之上”方式完成無人機集群同步協調控制,提升動態不確定條件下任務執行的有效性及時效性,實現精細化、高效性的集群指揮。美國DARPA早在2007年啟動了“深綠(Deep Green)”計劃[132],其核心是通過分析推斷指揮員意圖,形成作戰方案的備選集合,提高指揮員的臨機決策速度。2016 年,美軍啟動了指揮官虛擬參謀(Commander’s Virtual Staff)項目[133],旨在通過認知計算,高效處理戰場態勢數據,自主推薦任務清單,輔助指揮員進行決策。Stodola和Mazal[134]提出了一個戰術決策輔助系統TDSS,并建立了基于無人機編隊偵察監視的戰術輔助模型。此外,國防科技大學王菖等[135-136]提出了基于指揮人員關注度和操作模型的信息調度算法,并提出了基于“人”疲勞度和錯誤率模型的自適應自主調度策略,實現了人-系統交互與功能分配的柔性切換過程。
4 未來發展趨勢
無人機集群兼具機械化、信息化和智能化的特點,有望在未來軍民領域發揮重大作用,但是目前尚不具備在復雜環境中分布執行任務的能力。集群協同的關鍵技術,如體系架構、通信組網、規劃決策、集群飛行等,雖然開展的研究較多,但是較少針對小型固定翼無人機的特點和復雜環境的任務需求展開。未來集群系統的發展,可以從以下6個方面考慮。
4.1 以群體智能為牽引,構建具有任務能力的無人機集群系統
群體智能廣泛存在于狼群圍獵、鳥群遷徙等生物群體活動和群策群力、頭腦風暴等人類社會活動中。其基本原理是通過個體之間的合作與競爭,聚合簡單個體行為形成群體合力,完成單純依靠數量疊加所無法勝任的復雜任務。無人機集群具有較強的運動能力和一定的感知決策能力,可模仿狼群、鳥群等生物群體活動,以無中心自組織的方式協同完成復雜任務。故而,一方面無人機集群是群體智能技術驗證和應用的理想載體之一;另一方面群體智能將賦能無人機集群系統,使得其能更高效地完成各類任務。
目前群體智能和集群系統的研究均較多,但是很多研究都停留在理論層面。特別地,如何有效結合兩者,如何根據群體智能的需求構建無人機集群系統,如何根據任務需求提升集群系統的智能程度,開辟一條從理論到實踐切實可行的方法路線尚有待于突破。
4.2 以多樣化任務為導向,設計易擴展互操作的集群體系結構
集群系統本質為數量眾多的獨立同構/異構實體通過通信構成交聯的復雜巨系統。隨著規模增加,集群系統的復雜度不論在理論研究還是系統實現上,均呈指數上升。故而,體系結構的設計一方面要解決該復雜系統的信息流/控制流的交互組織問題,另一方面也需要盡量在軟件/硬件上降低系統的耦合度和復雜性。通過規范化/標準化的軟件模塊、硬件組件和機間交互協議的設計,將不同數量,甚至是不同類型的無人平臺高效地結合在一起,是體系結構等頂層設計面臨的挑戰。特別地,現有集群系統往往只考慮執行單一任務,但未來期望集群系統能夠遂行多種不同的任務,比如同時兼顧邊境巡查、區域封控、通信阻塞等,體系結構的設計需要同時考慮多樣化任務需求。故而設計規模易擴展、適宜于不同任務的體系結構,是集群系統必須考慮的頂層設計。
4.3 以分布式在線處理為特征,提升協同OODA回路響應時間和行為決策能力
無人機集群需考慮多平臺空間約束、時間約束、任務耦合約束以及相互耦合關系等,其狀態空間將隨無人機的數量呈冪指數增長,使得集群系統的“OODA”必須以分布方式進行。同時,集群可以采用多平臺多視角等相關關系,提升“OODA”的效能。但是,現有“OODA”回路的相關算法大多采用集中式處理,很難直接擴展到規模較大、且可利用相關關系的集群系統中。另一方面,集群系統機載計算和存儲能力非常有限。但是集群在動態時變環境中,比如對時敏目標的察打一體中,需要很強的實時性。需要較大計算/存儲的OODA算法無法直接在集群系統中使用或者難以滿足快速OODA的需求。故而,滿足機載性能要求,采用分布式處理的快速“OODA”相關算法,將是集群系統未來的重要發展方向。
4.4 以意外事件處理為核心,設計大規模集群協同飛行控制算法
目前,固定翼無人機集群飛行規模已達100架以上,但尚未見公開發表的學術論文。系統規模的進一步增大,關鍵在于其可擴展性研究。良好的可擴展性可以確保無人機動態加入和退出集群時,系統仍然能夠維持較好的穩定性,并能夠保持較好的控制精度。故而,集群規模可擴展性研究在理論與實際應用上具有巨大的價值。
另一方面,現有飛行主要是在理想環境中進行。面向實際任務時,不可避免地存在各種意外情況,比如無人機部分損毀、各類空中移動障礙、突發天氣變化、通信干擾壓制、導航欺騙等。以意外事件處理為核心研究大規模集群穩健協同問題,將是無人機集群系統執行對抗性任務的行為基礎。
4.5 以低成本輕質化為特色,牽引無人機系統平臺/載荷/通信系統的研制
集群系統往往以規模優勢取代質量優勢,且不畏懼部分平臺的損毀,故而大規模集群系統往往嚴格限制單機系統的成本,包括平臺、機載控制器、感知/打擊載荷、以及通信端機等。同時,小型固定翼無人機的掛載重量非常有限,對上述載荷的重量也有嚴格要求。現有的無人機載荷往往追求大而全,性能較高,但是質量較重、價格較高,并不適合在無人機集群上直接使用。故而,研發滿足集群需求的低成本輕質化平臺和載荷,對集群任務能力的形成至關重要。
4.6 以平行仿真為手段,構建虛實結合的標準化開放性集群協同測試環境
集群系統的發展方興未艾,但是大規模集群的試驗驗證,組織困難且成本高昂,很大程度上限制了集群系統的能力提升。另一方面,集群協同理論和關鍵技術的研究缺乏整體牽引性,各種集群協同算法煙囪式發展,缺乏統一的基本任務、基礎平臺和可行的比較評判。一種可行的方式是采用平行仿真手段構建虛實結合的集群系統,既包含部分實物系統,也可任意添加高保真度的虛擬無人機系統,兩者混合執行任務。同時,設計典型任務,構建標準任務環境和開發接口,并以競賽的方式推廣開放開源給相關研究單位,協力推動群體協同系統任務能力的提升。
5 結 論
本文從無人機系統內涵、現有典型項目、關鍵技術3個角度出發,對國內外小型固定翼無人機集群進行了全面綜述。其中,在系統內涵方面,首先介紹了無人機集群系統的基本概念,分析了無人機集群協同執行任務的優勢,并給出了其在軍民領域的廣泛應用。在典型項目方面,從集群協同模式、指揮體系架構、基礎性研究、集群驗證4個 視角總結現有典型項目。在關鍵技術方面,對體系架構、通信組網、決策與規劃、飛機平臺、集群飛行、集群指控等核心要素進行深度分析。在此基礎上,論文展望了未來小型固定翼無人機集群的發展趨勢,期望能夠對未來無人集群系統的發展起到一定的牽引作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32