26 m射電望遠鏡副面調整機構誤差分析
2020-06-08 01:38:40古麗加依娜哈再孜汗項斌斌王娜艾力玉蘇甫陳卯蒸李寧薛飛
航空學報 2020年4期
古麗加依娜·哈再孜汗,項斌斌,王娜,艾力·玉蘇甫,陳卯蒸,李寧,薛飛
1. 中國科學院 新疆天文臺,烏魯木齊 830011
2. 中國科學院大學,北京 100049
新疆烏魯木齊南山射電望遠鏡(Nan Shan Radio Telescope, NSRT)是一臺26 m口徑全可動射電望遠鏡,采用 Stewart 并聯機構[1]對其副反射面(簡稱副面)進行空間五自由度位置(x、y、z方向平移,x、y方向轉動)精確調整。并聯機構具有定位精度高、剛度大、結構穩定、承載能力強、運動慣量小、動態特性好等特點[2-5],已成功應用于精確指向平臺、隔振平臺、太空望遠鏡次鏡頭與主鏡頭的實時對齊平臺、空間對接裝置以及射電望遠鏡副面調整機構等許多方面。近幾年國內外建成的射電望遠鏡大都使用并聯機構作為副面調整機構,例如國外 ALMA (Atacama Large Millimeter Array)[6]、GBT (Green Bank Telescope)[7]、Effelsberg[8]及國內 FAST (Five-hundred-meter Aperture Spherical Telescope)[9]、天馬[10]等。天線副面位姿調整是確保射電望遠鏡天線高精度指向的關鍵技術之一[11]。由于并聯機構結構的復雜性,存在并聯機構的制造和裝配誤差、形變誤差、機構傳動誤差、回零誤差等,導致并聯機構運動到目標位姿時的預期值和實際值之間存在較大偏差,嚴重影響了并聯機構的精度。NSRT改造之后的一段時間,對其進行不同波段轉換時,時常出現天線指向偏差過大的情況,初步判斷由副面并聯機構運動誤差引起,迫切需要對其進行誤差分析,找出誤差源并對并聯機構進行誤差補償,從而提高并聯機構的位姿精度。
為提高并聯機構的位姿精度,需要對誤差進行分析,建立精確的誤差模型。Masory等[12]研究了傳感器誤差及關節中心位置加工誤差的影響。Ehmann等[13-14]進行了一階和二階的誤差分析。Jelenkovic和Budin[15]使用 Ehmann 的模型對并聯機構進行了誤差分析。Tischler和Samuel[16]給出了計算關節回差影響的數值方法。Pott和Hiller[17]提出了一種計算關于某個位姿定位誤差的通用方法。Ahmad等[18]采用解析法分析了在外部載荷下鉸鏈變形引起的定位誤差。Zhou等[19]提出了一種基于 D-H 矩陣微分的誤差模型。李健等[20]使用消元法求解并聯機構所有關節變量的方法,建立了仿咬合并聯機器人的誤差模型。姚蕊等[21]對 FAST 饋源倉 Stewart 調整平臺進行了精度分析。針對零點位置誤差,李毅[22]的研究表明并聯機器人的運動精度主要受幾何誤差源的影響,基于對誤差源傳遞系數的分析,指出其零點誤差對末端位置誤差的影響遠高于其他幾何誤差源。郭云鵬等[23]運用空間矢量法建立了六自由度并聯機構的零點誤差模型。孫月海等[24]以Delta并聯機構為例,提出了一種基于視覺測量的零點標定方法。
本文在上述研究的基礎上,針對NSRT副面并聯機構出現定位誤差偏大的問題,用矩陣微分法建立了并聯機構誤差模型,通過誤差仿真實驗,研究了桿長誤差、鉸鏈誤差及回零誤差對并聯機構末端精度的影響。用Leica激光跟蹤儀測量了NSRT副面并聯機構的運動精度,對比實測結果與誤差模型的仿真結果,確定了影響并聯機構末端位姿精度的主要誤差源。
1 系統組成
如圖1所示,NSRT副面并聯機構的定平臺與射電望遠鏡的副面支撐結構相連;副面與并聯機構的動平臺相連,由動平臺帶動副面進行五自由度運動。饋源倉安置于主面,射電望遠鏡不同的工作波段對應不同的饋源,通過副面及并聯機構的運動調整副面的位姿,使微波信號經過副反射面的二次反射后進入相應饋源,這就要求副反射面的焦點與預定工作饋源的相位中心實現精確對焦。
如圖2所示,并聯機構主要由動平臺、定平臺、上下虎克鉸、運動控制器及連接于動平臺和定平臺之間的6套伺服電機控制的電動缸構成。電動缸與動平臺及定平臺均采用間隙小、可承受大載荷的兩自由度虎克鉸鏈接,通過6個電動缸的協調伸縮實現并聯機構動平臺在空間的五自由度運動。其運動范圍為:x、y方向平移±50 mm、z方向平移 ±80 mm;繞x、y軸旋轉角度±5°。在天線0°~90°任意姿態下,動平臺的重復精度:線性誤差小于0.07 mm;角度誤差小于0.01°。
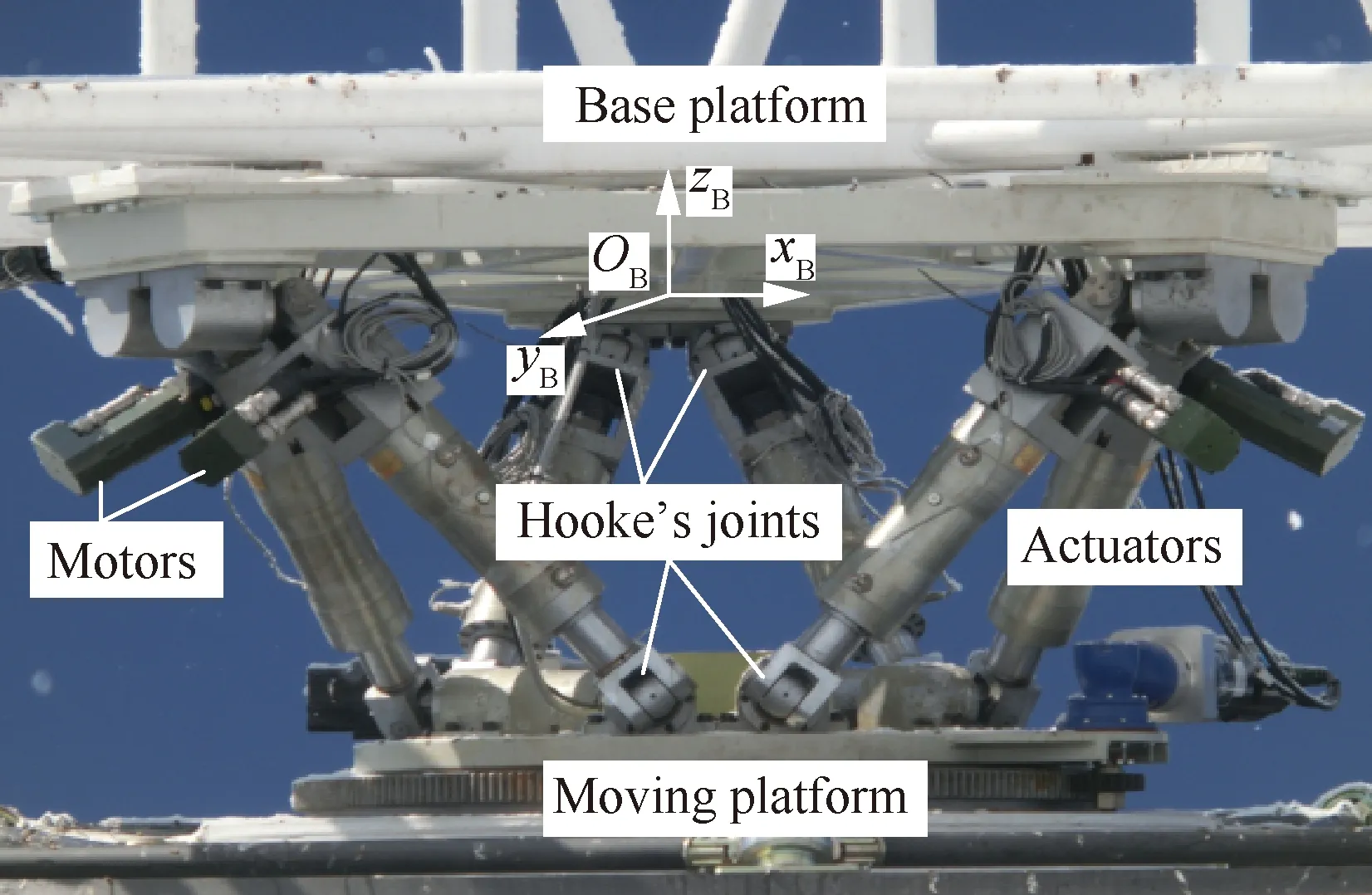
圖2 NSRT副面Stewart并聯機構
2 誤差建模
并聯機構位置姿態的高精度控制是實現精確運動調節的前提。機構末端的實際位姿與理論位姿之間的偏差,稱為系統的位姿誤差。對平臺進行精度分析時,需要對誤差源及其影響進行分析,建立誤差模型,對影響較大的誤差源進行補償。
對并聯機構進行誤差分析時主要考慮機構本身因素的誤差影響,包括幾何誤差和回零誤差。幾何誤差包括動、定平臺上的鉸鏈誤差及六分支桿桿長誤差。回零誤差主要指回零操作過程中,由增量式編碼器與限位開關相結合的回零檢測裝置反饋信號的異常,造成并聯機構零點位姿的偏差。
2.1 幾何誤差建模

(1)
式中:c11=cosαcosβ;c12=cosαsinβsinγ-sinαcosγ;c13=cosαsinβcosγ+sinαsinγ;c21=sinαcosβ;c22=sinαsinβsinγ+cosαcosγ;c23=sinαsinβcosγ-cosαsinγ;c31=-sinβ;c32=cosβsinγ;c33=cosβcosγ。
對于閉環矢量OB-bi-pi-OP-OB有:
(2)

(3)
(4)
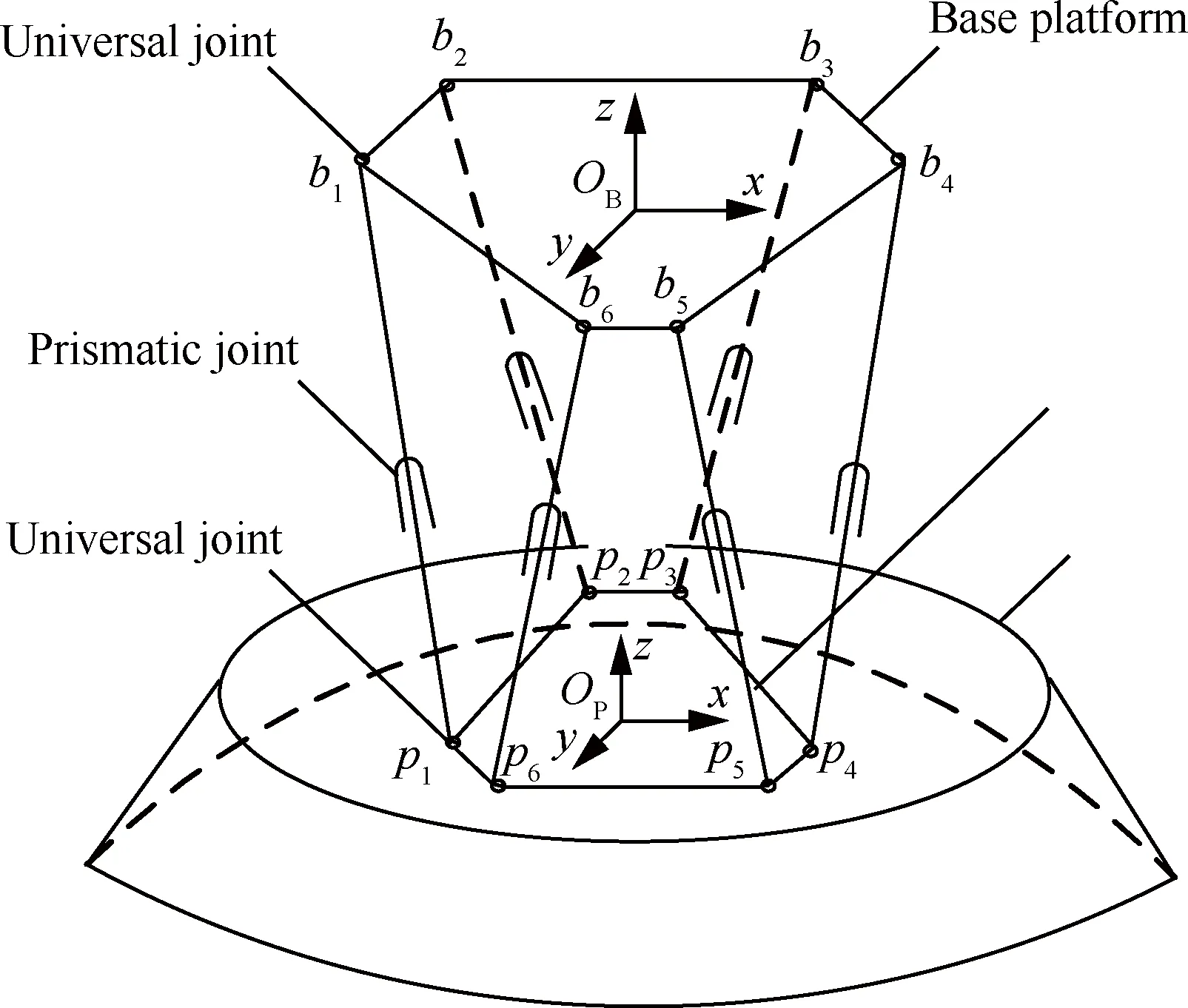
圖3 并聯機構坐標系統
式(4)簡化成矩陣形式為
(5)

Δl=JPΔe+JCΔd
(6)

(7)
JC=
(8)
在并聯機構的工作空間內JP是可逆的,因此并聯機構的位姿誤差為
(9)
2.2 回零誤差建模
NSRT副面并聯機構的電機采用增量式編碼器進行電機轉角指示。由于增量式編碼器不能提供絕對位置,因此需要通過回零找到預定義的參考位置。并聯機構的參考位置也稱零點,是機構各坐標預先指定的位置,該位置通常作為各坐標軸的原點,是機構運行的邏輯起點。NSRT副面并聯機構支腿的兩個極限位置裝有限位開關,支腿的零點是以限位開關為基準的相對位置,回零過程中的限位開關是機構回零信號的反饋裝置。因此,限位開關反饋信號的異常會導致并聯機構回零不準。此外,由初始安裝工藝水平造成的偏差及機械磨損引起的誤差累積也會造成零點位置的偏差。
一方面,由于采用增量式編碼器,控制過程中的反饋量是相對零點的增量式反饋,回零誤差無法通過控制補償,在機構工作過程中始終引起末端位姿的偏差。另一方面,由于采用增量式編碼器,機構斷電之后編碼器不會對原有坐標軸的位置進行自動記憶與保存,系統每次斷電前自動記錄當前動平臺指令位置,并以此作為下次上電后的實際位姿,然而由于指令位姿與實際位姿之間存在的誤差會隨著重新上電次數的增加不斷累積,需要通過回零操作消除該累積誤差。因此,提高回零精度對系統精度的提高至關重要。
并聯機構執行回零操作是通過控制每個支腿上的驅動關節回到零點來完成末端動平臺的回零,因此并聯機構回零誤差模型為
(10)
具體形式為
(11)

雖然回零誤差及桿長誤差都是通過桿長影響末端位姿,數學上回零誤差模型和桿長誤差模型是等效的,但實際工作過程中回零誤差和桿長誤差產生的原理不同,引起的末端位姿誤差分布不同。回零誤差是回零操作過程中產生的零點位姿的偏差,回零操作的目的是重新確立參考點與坐標軸的位置,能夠使各項控制操作任務重新回到零點坐標,為后續的工作提供一個基準點,一旦這個基準點有偏移,將引起后續所有的工作點的偏差。而桿長誤差受滾珠螺旋副傳動誤差的影響,對末端位姿的影響與驅動桿的行程相關,隨桿長的變化在一定范圍內變化。
3 實驗研究及結果分析
為了分析影響 NSRT副面并聯機構的誤差源,分別對并聯機構進行了仿真實驗和實際測量實驗。通過仿真實驗分析了桿長誤差、鉸鏈誤差及回零誤差對并聯機構末端位姿的影響。實際測量用激光跟蹤儀獲得了NSRT副面并聯機構末端動平臺的運動精度。將實際測量結果與仿真結果進行分析比較,確認了影響并聯機構末端位姿的主要誤差源。
3.1 幾何誤差模擬
本節對并聯機構的桿長誤差和鉸鏈誤差對末端位姿的影響進行仿真分析。首先對桿長誤差、鉸鏈誤差進行隨機抽樣模型的構建,再將誤差隨機量帶入誤差模型得到最終結果。
1) 支腿桿長誤差隨機量抽樣
桿長誤差主要由滾珠螺旋副的傳動誤差、受力變形誤差及加工誤差引起;傳動誤差主要源于滾珠絲杠副的軸向間隙及螺距累積誤差。對NSRT副面并聯機構來說,在出廠時電動缸的精度小于0.01 mm,運動范圍不大。安裝3年以來運動次數約為700 次(平均1.5天換一次饋源),估算并聯機構整個傳動部分的間隙小于0.04 mm,且并聯機構工作時基本承受單向載荷,因此基本可以忽略傳動間隙的影響,僅需考慮螺桿的螺距累積誤差。此處假設支腿桿長偏差在公差T帶內服從零均值正態分布,且相互獨立。按照3σ原則,支腿桿長誤差的標準差為
(12)
至此,可按正態分布抽樣公式得到驅動桿桿長誤差的模擬值:
(13)
式中:z1i和z2i為 (0,1) 間的偽隨機數。
2) 鉸鏈誤差隨機量抽樣
鉸鏈誤差主要有動、定平臺鉸鏈空間安裝位置誤差和鉸鏈制造誤差引起的鉸鏈中心位置誤差及鉸鏈間隙誤差。NSRT副面并聯機構采用雙端虎克鉸式并聯機構,而虎克鉸存在2個垂直方向的軸承(圖4中的軸1和軸2)間隙誤差,分別為軸孔與軸配合時存在的間隙。因此,鉸鏈中心位置誤差及鉸鏈間隙誤差的隨機抽樣模型為
(14)
式中:ω、γ在 [0,π] 內均勻分布,θ、φ在 [0,2π] 內均勻分布,且ω、γ、θ、φ相互獨立;h為軸承間隙。
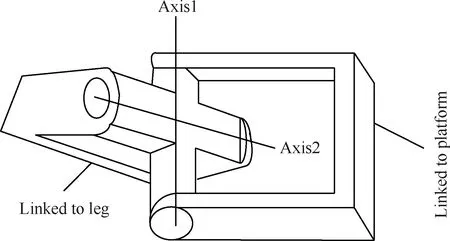
圖4 虎克鉸結構
3) 仿真實驗
動、定平臺鉸鏈分布如圖5所示。定平臺鉸鏈分布圓半徑R=600 mm,動平臺鉸鏈分布圓半徑r=358 mm, 初始位置動、定坐標系原點之間的距離為733 mm。

圖5 NSRT副面并聯機構鉸鏈分布(單位:mm)
根據副面并聯機構的結構參數,定量分析桿長誤差和鉸鏈誤差對并聯機構末端位姿的影響。假設分支桿桿長公差T=0.1 mm,鉸鏈誤差h=0.1 mm,樣本容量為300,對并聯機構末端位姿誤差進行統計模擬。
模擬結果如圖6~圖8所示,受支腿桿長誤差的影響,并聯機構的位置誤差為0.03 ~0.08 mm,為支腿桿長誤差的3/10~8/10;受鉸鏈誤差的影響,并聯機構位置誤差為0.06~0.12 mm,為鉸鏈誤差的6/10~12/10;共同作用時并聯機構的位置綜合誤差為0.06~0.15 mm。通過在整個工作空間上搜索并聯機構末端位姿誤差可知,如果保證桿長誤差小于0.08 mm,鉸鏈誤差小于0.05 mm,即可保證并聯機構在精度要求范圍內。

圖6 只考慮桿長誤差對Stewart并聯機構位置誤差的影響(z=733 mm)

圖7 只考慮虎克鉸鏈誤差對Stewart并聯機構位置誤差的影響(z=733 mm)

圖8 考慮桿長誤差和虎克鉸鏈誤差對Stewart并聯機構位置誤差的影響(z=733 mm)
3.2 回零誤差模擬
為了研究支腿的回零誤差對末端回零位姿的影響,這里給每個支腿施加從±0.05~±0.1 mm 各個區間內均勻分布的回零誤差,每個區間內分別實現回零操作1 000次。表1為針對給定的支腿回零誤差下并聯機構末端位置分布球半徑及球內點占的百分比。以工況3為例,當每個支腿存在±0.07 mm均勻分布的回零誤差時,并聯機構末端位置有90.3% 的點落在半徑為0.225 mm 的球內,相對應地并聯機構的零點在空間的分布如圖9所示。
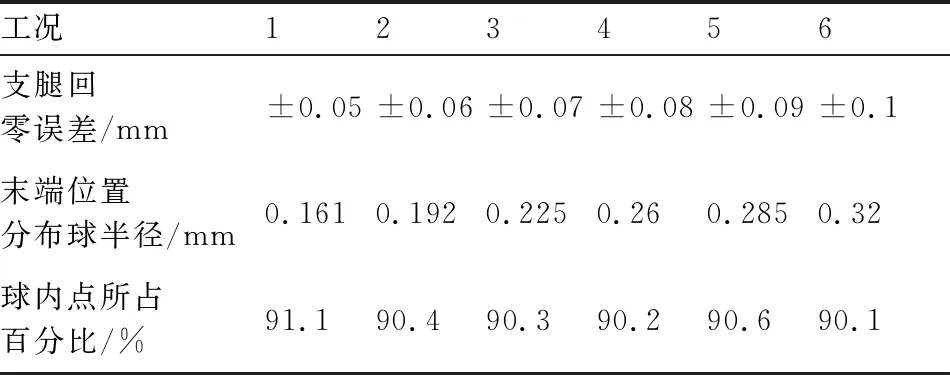
表1 回零重復精度
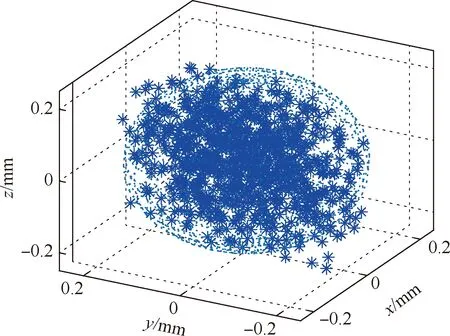
圖9 工況 3 零點位置分布
3.3 實際測量實驗
為了測量NSRT副面并聯機構的運動精度,利用Leica激光跟蹤儀測量NSRT副面的運動軌跡。如圖10所示,將角反射鏡(靶球)放置于副面,激光跟蹤儀安置于饋源倉頂部。已知NSRT副面與饋源倉頂部的距離約為7 m,且儀器精度5 μm +5 ppm,測量精度約為0.05 mm。
為了測量并聯機構的回零精度,進行了23次回零操作,并記錄了零點坐標。結果如圖11所示,零點位置重復精度約為0.29 mm,90%的零點在半徑為0.2 mm的球體內離散分布,分布呈現無規律特征。

圖10 NSRT副面定位精度實測實驗

圖11 實測零點位置分布
為了測量并聯機構的重復定位精度,使并聯機構沿著某一坐標軸的方向來回運行。首先,使并聯機構沿z軸方向運行,從零點開始以10 mm 的步進長度運動到+50 mm處;其次,再從+50 mm處運動到-50 mm處;最后,再從-50 mm回到零點位置。x、y坐標方向對應誤差結果如圖12所示。可以發現沿z軸方向運行時,x、y方向都有不同程度的偏移,且行程越長偏差越大。
同樣使并聯機構分別沿x、y方向運行,從零點開始以10 mm步長分別從原點運動到+40 mm處,再從+40 mm處分別運動到-40 mm處,最后從-40 mm回到零位置。圖13為并聯機構沿x軸方向運動時z、y坐標方向對應誤差,受環境因素的影響,數據出現抖動,但不影響整體趨勢。圖14為并聯機構沿y軸方向運動時x、z坐標方向對應誤差。可以發現單坐標方向運行時,其他兩個坐標方向有不同程度的偏移,且行程越長偏差越大。
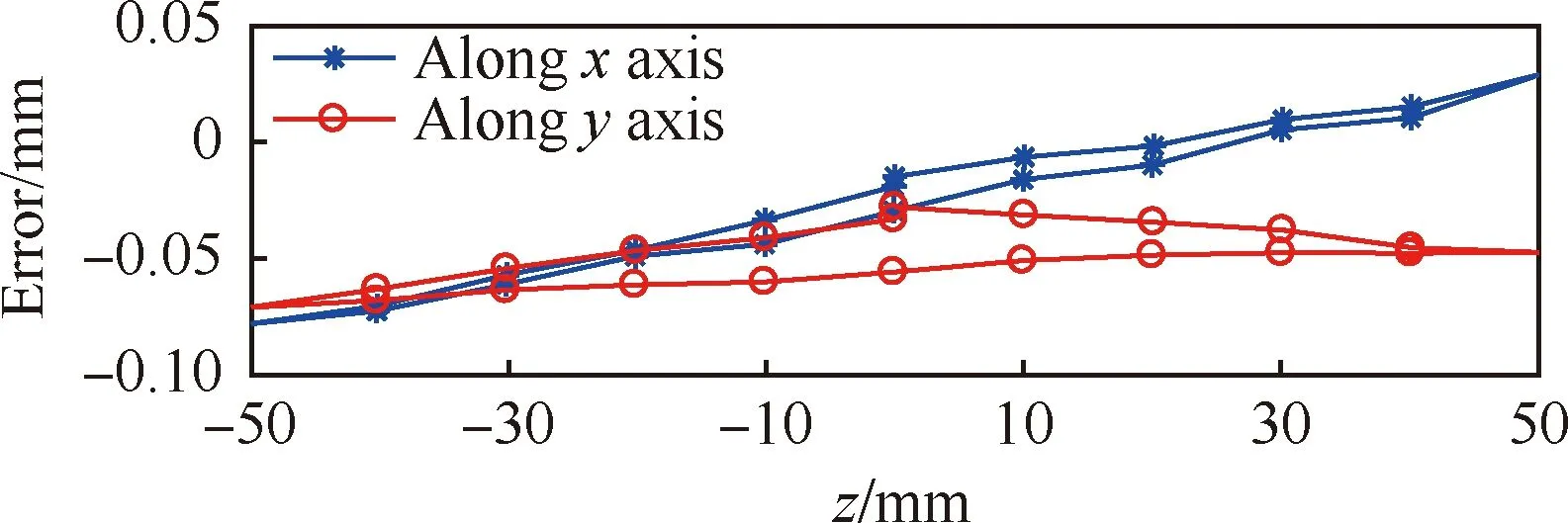
圖12 沿 z 軸方向運動時 x、y 坐標方向對應誤差
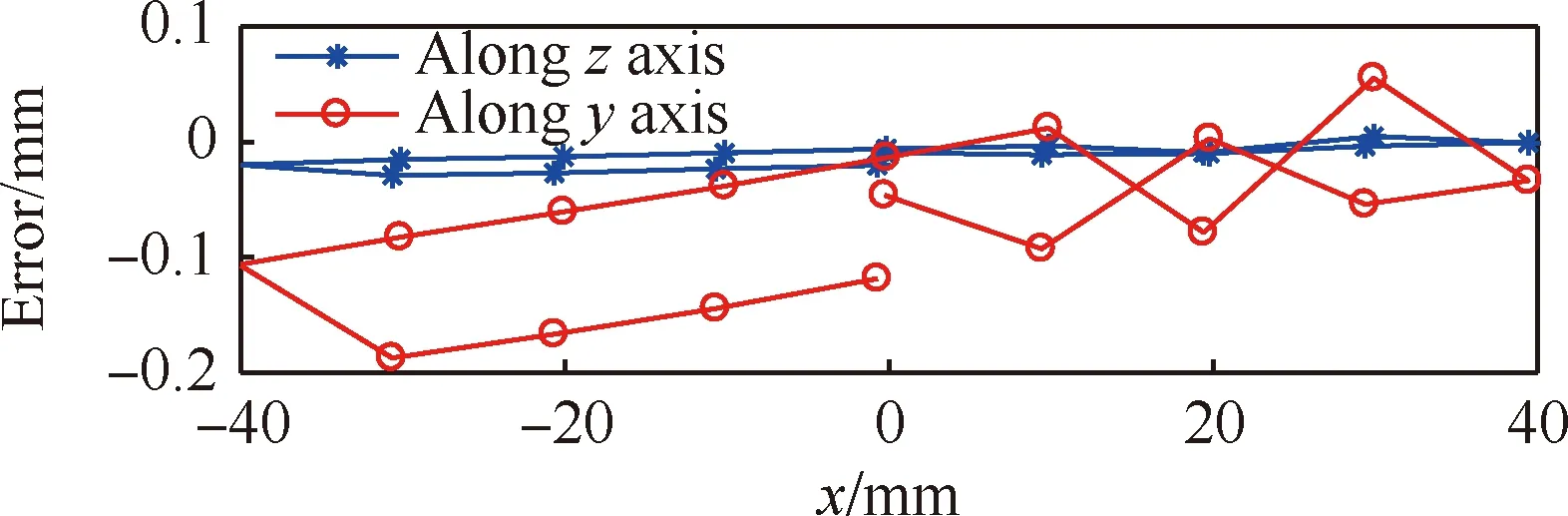
圖13 沿x軸方向運動時 z、y 坐標方向對應誤差
最后測量并聯機構實際工作位置的定位精度,使并聯機構分別運行至四個波段對應位置,每個位置點重復運行5次(每次先執行回零操作再分別運行到四個波段對應的位置),測量每個點對應的坐標。測量結果如圖15所示,各點離散分布,重復精度平均偏差為0.26 mm。
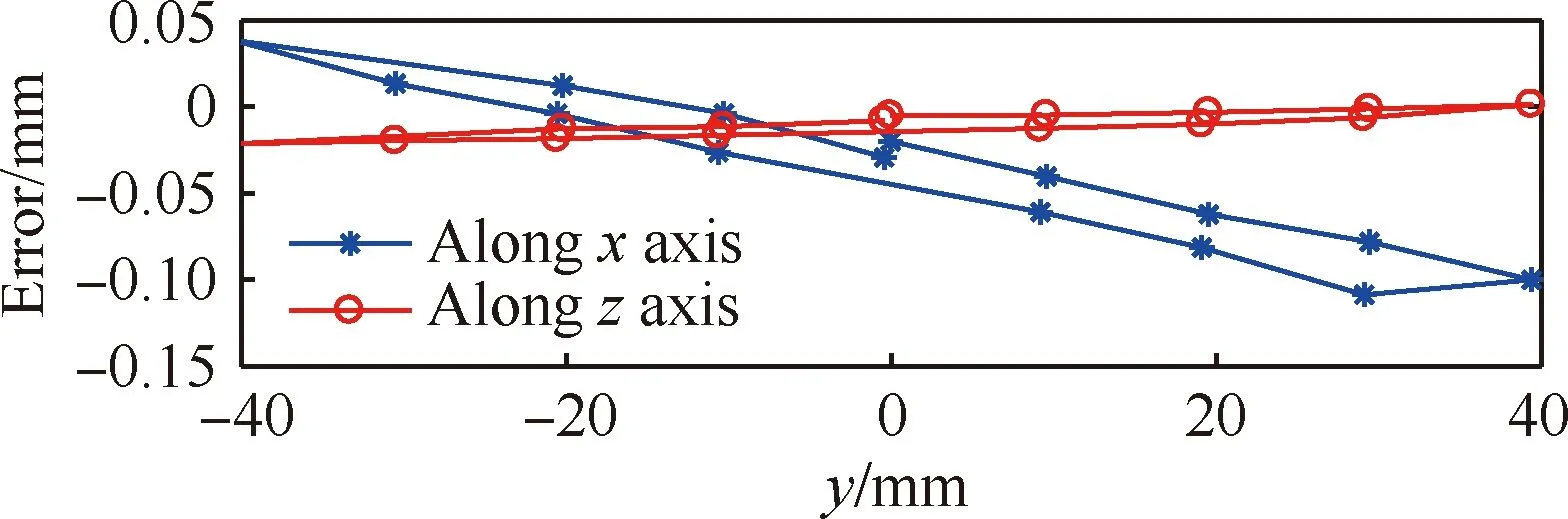
圖14 沿 y 軸方向運動時 x、z 坐標方向對應誤差

圖15 四波段重復定位精度
3.4 結果分析
幾何誤差模擬結果顯示,如果保證桿長誤差小于0.08 mm,鉸鏈誤差小于0.05 mm,則并聯機構精度保持在要求范圍內。
回零精度實測結果顯示,零點位置重復精度約為0.29 mm,遠大于0.07 mm的設計指標,90%的零點在半徑為0.2 mm的球體內離散分布,分布呈現無規律特征。導致并聯機構在其他運動過程中因基準不對而造成偏差。分別對影響零點位置重復精度的各個因素進行分析并確定主要誤差源。
并聯機構末端姿態為零時工作空間內同一z截面上,鉸鏈間隙對位置精度影響基本相同[25]。本例中,在進行反復回零操作時終端姿態為零且在同一z截面上,因此鉸鏈間隙誤差不影響重復精度。鉸鏈中心位置偏差對同一末端位姿精度影響相同。因此,可以排除鉸鏈誤差的影響。
在反復進行回零操作時,理論上桿長無變化,因此可以忽略滾珠螺旋副的傳動誤差,而驅動桿的加工誤差及桿件受力變形誤差在零點位置造成的誤差是確定值,不會影響重復精度。因此,可以排除桿長誤差的影響。
NSRT副面并聯機構支腿的兩個極限位置裝有限位開關,支腿的零點是以限位開關為基準的相對位置。因并聯機構的回零檢測裝置主要由增量式編碼器與限位開關組成,執行回零操作時,限位開關反饋信號的異常,會造成并聯機構的回零誤差,從而影響零點位置的重復精度。
綜上,可以確定影響并聯機構零點位置重復精度的主要因素是回零誤差。由表1所示仿真結果可知,當每個支腿存在±0.06 mm內均勻分布的回零誤差時,并聯機構末端位置落在半徑為0.192 mm 的球體內;存在±0.07 mm內均勻分布的回零誤差時,并聯機構末端位置落在半徑為0.225 mm的球體內。因此,NSRT副面并聯機構的支腿可能存在±0.06~±0.07 mm的回零誤差,使并聯機構零點在半徑為0.2 mm的球體內離散分布。
重復定位精度實測結果顯示,單坐標方向運行時,其他兩個坐標方向有不同程度的偏移,且行程越長偏差越大。由于并聯機構的結構特性,動平臺上x、y、z軸之間存在耦合關系。因此,單坐標方向運行時,除該測量軸以外的兩個坐標軸方向上均存在耦合誤差。此外,結構參數誤差及螺距累積誤差等因素會使得并聯機構出現行程越長偏差越大的現象。
NSRT進行四個波段觀測時并聯機構對應重復位置精度偏差平均為0.26 mm。由于每次運行到4個波段對應位置前進行回零操作,而回零操作為后續的工作提供一個基準點,回零誤差會引起這個基準點的偏移從而造成后續所有的工作點的偏差。綜合分析,回零誤差是造成并聯機構工作偏差的主要原因。
4 結 論
1) 通過對幾何誤差進行模擬,得出為使并聯機構精度保持在要求范圍內,桿長誤差應小于0.08 mm, 鉸鏈誤差應小于0.05 mm。
2) 通過分析比較實測結果與仿真結果,得出影響并聯機構末端位姿精度的主要誤差源是回零誤差,支腿可能存在±0.06~±0.07 mm的回零誤差。
3) 通過本文的實際測量與仿真分析可知,對射電望遠鏡這種高精度設備,以增量式編碼器與限位開關相結合作為回零檢測裝置和反饋模塊,長期工作后易造成并聯機構運動精度下降的問題。
4) 設計高精度并聯機構時應避免使用增量式編碼器與限位開關相結合的回零檢測裝置和反饋模塊,或者設計高精度的回零方式及回零控制策略。NSRT副面并聯機構后續誤差補償工作將主要針對回零誤差進行,具體為將增量式反饋元件換成絕對位置反饋元件,采用絕對位置控制方式。