基于共模電壓抑制的六相電機空間矢量調制*
2020-06-10 02:03:22張志鋒葉思聰
沈陽工業大學學報 2020年1期
關鍵詞:方法
張志鋒,葉思聰
(沈陽工業大學 電氣工程學院,沈陽 110870)
近年來,多相永磁電機因其具有低壓大功率輸出,轉矩脈動小,系統動、靜態性能優秀,可靠性和容錯性高等特點備受關注[1-3].雙Y移30°六相電機是多相電機應用較多的一種,具有良好的發展前景.
雙Y移30°六相電機的定子有兩套中性點相互獨立的三相星形繞組,互相之間相差30°.由于電機的交流調速系統普遍采用PWM脈寬調制技術,這會導致共模電壓的產生,該共模電壓可以用定子繞組的中性點與逆變器直流母線中點之間的電壓來衡量[4].在寄生電容的作用下,共模電壓會成為電磁干擾和軸電壓的重要來源,可能使軸承油膜擊穿形成軸電流,導致電機軸承損壞.抑制共模電壓的方法主要集中于電機結構的設計,逆變器結構的改善,調制算法的優化以及采用有源、無源濾波器濾波[5-9].此類方法雖然能在一定程度上抑制共模電壓,但是效果欠佳,局限性比較大.而采用合成中間矢量的辦法抑制共模電壓會帶來電力電子器件開關頻率過高,直流母線電壓利用率過低等問題.
為此,本文對雙Y移30°六相電機共模電壓進行分析,提出一種新型抑制共模電壓的空間矢量調制方法,既能抑制共模電壓的峰值大小和變化頻率,又具有良好的電流、轉矩和轉速性能,同時保證了較高的直流母線電壓利用率和較低的電力電子器件開關頻率,并進一步通過仿真驗證其性能.
1 六相電機的VSD變換與共模電壓
雙Y移30°六相電機與兩電平電壓型逆變器組成的系統如圖1所示,其中第一套繞組(ABC繞組)與第二套繞組(DEF繞組)相差30°,中性點(N,N′)相互獨立且與逆變器直流母線側中點g相互獨立.繞組中性點與直流母線中點之間的電壓UNg與UN′g即為共模電壓,其表達式為
(1)
逆變器共有六個橋臂,每個橋臂的上下兩個開關器件都工作在互補導通狀態,故每個橋臂有兩個工作狀態,整個逆變器有26=64個開關狀態.通過空間矢量解耦變換[10],與轉換開關相對應的64種基本電壓矢量表示為
(2)
式中:Uαβ、Uz1z2、Uo1o2分別為電壓矢量在三個相互正交的子平面內的分量;α=ej30°;s為每個橋臂的開關狀態,s=1為上橋臂導通,s=0為下橋臂導通.另外,式(2)還可以變換為
(3)
式中,*為共軛.這樣就可以將這64種狀態映射到三個相互正交的子平面,即α-β子平面(含有基波分量以及12k±1次諧波分量,k=1,2,3,…),z1-z2子平面(含有6k±1次諧波分量,k=1,3,5,…)以及o1-o2子平面(含有6k±3次諧波分量,k=1,3,5,…).α-β子平面和z1-z2子平面的基本電壓矢量分布如圖2所示,矢量的編號為八進制數,對應二進制的六個橋臂開關狀態,1為上橋臂導通,0為下橋臂導通,順序為ABCDEF.其中矢量00,07,70,77在所有子平面均為零矢量.
根據式(1)可以計算出各個基本電壓矢量的共模電壓UNg與UN′g,并根據數值將其分類,具體情況如表1所示.當某一組橋臂處于零功率狀態時,共模電壓峰值都會很大,所以應避免使用這些電壓矢量尤其是四個零矢量.而用其他電壓矢量合成零矢量并利用傳統控制方法控制時,不可避免地會使電力電子器件的開關頻率激增,這很不利.

圖2 基本電壓矢量分布
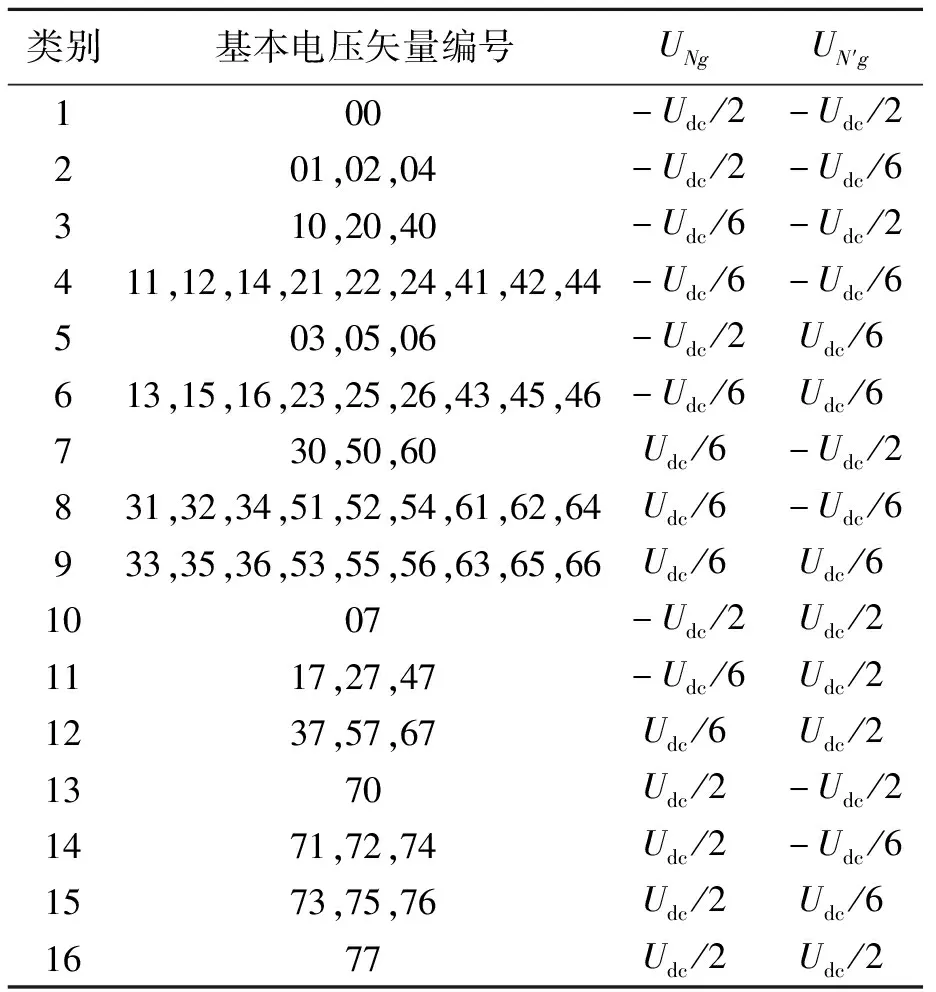
表1 各基本電壓矢量共模電壓幅值
本文通過三相解耦算法將六相電壓源逆變器的電壓矢量分解到兩個三相電壓源逆變器中,再利用無零矢量PWM調制分別合成新型調制方法.此方法既能有效降低共模電壓的幅值和變化頻率,也具有良好的電流、轉矩和轉速性能.
2 三相解耦算法及無零矢量調制
2.1 三相解耦算法
三相解耦PWM算法[11]將六相電壓源逆變器的電壓矢量分解成兩個三相電壓源逆變器中的電壓矢量,然后用三相電機的控制方法進行控制.
六相逆變器可以看成由兩個三相逆變器1和2組成,開關狀態對應關系為
(4)

(5)
(6)
把式(4)~(6)代入式(2)中,經過變換,六相逆變器中的基本電壓矢量和兩組三相逆變器電壓矢量間的關系表示為
(7)
(8)
由于中性點獨立,不會有零序電流產生,可以忽略零序分量.兩個三相逆變器輸出的參考電壓矢量U1ref和U2ref可以替代由六相逆變器輸出的α-β子平面和z1-z2子平面參考電壓矢量Uαβref和Uz1z2ref,即
(9)
由于z1-z2子平面的電流只有諧波分量,不會產生電磁轉矩,所以需要z1-z2子平面參考電壓矢量為0,兩個三相逆變器輸出的參考電壓矢量U1ref和U2ref為
(10)
兩個三相逆變器輸出參考電壓矢量之間的關系如圖3所示.

圖3 兩個三相逆變器的參考電壓矢量
2.2 三相解耦控制方法的電壓利用率
三相空間矢量控制方法的直流電壓利用率取決于基本電壓矢量六邊形的內切圓半徑,輸出的電壓極限約為0.577Udc,三相解耦控制方法的兩個三相逆變器也遵循此原理.兩個三相逆變器輸出的電壓極限如圖4所示,兩個基本電壓矢量六邊形大小相同,中心重合,故內切圓半徑也相同,所以此方法輸出的電壓極限為0.577Udc,電壓利用率與傳統的四矢量空間矢量調制方法相同.
2.3 三相無零矢量PWM調制方法
三相電機的空間矢量控制無論是采用七段式還是五段式算法,都要使用兩個相鄰的基本電壓矢量和零矢量,故共模電壓峰值很大,如圖5a所示.本文采用相對基本電壓矢量合成零矢量的方法取代零矢量[12],為降低電力電子器件的開關頻率,使用兩個相鄰的基本電壓矢量中的一個及其相對的基本電壓矢量,如圖5b所示.

圖4 兩個三相逆變器輸出的電壓極限

圖5 兩種空間矢量調制方法對比
本文采用調制方法的伏秒平衡方程為
(11)
選用的基本電壓矢量幅值相等,方向相反,在合成零矢量時,把需要的零矢量作用時間T0平均分配給相對的基本電壓矢量,由此可以求得各基本電壓矢量作用時間,即
(12)
然后采用五段式調制方法,基本電壓矢量的作用順序為U4→U6→U3→U6→U4,這樣可以實現PWM波形的對稱,減少諧波.
3 仿真研究
為了驗證所提方法的正確性和有效性,在Simulink環境下建立了雙Y移30°六相永磁同步電機系統的仿真模型.仿真模型中,逆變器直流母線電壓為400 V,PWM開關周期為0.000 1 s,電機模型參數為:極對數為3,轉動慣量為0.015 kg·m2,定子電阻為1.4 Ω,定子直軸電感為8.8 mH,定子交軸電感為8.8 mH,定子漏感為2.9 mH,轉子磁鏈為0.68 Wb,負載轉矩初始值為20 N·m.在0.2 s時,負載轉矩變為50 N·m,在0.4 s時,負載轉矩變為30 N·m,電機轉速的參考值為500 r/min.
圖6為兩種調制方法產生的共模電壓仿真結果.圖6a為四矢量SVPWM調制方法ABC相繞組結點共模電壓的變化情況,在0.000 5 s內變化了40次且峰值為±200 V;圖6b為新型抑制共模電壓SVPWM調制方法ABC相繞組結點共模電壓的變化情況,在0.000 5 s內變化了8次且峰值為±66 V.可以看出,相較于四矢量SVPWM調制方法,抑制共模電壓SVPWM調制方法所產生的共模電壓峰值降低了2/3,而變化頻率也顯著降低.

圖6 兩種調制方法下的共模電壓變化情況
圖7為兩種調制方法產生的定子相電流仿真圖.圖7a為四矢量SVPWM調制方法A相電流波形;圖7b為抑制共模電壓SVPWM調制方法A相電流波形.相較于四矢量SVPWM調制方法,抑制共模電壓SVPWM調制方法產生的電流諧波含量較高,經FFT分析此結論得到驗證.負載轉矩為50 N·m時,四矢量SVPWM調制方法的相電流諧波含量為THD=3.40%,如圖8a所示;抑制共模電壓SVPWM調制方法的相電流諧波含量為THD=6.17%,如圖8b所示.

圖7 兩種調制方法下相電流波形
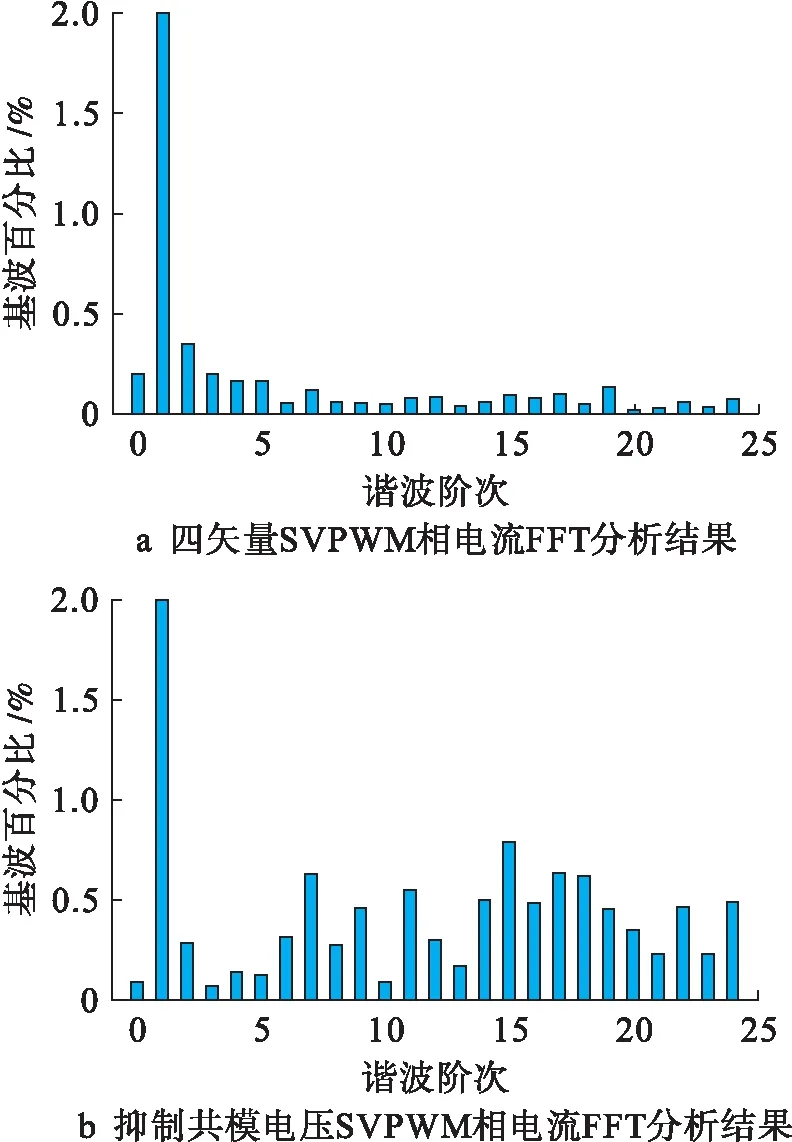
圖8 兩種調制方法下相電流FFT分析結果
圖9為兩種調制方法電磁轉矩的仿真曲線.可以看出,相較于四矢量SVPWM調制方法,抑制共模電壓SVPWM調制方法下的電磁轉矩波動稍大,印證了FFT分析中抑制共模電壓SVPWM調制方法電流諧波含量高的結論.

圖9 兩種調制方法下轉矩曲線
4 結 論
本文以雙Y移30°六相電機與兩電平六橋臂電壓源型逆變器組成的系統為對象,分析該系統共模電壓的起因及特點.通過三相解耦的方式將電壓矢量分解到兩個三相逆變器中,并通過無零矢量合成的方式得到一種新的空間矢量調制方法,然后利用Simulink環境對該方法進行了仿真.仿真結果表明,該方法可以明顯降低雙Y移30°六相電機共模電壓的幅值和頻率,并且轉矩性能、相電流正弦度與傳統四矢量空間矢量調制方法近似,達到了設計目的.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
