車車通信系統(tǒng)中車地控制機(jī)理分析及驗證
2020-06-14 06:36:02馮浩楠
科學(xué)技術(shù)與工程 2020年13期
關(guān)鍵詞:系統(tǒng)
馮浩楠
(中國鐵道科學(xué)研究院集團(tuán)有限公司通信信號研究所,北京 100081;2.國家鐵路智能運(yùn)輸系統(tǒng)工程技術(shù)研究中心,北京 100081)
基于通信的列車控制系統(tǒng)(communication based train control,CBTC)系統(tǒng)采用以地面控制系統(tǒng)為中心的控制模式:列控系統(tǒng)和地面控制系統(tǒng)之間的雙向無線通信,具有較高的列車間距控制效率[1],但由于地面控制系統(tǒng)仍然是控制中心,因此單個地面控制系統(tǒng)允許通信的列車數(shù)量受到限制;同時地面控制系統(tǒng)和列控系統(tǒng)之間復(fù)雜的控制流程制約了列車運(yùn)行速度提升。為了克服這些限制,車車通信(vehicle based train control, VBTC)系統(tǒng)提出以列車為控制中心的架構(gòu)方式[2],取消了CBTC系統(tǒng)中地面控制系統(tǒng)中的計算機(jī)聯(lián)鎖(computer interlocking, CI)和區(qū)域控制器(zone controller, ZC)控制系統(tǒng),增加對象控制器(object controller, OC)用于控制軌旁道岔(point machine, PM)。列車不需要依靠地面控制系統(tǒng)的控制命令,可通過無線通信直接與周圍列車或者軌旁設(shè)備直接通信,實(shí)現(xiàn)列車的自主運(yùn)行,該架構(gòu)在提升列車運(yùn)行效率、擴(kuò)大列車運(yùn)能的同時,減少地面設(shè)施投資成本,與CBTC系統(tǒng)相比顯現(xiàn)優(yōu)勢[3-5],在實(shí)際應(yīng)用中,國外RCAS(railway collision avoidance system)系統(tǒng)[6], AATC(advanced automatic train control)系統(tǒng)[7]和Urbalis Fluence系統(tǒng)[8]遵循VBTC系統(tǒng)架構(gòu)進(jìn)行了初步的試驗和應(yīng)用探索。
VBTC系統(tǒng)按照控制對象包括車車通信控制和車地通信控制兩方面。在車地通信控制方面,VBTC系統(tǒng)取消保證進(jìn)路安全的地面聯(lián)鎖系統(tǒng)后,列車直接與OC通信進(jìn)而控制PM,OC作為車地控制流程中的重要環(huán)節(jié),其安全可靠的設(shè)計關(guān)系到行車安全。文獻(xiàn)[9-10]給出了OC設(shè)計方案,文獻(xiàn)[11]提出共享鎖和獨(dú)立鎖的方案對道岔進(jìn)行控制,但都是局限于列車與OC之間通信研究,交互場景不全面,缺少對VBTC系統(tǒng)整體車地控制流程的形式化分析,實(shí)用性有限。在實(shí)際運(yùn)行中,OC作為地面直接控制道岔的安全設(shè)備,正常情況下,需要與車載系統(tǒng)保持通信完成列車對道岔控制;在特殊情況下,OC還需要實(shí)現(xiàn)與自動列車監(jiān)控(automatic train supervision, ATS)系統(tǒng)進(jìn)行通信,完成指揮中心的人工道岔控制操作。如何保證OC能夠正確地處理兩個命令來源、安全可靠地完成道岔控制是VBTC系統(tǒng)車地控制流程急需解決的安全問題。
為了保證信號系統(tǒng)的安全性,EN50128 標(biāo)準(zhǔn)推薦形式化方法應(yīng)用于信號系統(tǒng)的設(shè)計與驗證環(huán)節(jié)[12]。標(biāo)簽轉(zhuǎn)移系統(tǒng)(label transition system, LTS)的形式化方法通過圖形方式描述系統(tǒng)內(nèi)部狀態(tài)轉(zhuǎn)換行為,進(jìn)而評估系統(tǒng)運(yùn)行控制流程,適用于實(shí)時并發(fā)系統(tǒng)的行為特征分析,在計算機(jī)安全平臺、RSSP-1協(xié)議和ERTMS/ETCS系統(tǒng)需求規(guī)范的安全屬性驗證中得到了良好的應(yīng)用,加速系統(tǒng)的開發(fā)和應(yīng)用進(jìn)程[13-15]。現(xiàn)提出唯一秘鑰的方式實(shí)現(xiàn)列車對地面道岔共享資源的控制,基于LTS形式化方法對OC信息交互處理機(jī)制和VBTC系統(tǒng)的車地控制機(jī)理進(jìn)行分析,驗證其邏輯的合理性和有效性。
1 VBTC系統(tǒng)
1.1 VBTC系統(tǒng)架構(gòu)
VBTC系統(tǒng)分為車載控制系統(tǒng)和地面控制系統(tǒng)。車載控制系統(tǒng)包括:列車自動保護(hù)(automatic train protection, ATP)系統(tǒng)、列車自動駕駛(automatic train operation, ATO)系統(tǒng)、車載聯(lián)鎖(on-board interlocking, OI)系統(tǒng)、應(yīng)答器讀取器(tag reader);地面控制系統(tǒng)包括:OC、PM、ATS系統(tǒng)和應(yīng)答器(tag)。數(shù)據(jù)通信系統(tǒng)(digital communication system, DCS)實(shí)現(xiàn)車地系統(tǒng)之間的通信功能,各個子系統(tǒng)的功能如表1所示。列車根據(jù)ATS系統(tǒng)命令前進(jìn),實(shí)時與地面OC通信,ATP系統(tǒng)負(fù)責(zé)列車行進(jìn)安全。OI將列車控制命令傳輸給OC。OC操作軌旁PM,并將PM的狀態(tài)信息傳送給OI,VBTC系統(tǒng)架構(gòu)如圖1所示。
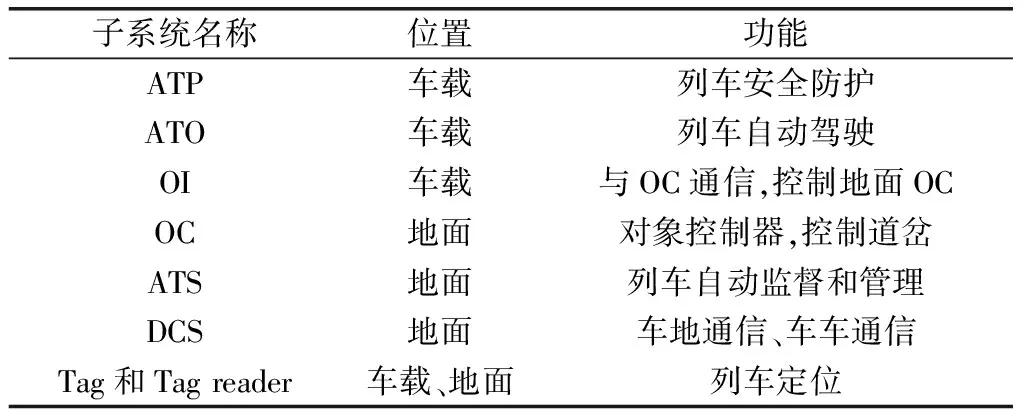
表1 VBTC系統(tǒng)控制子系統(tǒng)的位置及功能
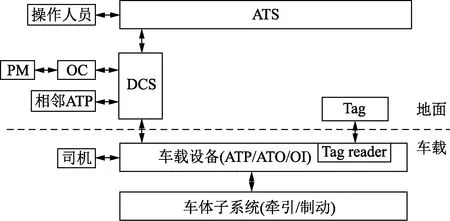
圖1 VBTC系統(tǒng)架構(gòu)
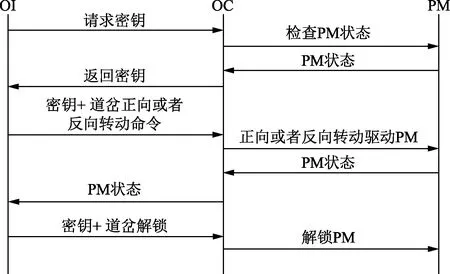
圖2 VBTC系統(tǒng)中車載設(shè)備與地面設(shè)備交互過程
1.2 車地控制機(jī)理
車地控制場景指列車行進(jìn)中,車載設(shè)備指示地面OC轉(zhuǎn)動道岔,為列車行進(jìn)辦理進(jìn)路。場景包括車載設(shè)備直接與軌旁O(shè)C進(jìn)行通信控制和ATS系統(tǒng)直接控制軌旁O(shè)C兩種情況。
1.2.1 車載控制PM場景
車載系統(tǒng)的OI定期與OC通信,OC向車載系統(tǒng)定期報告前進(jìn)進(jìn)路中所有PM的狀態(tài)。PM是共享資源,一次只能供一個列車占用。為了防止死鎖和控制權(quán)的沖突,車載系統(tǒng)的OI采用以下安全控制算法防護(hù)和控制進(jìn)路共享資源PM,流程如圖2所示。
(1)列車的OI確認(rèn)從OC接收的PM狀態(tài)處于空閑狀態(tài),發(fā)送密鑰的請求到OC。
(2)OC檢查PM的狀態(tài),如果PM資源可使用,然后生成唯一密鑰并將其發(fā)送到OI。
(3)OI使用密鑰將PM的轉(zhuǎn)換命令加密后發(fā)送到OC。
(4)OI確認(rèn)PM鎖閉,通過OC控制區(qū)域時,定期狀態(tài)仍保持與OC通信,直到列車完全通過OC控制區(qū)。
(5)列車完全離開OC控制區(qū)域,OI發(fā)送解鎖密鑰值傳輸?shù)絆C。
(6)OC收到OI的解鎖密鑰后,解鎖PM。
每次車載OI發(fā)出新的請求時,OC會生成新的唯一密鑰。密鑰是一個足夠長的值,防止密鑰沖突。如果特定PM收到來自多列列車的OI請求,OC僅為其中一個列車提供密鑰,不允多個列車同時占用。
圖3展示了列車通過由三個OC控制區(qū)域的場景。列車的ATP產(chǎn)生移動授權(quán)(move authority, MA)到X點(diǎn),列車前進(jìn)的進(jìn)路中包含的3個OC,標(biāo)識分別為1A、2和3。列車的OI訪問OC以確保標(biāo)識1A、2和3的PM處于安全鎖閉狀態(tài),同時獲得唯一的密鑰。如果有其他列車上的OI或者ATS系統(tǒng)已經(jīng)占用了某個PM,列車需要等待直到PM狀態(tài)被解除占用。列車在獲得唯一密鑰后將控制相應(yīng)的PM,并結(jié)合電子地圖信息,車載ATP計算出安全路線。基于安全路線,列車的ATP將MA擴(kuò)展到Y(jié)點(diǎn)。當(dāng)列車順序行駛過1A、2和3的OC控制區(qū)域后,會給相應(yīng)的OC發(fā)送解鎖命令,相應(yīng)的PM會按順序解鎖。
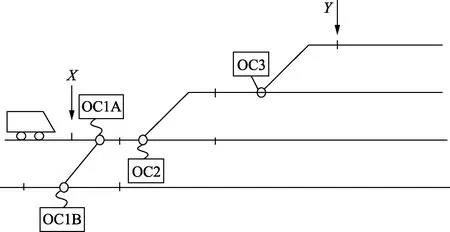
圖3 列車OI通過OC控制區(qū)域場景
1.2.2 ATS控制PM場景
如果操作員通過ATS系統(tǒng)直接向OC發(fā)送強(qiáng)制動作PM的命令請求,則該請求發(fā)送到路線上所有車輛的OI。如果待轉(zhuǎn)動的PM處在列車進(jìn)路中,需要結(jié)合列車位置判斷PM的轉(zhuǎn)動時機(jī)。當(dāng)列車的制動距離超過OC控制區(qū)域的1/4時,ATS系統(tǒng)的強(qiáng)性轉(zhuǎn)動PM操作可能發(fā)生脫軌,此時列車的OI拒絕ATS的PM操作請求,PM保持被列車OI控制的狀態(tài),直到列車通過OC控制區(qū),如圖4(a)所示。當(dāng)列車的制動距離不超過OC控制區(qū)域的1/4區(qū)域時,車載OI可以取消進(jìn)路并解鎖PM,將PM的控制權(quán)交給ATS系統(tǒng),如圖4(b)所示。列車ATP取消進(jìn)路后,列車的MA被縮短至PM前方,如圖4(c)所示。
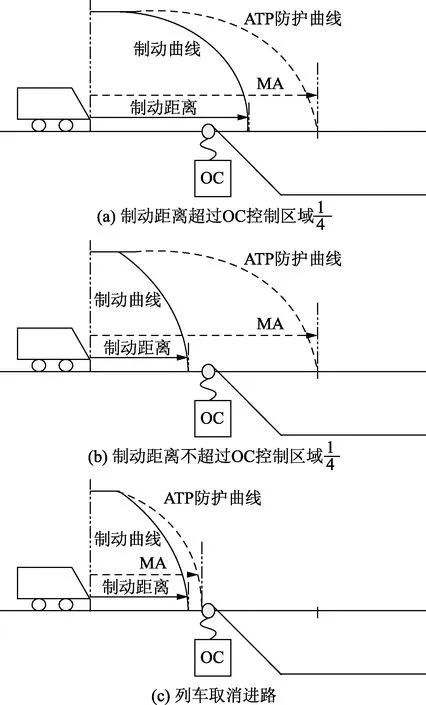
圖4 ATS操作OC場景
2 車地控制形式化建模
LTS將VBTC系統(tǒng)的車地控制行為描述為一系列過程P組成,過程P可以用四元素
由VBTC系統(tǒng)的控制PM的場景可以發(fā)現(xiàn),OC為整個控制流程的中樞,因此以O(shè)C為研究對象,建立標(biāo)簽集A如下:
A={ occhkreq,oikeyreq,atskeyreq,occhkpm,pmstlk,sndkey,oisndcmd,atssndcmd,ocsndcmd,pmrot,pmrest,chkatpst,atpok,atpno}
各個標(biāo)簽的含義如表2所示。LTS建模VBTC系統(tǒng)的車地控制狀態(tài)轉(zhuǎn)移流程S如下:Ti(i=1,2,…,10)為轉(zhuǎn)移分支。
S=T1,
T1=(occhkreq→oikeyreq→T2|
occhkreq→atskeyreq→T2),
T2=(occhkpm→T3|
occhkpm→T4),
T3=(pmstlk→sndlock→T1),
T4=(pmstunlk→sndkey→T5|
pmstunlk→sndkey→T6),
T5=(oisndcmd→T7),
T6=(atssndcmd→T8),
T7=(ocsndcmd→pmrot→pmrest→T8),
T8=(chkatpst→T9|
chkatpst→T10),
T9=(atpok→T7),
T10=(atpno→T3).
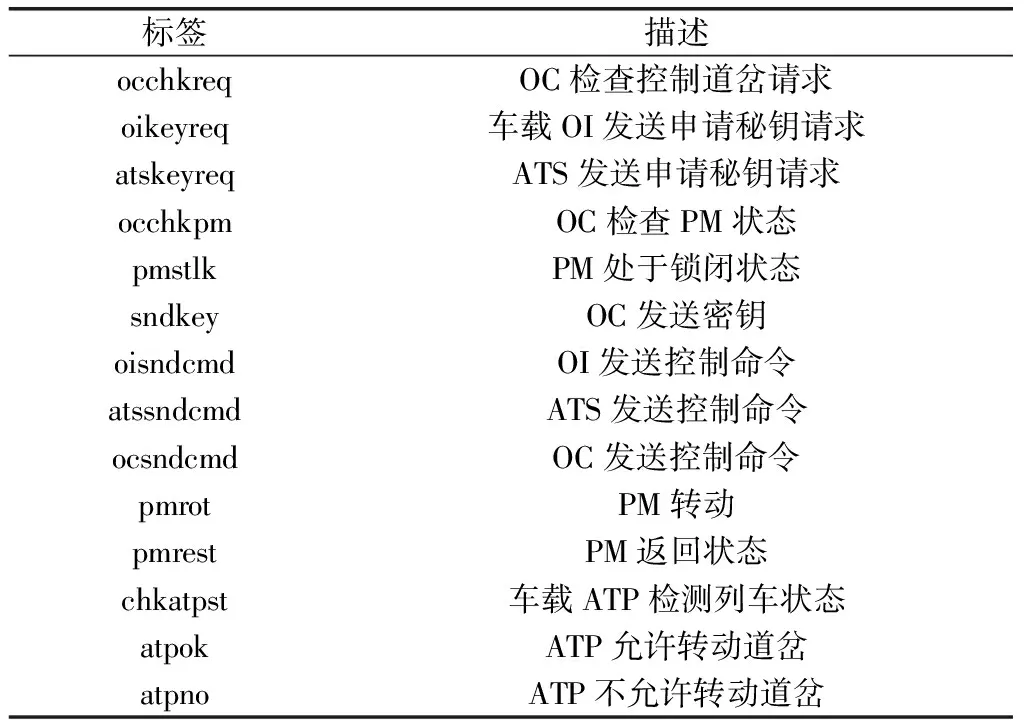
表2 VBTC系統(tǒng)車地控制流程的LTS模型
3 實(shí)驗分析
圖5為VBTC系統(tǒng)車地控制流程的LTS模型的標(biāo)簽轉(zhuǎn)移過程,VBTC系統(tǒng)的車地控制中存在17個轉(zhuǎn)移狀態(tài)。圖6為LTSA軟件對LTS模型的檢查結(jié)果,結(jié)果表明軟件對模型的分析時間為1 ms,模型中不存在死鎖現(xiàn)象,車地控制流程安全可靠。
為了驗證LTS方法建模的有效性,將其與人工檢查對車車通信系統(tǒng)的車地控制流程進(jìn)行分析,以流程死鎖檢查正確率,死鎖檢查時間為評價指標(biāo)進(jìn)行對比,對比如表3所示。
表3表明,LTS方法的死鎖檢查率為100%,且建模耗時較短,效率遠(yuǎn)高于人工檢查。因為LTS可以對并行邏輯可以精準(zhǔn)描述,而人工分析方法對并行行為會存在遺漏情況;LTS方法將控制流程采用符號集的方式直接轉(zhuǎn)換為形式化模型并進(jìn)行計算機(jī)運(yùn)算,實(shí)現(xiàn)速度很快,而人工測試方法在編寫案例測試方面花費(fèi)太多時間。
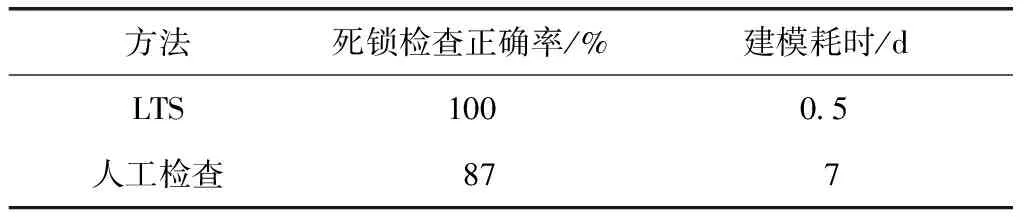
表3 LTS模型與人工檢查正確率對比
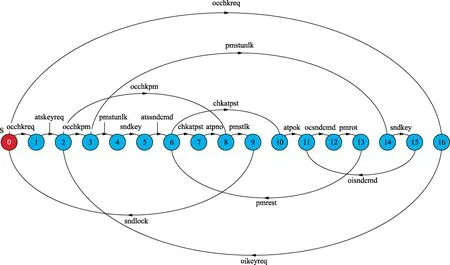
圖5 LTSA軟件對VBTC系統(tǒng)車地控制模型的驗證結(jié)果
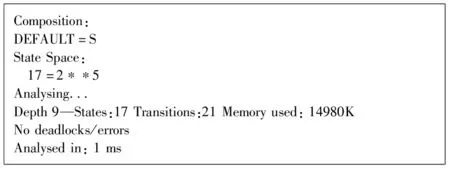
Composition:DEFAULT=SStateSpace: 17=2??5Analysing...Depth9—States:17Transitions:21Memoryused:14980KNodeadlocks/errorsAnalysedin:1ms
圖6 LTSA軟件檢測結(jié)果
Fig.6 Detection result by LTSA software
4 結(jié)論
作為一種新的控制系統(tǒng),VBTC系統(tǒng)為了實(shí)現(xiàn)以列車為控制中心的運(yùn)行方式,使用OC代替CBTC系統(tǒng)中的地面聯(lián)鎖系統(tǒng),全新的控制流程的改變引入了系統(tǒng)的安全風(fēng)險。使用唯一密鑰控制方式設(shè)計OC交互機(jī)制,實(shí)現(xiàn)列車對線路中道岔共享資源的控制。為了驗證設(shè)計的可靠性,基于LTS形式化方法對VBTC系統(tǒng)中的車地控制流程進(jìn)行了建模,并使用LTSA軟件對模型進(jìn)行了快速分析。結(jié)果驗證了設(shè)計的VBTC系統(tǒng)車地控制流程的正確性;與人工分析對比,LTS建模方法在準(zhǔn)確性和效率上存在明顯的優(yōu)勢,可以推廣至其他復(fù)雜控制系統(tǒng)的設(shè)計和驗證中。
僅對VBTC系統(tǒng)的OC和車地控制流程進(jìn)行了理論設(shè)計和驗證,后續(xù)將基于此設(shè)計,搭建VBTC系統(tǒng)實(shí)物系統(tǒng),基于VBTC系統(tǒng)車地通信實(shí)驗數(shù)據(jù),優(yōu)化配置VBTC系統(tǒng)中車載設(shè)備、OC等關(guān)鍵設(shè)備的通信參數(shù),實(shí)現(xiàn)VBTC系統(tǒng)的可靠運(yùn)行。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32