聲速修正技術在高精度水下定位系統(tǒng)中的應用
2020-06-15 06:13:06李海鵬韓云峰鄭翠娥
導航定位學報 2020年3期
關鍵詞:模型
李海鵬, 韓云峰,鄭翠娥
聲速修正技術在高精度水下定位系統(tǒng)中的應用
李海鵬1,2,3, 韓云峰1,2,3,鄭翠娥1,2,3
(1. 哈爾濱工程大學 水聲技術重點實驗室,哈爾濱 150001;2. 海洋信息獲取與安全工信部重點實驗室(哈爾濱工程大學),哈爾濱 150001;3. 哈爾濱工程大學 水聲工程學院,哈爾濱 150001)
為進一步研究聲速修正技術在水聲定位系統(tǒng)中的應用,提出1種利用聲速修正技術降低測速誤差改正的聲線跟蹤算法:分析超短基線定位的誤差來源;然后以基陣中心為參考,離線計算聲波從基陣中心到達作業(yè)區(qū)域所有位置的有效聲速,得到1個有效聲速表,保證了計算的準確性,提高了工作效率;最后進行模型誤差分析。結果表明:在聲線入射的幾何夾角較大的情況下,有效聲速法能夠在保持計算速度的同時,具有較高的精度;但是隨著幾何夾角的減小,有效聲速法的角度估計誤差逐漸增大,不再適用高精度的水聲定位。
超短基線;聲速修正;有效聲速;聲線追蹤
0 引言
隨著各國對海洋重視程度的不斷提高,水聲定位系統(tǒng)成為人類利用眾多水下航行器進入海洋、探測海洋、開發(fā)海洋的重要手段[1],在海洋資源勘察、環(huán)境監(jiān)測、海洋工程等領域扮演著越來越重要的作用。
水聲定位系統(tǒng)按基線長度分類,可分為:長基線定位系統(tǒng)、短基線定位系統(tǒng)和超短基線定位系統(tǒng)[2]。超短基線定位系統(tǒng)通過船載聲學基陣獲得目標位置,然后結合全球定位系統(tǒng)(global positioning system, GPS)接收機、姿態(tài)傳感器等外部設備進行坐標轉換,以獲得水下目標的大地坐標。超短基線定位系統(tǒng)具有組成簡單、操作方便、便于大范圍機動作業(yè)等優(yōu)點[3],可為水下勘探、水下目標定位跟蹤、水下遙控作業(yè)等各種高精度作業(yè)提供技術支持,在海洋資源調(diào)查和科學研究領域,發(fā)揮著越來越重要的作用。
聲速測量誤差是影響超短基線定位精度的主要原因。由于海水介質的非均勻特性,海水中的聲速隨溫度、鹽度和深度的變化而變化,使得聲波在海洋信道中傳播路徑是彎曲的。這意味著聲波的實際傳播距離要大于目標與接收基陣的幾何直線距離。通過固定的聲速進行定位解算必然會造成定位誤差,因此需要考慮聲速變化對定位解算的影響并進行修正。
文獻[4]提出聲線跟蹤概念,并對具有線性聲速梯度的介質中,聲線為圓弧作了理論論證。聲線跟蹤法能夠模擬聲波在水中的實際傳播軌跡,因此精度較高;但是由于對聲速剖面進行分層處理,因此計算量很大。為了簡化聲線跟蹤計算量大的問題,文獻[5]提出了等效聲速剖面法,用1個常梯度等效聲速剖面來代替復雜的實際聲速剖面,該方法雖然簡化了聲線跟蹤過程,但也由于簡化模型降低了計算精度。文獻[6]提出有效聲速法的概念,重新定義了聲速修正模型中的聲速,將水中任意2點間的有效聲速,定位為2點之間的幾何距離與聲傳播時間的比值。文獻[7]提出了1種用于超短基線定位的基于有效聲速表的聲速修正算法,并通過外場實驗進行了驗證,該方法首先通過聲線跟蹤法離線計算作業(yè)區(qū)域所有位置的有效聲速,將計算結果構成1個有效聲速表,實際作業(yè)時只需要根據(jù)深度調(diào)用即可,該方法同時保證了計算精度和速度。遺憾的是,文獻[7]沒有詳細給出算法的可行性以及適用條件。
本文通過仿真系統(tǒng)分析聲速修正在水聲定位系統(tǒng)中的必要性,以及聲線跟蹤法和有效聲速法的基本原理、誤差來源和適用條件,為實際工程提供參考。
1 超短基線定位原理及誤差分析
1.1 定位原理
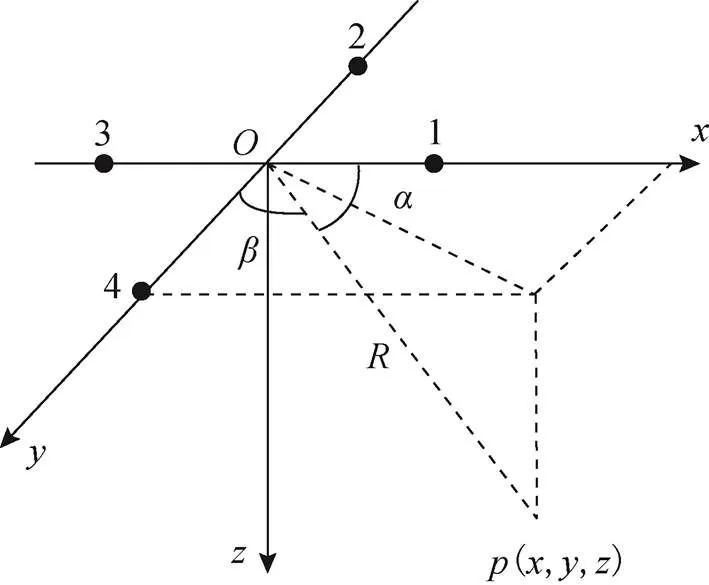
圖1 超短基線定位原理
式中:為聲波在水中的傳播速度;為基線長度。則目標定位結果為:
1.2 誤差分析
對式(3)和式(4)進行微分并整理可得:
對式(1)和式(2)進行微分并帶入式(5)和式(6)可得:
根據(jù)式(7)和式(8)可知,超短基線的定位誤差的來源主要包括測距誤差、測向誤差和測速誤差。測距誤差會隨著距離的增大而逐漸減小,隨著夾角的增大而減小。測向誤差和測速誤差隨著陣元間距的增大而減小。
對于超短基線而言,陣元間距受到安裝條件的限制,不能無限增大。本文主要通過聲速修正技術降低測速誤差,通過有效聲速法對傳統(tǒng)的聲線跟蹤算法進行改進,提高定位精度的同時,也提高算法的運行效率。
2 聲速修正算法
2.1 分層介質中的射線聲學
聲速在海水中呈現(xiàn)垂直分布特性,使得海水中的聲傳播軌跡發(fā)生彎曲,為了精確逼近實際的聲傳播軌跡,將聲速剖面分層,將復雜的聲速垂直分布近似為多個恒定聲速梯度,因此每1層的聲傳播軌跡為1段圓弧,用多段圓弧來逼近真實的聲傳播軌跡。
2.2 聲線跟蹤法

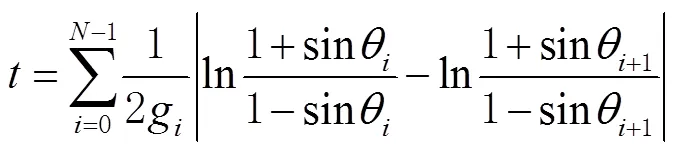
聲線跟蹤法的基本原理為:通過迭代算法在角度空間內(nèi)進行搜索,找到聲線的初始掠射角,然后根據(jù)射線聲學公式,計算聲傳播時間和傳播距離。具體流程如圖2所示。
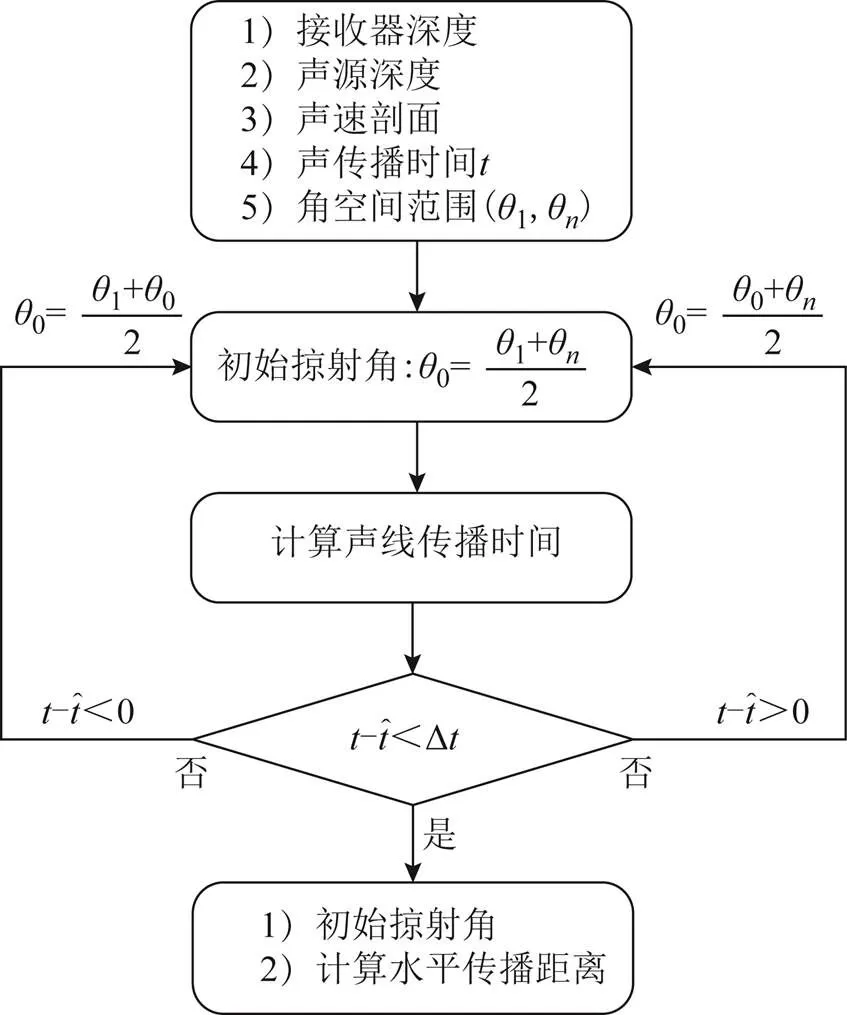
圖2 聲線跟蹤算法流程
從圖2可以看出,聲線跟蹤法能夠模擬聲波在水中的實際傳播軌跡,因此精度較高;但是由于需要通過迭代進行求解,而且每次迭代都要對聲速剖面進行分層計算,因此計算量很大。
2.3 有效聲速法
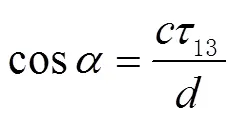
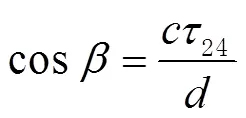
針對聲線跟蹤算法精度高、計算量大的特點,文森(Vincen)提出了有效聲速法的概念。有效聲速的定義為有效聲速等于2點之間的幾何距離與實際聲傳播時間的比值,如圖3所示。將有效聲速法應用于水聲定位系統(tǒng),在保證精度的同時,大幅度提高了運算效率。
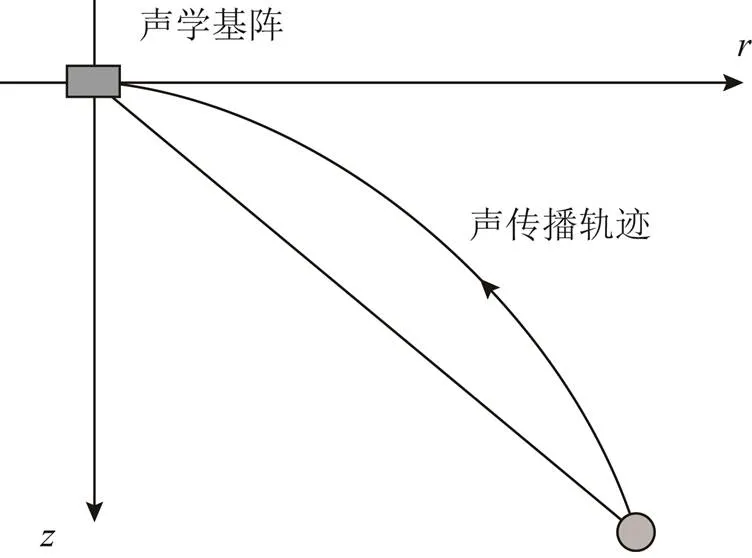
圖3 有效聲速示意
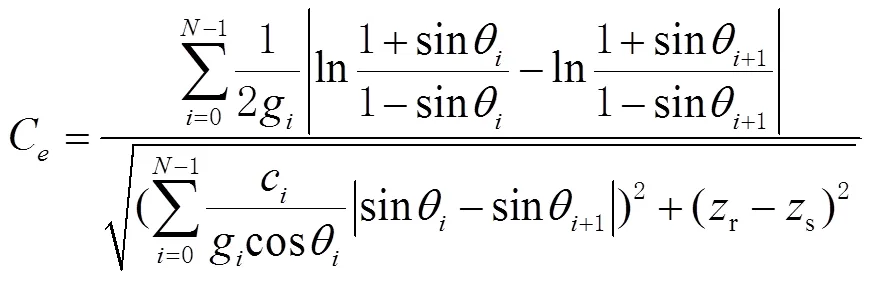
結合射線聲學的計算公式,有效聲速的數(shù)學表達式為

3 聲速修正模型誤差分析
3.1 聲速修正的必要性
聲線彎曲對超短基線定位精度的影響主要體現(xiàn)在:聲線彎曲會造成聲學夾角和幾何夾角產(chǎn)生較大偏差,如果以幾何夾角作為目標的方位角,必然會產(chǎn)生較大的定位誤差,如圖4所示,而且目標距離越遠,定位誤差越大。因此需要1種方法來消除聲線彎曲對定位的影響。
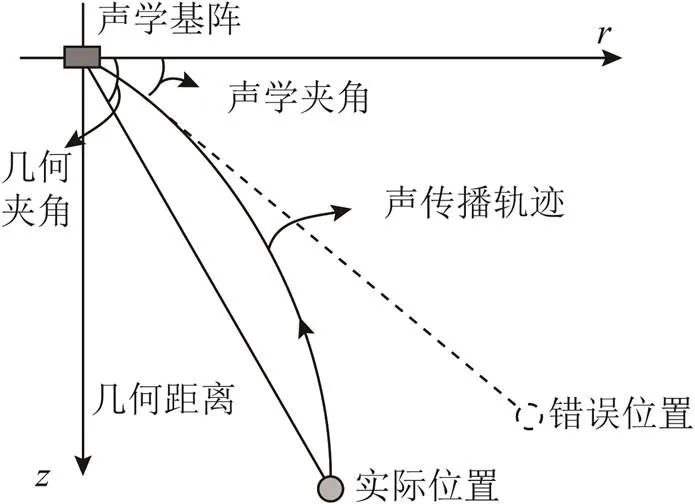
圖4 聲線彎曲對位置估計的影響
下面通過仿真分析聲線彎曲對角度測量的影響。以圖5所示的正梯度聲速分布為例,假設聲源深度為500 m,接收器位置為(0 m, 0 m),選取2組聲速梯度為0.1和0.01的聲速剖面,在該聲速分布條件下,調(diào)整幾何夾角大小,然后通過聲線跟蹤算法計算初始掠射角,并將計算結果與幾何夾角進行對比,計算角度估計誤差。
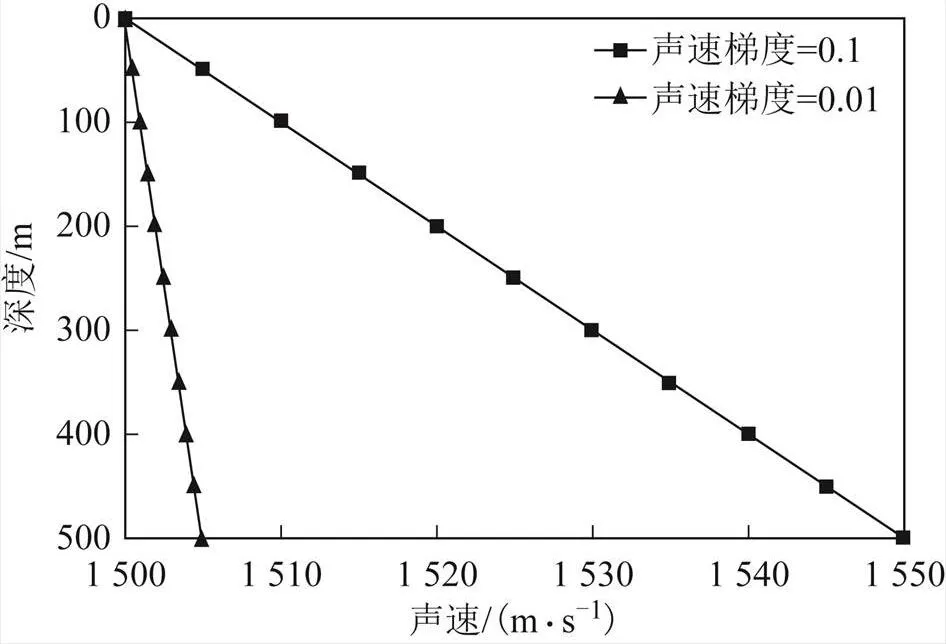
圖5 聲速剖面
圖6展示了不同聲速梯度下,聲線彎曲對角度測量影響。
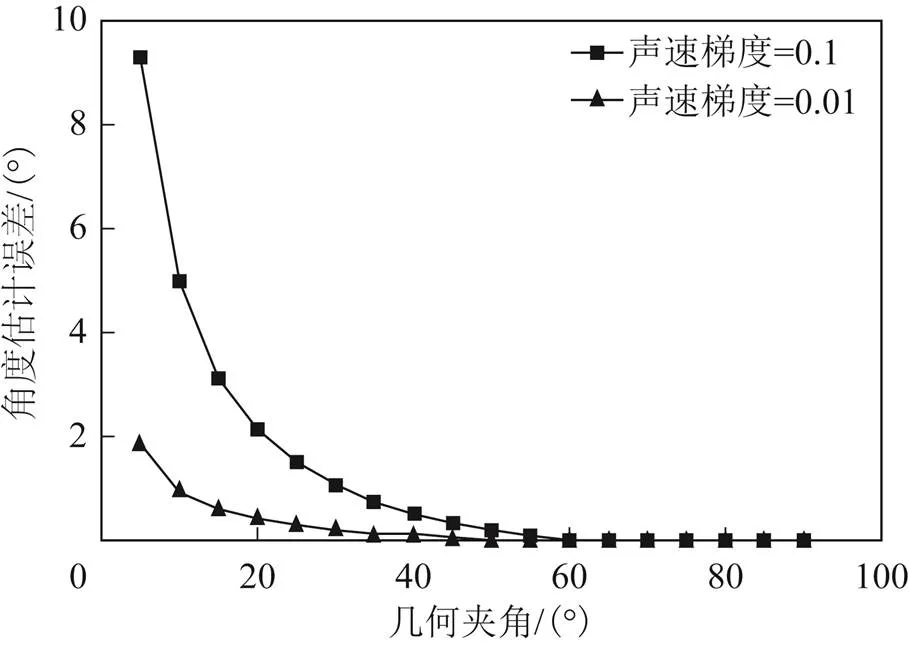
圖6 角度估計誤差
由圖5和圖6可知:在確知聲速分布下,若目標與接收基陣的深度差不變,則幾何夾角越小,聲線彎曲對角度估計的影響程度越大;聲速梯度越大,聲線彎曲對角度估計的影響程度越大。
3.2 聲線跟蹤算法的模型誤差分析
聲線跟蹤算法的基本原理為:采用分層介質模型模擬水下聲速分布,把復雜的聲速垂直分布近似由多層恒梯度聲速構成,即用每個分層為等梯度的聲速分布,替代連續(xù)變化的聲速分布,每層用1段圓弧來逼近實際聲線軌跡。
聲線跟蹤算法的誤差主要是由分層介質模型本身帶來的,而誤差的大小取決于分層的數(shù)量,下面通過理論仿真來說明分層介質模型的誤差特點。如圖7所示,虛線為南海某海域真實聲速剖面,將該聲速剖面以一定的間隔進行抽樣,獲得圖中實線。通過該模型來模擬分層介質模型帶來的誤差的特點。
通過圖7可以直觀看到分層介質假設帶來的影響,即將復雜的聲速分布近似為恒梯度聲速分布。
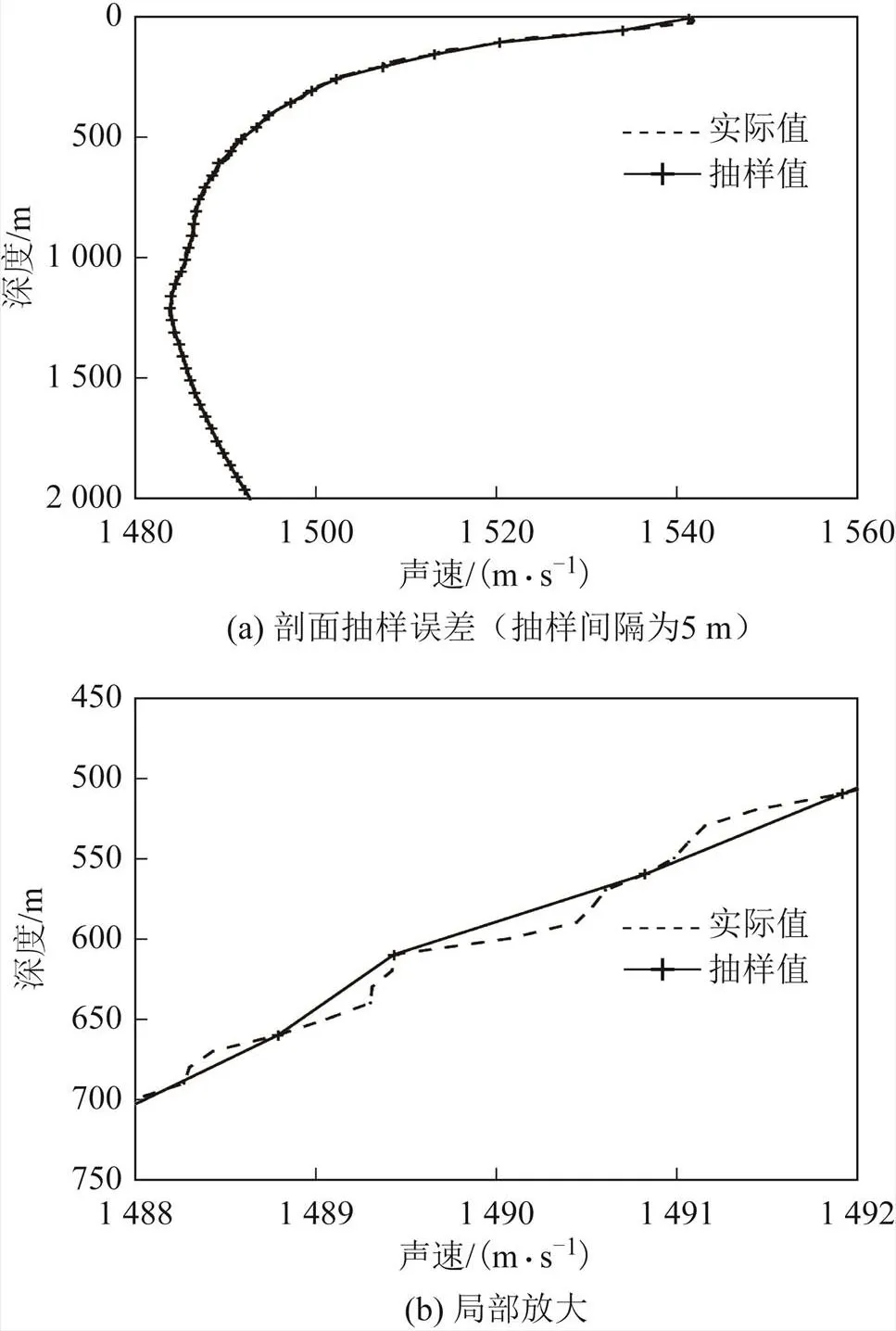
圖7 分層介質模型誤差特點
以圖7中虛線所示的聲速剖面為真實聲速分布、不同抽樣間隔獲得的聲速剖面為計算值,假設聲源位于坐標原點,接收器深度為1 000 m,改變聲源與接收器的水平距離由0增加至5000 m,通過聲線跟蹤算法,計算聲學夾角與真實聲學夾角的誤差(如圖8所示)。
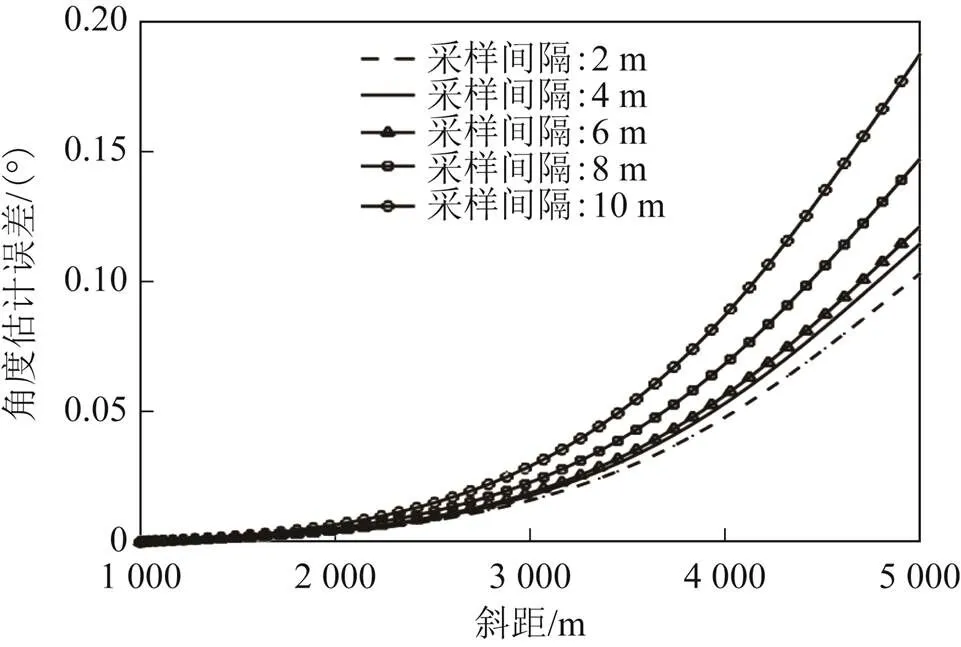
圖8 聲學夾角估計誤差-斜距
由圖8可以看出,在深度不變的情況下,隨著幾何夾角的減小,聲源與接收器的幾何距離逐漸增大,使得分層介質假設的誤差隨著距離的增加而逐漸累積。在相同位置,聲學夾角估計誤差隨著抽樣步長的增加而逐漸增大。
3.3 有效聲速法的模型誤差分析
有效聲速的意義在于:將幾何直線距離與彎曲的聲線聯(lián)系在一起,從而降低聲線彎曲的影響。
以1維2元接收信號模型為例,如圖9所示,1號基元坐標為(-0.05 m, 0, 0),2號基元坐標為(0.05 m, 0, 0),陣元間距為=0.1 m,目標聲源深度為1000 m,聲速剖面如圖7中虛線所示。
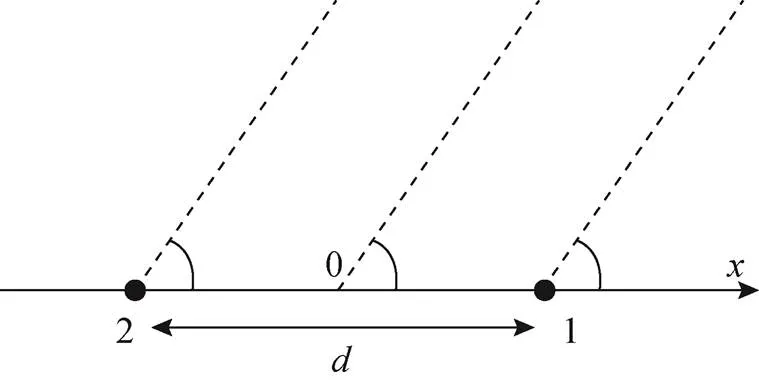
圖9 二元接收信號模型
上述假設會產(chǎn)生一定的誤差,特別是在聲源與接收器的距離較小時。若不采用遠場假設,則真實的幾何夾角應為
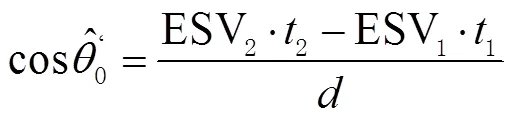
2種方法的角度估計誤差分別為:
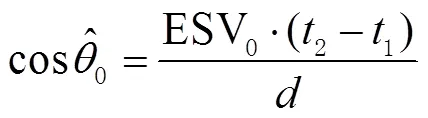
聲源深度為1 000 m且保持不變,聲源與接收器的水平距離由0變化至5000 m,可得到幾何夾角估計誤差隨斜距的變化曲線(如圖10所示)。圖10中淺色實線表示在遠場假設下,用基陣中心的有效聲速代替各基元的有效聲速產(chǎn)生的誤差;深色實線表示在非遠場假設下,各個基元的有效聲速的計算結果。由此可見,遠場假設會產(chǎn)生一定的誤差。
下面將聲速剖面進行采樣從而模擬分層介質模型,仿真過程與上述內(nèi)容一致。幾何夾角估計誤差曲線如圖11所示。
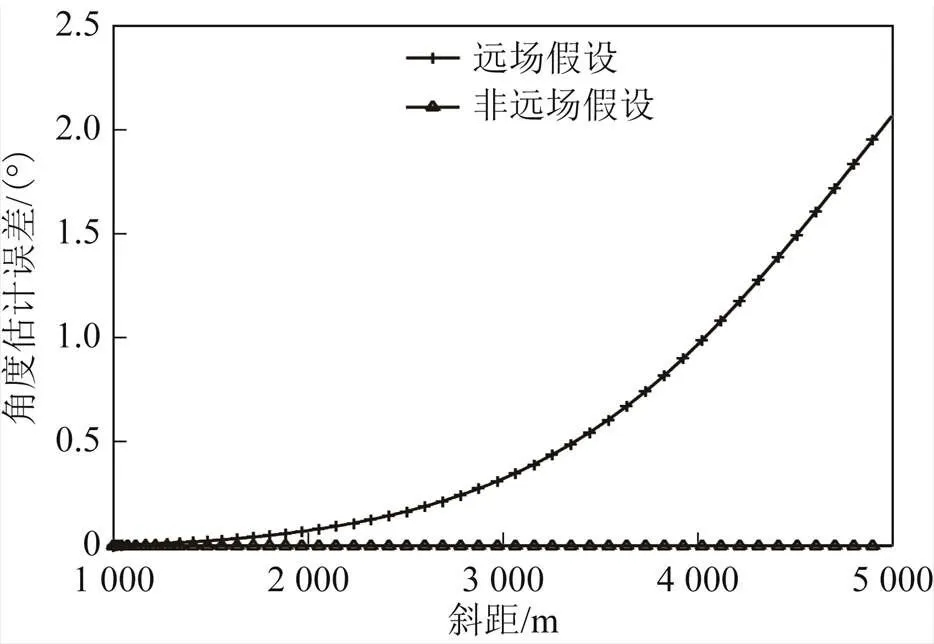
圖10 遠場假設下的幾何夾角估計誤差
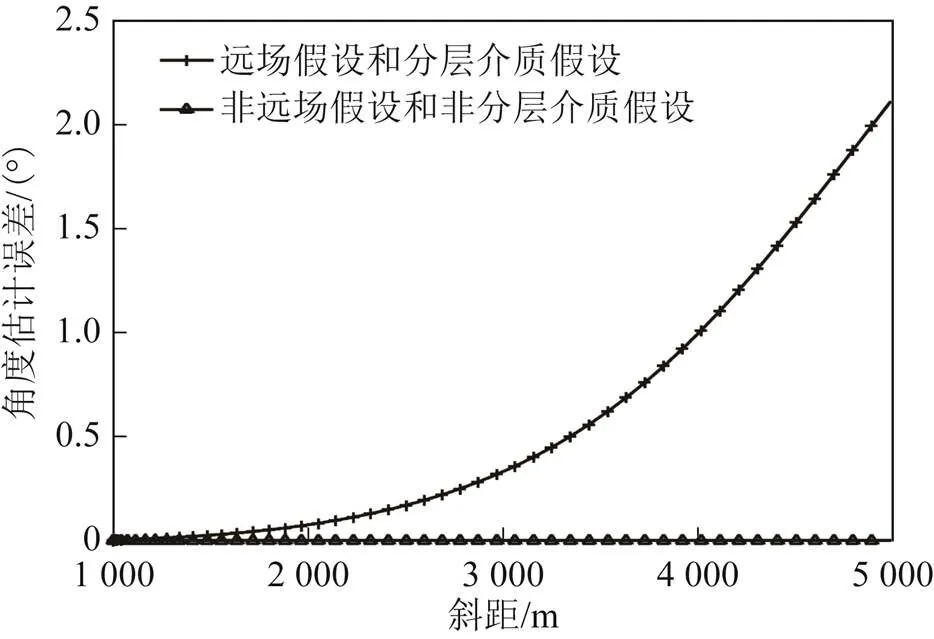
圖11 分層介質模型與遠場假設同時存在時的角度估計誤差
圖11中淺色實線表示在遠場假設下,用基陣中心的有效聲速代替各基元的有效聲速產(chǎn)生的誤差;深色實線表示在非遠場假設下各個基元的有效聲速進行計算的結果。根據(jù)圖10和圖11可以發(fā)現(xiàn),幾何夾角估計誤差的主要來源為有效聲速的近似,由于分層介質模型造成的誤差遠小于由于有效聲速近似造成的誤差,而且由于實驗條件的限制,分層介質模型造成的誤差幾乎無法避免。
4 結束語
本文針對現(xiàn)有聲速修正算法中使用最普遍的聲線跟蹤法和有效聲速法,通過計算機仿真,分析了2種方法基本原理及其造成的模型誤差。根據(jù)仿真結果可以得出如下結論:
1)在深度不變的情況下,由于聲速誤差引起的定位誤差會隨著幾何夾角的減小而增大,這是造成超短基線定位系統(tǒng)在大開角條件下定位精度較差的原因之一。
2)聲線跟蹤算法的模型誤差的產(chǎn)生原因為分層介質假設,在確知聲速分布情況下,聲學夾角估計誤差隨著介質分層數(shù)的減小而逐漸增大。由于實驗環(huán)境和條件的限制,分層介質模型造成的誤差幾乎無法避免。
3)有效聲速法為了兼顧精度和效率,通常用基陣中心的有效聲速代替所有接收基元的有效聲速相,從而產(chǎn)生了誤差,誤差的量級也遠大于聲線跟蹤法的模型誤差。為了避免該誤差,可以用每個接收基元對應的聲速進行計算,但會增加相應的計算量。
根據(jù)上述結論,在實際工程中,要根據(jù)指標要求、設備狀態(tài)、工作環(huán)境等因素,選擇更適合的聲速修正方法。
[1] 孫大軍, 鄭翠娥, 錢洪寶, 等. 水聲定位系統(tǒng)在海洋工程中的應用[J]. 聲學技術, 2012, 31(2): 125-132.
[2] 田坦. 水下定位與導航技術[M]. 北京: 國防工業(yè)出版社, 2007: 1-5.
[3] 馮守珍, 吳永亭, 唐秋華. 超短基線聲學定位原理及其應用[J]. 海岸工程, 2002, 21(4): 13-18.
[4] KINSLER L E, FREY A R, COPPENS A B, et al.Fundamentals of acoustics[M]. 4th ed.Hoboken,NJ:John Wiley & Sons,Inc.,1999: 21-40.
[5] Geng X, Zielinski A. Precise multibeam acoustic bathymetry[J]. Marine Geodesy, 1999, 22(3): 157–67.
[6] Vincent H T, Hu S L J. Method and system for determining underwater effective sound velocity: US06388948[EB/OL]. [2019-09-20]. http: //www.freepatentsonline.com/6388948. pdf.
[7] Sun D , Li H , Zheng C, et al. Sound velocity correction based on effective sound velocity for underwater acoustic positioning systems[J]. Applied Acoustics, 2019, 151: 55-62.
[8] Urick R J. Principles of underwater sound[M]. 3rd ed. Wisconsin:McGraw-Hill Book Company, 1983.
[9] 姜婷, 張吟. 聲線彎曲對水下目標定位的影響及修正方法[J]. 水雷戰(zhàn)與艦船防護, 2015,23(1): 36-40.
[10] Ameer P M, Jacob L. Localization using ray tracing for underwater acoustic sensor networks[J]. IEEE Communications Letters, 2010, 14(10): 930-932.
Application of sound speed correction technology in highly precise underwater positioning system
LI Haipeng1,2,3, HAN Yunfeng1,2,3, ZHENG Cuie1,2,3
(1. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China;2. Key Laboratory of Marine Information Acquisition and Security (Harbin Engineering University), Ministry of Industry and Information Technology; Harbin 150001, China;3. College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, China)
In order to further study on the application of sound speed correction technology in acoustic positioning system, the paper proposed an improved sound ray tracing method: the error sources of ultra-short base line (USBL) positioning was analyzed, and the center of the base line was taken as a reference to off-line calculate the effective sound velocity of sound waves from the center of the base array to all locations in the operation area; then an effective sound velocity table was obtained to guarantee the accuracy of calculation and improve the efficiency of work; finally the errors of the model were analyzed. Results showed that: when the geometric angle of the line incidence is large, the effective sound velocity method could have high precision with maintaining the calculation speed; but as the geometric angle decreases, the error of the angle estimation of the effective sound velocity method would gradually increase, not suitable for high-precise underwater acoustic positioning.
ultra-short base line; sound speed correction; effective sound velocity; sound ray tracing
P228
A
2095-4999(2020)03-0047-06
李海鵬,韓云峰,鄭翠娥.聲速修正技術在高精度水下定位系統(tǒng)中的應用[J].導航定位學報,2020,8(3): 47-52.(LI Haipeng, HAN Yunfeng, ZHENG Cuie.Application of sound speed correction technology in highly precise underwater positioning system[J]. Journal of Navigation and Positioning, 2020, 8(3): 47-52.)
10.16547/j.cnki.10-1096.20200307.
2019-11-22
國家重點研發(fā)計劃項目(2016YFB0501700);黑龍江省基金支持項目(YQ2019D003)。
李海鵬(1991—),男,河北承德人,博士研究生,研究方向為高精度水聲定位與導航。
鄭翠娥(1982—),女,湖北武漢人,博士,教授,研究方向為高精度水下定位與導航、水下傳感器網(wǎng)絡等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19