一種基于近景攝影測(cè)量的三軸氣浮臺(tái)連續(xù)姿態(tài)測(cè)量方法
2020-06-15 06:13:04張繼超蘭文琦金澤林楊雄丹周沛希劉建程
導(dǎo)航定位學(xué)報(bào) 2020年3期
關(guān)鍵詞:測(cè)量
張繼超,蘭文琦,金澤林,楊雄丹,周沛希,劉建程
一種基于近景攝影測(cè)量的三軸氣浮臺(tái)連續(xù)姿態(tài)測(cè)量方法
張繼超,蘭文琦,金澤林,楊雄丹,周沛希,劉建程
(遼寧工程技術(shù)大學(xué) 測(cè)繪與地理科學(xué)學(xué)院,遼寧 阜新 123000)
針對(duì)3自由度氣浮仿真實(shí)驗(yàn)平臺(tái)的姿態(tài)測(cè)定中,現(xiàn)有測(cè)量手段對(duì)氣浮臺(tái)空間占用較大,導(dǎo)致縮減了氣浮臺(tái)可用負(fù)載的問(wèn)題,提出1種基于近景攝影測(cè)量的3軸氣浮臺(tái)連續(xù)姿態(tài)測(cè)量方法:分析氣浮平臺(tái)姿態(tài)測(cè)定的任務(wù)需求,采用10參數(shù)模型對(duì)高精度工業(yè)相機(jī)進(jìn)行標(biāo)定;在氣浮平臺(tái)布設(shè)人工標(biāo)志點(diǎn),通過(guò)臺(tái)體坐標(biāo)系將相機(jī)坐標(biāo)系下的測(cè)量值轉(zhuǎn)換到真北基準(zhǔn)下,完成氣浮仿真裝置姿態(tài)測(cè)量平臺(tái)的搭建,實(shí)現(xiàn)對(duì)氣浮臺(tái)的連續(xù)動(dòng)態(tài)測(cè)量。實(shí)驗(yàn)結(jié)果表明,該方法在3軸方向的重復(fù)測(cè)量誤差,均優(yōu)于設(shè)計(jì)的10″容差值,證明具有可行性和有效性,可以為降低航天器系統(tǒng)的研制風(fēng)險(xiǎn)提供參考。
3軸氣浮臺(tái);近景攝影測(cè)量;標(biāo)定;真北基準(zhǔn);姿態(tài)角測(cè)量
0 引言
隨著航空航天技術(shù)的飛速發(fā)展,對(duì)航天器姿態(tài)穩(wěn)定性和控制水平的要求也大幅提高。要制造更精密且結(jié)構(gòu)復(fù)雜的航天器控制系統(tǒng),不僅對(duì)航空航天制造技術(shù)提出了較高要求,而且對(duì)精確測(cè)定航天器在太空失重環(huán)境下的位置姿態(tài)也是一項(xiàng)巨大的挑戰(zhàn)。氣浮仿真實(shí)驗(yàn)平臺(tái)能夠模擬衛(wèi)星本體在失重環(huán)境下的運(yùn)動(dòng)狀態(tài),并利用特定的測(cè)量手段,精確地測(cè)定仿真平臺(tái)在任意時(shí)刻的空間姿態(tài)信息,從而對(duì)航天器系統(tǒng)進(jìn)行評(píng)估[1-2]。
目前,根據(jù)氣浮臺(tái)姿態(tài)測(cè)定的需求,國(guó)內(nèi)有些學(xué)者提出了基于伺服測(cè)角系統(tǒng)、感應(yīng)同步器、傾角儀傳感器等氣浮臺(tái)姿態(tài)測(cè)量方案,但這些系統(tǒng)都具有復(fù)雜的機(jī)械結(jié)構(gòu)和敏感器部件,對(duì)氣浮臺(tái)空間占用較大,從而縮減了氣浮臺(tái)的可用荷載[3-4]。文獻(xiàn)[5]提出了“陀螺加傾角傳感器”(micro electro mechanical systems, MEMS)的姿態(tài)測(cè)定系統(tǒng),通過(guò)采集低精度輸出的MEMS陀螺儀角速度和高精度的傾角傳感器數(shù)據(jù),利用擴(kuò)展卡爾曼濾波器進(jìn)行角速度和角度數(shù)據(jù)處理,從而得到氣浮臺(tái)在3軸方向上的位姿信息。文獻(xiàn)[6]為解決氣浮臺(tái)偏航軸轉(zhuǎn)角難以精確測(cè)量的問(wèn)題,提出通過(guò)室內(nèi)星敏感器模擬仿真,進(jìn)行氣浮臺(tái)3軸姿態(tài)角的測(cè)定方法。文獻(xiàn)[7]通過(guò)視覺(jué)測(cè)量的方法,將光電耦合器(charge coupled device, CCD)相機(jī)安裝在氣浮臺(tái)臺(tái)面上,在臺(tái)體上方布置1種非同心圓對(duì)的特征標(biāo)靶,經(jīng)過(guò)實(shí)驗(yàn)分析得出氣浮臺(tái)3軸姿態(tài)角、光心與平面標(biāo)靶距離最大相對(duì)誤差分別小于0.02 %和0.008 %。文獻(xiàn)[8]為實(shí)現(xiàn)對(duì)3軸氣浮臺(tái)姿態(tài)的控制,嘗試采用模型預(yù)測(cè)控制器的方式,以1種非線性跟蹤微分器作為觀測(cè)器,在控制器的配合下,0同對(duì)氣浮臺(tái)自由飛行與定點(diǎn)懸浮、矩形軌跡跟蹤、圓形跟蹤等運(yùn)動(dòng)進(jìn)行仿真實(shí)驗(yàn),通過(guò)與比例積分微分(proportion integration differentiation, PID)控制器進(jìn)行對(duì)比,結(jié)果顯示PID控制效果相對(duì)較好,但前者也顯示出控制過(guò)程更加平穩(wěn)直接、抗干擾能力強(qiáng)等優(yōu)點(diǎn)。文獻(xiàn)[9]提出了1種基于單目視覺(jué)的氣浮臺(tái)位姿測(cè)量方法,通過(guò)設(shè)計(jì)1種具有旋轉(zhuǎn)、平移、縮放不變形的圓形靶標(biāo),在待識(shí)別區(qū)域內(nèi)通過(guò)“行、列”掃描算法,實(shí)現(xiàn)靶標(biāo)點(diǎn)圓心快速定位,并結(jié)合計(jì)算機(jī)系統(tǒng)下的圓心位置與視覺(jué)測(cè)量系統(tǒng)中的坐標(biāo)轉(zhuǎn)換關(guān)系,完成氣浮臺(tái)實(shí)際位姿的解算。
本文采用近景攝影測(cè)量方法,來(lái)解決氣浮臺(tái)姿態(tài)測(cè)量問(wèn)題,實(shí)現(xiàn)了氣浮臺(tái)的連續(xù)動(dòng)態(tài)監(jiān)測(cè)。近景攝影測(cè)量方法因其具有信息容量大、非接觸、操作簡(jiǎn)便、快速高效、易儲(chǔ)存和不易受溫度變化、振動(dòng)等外界因素干擾的特點(diǎn),已經(jīng)廣泛地應(yīng)用到了大型工業(yè)測(cè)量領(lǐng)域中[10]。將近景攝影測(cè)量方法應(yīng)用到3自由度氣浮仿真實(shí)驗(yàn)平臺(tái)的姿態(tài)角測(cè)量中,則是1種對(duì)氣浮臺(tái)姿態(tài)測(cè)量的新嘗試。
本方法是在氣浮臺(tái)上布設(shè)人工標(biāo)志點(diǎn),搭建氣浮臺(tái)仿真裝置姿態(tài)測(cè)量平臺(tái)。采用高精度的相機(jī)標(biāo)定方法和立方鏡光學(xué)準(zhǔn)直技術(shù),分別標(biāo)定測(cè)量氣浮臺(tái)姿態(tài)的相機(jī)和臺(tái)體的真北基準(zhǔn)。
1 相機(jī)標(biāo)定
氣浮仿真平臺(tái)姿態(tài)測(cè)量的精度要求是,3軸方向的角度重復(fù)測(cè)量誤差不超過(guò)10″。相機(jī)標(biāo)定是影響近景攝影測(cè)量精度的主要因素之一,用標(biāo)定參數(shù)修正后,能有效減弱鏡頭的光學(xué)畸變與相機(jī)系統(tǒng)誤差。
1.1 相機(jī)待標(biāo)定的10參數(shù)模型
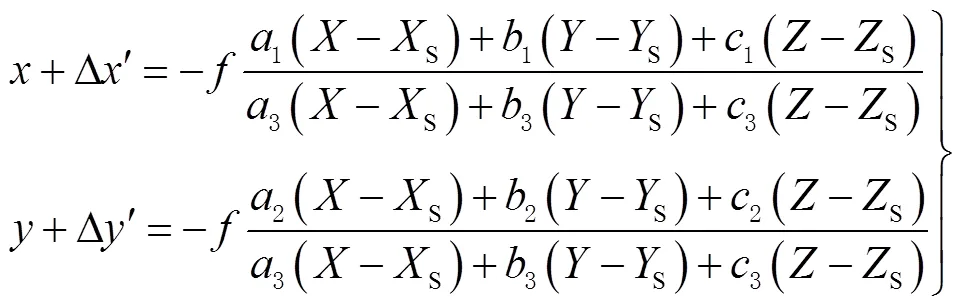
為使共線方程成立,必須考慮像點(diǎn)坐標(biāo)偏差。圖像中任意點(diǎn)的系統(tǒng)性誤差可以歸納為徑向、偏心、像平面和內(nèi)方位元素等導(dǎo)致的畸變誤差,考慮像點(diǎn)系統(tǒng)誤差的存在,共線條件方程[10]最終形式為

假定平面標(biāo)定板在世界坐標(biāo)系中的坐標(biāo)為0,在2個(gè)以上位置對(duì)標(biāo)定版進(jìn)行采集,基于線性模型計(jì)算得出攝像機(jī)參數(shù)的1個(gè)優(yōu)化解,考慮徑向誤差和切向誤差構(gòu)造目標(biāo)函數(shù),然后基于最大似然法進(jìn)行非線性求解,能有效減弱鏡頭的光學(xué)畸變與相機(jī)系統(tǒng)誤差的影響。采用改進(jìn)的10參數(shù)模型進(jìn)行相機(jī)標(biāo)定,像點(diǎn)坐標(biāo)誤差方程式可由式(1)經(jīng)過(guò)線性化得

其余各參數(shù)相應(yīng)的系數(shù)矩陣為
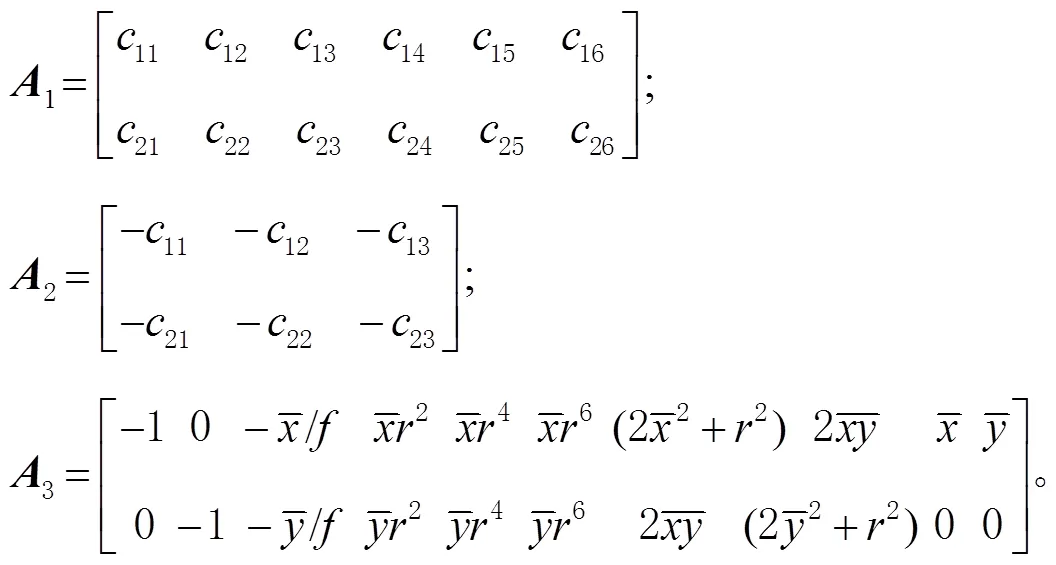
c(=1,2,=1,2,…,6)為線性化后投影矩陣的相機(jī)系數(shù),為像點(diǎn)的徑向距離。
式(2)~式(4)統(tǒng)稱為數(shù)字?jǐn)z影相機(jī)標(biāo)定的10參數(shù)模型,可根據(jù)情況對(duì)全部或部分參數(shù)進(jìn)行標(biāo)定。
1.2 相機(jī)標(biāo)定誤差分析
本文應(yīng)用的高精度工業(yè)相機(jī)相機(jī)參數(shù)如表1所示。
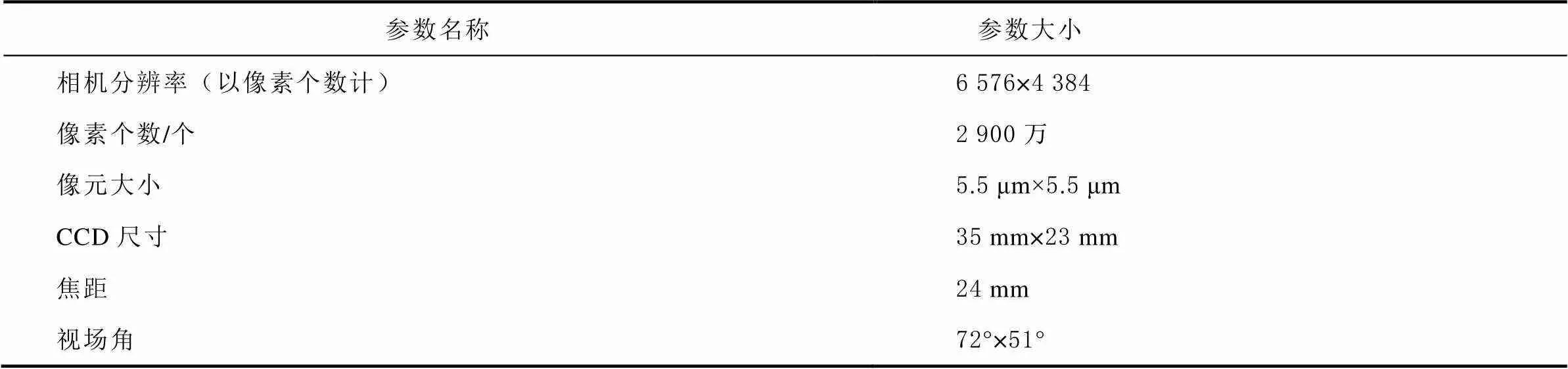
表1 高精度相機(jī)參數(shù)
標(biāo)定測(cè)量方法是使用高精度單相機(jī),對(duì)氣浮臺(tái)錐形筒上的編碼標(biāo)志進(jìn)行測(cè)量而完成的。相機(jī)測(cè)量精度取決于像點(diǎn)提取的精度、測(cè)量物體的大小和測(cè)量距離。
2 真北基準(zhǔn)、相機(jī)與臺(tái)體坐標(biāo)間轉(zhuǎn)換
為測(cè)量獲取氣浮臺(tái)裝置在真北基準(zhǔn)下的實(shí)時(shí)姿態(tài)角,采用立方鏡光學(xué)準(zhǔn)直技術(shù)、陀螺全站儀定向?qū)け焙屯c(diǎn)坐標(biāo)系轉(zhuǎn)換等相結(jié)合的方法,通過(guò)臺(tái)體立方鏡坐標(biāo)系,完成動(dòng)態(tài)測(cè)量相機(jī)坐標(biāo)系和真北基準(zhǔn)間關(guān)系的建立[11]。
2.1 臺(tái)體坐標(biāo)系與真北基準(zhǔn)間的標(biāo)定
臺(tái)體坐標(biāo)系與真北基準(zhǔn)標(biāo)定工作有2個(gè)方面:①通過(guò)對(duì)臺(tái)體立方鏡的準(zhǔn)直測(cè)量,以及各臺(tái)儀器間的互瞄,來(lái)建立臺(tái)體坐標(biāo)系;②尋找真北基準(zhǔn),將真北基準(zhǔn)引到基準(zhǔn)立方鏡上,再通過(guò)幾次方位角的轉(zhuǎn)折傳遞,來(lái)標(biāo)定臺(tái)體立方鏡準(zhǔn)直面法線的地理方位角。
實(shí)驗(yàn)采用3臺(tái)LeicaTM6100A電子經(jīng)緯儀和1臺(tái)陀螺全站儀。為了讓各臺(tái)儀器間能夠通視,需要對(duì)各臺(tái)儀器的安放位置進(jìn)行調(diào)整,實(shí)驗(yàn)室測(cè)量情況如圖1(a)所示。利用陀螺全站儀和LeicaTM6100A電子經(jīng)緯儀間的相互瞄準(zhǔn)觀測(cè)來(lái)解算2立方鏡間的轉(zhuǎn)角,如圖1(b)所示。
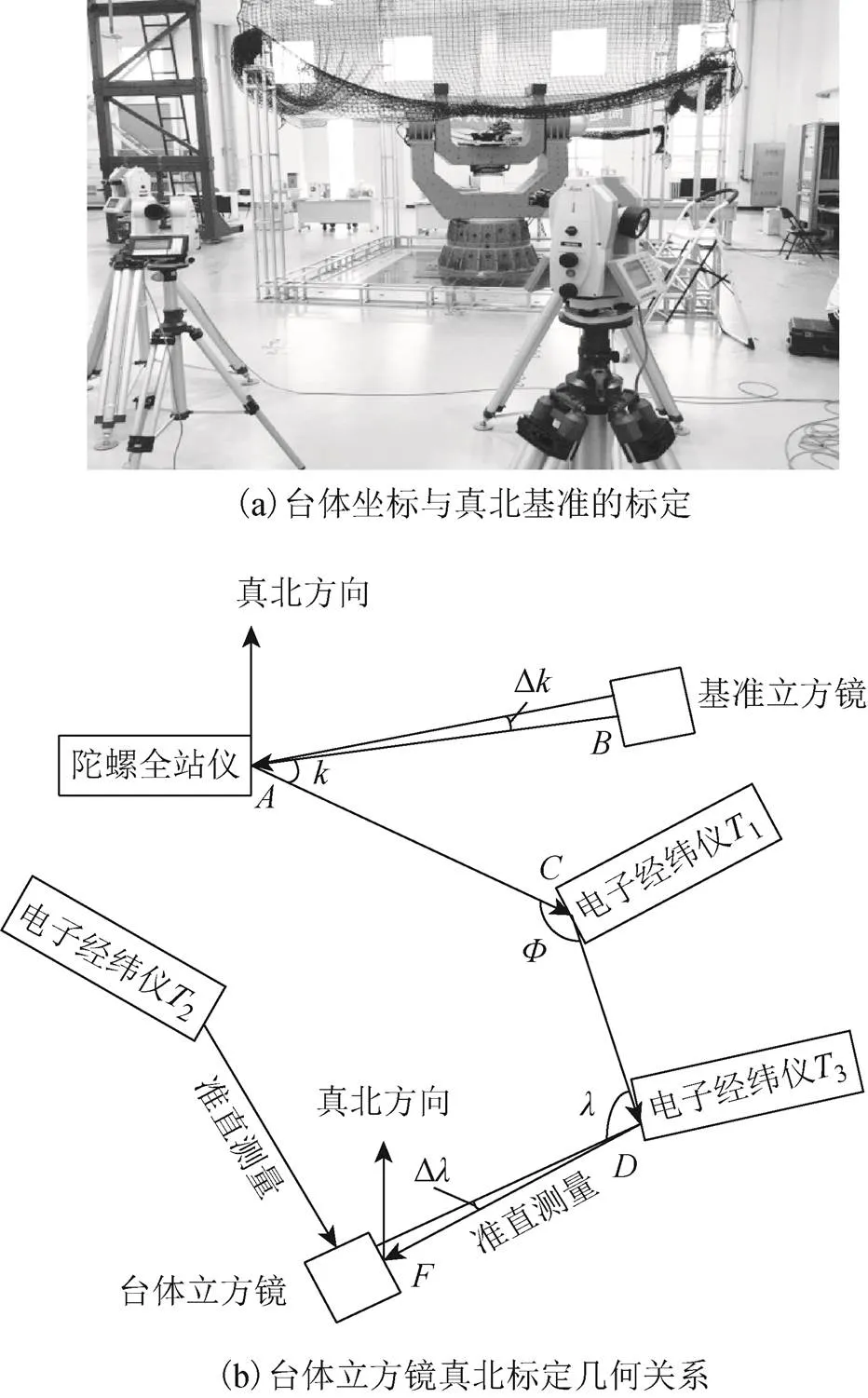
圖1 臺(tái)體坐標(biāo)與真北基準(zhǔn)間的標(biāo)定
首先通過(guò)準(zhǔn)直測(cè)量確定準(zhǔn)直面法線方向,采用交會(huì)法測(cè)定立方鏡中心點(diǎn)坐標(biāo);其次由儀器間的互瞄測(cè)量,得到各儀器設(shè)站位置點(diǎn)的空間坐標(biāo);最后得到立方鏡中心點(diǎn)坐標(biāo)和2臺(tái)準(zhǔn)直經(jīng)緯儀所在點(diǎn)的坐標(biāo)。以立方鏡中心為原點(diǎn),通過(guò)3個(gè)點(diǎn)確定臺(tái)體立方鏡坐標(biāo)系的軸和軸,再由右手準(zhǔn)則得到軸,最后測(cè)出臺(tái)體立方鏡準(zhǔn)直面法線的地理方位角,即為立方鏡坐標(biāo)系軸的地理方位角,由此便建立了臺(tái)體坐標(biāo)系與真北基準(zhǔn)之間的聯(lián)系。
2.2 相機(jī)坐標(biāo)系與臺(tái)體坐標(biāo)系間的標(biāo)定
相機(jī)坐標(biāo)系與臺(tái)體坐標(biāo)系之間的標(biāo)定主要通過(guò)公共點(diǎn)的轉(zhuǎn)換來(lái)實(shí)現(xiàn)。分別使用標(biāo)定相機(jī)和全站儀測(cè)量臺(tái)體上的標(biāo)志點(diǎn),獲取同名標(biāo)志點(diǎn)在標(biāo)定相機(jī)坐標(biāo)系和臺(tái)體坐標(biāo)系下的坐標(biāo)數(shù)據(jù),經(jīng)過(guò)計(jì)算得到2坐標(biāo)系之間的轉(zhuǎn)換參數(shù)(如表2所示)。
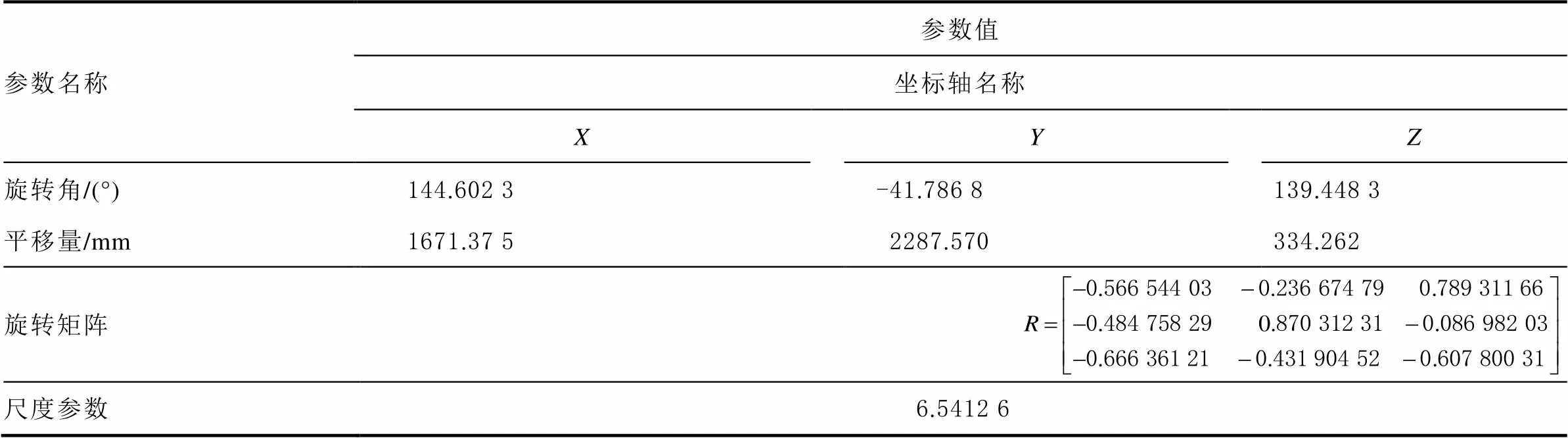
表2 單相機(jī)與標(biāo)定相機(jī)間的轉(zhuǎn)換參數(shù)
由此建立動(dòng)態(tài)測(cè)量相機(jī)坐標(biāo)與標(biāo)定相機(jī)坐標(biāo)、標(biāo)定相機(jī)坐標(biāo)與臺(tái)體坐標(biāo)之間的轉(zhuǎn)換關(guān)系,又因標(biāo)定相機(jī)坐標(biāo)系在前后2次轉(zhuǎn)換中保持不變,故動(dòng)態(tài)測(cè)量相機(jī)坐標(biāo)系下的測(cè)量成果在經(jīng)過(guò)2次坐標(biāo)間的轉(zhuǎn)換后,得到臺(tái)體坐標(biāo)系下的測(cè)量值,并且臺(tái)體坐標(biāo)在此之前經(jīng)過(guò)與真北基準(zhǔn)之間的標(biāo)定,最終將臺(tái)體坐標(biāo)系下的值轉(zhuǎn)換到真北基準(zhǔn)下,獲得氣浮臺(tái)真北基準(zhǔn)下的實(shí)時(shí)姿態(tài)角。
3 實(shí)驗(yàn)與結(jié)果分析
3.1 相機(jī)標(biāo)定實(shí)驗(yàn)
將標(biāo)定板放置在穩(wěn)定且周圍無(wú)其他雜點(diǎn)的位置上,手持待標(biāo)定相機(jī)從標(biāo)定板正面、正面旋轉(zhuǎn)90°、前俯、后仰、左傾斜和右傾斜角度進(jìn)行拍攝;采用攝影測(cè)量系統(tǒng)IDPMS進(jìn)行解算,經(jīng)掃描、標(biāo)志點(diǎn)提取、匹配和平差迭代,獲得標(biāo)志點(diǎn)點(diǎn)云(如圖2所示)。
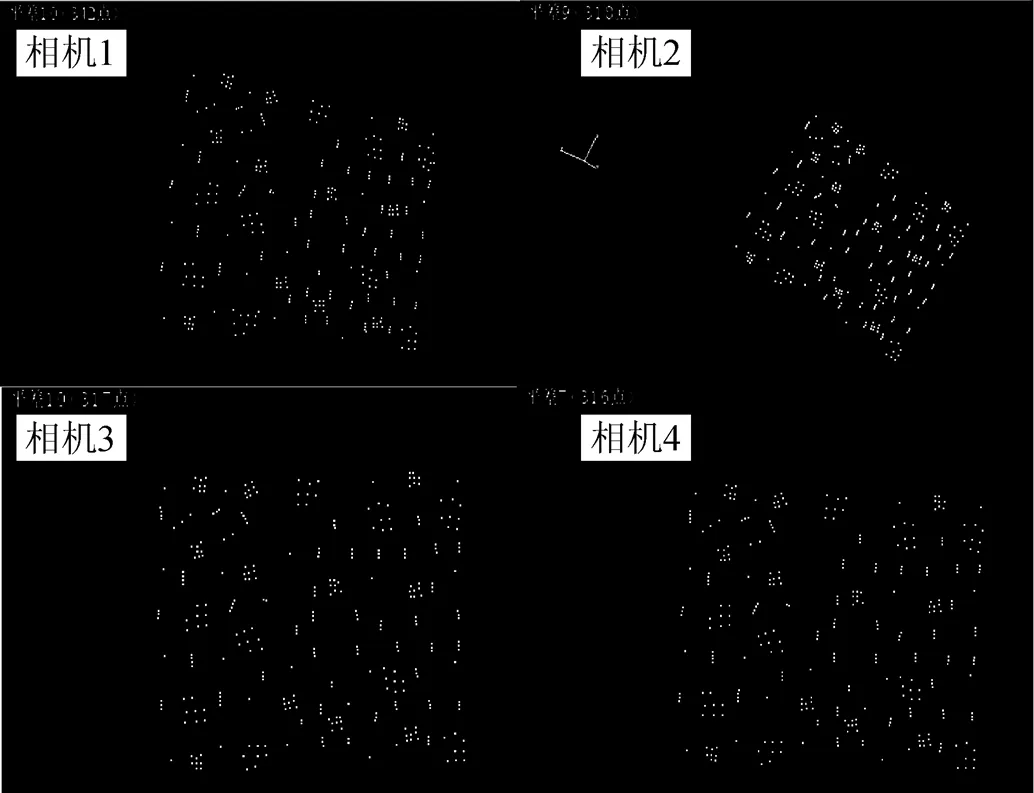
圖2 4相機(jī)標(biāo)定點(diǎn)云數(shù)據(jù)
根據(jù)上述求解的標(biāo)志點(diǎn)坐標(biāo),采用待標(biāo)定的10參數(shù)模型建立相機(jī)內(nèi)部參數(shù)誤差方程式,經(jīng)解算得到4相機(jī)內(nèi)部參數(shù)標(biāo)定結(jié)果(如表3[12]所示)。
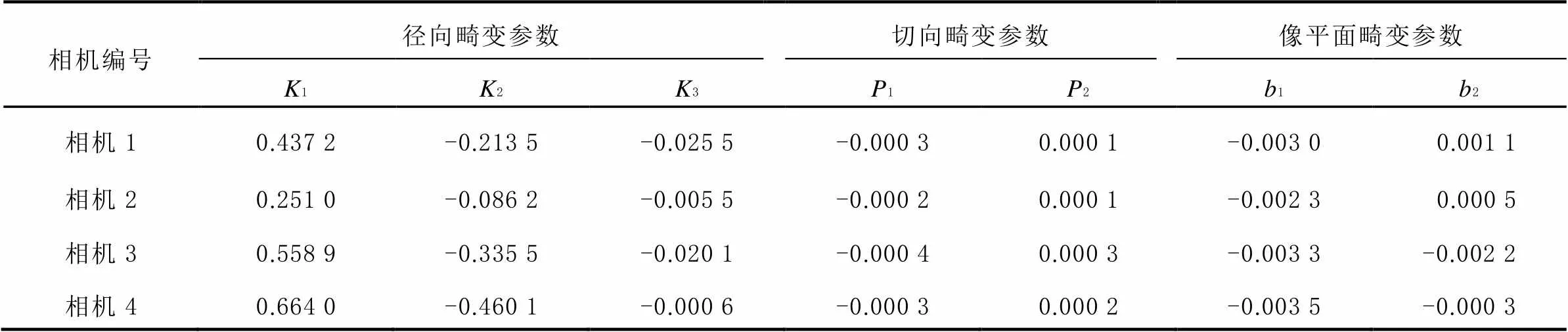
表3 測(cè)量相機(jī)內(nèi)部參數(shù)標(biāo)定結(jié)果
為體現(xiàn)相機(jī)標(biāo)定對(duì)測(cè)量結(jié)果的影響,設(shè)置了7組不同畸變標(biāo)定參數(shù)來(lái)進(jìn)行實(shí)驗(yàn)。將物方點(diǎn)坐標(biāo)計(jì)算值與高精度標(biāo)定相機(jī)測(cè)量值進(jìn)行對(duì)比,統(tǒng)計(jì)坐標(biāo)差值,并用均方根(root mean square, RMS)來(lái)評(píng)定測(cè)量點(diǎn)精度,對(duì)比結(jié)果如表4所示。
從表4可看出:
1)鏡頭光學(xué)畸變對(duì)測(cè)量精度影響較大,相機(jī)使用前必須進(jìn)行標(biāo)定;
2)3、1和2對(duì)坐標(biāo)測(cè)量結(jié)果影響較小;
3)采用10參數(shù)來(lái)修正像點(diǎn)系統(tǒng)誤差是有效的。
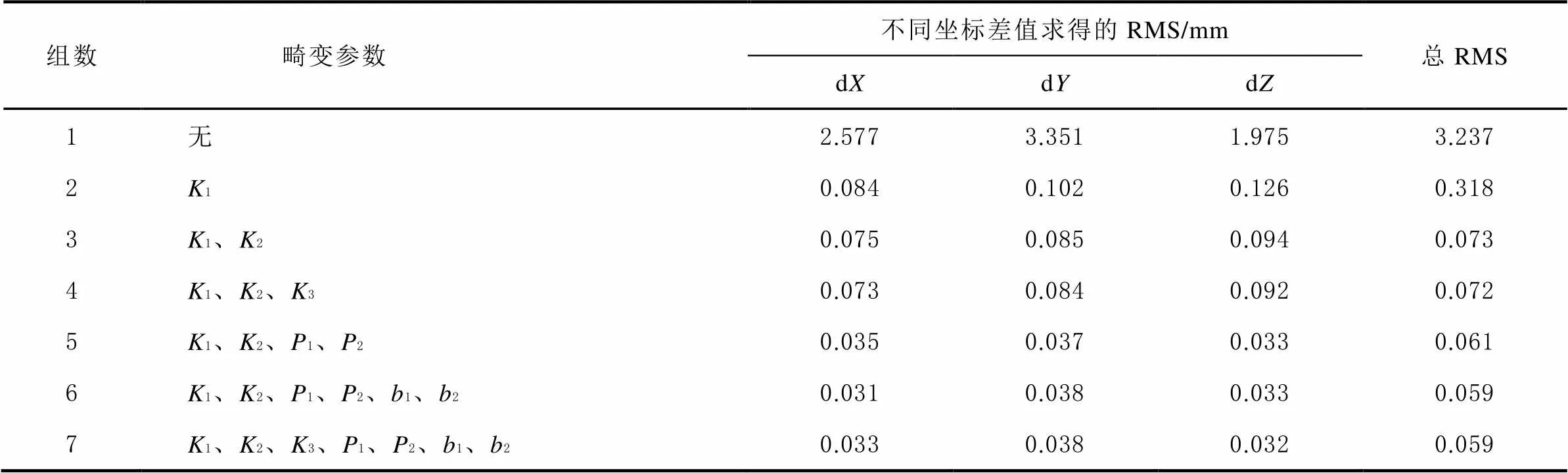
表4 不同畸變參數(shù)標(biāo)定結(jié)果
3.2 錐形測(cè)量控制網(wǎng)布設(shè)
實(shí)驗(yàn)采用模擬現(xiàn)場(chǎng)環(huán)境的方式來(lái)模擬氣浮臺(tái)工作,在相對(duì)穩(wěn)定的環(huán)境下,采用錐形構(gòu)件代替氣浮臺(tái)錐形筒,在錐形構(gòu)件內(nèi)側(cè)粘貼直徑為6 mm的編碼標(biāo)志塊和無(wú)編碼標(biāo)志點(diǎn),多個(gè)標(biāo)志塊和多個(gè)標(biāo)志構(gòu)成了錐形檢定實(shí)驗(yàn)場(chǎng)。錐形筒內(nèi)編碼標(biāo)志粘貼情況如圖3(a)所示。首先,利用標(biāo)定子系統(tǒng)中的高精度標(biāo)定相機(jī)模塊對(duì)錐形構(gòu)件進(jìn)行拍攝,獲取錐形構(gòu)件控制場(chǎng)圖像;其次,將圖像導(dǎo)入IDPMS中進(jìn)行圖像掃描、標(biāo)志點(diǎn)識(shí)別和特征點(diǎn)匹配等處理,經(jīng)光束法平差迭代得到控制場(chǎng)內(nèi)各標(biāo)志點(diǎn)坐標(biāo),最后,將其結(jié)果作為后續(xù)測(cè)量數(shù)據(jù)解算的控制點(diǎn)。經(jīng)解算得到控制場(chǎng)標(biāo)志點(diǎn)點(diǎn)云如圖3(b)所示。
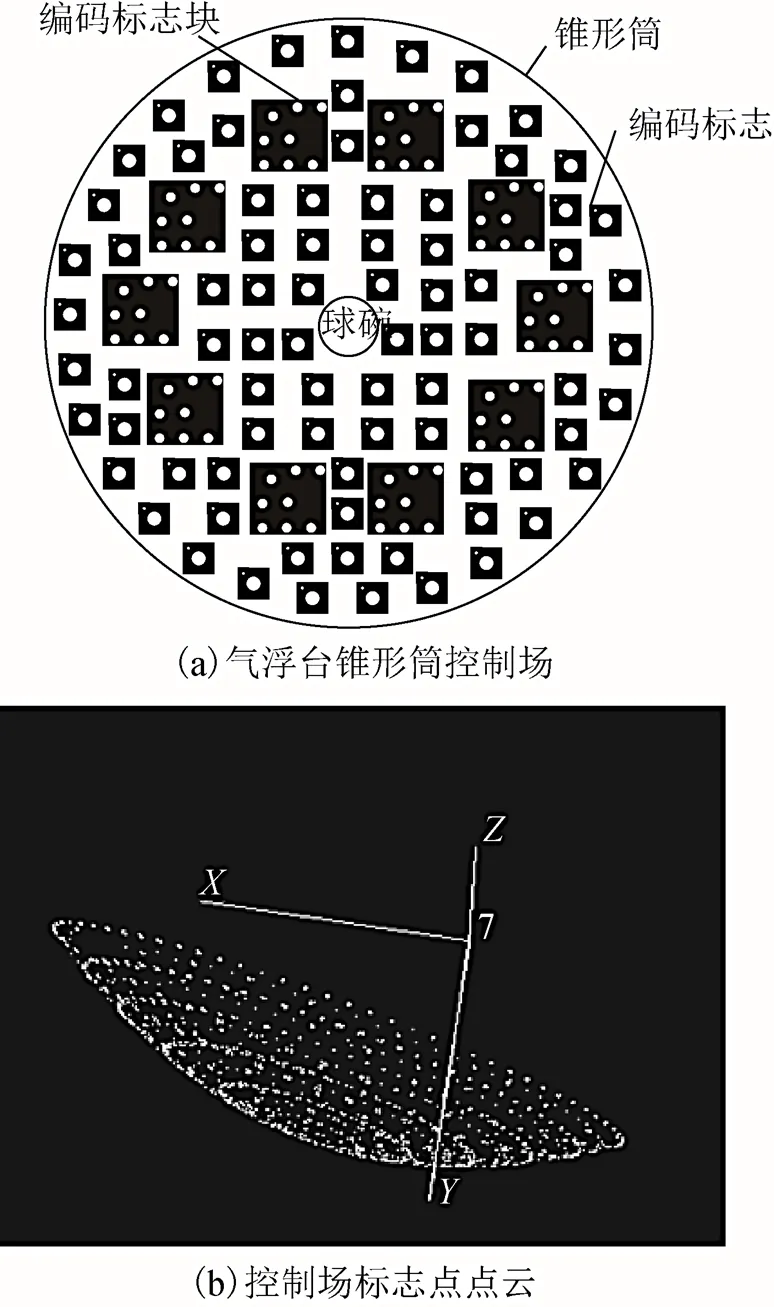
圖3 氣浮臺(tái)錐形控制場(chǎng)與標(biāo)志點(diǎn)點(diǎn)云
3.3 理論測(cè)量精度
使用單相機(jī)后方交會(huì)對(duì)氣浮臺(tái)實(shí)時(shí)姿態(tài)角測(cè)量,設(shè)計(jì)相機(jī)的測(cè)量精度小于等于10″,即在單相機(jī)后方交會(huì)時(shí),測(cè)量精度小于等于48.5 μm。測(cè)量誤差源來(lái)自于相機(jī)及解算模型誤差。
采用后方交會(huì)進(jìn)行精度評(píng)定的方法為

3.4 實(shí)驗(yàn)測(cè)量精度
實(shí)驗(yàn)方法為:保持錐形構(gòu)件垂直朝下的初始位姿,用4臺(tái)測(cè)量相機(jī)豎直向上對(duì)準(zhǔn)錐形構(gòu)件靶面;在4臺(tái)相機(jī)中央架設(shè)三角支架,在支架上固定錐形構(gòu)件。調(diào)節(jié)支架使構(gòu)件旋轉(zhuǎn)1周,轉(zhuǎn)動(dòng)過(guò)程中4臺(tái)相機(jī)對(duì)構(gòu)件進(jìn)行實(shí)時(shí)拍攝,獲取標(biāo)志點(diǎn)圖像后進(jìn)行解算,所得點(diǎn)云數(shù)據(jù)及4臺(tái)相機(jī)在控制場(chǎng)中的位置如圖4(a)所示。為驗(yàn)證這種方法的可靠性[13-14],采用3 mm的編碼塊和標(biāo)志點(diǎn)重新布設(shè)錐形構(gòu)件,然后再次測(cè)量,得到點(diǎn)云數(shù)據(jù)如圖4(b)所示。
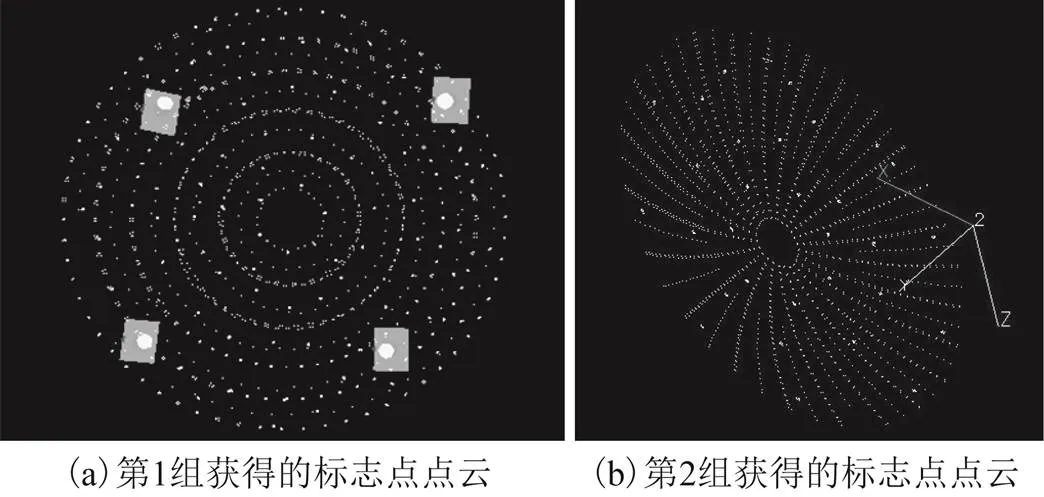
圖4 相機(jī)獲得靶面標(biāo)志點(diǎn)電云
對(duì)標(biāo)志點(diǎn)坐標(biāo)數(shù)據(jù)進(jìn)行光束法平差,得到測(cè)量點(diǎn)的結(jié)果如表5所示。
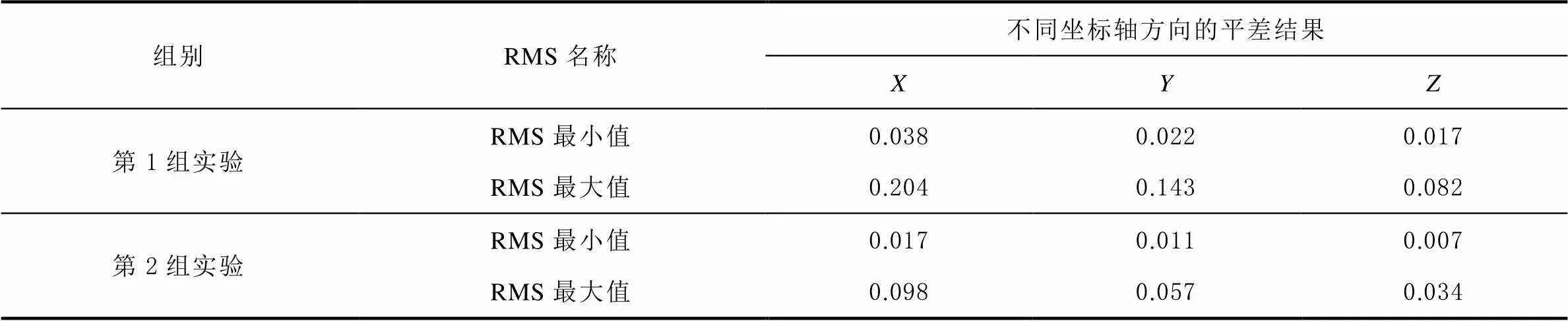
表5 測(cè)量點(diǎn)坐標(biāo)平差結(jié)果 單位:mm
從表5可以看出,標(biāo)志點(diǎn)坐標(biāo)2次平差結(jié)果在、和3個(gè)方向上最小偏差分別為0.038、0.022和0.017以及0.017、0.011和0.007mm,相機(jī)測(cè)量及解算的點(diǎn)位精度高,可作為基準(zhǔn)數(shù)據(jù),為后續(xù)測(cè)量值作對(duì)比參考。

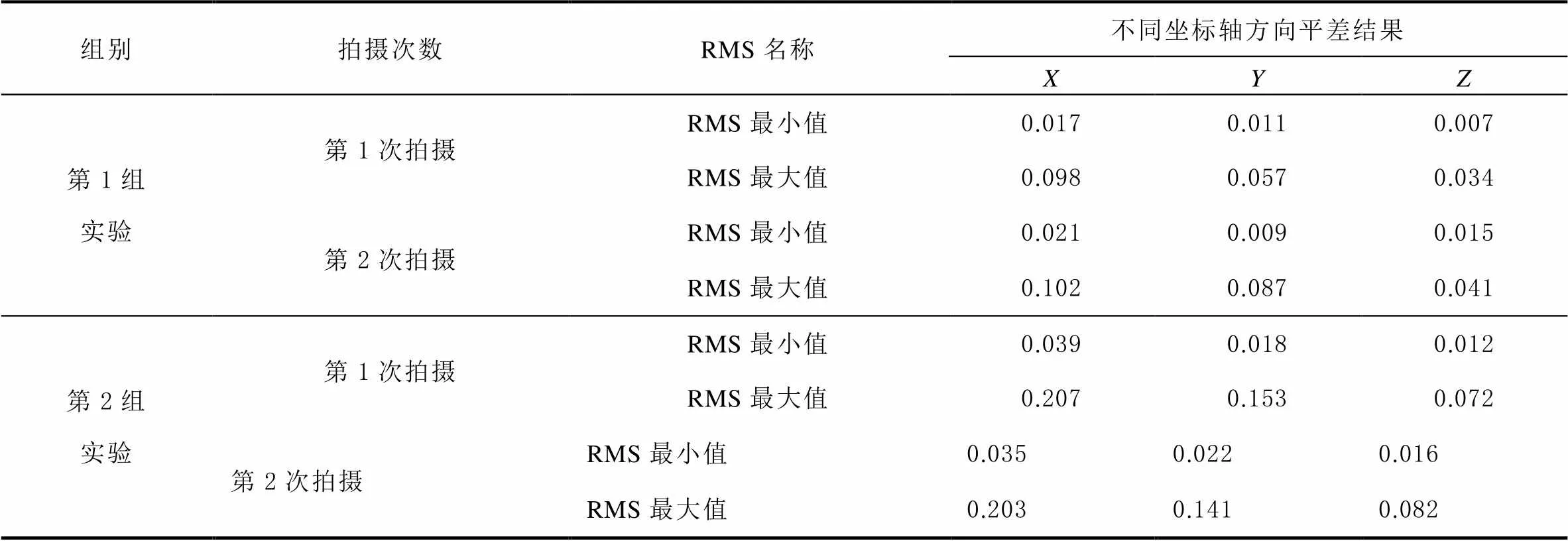
表6 位姿變化后標(biāo)志點(diǎn)平差結(jié)果 單位:mm
根據(jù)前后變化的標(biāo)志點(diǎn)坐標(biāo)數(shù)據(jù),解算模擬構(gòu)件在3軸方向的角度變化,解算結(jié)果如表7所示。
從對(duì)準(zhǔn)結(jié)果的坐標(biāo)殘差值來(lái)看,2次標(biāo)志點(diǎn)對(duì)準(zhǔn)效果相當(dāng),在3軸方向上的點(diǎn)位對(duì)準(zhǔn)精度在0.02~0.05mm的理想解算精度范圍,標(biāo)志點(diǎn)坐標(biāo)測(cè)量結(jié)果準(zhǔn)確有效。
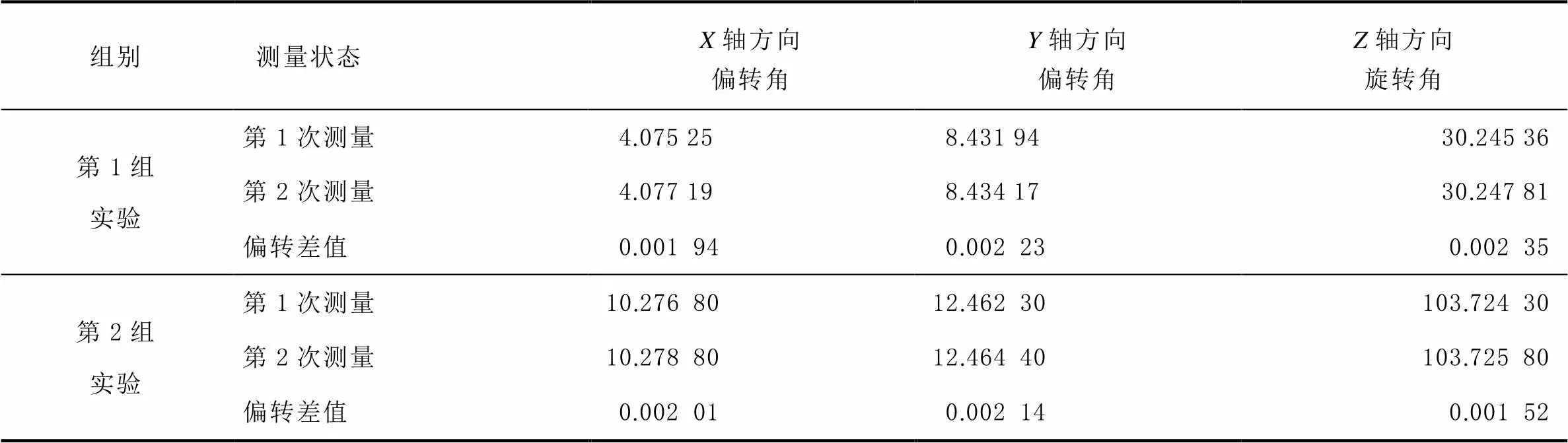
表7 模型相對(duì)初始位姿偏轉(zhuǎn)值 單位:°
第1次實(shí)驗(yàn)測(cè)量相機(jī)在3軸方向上對(duì)模擬構(gòu)件角度重復(fù)測(cè)量的誤差分別為0.00194°、0.00223°和0.00235°,即差值為6.984″、8.028″和8.46″,3軸方向角度測(cè)量偏差不超過(guò)10″,滿足測(cè)量精度要求。
第2次實(shí)驗(yàn)測(cè)量相機(jī)在3軸方向上對(duì)模擬構(gòu)件角度重復(fù)測(cè)量的誤差分別為0.00201°、0.00214°和0.00152°,即差值為7.236″、7.704″和5.472″,可排除測(cè)量精度效果具有的偶然性。說(shuō)明采用標(biāo)定的測(cè)量相機(jī)能夠?qū)崿F(xiàn)對(duì)氣浮臺(tái)模擬構(gòu)件的精確測(cè)量,在3軸方向,姿態(tài)角的測(cè)量誤差不大于10″。
4 結(jié)束語(yǔ)
通過(guò)分析氣浮平臺(tái)姿態(tài)測(cè)定的任務(wù)需求,提出采用近景攝影測(cè)量方法對(duì)氣浮平臺(tái)的位姿進(jìn)行測(cè)量。為獲得可靠的結(jié)果,首先利用10參數(shù)模型對(duì)高精度工業(yè)相機(jī)進(jìn)行標(biāo)定,然后通過(guò)標(biāo)志點(diǎn)坐標(biāo)解算來(lái)獲取氣浮仿真實(shí)驗(yàn)平臺(tái)在3軸方向的位姿信息,經(jīng)對(duì)錐形構(gòu)建的實(shí)驗(yàn)室模擬測(cè)量,得出如下結(jié)論:
1)鏡頭光學(xué)畸變對(duì)測(cè)量精度影響較大,經(jīng)過(guò)10參數(shù)模型標(biāo)定后的相機(jī)在測(cè)量誤差精度上要高出1~2個(gè)數(shù)量級(jí),相機(jī)參數(shù)標(biāo)定是必要的。
2)對(duì)動(dòng)態(tài)測(cè)量相機(jī)后方交會(huì)的精度進(jìn)行分析后,總結(jié)出3軸氣浮臺(tái)姿態(tài)角測(cè)量方案的理論精度,模擬實(shí)驗(yàn)表明,該測(cè)量方案在3軸方向的偏轉(zhuǎn)重復(fù)誤差均小于10″,驗(yàn)證了該測(cè)量方案的可行性。
[1] 林海奇. 三軸氣浮臺(tái)質(zhì)量特性優(yōu)化設(shè)計(jì)及其參數(shù)辨識(shí)方法研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2018.
[2] 潘俊帆, 康國(guó)華, 周瓊峰. 三軸氣浮臺(tái)重心自動(dòng)調(diào)整研究[J]. 航天控制, 2017, 35(2): 83-88.
[3] 李新峰, 向東, 田興華, 等. 平面微重力模擬氣浮系統(tǒng)的側(cè)向力測(cè)量與處理[J]. 系統(tǒng)仿真學(xué)報(bào), 2018, 30(10): 3746-3752.
[4] 徐洲洋, 肖東升. 近景攝影測(cè)量支持下的地鐵盾構(gòu)管片姿態(tài)測(cè)量方法及其應(yīng)用[J]. 測(cè)繪通報(bào), 2019(1): 75-78.
[5] 展浩. 基于MEMS的運(yùn)動(dòng)姿態(tài)參考系統(tǒng)的設(shè)計(jì)與研究[D]. 哈爾濱: 哈爾濱工程大學(xué), 2019.
[6] 肖巖, 葉東, 孫兆偉.面向三軸氣浮臺(tái)的室內(nèi)星敏感器定姿方法[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào), 2016, 48(10): 51-56.
[7] 邱萬(wàn)彬, 陸婷婷. 基于計(jì)算機(jī)視覺(jué)的三軸氣浮臺(tái)姿態(tài)確定[J]. 計(jì)算機(jī)測(cè)量與控制, 2015, 23(2): 554-557.
[8] 王恩友. 基于模型預(yù)測(cè)控制的氣浮臺(tái)運(yùn)動(dòng)控制研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2017.
[9] 劉宇航, 顧營(yíng)迎, 李昂, 等. 氣浮實(shí)驗(yàn)臺(tái)位姿視覺(jué)測(cè)量方法[J]. 紅外與激光工程, 2017, 46(10): 195-202.
[10] 李召鑫. 基于圖像處理的頭盔空間位置測(cè)量[D]. 杭州: 浙江大學(xué), 2012.
[11] 晏磊, 陳瑞, 孫巖標(biāo). 極坐標(biāo)數(shù)字?jǐn)z影測(cè)量理論與空間信息坐標(biāo)體系初探[J]. 測(cè)繪學(xué)報(bào), 2018, 47(6): 705-721.
[12] 楚萬(wàn)秀. 近景攝影測(cè)量標(biāo)志點(diǎn)設(shè)計(jì)及信息處理研究[D]. 上海: 東華大學(xué), 2008.
[13] 梅文勝, 胡帥朋, 李謀思, 等. 基于普通數(shù)碼相機(jī)的旋轉(zhuǎn)全景攝影測(cè)量方法[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2017, 42(2): 243-249.
[14] 黃桂平. 數(shù)字近景工業(yè)攝影測(cè)量理論、方法與應(yīng)用[M]. 北京: 科學(xué)出版社, 2016.
[15] 單杰. 光束法平差簡(jiǎn)史與概要[J]. 武漢大學(xué)學(xué)報(bào)(信息科學(xué)版), 2018, 43(12): 1797-1810.
A continuous attitude measurement method of three-axis air bearing platform based on close range photogrammetry
ZHANG Jichao,LAN Wenqi,JIN Zelin,YANG Xiongdan,ZHOU Peixi,LIU Jiancheng
(School of Geomatics, Liaoning Technical University, Fuxin, Liaoning 123000, China)
Aiming at the problem that it is reduced for the available load of the air bearing platform due to the large space occupied by the existing measurement methods in the attitude measurement of the three-axis air bearing simulation experiment platform, the paper proposed a continuous attitude measurement method of the three-axis air bearing platform based on close range photogrammetry: the task requirements of the attitude measurement of air flotation platform were analyzed, and the ten parameter model was used to calibrate the high-precise industrial camera; then the artificial mark points were set up in the air flotation platform, and the measured values under the camera calibration system were converted into the true north datum through the platform coordinate system, so as to complete the construction of the attitude measurement platform of the air flotation simulation device and realize the continuous dynamic measurement of the air flotation platform. Experimental result showed that the repeated measurement errors of the proposed method would be better than the designed 10″ tolerance value in the three-axis direction, which could provide an reference for reducing the development risk of spacecraft systems with its feasibility and effectiveness.
three-axis air bearing platform; close range photogrammetry; calibration; true north datum; attitude angle measurement
P228
A
2095-4999(2020)03-0069-07
張繼超,蘭文琦,金澤林,等. 一種基于近景攝影測(cè)量的三軸氣浮臺(tái)連續(xù)姿態(tài)測(cè)量方法[J]. 導(dǎo)航定位學(xué)報(bào), 2020, 8(3): 69-75.(ZHANG Jichao, LAN Wenqi, JIN Zelin, et al. A continuous attitude measurement method of three-axis air bearing platform based on close range photogrammetry[J]. Journal of Navigation and Positioning, 2020, 8(3): 69-75.)
10.16547/j.cnki.10-1096.20200311.
2019-01-09
張繼超(1975—),男,內(nèi)蒙古赤峰人,博士,副教授,研究方向?yàn)檫b感數(shù)據(jù)處理與應(yīng)用。
金澤林(1996—),男,遼寧撫順人,碩士研究生,研究方向?yàn)榻皵z影測(cè)量和工程測(cè)量。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00