船舶清理機器人定位基準位姿測量技術研究
2020-06-19 17:04:18楊其雷郝永志
浙江海洋大學學報(自然科學版) 2020年5期
楊其雷,郝永志,2
(1.浙江國際海運職業技術學院航海工程學院,浙江舟山 316021;2.上海海事大學商船學院,上海 201306)
船舶海水脫硫裝置大多采用濕法噴淋來除去煙氣中的硫元素,以天然海水為吸收劑,將堿液以噴霧的形式噴入到海水中,兩者混合反應后,來脫除煙氣中SO2,從而達到凈化的目的[1]。但是,海水脫硫法會在煙囪內壁附著大量鹽巴,這些鹽巴久而久之會堵塞出煙口從而影響排煙效率,進而影響海水脫硫效果。目前清理鹽巴的主要措施是風吹、水洗、人工鏟除等,經濟代價大,易使設備損壞,且效果不佳。因此,需要采用新型機器人清理煙囪內壁的鹽巴以提高海水脫硫效果。
機器人工作時定位基準位姿的測量精度又是鹽巴清理機器人研發需解決的關鍵技術。機器人定位基準位姿測量在國內外已經進行了大量的研究,在20 世紀80 年代就有學者將數學模型應用到了機器人定位基準位姿測量中,通過在空間平面內選取四個以上已知特征點,根據每一個特征點的選取,計算出攝像機圖像平面與空間平面之間的單應性矩陣,來推算空間平面內的機器人定位基準位姿信息[2];國內對于機器人定位基準位姿測量的研究起步較晚,但是在科研人員的努力和國家的大力支持下,機器人定位基準位姿測量研究已經得到了比較深入的研究[3]。王天宇等[4]利用圖像匹配方法檢測了平面靶標在圖像中的具體坐標,采用固定靶標的特性,求取了位姿的中心點,實驗通過多幅圖像樣本驗證了圖像匹配方法的魯棒性,將靶標控制點的空間和圖像坐標作為輸入,獲取到攝像機與移動物體之間的三維相對位姿,實驗結果表明,該位姿測量系統具有較高的測量精度[4];黃敏高[5]以工業機器人為研究對象,引入了靜態圖像收集算法和空間匹配算法,通過工業試驗得到機器人的定位數據,實驗結果顯示,該系統符合加工自動化的信息數據要求,可以實現空間姿態與工業機器人參數之間的匹配,提升了工業生產的自動化程度。
結合船舶海水脫硫裝置的特點,本文在前人研究的基礎上優化設計了船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿測量系統,以期提升海水脫硫效果。
1 船舶鹽巴清理機器人定位基準位姿測量系統硬件設計
1.1 機器人定位基準位姿跟蹤儀優化設計
機器人定位基準位姿測量系統設計硬件部分由位姿跟蹤儀、控制器、用戶計算機、環境傳感器以及靶鏡等組成[6],見圖1。
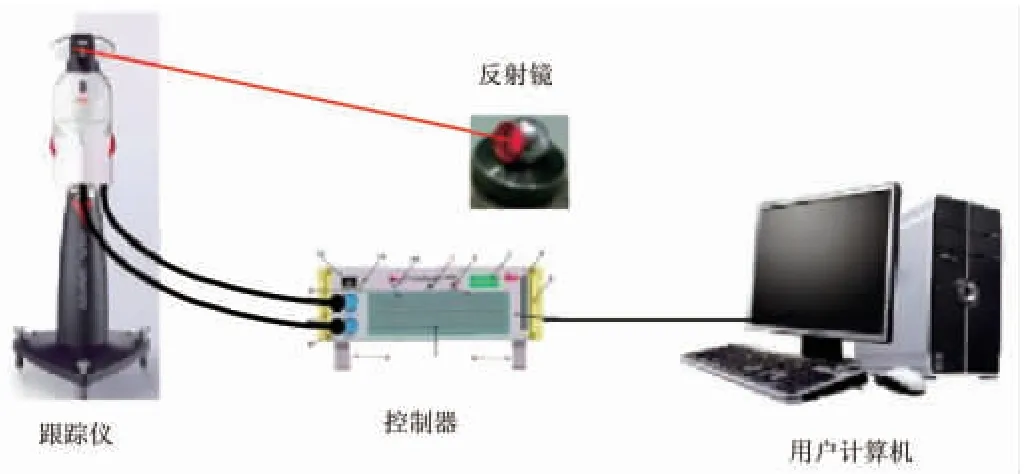
圖1 位姿跟蹤儀測量系統的組成Fig.1 Composition of the measurement system of pose tracker
設計機器人定位基準位姿跟蹤儀是通過位姿跟蹤儀發出的光束信號經過靶鏡的反射與另一路光束發生干涉,根據光束干涉原理[7]可以得到鹽巴清理機器人定位基準位姿跟蹤頭到反射鏡之間的距離。根據鹽巴清理機器人定位基準位姿跟蹤頭2個軸上的角度編碼器,可以得到測量位置相對于鹽巴清理機器人定位基準位姿跟蹤頭的俯仰角與放大角,見圖2。
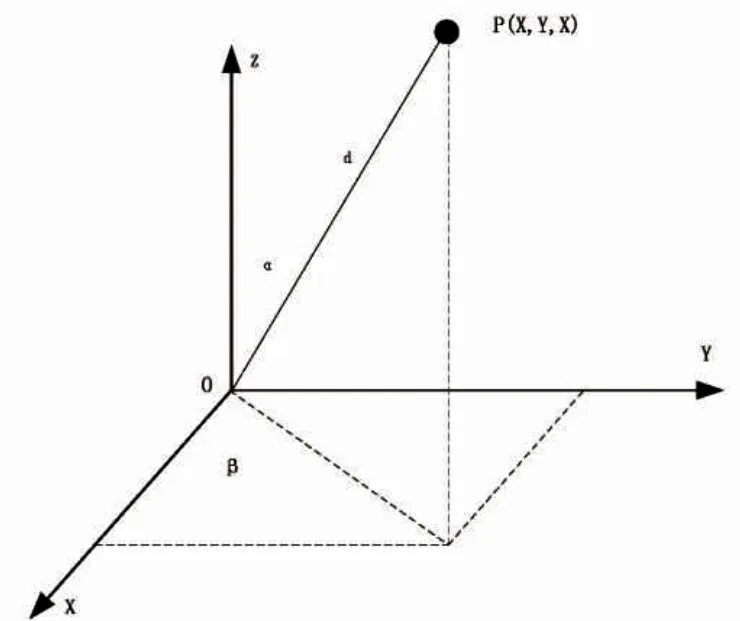
圖2 機器人定位基準位姿跟蹤儀工作原理圖Fig.2 Working principle diagram of the positioning datum pose tracker of salt cleaning robot
根據船舶鹽巴清理機器人定位基準位姿跟蹤儀測頭與定位基準位姿之間的距離和角度,計算出機器人定位基準位姿在跟蹤儀坐標下的直角坐標。
1.2 機器人定位基準位姿測量傳感器設計
機器人定位基準位姿測量傳感器的設計是基于對位姿測量光束飛行時間的測量,換句話說就是從發送位姿測量光束到接收光束的時間間隔與位姿測量傳感器到機器人之間的距離成正比關系[8]。
激光器的光束發射后如果遇到障礙物就會被反射回來,隨后會被測距儀內部的接收器記錄下來。光束被測距儀內部的旋轉光鏡進行偏轉,便于對周圍環境形成一個扇面掃描區域[9]。待測機器人定位基準位姿的輪廓線根據脈沖序列來確定[10],通過串行接口可以測量數據傳送給計算機,從而進行下一步處理。
鹽巴清理機器人定位基準位姿測量傳感器的技術參數設計見表1。
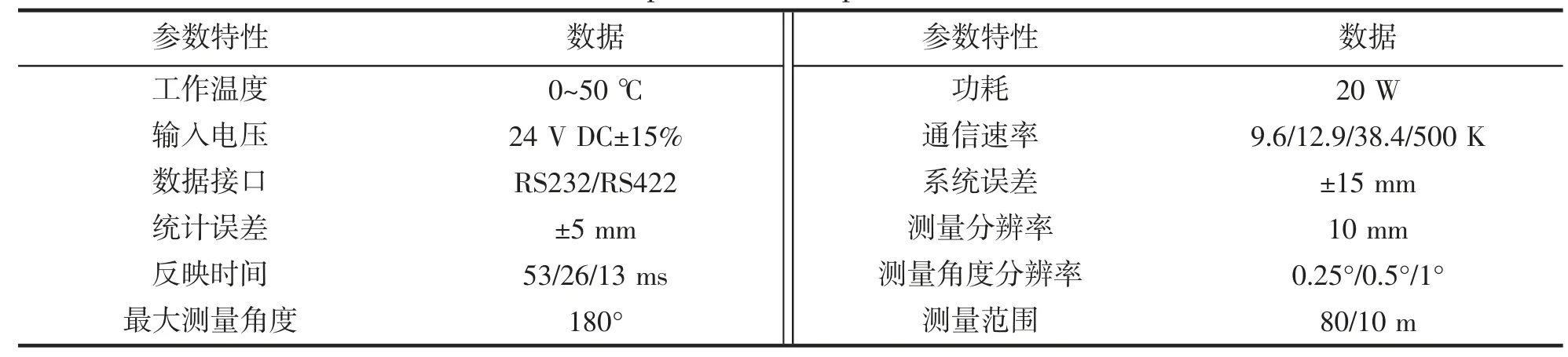
表1 位姿測量傳感器的技術參數Tab.1 Technical parameters of pose measurement sensor
通過位姿測量傳感器的設計,設置位姿測量傳感器的技術參數,實現了系統的硬件設計。
2 船舶鹽巴清理機器人定位基準位姿測量系統軟件設計
2.1 機器人定位基準位姿解算算法設計
根據先驗知識和機器人定位基準位姿特征點圖像坐標,通過精確圖像處理算法得到機器人定位基準位姿特征點像素坐標(u,v),從而經過轉換得到圖像坐標(x,y),根據空間幾何投影約束條件和投影模型[11],求解得到機器人定位基準位姿特征點的空間三維坐標(xci,yci,zci)。
假設機器人定位基準位姿特征點在標靶坐標系和防爆相機坐標系下的坐標為Pbi(xbi,ybi,zbi) 和Pci(xci,yci,zci),因此,兩個坐標系的轉換關系可以表示為:

公式中,旋轉矩陣Rbc和平移矩陣Tbc采用對偶四元數[12]可以將其表示為:

此外假設機器人定位基準位姿特征點在攝像機坐標系下對應的實測值為P~ci,由于機器人定位基準位姿特征點安裝以及定位機器人基準位姿過程中可能存在誤差[13],因此建立了公式(3)的機器人定位基準位姿解算模型,其中,N 表示機器人定位基準位姿特征點數量。

采用對偶四元數來表示公式(3),得到機器人定位基準位姿特征點的目標方程為:

在公式(4)中G1,G2、G3和的計算公式為:
通過求解機器人定位基準位姿特征點的目標方程,得到對偶四元數的實部r 和對偶部分s,從而在標靶坐標系和防爆相機坐標系下,獲得旋轉矩陣Rcb和平移向量Tcb。根據機器人定位基準位姿特征點相對于海水脫硫裝置的坐標轉換關系:

公式中,M40表示機器人定位基準位姿特征點相對于海水脫硫裝置的坐標轉換關系,Mc0表示機器人定位基準位姿特征點到防爆相機坐標系的轉換關系,Mcb表示跟蹤器到標靶坐標系的轉換關系,M4b表示機器人定位基準位姿特征點到標靶的坐標轉換。
根據先驗知識和機器人定位基準位姿特征點圖像坐標,建立了標靶坐標系和防爆相機坐標系的轉換關系,采用對偶四元數建立了機器人定位基準位姿特征點的目標方程,完成鹽巴清理機器人定位基準位姿解算模型的建立。
2.2 測量機器人定位基準位姿測量的實現
在機器人定位基準位姿解算模型的基礎上,通過開發一個機器人定位基準位姿測量程序,來實現機器人定位基準位姿的測量。主要包括獲取機器人定位基準位姿圖像的驅動、預處理、識別靶標位姿解算以及數據顯示等[14]。為了方便調試機器人定位基準位姿測量程序,將灰度圖和深度圖像在上位機中顯示出來,從而查看機器人定位基準位姿到的深度值。
為了準確描述出靶標的位置信息,先確定并選擇坐標系,將其坐標表示為(X,Y,Z)。本文選擇鹽巴清理機器人定位基準位姿的本體坐標系和觀察坐標系來描述靶標的具體位置。在測量機器人定位基準位姿之前,必須先確定相機的畸變參數和內參數,在工作模式下,獲取機器人定位基準位姿數據之后,測量機器人定位基準位姿,具體步驟如下:
1)識別靶標
采用畸變校正和降噪的方式來處理相機采集到的機器人定位基準位姿圖像,利用閾值算法從處理的圖像中篩選靶標,提取靶標的形心坐標,并從深度圖像中提取形心的機器人定位基準位姿深度信息。
2)匹配靶標
利用靶標形心的深度值和坐標、相機的內參矩陣,計算出靶標的三維坐標值,從而求解出靶標的相對距離矩陣[15]。計算物體坐標系下機器人定位基準位姿的相對距離矩陣,將計算得到了2 組相對距離矩陣作為測試程序的輸出,利用退火算法找到靶標的序號對。
3)計算機器人定位基準位姿
將正確匹配的靶標序號對應的三維坐標值作為機器人定位基準位姿測量程序的輸入,利用機器人定位基準位姿解算模型求出旋轉矩陣和位移向量。
根據機器人定位基準位姿測量步驟,設計了機器人定位基準位姿測量流程。
綜上所述,在鹽巴清理機器人定位基準位姿解算模型的基礎上,結合機器人定位基準位姿測量程序設計,完成了系統的軟件設計,實現了機器人定位基準位姿的測量。
3 系統測試
3.1 試驗設計
由于傳感器不能識別鹽巴清理機器人的運動加速度,因此不能適應機器人的高動態行走情況,在此基礎上,通過改進濾波器來增加空速計,從而識別機器人運動加速度的影響。利用Matlab 仿真工具來驗證機器人定位基準位姿測量系統的有效性。仿真試驗結構圖見圖3。
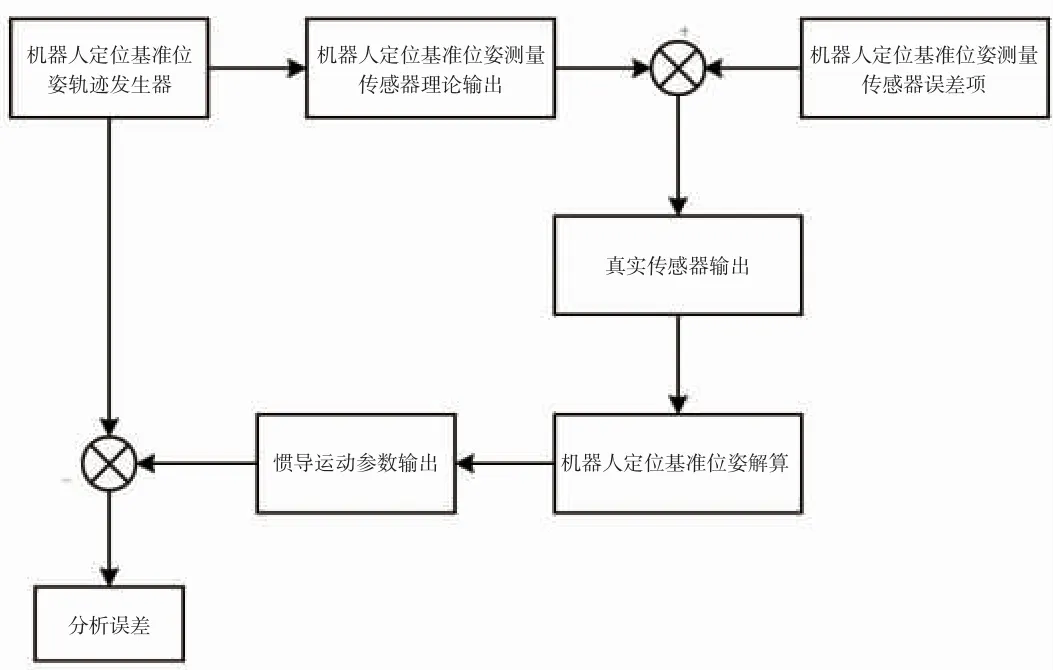
圖3 仿真試驗結構圖Fig.3 Structure diagram of simulation experiment
仿真試驗的鹽巴清理機器人行走參數見表2。

表2 鹽巴清理機器人行走軌跡參數Tab.2 Trajectory parameters of salt cleaning robot
3.2 機器人定位基準位姿平移距離測量誤差試驗
在3.1 試驗設計的基礎上,分別采用文獻[4]的位姿測量系統、文獻[5]的位姿測量系統以及本文提出的位姿測量系統來測量船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿,得到機器人定位基準位姿平移距離測量誤差對比結果,見圖4。
從圖4 的實驗結果可以看出,文獻[4]的位姿測量系統在測量船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿時,由于系統硬件的跟蹤設備精度不足,使得機器人定位基準位姿測量的結果與實際測量產生的誤差達到10%左右,而且還低于實際測量結果;文獻[5]的位姿測量系統由于解算船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿過程中不夠精確,使得機器人定位基準位姿測量的結果與實際測量結果也存在一定誤差,達到4%左右,而本文提出的位姿測量系統建立了船舶鹽巴清理機器人定位基準位姿解算模型,簡化了位姿解算步驟,使機器人定位基準位姿測量結果與實際測量結果之間的誤差較小,在1%以內,從而提機器人定位基準位姿測量的精度。
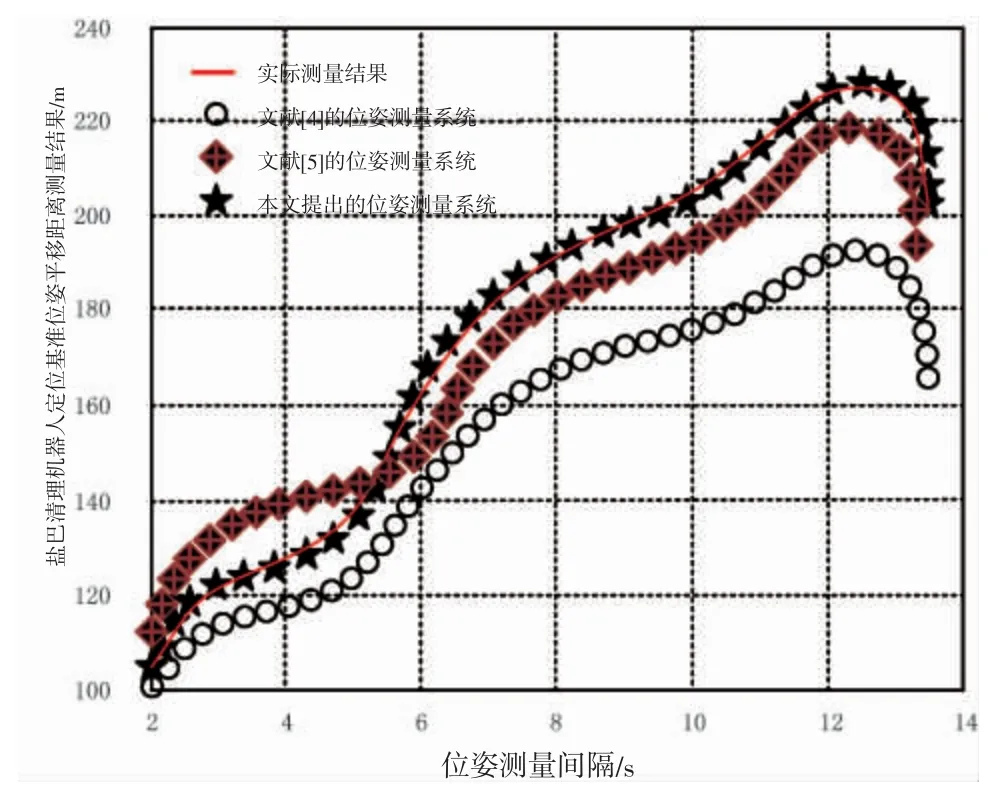
圖4 機器人定位基準位姿平移距離測量誤差對比結果Fig.4 Comparison result of measurement errors for the translation distance of the positioning datum and pose of the salt cleaning robot
3.3 機器人定位基準位姿測量角度誤差試驗
在3.1 試驗設計的基礎上,分別采用文獻[4]的位姿測量系統、文獻[5]的位姿測量系統以及本文提出的位姿測量系統,來測量船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿,得到鹽巴清理機器人定位基準位姿旋轉角度測量誤差對比結果,見圖5。
從圖5 的實驗結果可以看出,文獻[4]和文獻[5]的位姿測量系統由于只進行了識別靶標和匹配靶標中的一步,使得到的船舶鹽巴清理機器人定位基準位姿測量的結果與實際測量結果之間的旋轉角度誤差達到了20%左右,而本文提出的位姿測量系統細化了機器人定位基準位姿的測量步驟,使機器人定位基準位姿測量的結果與實際測量結果之間的誤差在5%以內,從而提高了機器人定位基準位姿測量精度。
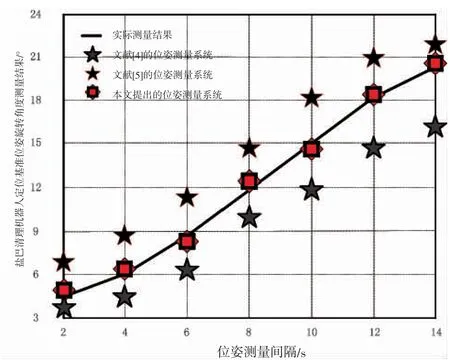
圖5 機器人定位基準位姿旋轉角度測量誤差對比結果Fig.5 Comparison result of measurement errors for the Rotation Angle of the positioning datum and pose of the salt cleaning robot
4 結束語
本文提出了船舶海水脫硫裝置中鹽巴清理機器人定位基準位姿測量系統研究,通過設計機器人定位基準位姿測量系統的硬件部分和軟件部分,完成了機器人定位基準位姿測量系統。仿真結果表明,該位姿測量系統在測量精度方面表現優于傳統方法。但本文方法因未考慮噪聲干擾,為進一步提高測量精度,還需要在未來研究中著重探究深度識別算法和濾波跟蹤算法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45