高速列車受電弓不同姿態下氣動特性分析
2020-06-23 09:00:20劉曉禹王益鶴
科學技術與工程 2020年14期
趙 萌, 劉曉禹, 賈 彥*, 王益鶴
(1.內蒙古工業大學能源與動力工程學院,呼和浩特,010051;2.北京城建亞泰建設集團有限公司,北京 100013)
高速列車獲得動力來源的重要集電原件是安裝在列車頂部的受電弓,由于復雜的結構外形,導致其具有強烈的氣流擾動[1],同時橫風作用下增強了受電弓縱向擾動,甚至會產生嚴重的弓網事故[2]。中外專家學者對高速列車受電弓氣動特性做了大量的分析研究[3-4]。Navik等[4]采用數值模擬與實驗的方法研究受電弓與接觸網之間的受力關系;Song等[5]是在強橫風作用下,對高速列車組件繞流場進行研究;但其中受電弓、轉向架等結構經過簡化,不能夠精細反映列車的真實氣動特性。
受電弓在開口姿態時高速氣流首先繞流滑板及其附件,而在閉姿態時上臂桿尾流流場對滑板及支架產生顯著影響,因此十分有必要對比分析。但是目前中外學者對于不同姿態下受電弓繞流場的分析較少,尤其是在橫風的作用下[5-7]。故針對受電弓以及弓網系統運行狀態,建立模型分析在橫風作用下受電弓開口姿態與閉口姿態運行時的氣動特性,為進一步提高高速列車的安全行駛提供依據。
1 數值模擬方法
1.1 分離渦(DES)方法
數值模擬采用分離渦(detached-eddy simulation,DES)模擬方法,其主要方法是將大渦模擬方法與雷諾時均方法相結合[8]。選取湍流模型為SSTk-ω模型。SSTk-ω模型的輸運方程的表達式[9-10]為
(1)
(2)
1.2 計算方法的驗證
受電弓由各桿件構成,其中上臂、下臂、拉桿、底座等部件均可近似認為是鈍體。
圖1 Ahmed幾何模型Fig.1 The model of Ahmed
Ahmed鈍體繞流現已有較為深入的研究結論[11],為驗證數值模擬方法的準確性,采用DES方法來對Ahmed鈍體進行數值模擬研究[12-13]。
選用的Ahmed模型如圖1所示,其數值模擬的邊界條件為:速度入口,壓力出口;入口速度為60 m/s,且鈍體表面無滑移,計算域和網格的劃分如圖2、圖3所示。
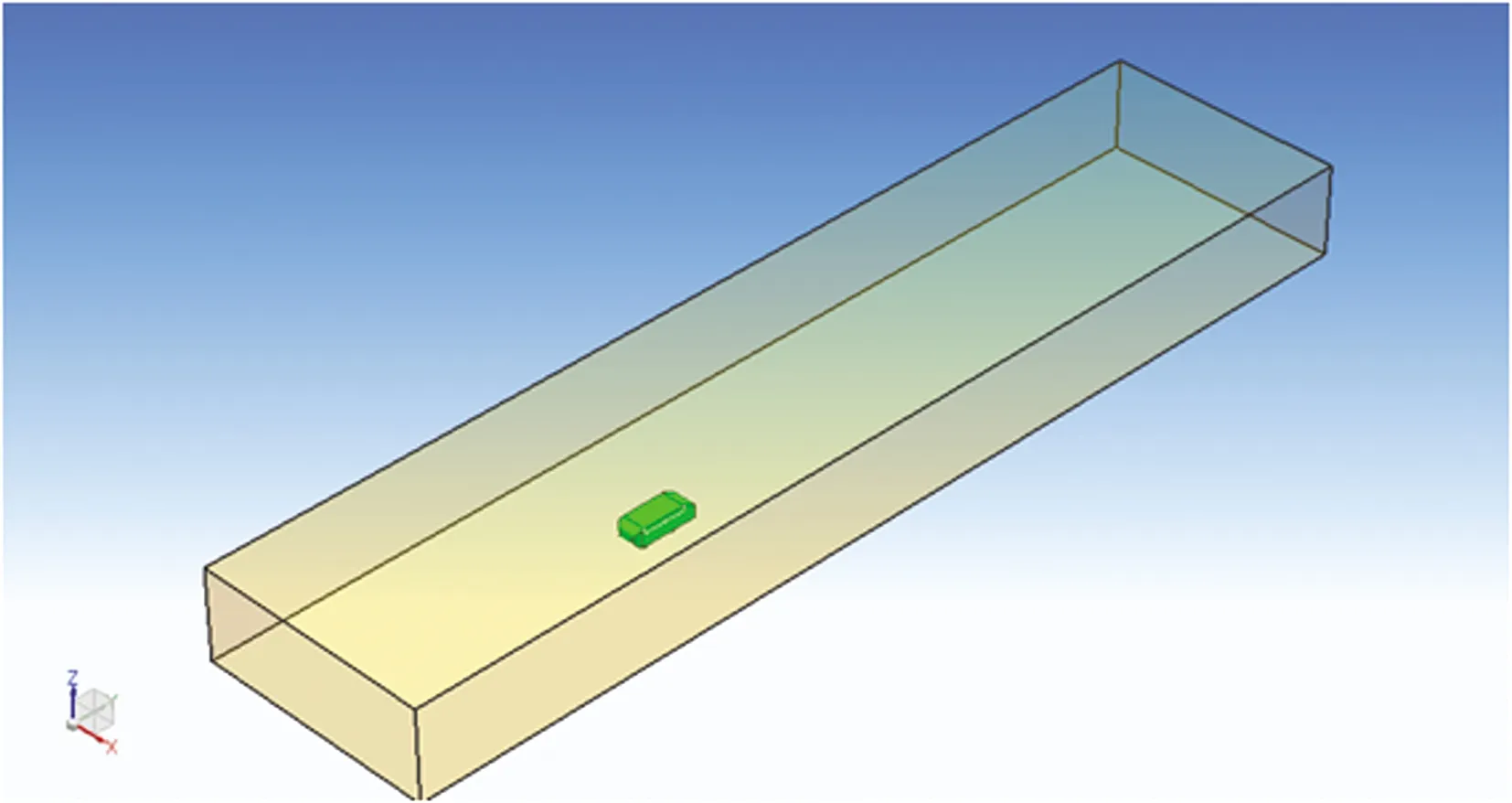
圖2 Ahmed鈍體的計算域Fig.2 Computing domain of Ahmed bluff body
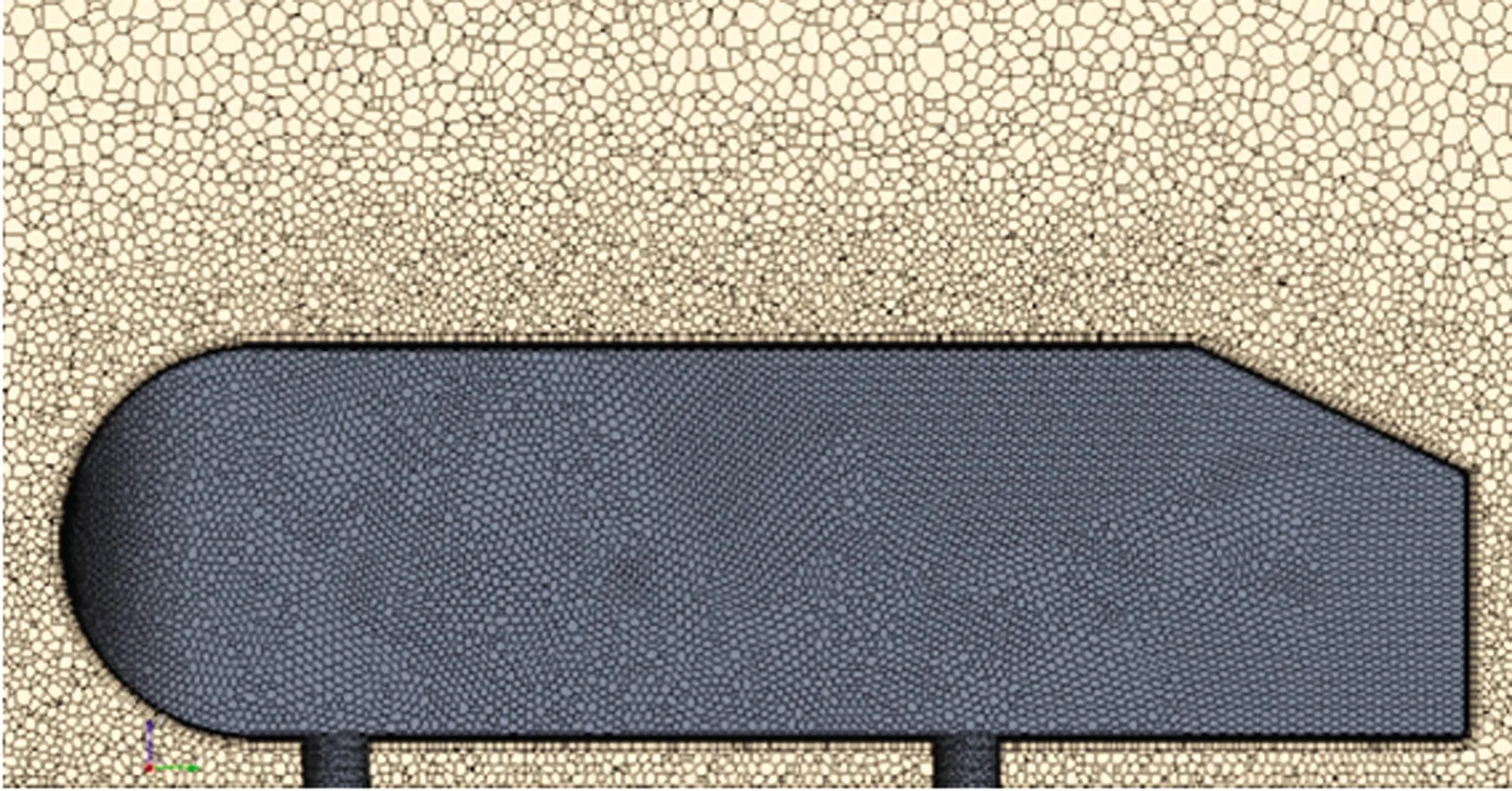
圖3 Ahmed鈍體的網格劃分Fig.3 Meshing of Ahmed bluff body
Ahmed鈍體表面壓力分布、尾部渦量分布如圖4、圖5所示。計算所得阻力系數Cd、摩擦阻力系數Cr分別與文獻[14]中實驗值進行對比研究。其中實驗中阻力系數Cd=0.285,摩擦阻力系數Cr=0.055,本次數值模擬Cd=0.282、Cr=0.054,誤差分別為1.05%、1.82%。由此可見,本文結果與文獻[14]結果誤差在合理的范圍內,說明DES方法的適用性與準確性。

圖4 表面壓力云圖Fig.4 Pressure on buff body
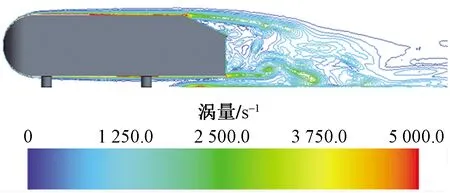
圖5 尾部渦量線圖Fig.5 Vorticity after buff body
2 計算模型和條件
2.1 受電弓模型
受電弓結構復雜,而重點研究的是受電弓主體的繞流場特性,所以對受電弓結構進行適當簡化,如圖6所示。圖7為受電弓不同姿態運行的示意圖。
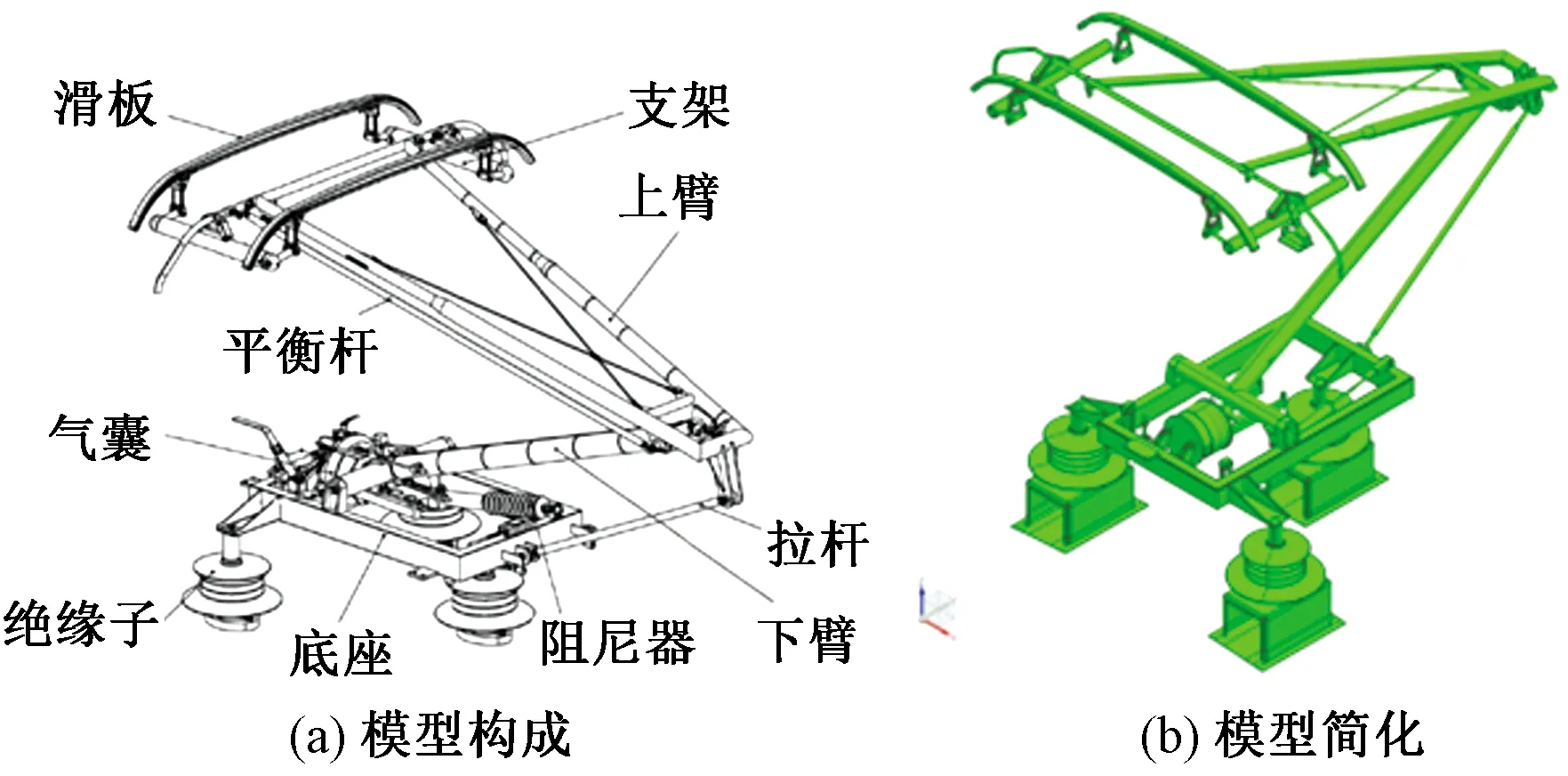
圖6 受電弓模型Fig.6 The composition of the pantograph
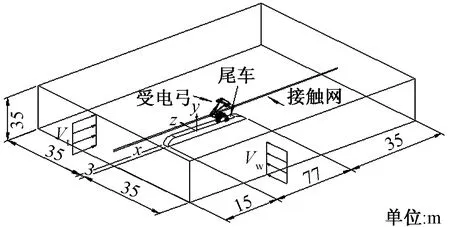
圖7 模型及計算域 Fig.7 Model and calculation domain
2.2 計算域和計算條件
采用1∶1的尺寸建立動車組受電弓-列車-接觸網系統模型,接觸線距地面6 m。受電弓運行時,由于其流場受到列車與網的干擾,因此采用3節車廂編組的列車模型,其中設定受電弓位于列車的中車,計算域如圖8所示。

圖8 受電弓不同姿態下運行示意圖Fig.8 Diagram of pantograph in open and closed operation
采用六面體網格,模型邊界層分為6層,以確保邊界與主流區的網格平滑銜接。在重點研究區域(受電弓附近流場)進行網格加密,網格總數為750萬,網格劃分如圖9所示。邊界條件為入口速度:受電弓運行速度為350 km/h,橫風風速為15 m/s(風向角90°),出口為壓力出口,相對大氣壓0 Pa。

圖9 網格的劃分Fig.9 Mesh generation
3 外流場的非定常特性
3.1 速度場與壓力場的分布規律
相對于受電弓閉口姿態而言,開口姿態工況中速度矢量偏轉集中在弓頭區域,尤其是在弓、網相互接觸的區域后方。下臂附近流場區域內速度矢量有偏轉但無明顯回流,其原因是受到拉桿繞流的影響較小,如圖10、圖11所示。
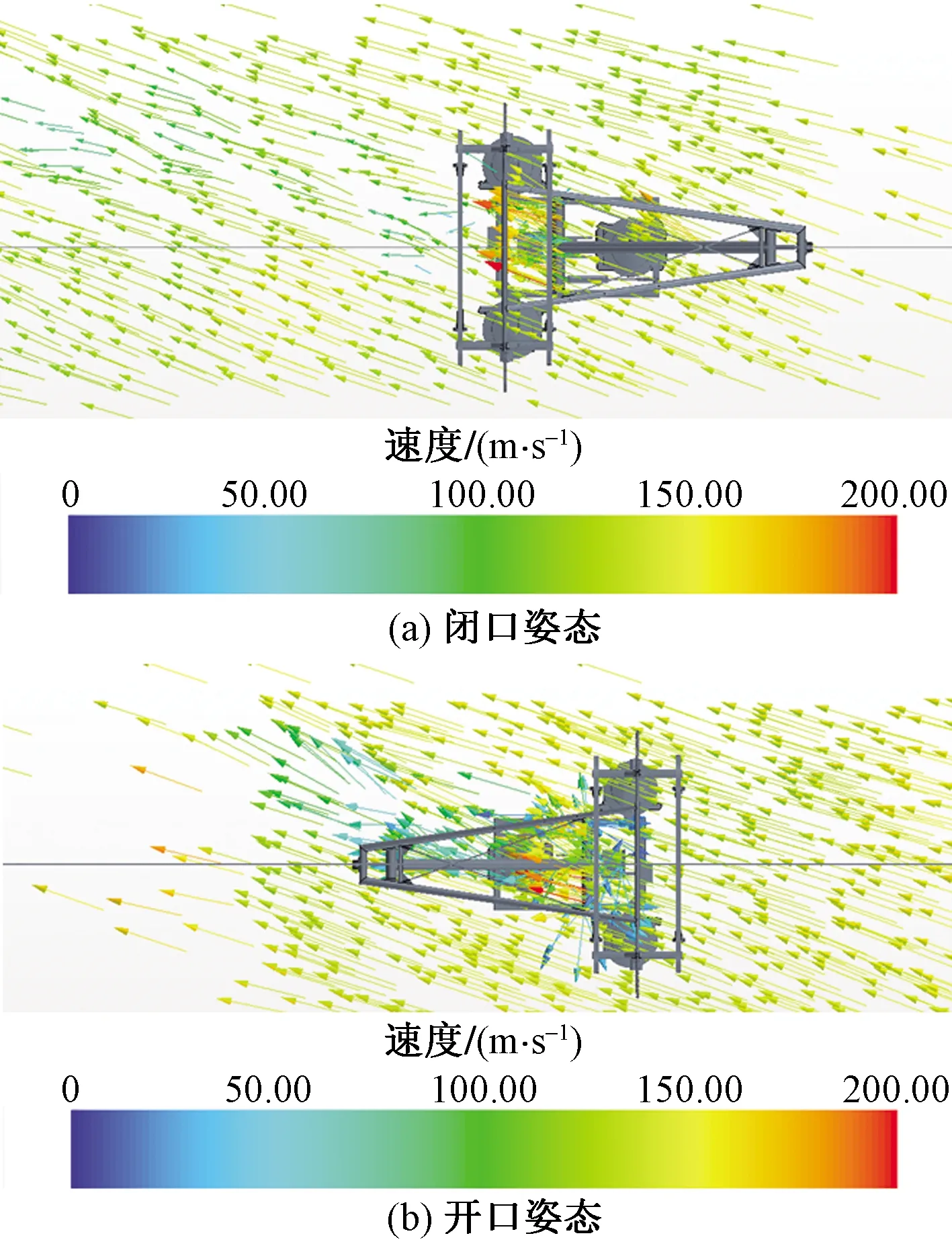
圖11 水平面速度矢量圖Fig.11 Velocity vector on the horizontal plane
開口姿態下,車廂之間連接處與導流板相比,后者將對繞流場造成更大擾動。根據速度矢量圖可得,來流在受電弓底座及下臂底端速度矢量偏轉較小,即開口姿態時受電弓底部區域受到影響較小。
開口姿態下,車廂之間連接處與導流板相比,后者將對繞流場造成更大擾動。根據速度矢量圖可得,來流在受電弓底座及下臂底端速度矢量偏轉較小,即開口姿態時受電弓底部區域受到影響較小。

圖12 速度云圖Fig.12 Velocity on the symmetry plane
圖12所示為受電弓不同運行姿態下的速度云圖。在閉口姿態中,導流板尾流區域對受電弓底座的影響更加顯著,而開口姿態中的低速尾流主要集中在下臂和拉桿的底端。對比不同姿態下繞流場的流線分布(圖13),其中開口姿態對流場擾動較小,大范圍的低速尾流區域主要集中在受電弓與網接觸區域的后方,這是由于受電弓部件之間與接觸網繞流場的疊加效應。由此可得,開口姿態下,滑板與接觸網更容易受來流影響。
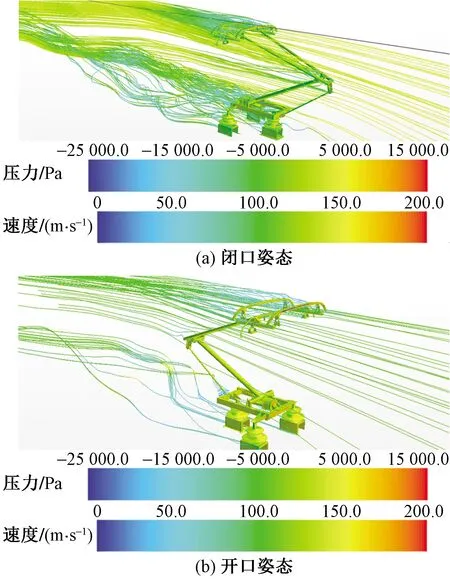
圖13 受電弓表面壓力和流線圖Fig.13 Pressure on the pantograph surface and streamline around the pantograph
3.2 渦量場分布規律
圖14所示為受電弓閉口、開口姿態下的渦量分布。由圖14可見,開口姿態下來流對繞流場的擾動較小,主要擾動區域為弓-網和弓-車接觸區域,其中弓-車接觸區域的擾動主要源自于車廂連接處對來流的影響,拉桿處于下臂的尾流區域內,由圖可見,其尾流區域并沒有對弓-車接觸區域流場產生明顯的影響。
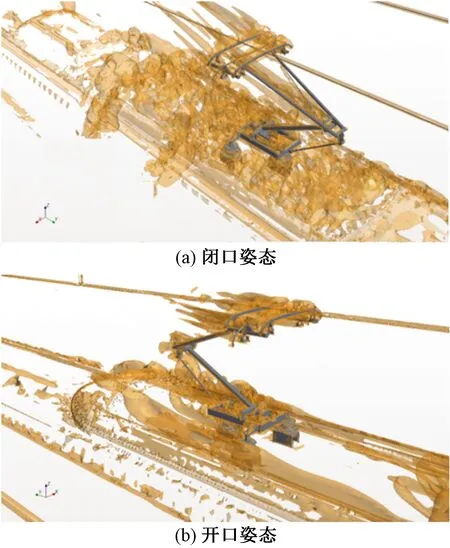
圖14 受電弓等值面圖Fig.14 Iso surface around the pantograph
在開口姿態下,受電弓尾流對導流板附近流場產生顯著影響;而閉口姿態下,由于導流板尾流影響以及受電弓各個部件之間的相互影響,將導致弓-網-車繞流場復雜的疊加效應。
4 氣動載荷特性分析
不同姿態下受電弓繞流場受到導流板以及列車頂部的強烈擾動,從而對受電弓氣動特性產生劇烈影響。因此需要分析受電弓的氣動載荷特性,包括阻力系數Cx、升力系數Cy、側向力系數Cz、傾覆力矩系數Mx、俯仰力矩系數My、側偏力矩系數Mz。
4.1 氣動力特性分析
圖15~圖17所示為受電弓閉口姿態與開口姿態時的Cx、Cy、Cz的時域變化曲線。
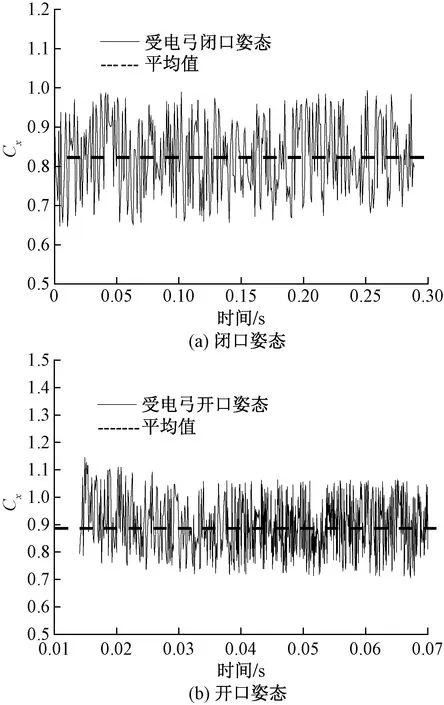
圖15 阻力系數CxFig.15 Drag force coefficient
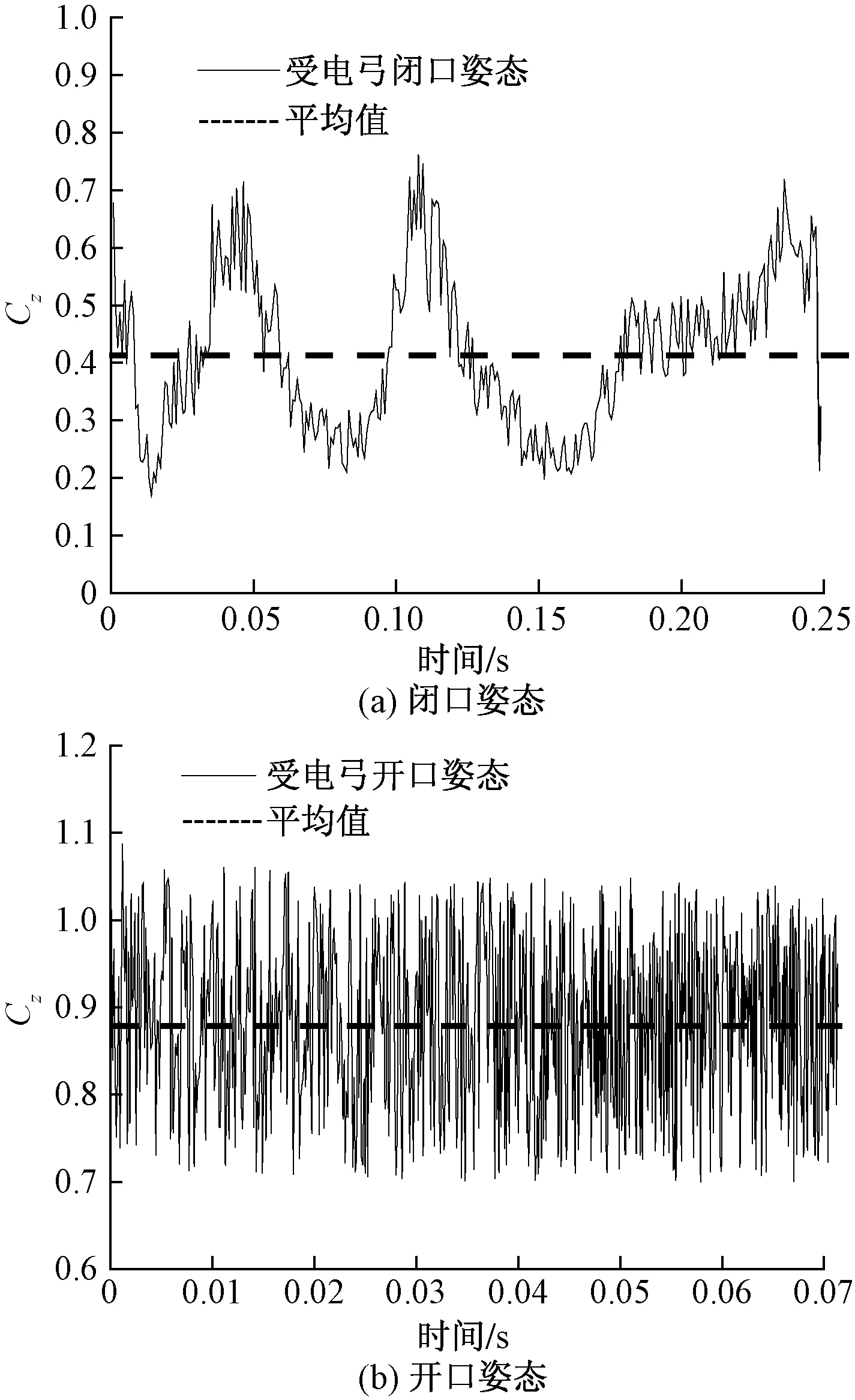
圖16 側向力系數CzFig.16 Lateral force coefficient
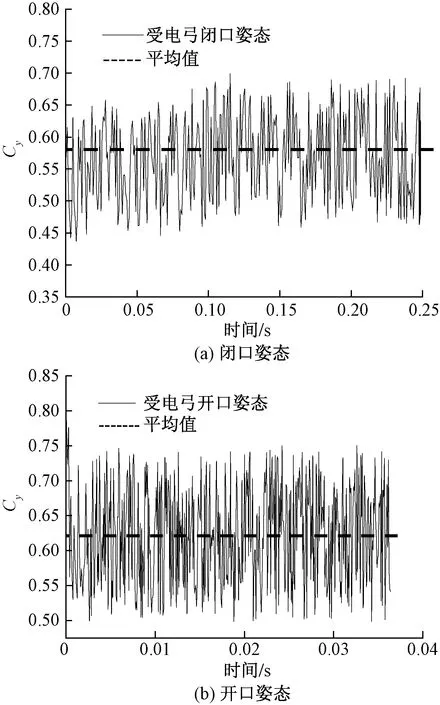
圖17 升力系數CyFig.17 Lift force coefficient
當受電弓以閉口姿態運行時,即Cz完成一個周期的時長小于Cx所需時長。由此可知Cy具有較高的峰值,其原因是列車頂部區域的流場渦結構較為復雜,使Cy振蕩周期的規律性增強,波動值在145%左右。
開口姿態下,Cx的平均值為0.893,其波動值為44.9%,均大于閉口姿態;Cy與Cx趨勢基本相同,但其波動值僅為閉口姿態的30.2%,其峰值相對于閉口姿態增加了43.2%,且完成一個波動所需時間更長。由此可見,高速列車受電弓開口姿態下有更加強烈縱向振動。
4.2 氣動力矩系數的時域特性
圖18~圖20所示為受電弓不同姿態運行時的傾覆力矩系數Mx、俯仰力矩系數My、側偏力矩系數Mz變化規律。
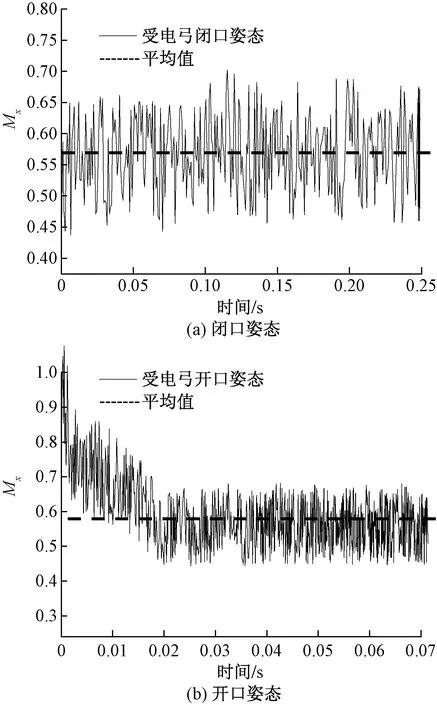
圖18 傾覆力矩系數MxFig.18 Upsetting moment coefficient Mx
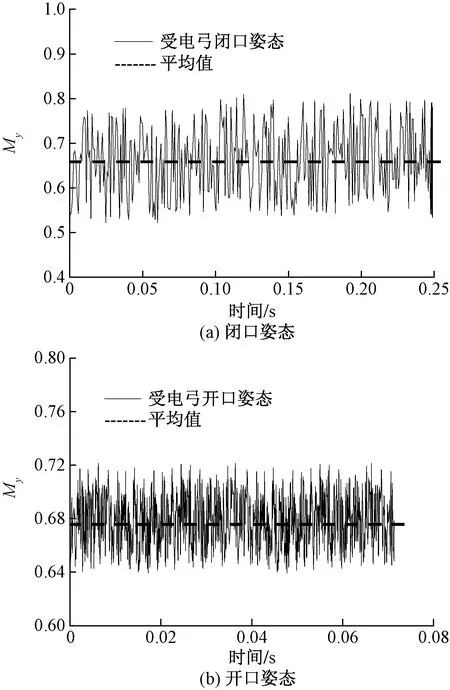
圖19 俯仰力矩系數MyFig. 19 Pitching moment coefficient My
在閉口姿態運行時,Mx和Mz的波動為42%,My為46.5%,其中Mx完成一個周期變化所需的時程最短。相對于閉口姿態,受電弓在開口姿態下Mx隨時間的發展逐漸下降并穩定振蕩在平均值附近,其最值和平均值均較大;My與Mx具有同樣發展趨勢,且周期變化所需時程小于閉口姿態,沿時程變化規律更具周期性且振蕩周期明顯減小。
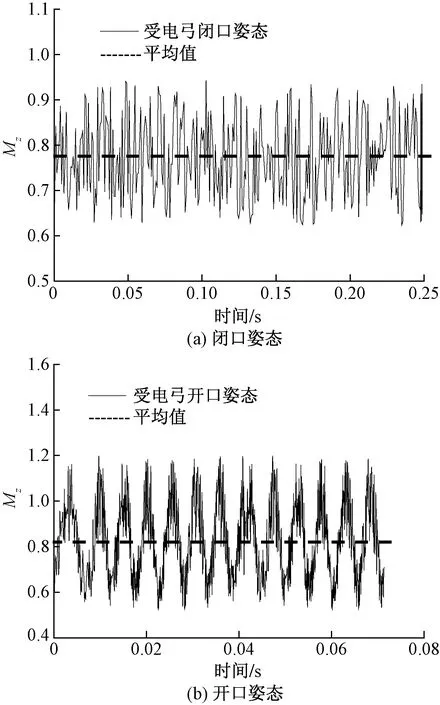
圖20 側偏力矩系數MzFig.20 Deflection moment coefficient Mz
受電弓開口姿態運行時Mz的時程變化規律與閉口姿態基本一致,但波動值較小。
4.3 氣動荷載的頻域特性
表1所示為受電弓不同姿態下氣動特性的頻域變化規律。由此可得,在頻率0~25 Hz的范圍內,氣動力系數迅速衰減,最終穩定于峰值的2.5%~25%,說明橫風效應導致的受電弓非定常氣動荷載主值的頻率降低。
開口姿態下,在0~15 Hz的頻段內,Cx的振幅值減小為峰值的28.4%,Cy減小為44%,Cz減小為29.4%;同理在0~50 Hz的頻段內,Cx減小為峰值的1.5%,Cy減小為7.3%,Cz則是12.8%;由于Cz的頻段較寬,說明相對于受電弓閉口姿態,橫風對開口姿態繞流場特性的作用更加顯著。

表1 不同姿態運行時受電弓氣動荷載頻域特性Table 1 Frequency domain of aerodynamic load of pantograph in open and closed operation

表2 不同姿態運行時受電弓對比Table 2 Comparison of pantograph in different operation
由表1可得,開口姿態運行時,氣動力矩系數的頻域寬度較大,Mx、Mz的減小速度最快,在0~100 Hz的范圍內My減小為最大峰值的43.5%,該頻段內Mz振幅峰值則減小為最大峰值的20%。當受電弓以閉口姿態運行時,My的頻譜比Mx和Mz的要寬。這說明由于橫風的存在,受電弓沿縱向振動,其自身頻率耦合的范圍更寬,其危險性更大。
4.4 對比分析
表2所示為受電弓不同姿態運行時氣動力系數以及力矩系數的各個參數變化。在開口姿態中Cx、Cz的波動值相差3%,Cy的波動值僅為對應閉口姿態的30%,而Cx和Cz的平均值增加了8.3%和10%。由于Cy的平均值較大,結合Cy一個周期對應的時程和振幅對應的頻段分析。
在開口姿態下My、Mz的平均值分別增幅為6.7%和2.3%,其波動量也分別增加了13.6%和7.2%;相比較而言,Mx平均值增加了3%,其波動值也大幅增加為相對工況的1.5倍;Mz的波動值相對較小,但振幅對應的頻段較寬,高頻特性較為明顯,頻率衰減的速度慢。
5 結論
(1)通過對受電弓不同姿態運行時的繞流場研究,可以得出受電弓的底座和下臂部分流場區域在閉口姿態下有強烈擾動;而在開口姿態時,滑板和上臂部分流場區域受到較強擾動,而車廂連接處至受電弓迎流面的區域渦量較小,底座附近的渦量小于閉口姿態。
(2)在閉口姿態下,Cx、Cz的脈動值為46.4%,Cy的脈動值在145%左右,其原因是列車頂部區域的流場渦結構復雜化使Cy振蕩周期的規律性增強;開口姿態下,Cy的波動降低為閉口工況的30.2%,可以得出受電弓在縱向的振動較為強烈,同時氣動力系數對應的頻率范圍明顯大于閉口姿態運行的工況,可見橫風對開口姿態運行時繞流場特性的作用更加顯著。
(3)在閉口姿態運行工況,My的頻譜比Mx和Mz的要寬,說明在橫風作用與受電弓自身頻率耦合的范圍更寬,危險性更大。開口姿態運行時Mx最大值和平均值均大于閉口姿態工況,My完成一個周期變化所需時程小于閉口姿態的工況,開口姿態下氣動力矩系數的頻域寬度大于閉口姿態運行的工況。
