基于遺傳算法優化支持向量機工況識別的燃料電池混合動力汽車能量管理策略
2020-06-23 10:26:50謝金法時佳威李豪迪
科學技術與工程 2020年14期
關鍵詞:優化
趙 勇, 謝金法*, 時佳威, 李豪迪
(1.河南科技大學車輛與交通工程學院,洛陽 471003;2.同濟大學汽車學院,上海 201804)
燃料電池汽車是未來汽車發展的重要方向之一,對大質量、長續駛里程的中大型貨車尤為適用[1-2]。目前,燃料電池與蓄電池的電電混合系統對于貨車是一個有效的解決方案[3-4]。
行駛工況是影響汽車燃料經濟性的重要因素,如果能夠針對不同行駛工況,制定相應的能量管理策略,使得動力分配更加合理,汽車的燃料經濟性也可以隨之進一步提高[5]。目前基于工況識別的混合動力汽車識別方法主要有神經網絡算法識別[6-7]、模糊控制器識別[8]和基于聚類理論的識別[9]。其中,采用神經網絡識別行駛工況時,必須預先提供大量訓練數據,但是具備大量樣本數據在實際操作中較為困難,所以很難得到較高的識別準確率;而模糊識別,由于其參數主要根據專家經驗設置,主觀性較強,不易得到較高識別精度;聚類算法識別時,輸入參數的個數和聚類中心初始值的選定均會對識別結果產生較大影響,不利于識別準確率的穩定性。因此,提高汽車運行工況的識別精度和穩定性,并建立一種滿足燃料電池混合動力汽車(fuel cell hybrid vehicle, FCHV)不同運行工況的能量管理策略越來越重要。
針對燃料電池混合動力貨車,以中國重型商用車行駛工況-貨車工況(China heavy-duty commercial vehicle test cycle-truck, CHTC-HT)中高速、市郊和市區3種工況代表車輛的3種行駛工況作為仿真工況,采用遺傳算法優化支持向量機(genetic algorithm-support vector machine,GA-SVM)識別算法,建立最優的行駛工況識別模型,針對市區、市郊和高速公路工況分別設計模糊能量管理策略,并采用粒子群算法優化其隸屬函數,從而使其具有更好的工況適應性,以達到降低氫耗量并延長蓄電池壽命的目的。
1 FCHV動力系統結構及整車參數
以某FCHV為研究對象,采用質子交換膜燃料電池(proton exchange membrane fuel cell,PEMFC)與蓄電池的電電混合系統,動力系統拓撲結構如圖1所示,整車主要參數如表1所示。
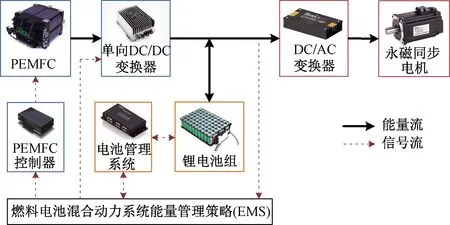
圖1 FCHV動力系統拓撲結構Fig.1 Topological structure of FCHV power system
2 基于SVM的工況識別
2.1 3種典型工況的選擇
根據最新發布的CHTC-HT,包含市區、市郊和高速公路3種工況,該工況是針對中國實際道路狀況開發的,較好地反映了中國貨車的實際運行工況。選定CHTC-HT循環工況中的3種典型工況作為仿真道路行駛工況:工況1為市區主干道城市工況;工況2為市郊公路上中高速行駛的公路工況;工況3為高速公路上高速行駛的高速公路工況。特征工況如圖2所示。
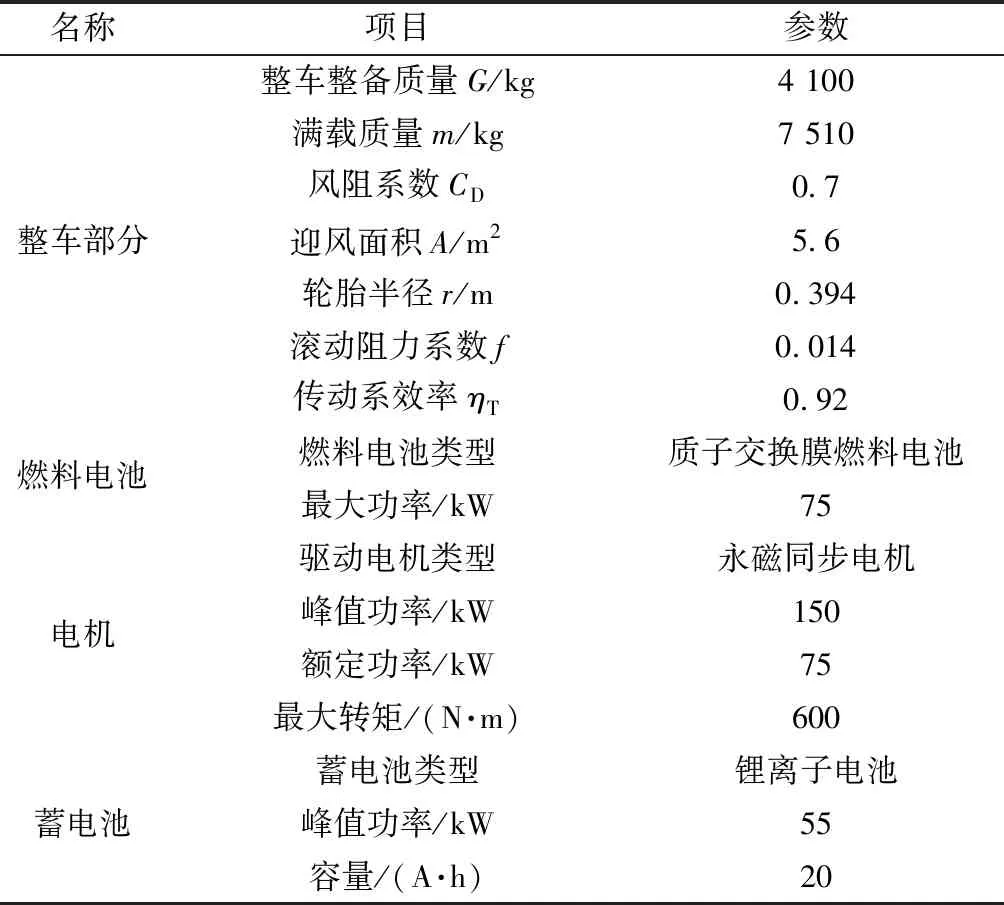
表1 整車主要參數
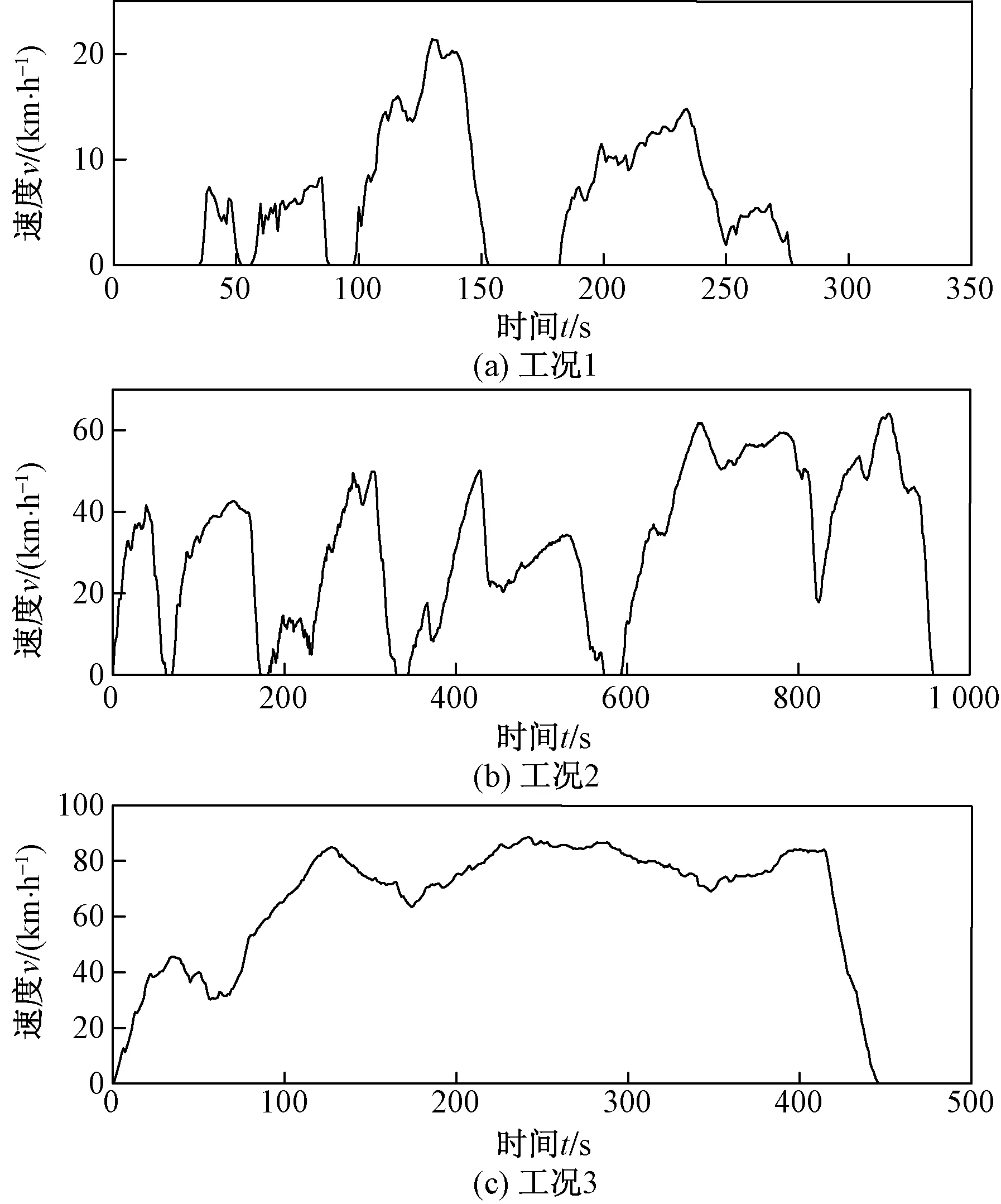
圖2 市區、市郊和高速公路工況Fig.2 Urban, suburban and expressway conditions
工況的特征參數直接反映了循環工況的特征,由于工況特征選取過多會造成計算量變大,影響識別速度,而選取過少,會使得工況表述不準確,影響識別精度。所以在滿足選取的特征參數能涵蓋此循環工況大部分特征的前提下,工況特征參數個數選取不宜過多或過少。根據以上原則及前人的研究成果,選取最能代表循環工況特征的3個參數,即最高速度、平均速度、怠速時間比例,作為評價所研究工況的變量,3種代表工況的特征參數如表2所示。
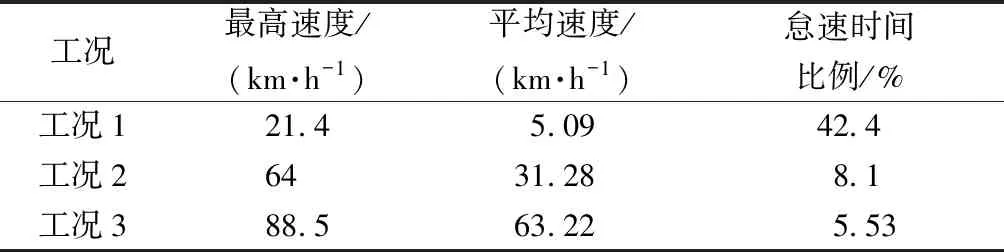
表2 行駛工況特征參數
為使樣本數量充足,將道路工況分成片段,每個片段為60 s,并且可以疊加,疊加選擇情況如圖3所示,1~15代表工況片段的序號。每類行駛工況抽取120個樣本,共計360個樣本。
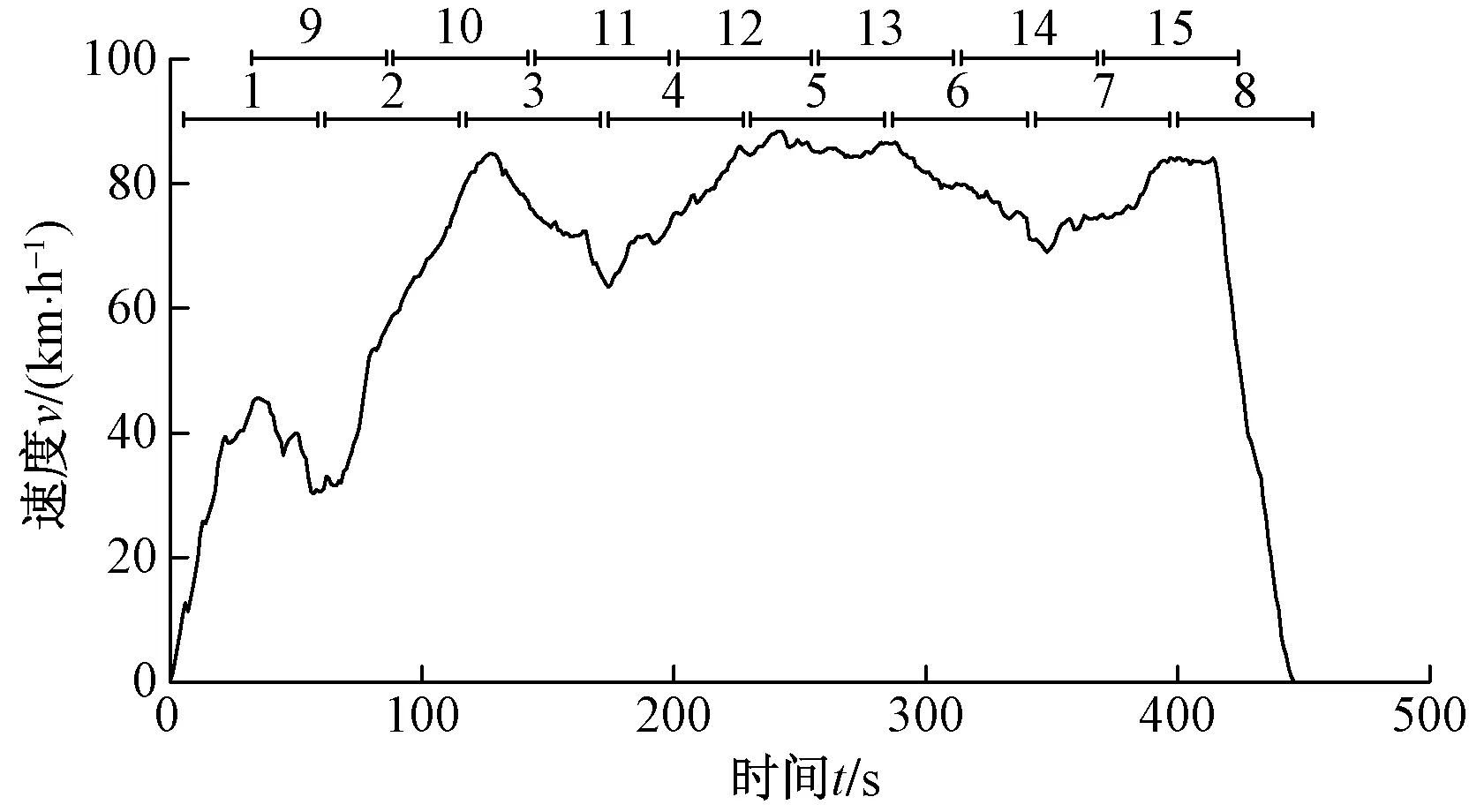
圖3 道路工況分段示意圖(工況3)Fig.3 Segmentation diagram of road working condition (working condition 3)
2.2 遺傳算法優化的SVM識別算法
支持向量機(support vector machine,SVM)是基于統計學習理論發展而來的,通過訓練學習樣本來建立高精度分類模型,對于有限個樣本數據,支持向量機相比于其他機器學習方法有著更高的精度,目前,該模型還較少運用到汽車行駛工況識別中,現采用支持向量機作為行駛工況的識別算法。
采用廣泛使用的高斯徑向基核函數作為支持向量機算法的核函數,懲罰因子C和參數g(RBF核函數中的方差)是影響識別精度的兩個重要參數。如果參數選擇不合理,識別模型可能出現過度擬合或擬合不夠的現象,從而對識別準確率造成負面影響,所以有必要對這兩個參數進行選擇,以達到更高的識別準確率。
遺傳算法由于優化時具有較強的魯棒性和全局搜索能力,因此被廣泛應用。采用遺傳算法優化支持向量機(GA-SVM)算法,尋找最佳的C和g,以獲得更高的識別精度。從而改善傳統交叉驗證方法優化時計算繁瑣、識別精度低的問題。GA-SVM算法流程如圖4所示。
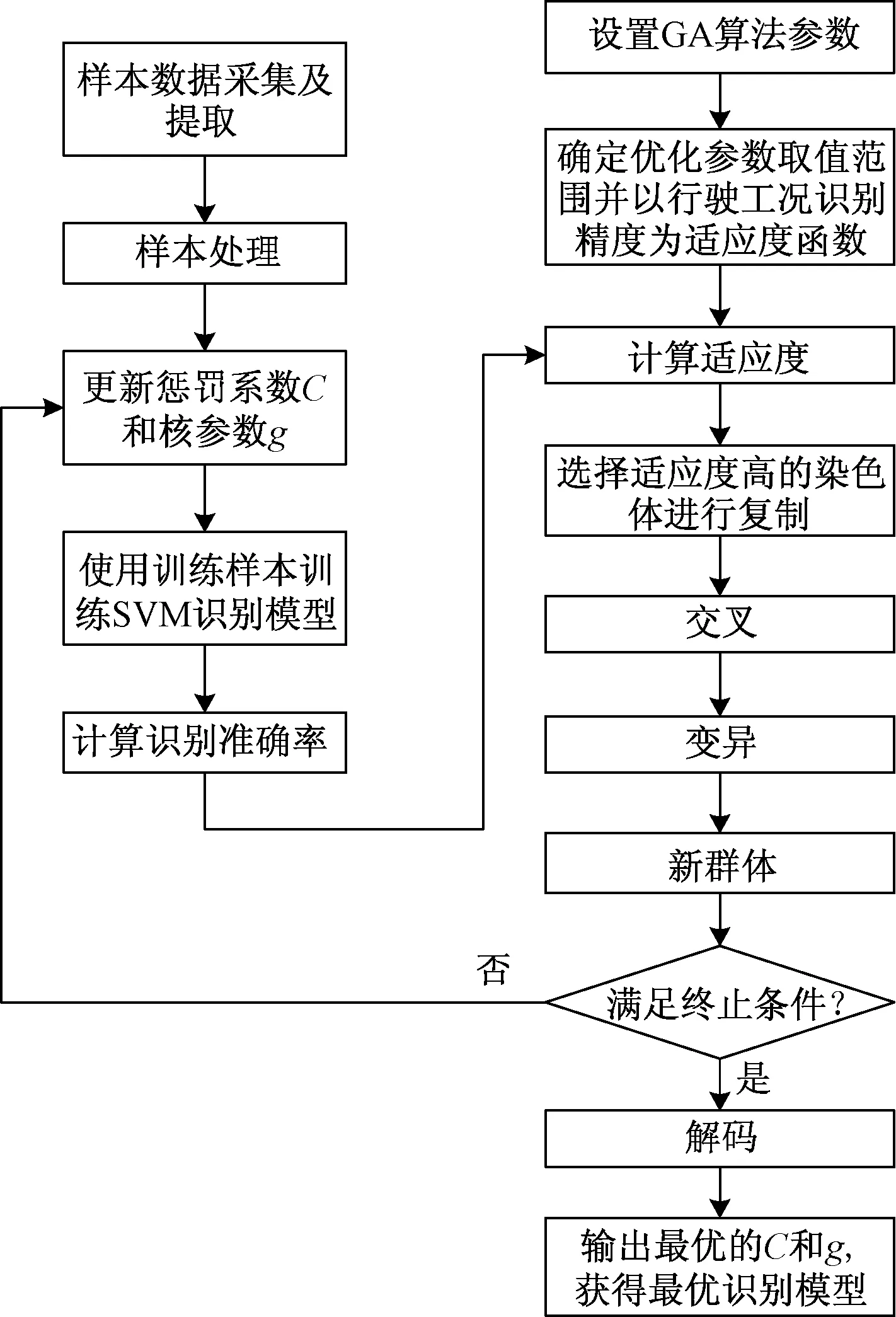
圖4 GA-SVM算法流程Fig.4 Flow chart of GA-SVM algorithm
對選取的3種典型工況以最高速度、平均速度、怠速時間比例3個特征參數作為GA-SVM算法的輸入參數,識別出的工況類型作為輸出參數。為不失一般性,對于每種工況,在采集的特征樣本中隨機抽取90個作為訓練集,剩余的30個作為測試集,建立識別模型,驗證識別模型的精度。遺傳算法參數設置如表3所示。
分別使用交叉驗證方法和遺傳算法對SVM行駛工況識別算法進行優化,獲得其對應的最佳參數C和g,比較其優化后的識別精度,以驗證遺傳算法優化的優越性。結果表明,GA算法中,經過 100 次迭代,尋得最優粒子時的識別精度為 95.384 6%,對應的最優參數C=11.013 0,g=2.589 2。而交叉驗證方法識別精度最高為89.230 8%,對應的最優參數C=73.516 7,g=1.319 5。由此可見,基于GA-SVM 算法的行駛工況識別精度相對于傳統算法優化提高了6.153 8%。
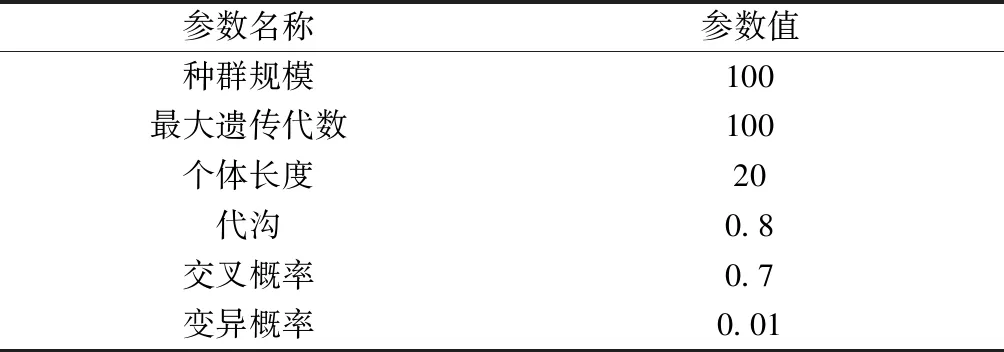
表3 遺傳算法參數設置
2.3 識別周期對行駛工況識別精度的影響
由于識別周期(辨識駕駛模式的歷史時間長度)對工況識別的準確率會產生影響[10],為了尋找識別準確率更高的識別周期,基于MATLAB平臺編寫工況識別程序,提取循環工況特征參數,隨機生成訓練集及測試集,分別以識別周期T為30、60、90、120、150 s,采用遺傳算法進行參數尋優,比較優化后不同識別周期下測試集的識別正確率。
通過遺傳算法對參數C和g尋優,識別結果如表4所示。當識別周期為30 s時,由于樣本長度較短,不能很好地反映工況特征,識別正確率較低,當識別周期為60 s及以上時,識別正確率均保持在較高水平,理論上都可以滿足工況識別的要求。
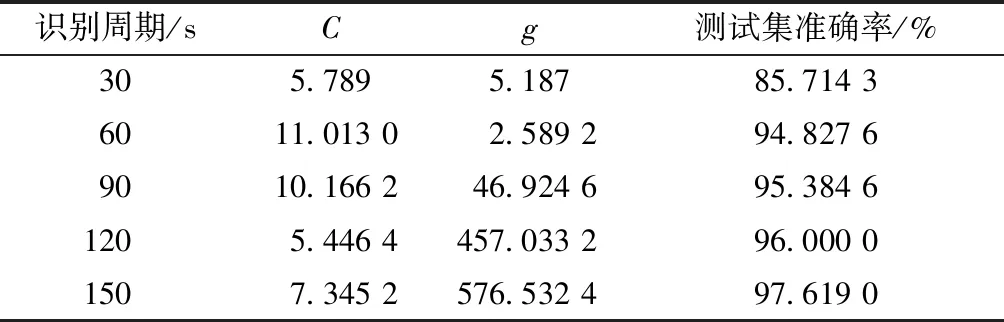
表4 不同識別周期的測試集識別準確率
由于在參數尋優過程中,采集的樣本均為確定工況的數據,不存在工況變換交叉區域的工況數據,且不考慮由于采樣周期引起的識別結果滯后現象;而實際識別系統是采用歷史數據來預測下一段工況的分類,故在實際工況識別中,識別結果將會與實際工況產生一個識別周期的滯后時間,且在工況變換交叉區域的采樣數據為混合工況信息,會導致樣本信息不能完全代表某一工況,所以在實際工況識別應用中,除了考慮SVM測試集的準確率,還應結合實際測試工況進行進一步驗證。
從上述3個類別的工況中,隨機選取若干典型工況組合形成一個大的測試工況“市區-市區-市郊-高速-市郊-市區”,分別以60、90、120、150 s為識別周期,進行識別。識別結果如圖5所示。
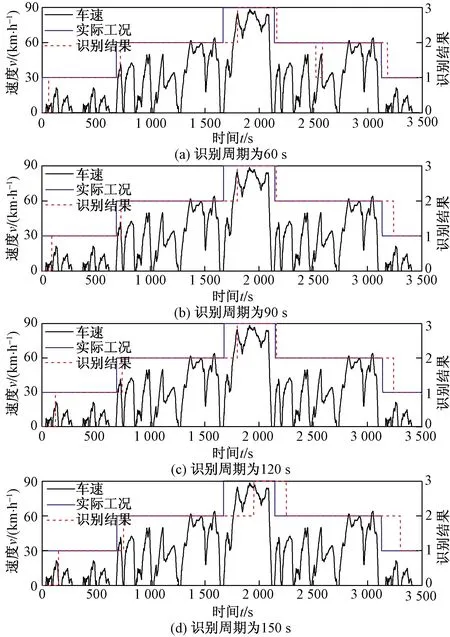
圖5 測試工況在不同識別周期下的識別結果Fig.5 Recognition results of test conditions under different recognition cycles
由圖5可知,不同識別周期下大致都可識別出其工況,但是4種識別周期的識別結果相對于實際工況均有一定程度的滯后,隨著識別周期的增大,滯后越來越明顯,從這個層面來看,識別周期越小越好。由于60 s時識別周期較小,包含的信息較少,無法很好覆蓋該工況特征,在2 500 s處出現了較為明顯的錯誤,會導致不必要的工況切換;在1 600~1 800 s,4種識別周期下都出現較明顯的識別錯誤。通過分析可知,該階段為工況2和工況3變換階段,且工況3起始的速度、加速度等特征值與工況2相近,兩者對應的能量管理策略最優參數差距不大。識別周期為150 s時,由于其識別周期過長,滯后效應更加明顯,識別錯誤時間更長。
綜合以上分析,當識別周期為90 s和120 s時,識別工況與實際工況的契合度最高,但是由于90 s時產生的滯后較120 s時短,識別結果更接近實際工況,因此采用90 s作為工況識別的識別周期,此時C取10.166 2,g取46.924 6。
3 模糊控制器設計及優化
3.1 基于工況識別的能量管理策略
由于市區、公路、高速公路工況燃料電池貨車的需求功率差別較大,無工況識別的能量管理策略在不同工況下采取同一能量管理策略,不能針對不同工況達到自適應控制的效果,故針對市區、公路、高速公路工況分別設計對應的能量管理策略,并與GA-SVM工況識別模塊結合,在不同工況下動態選擇對應工況的能量管理策略,將會達到更好的控制效果。工況識別能量管理策略示意圖如圖6所示。
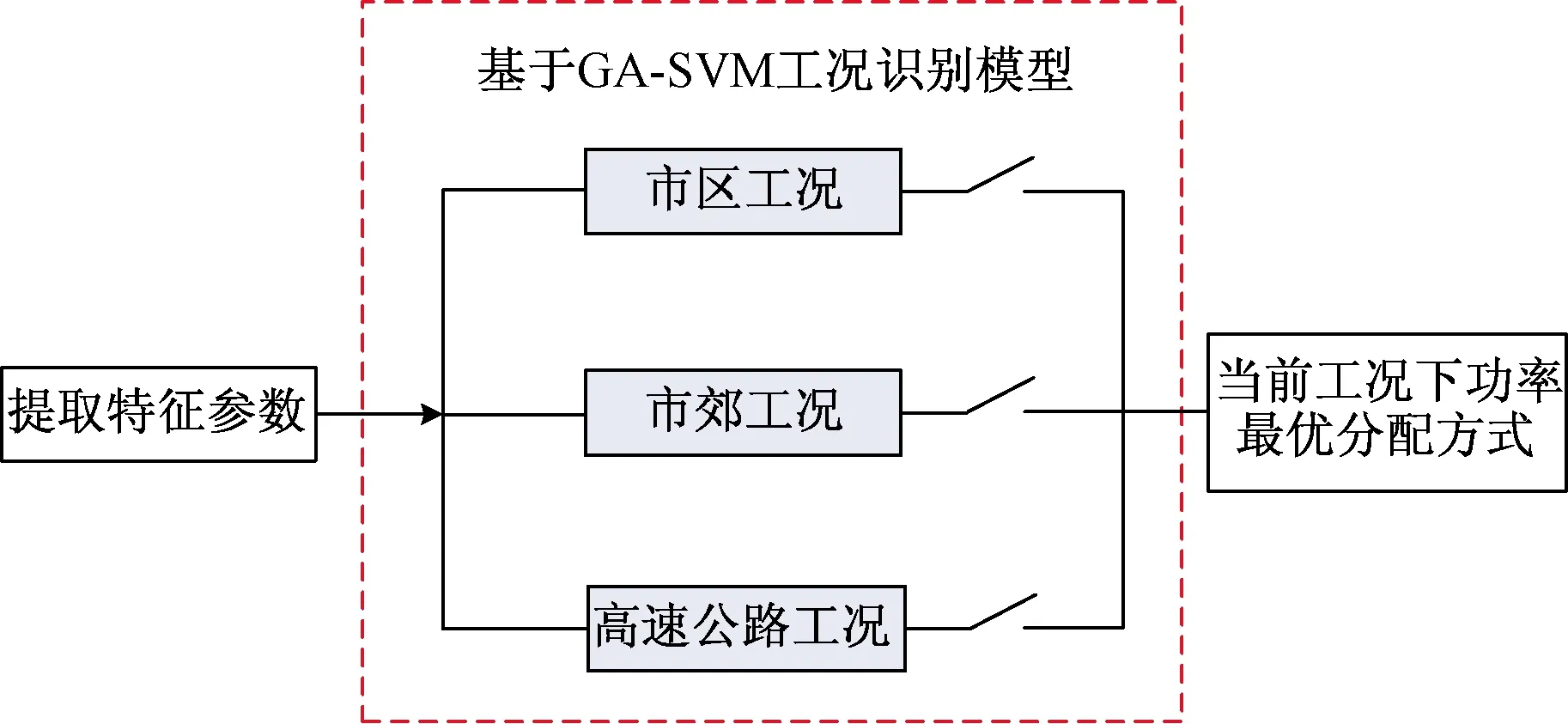
圖6 工況識別能量管理策略示意圖Fig.6 Schematic diagram of energy management strategy for condition identification
3.2 模糊控制器設計
能量管理策略的目的是保證動力系統不同動力源在整車需求功率和蓄電池電池荷電狀態(battery state of charge,SOC)處于不同狀態時,合理分配其功率輸出,使得燃料電池氫氣消耗量更低,蓄電池SOC避免劇烈波動。其輸入輸出量之間的關系是非線性的,難以建立精確的數學模型,而模糊控制以其較高的自適應性、良好的魯棒性,適用于燃料電池混合動力系統的能量管理策略。
本文研究的PEMFC的效率圖如圖7所示。為了氫耗量較低,應使質子交換膜燃料電池系統盡可能在其高效率區間運行,其高效率區間為[5 kW,65 kW]。
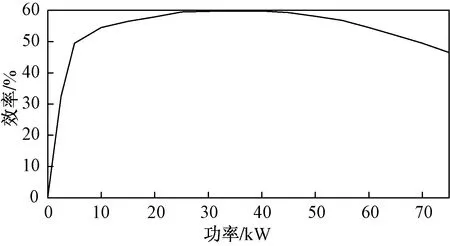
圖7 PEMFC效率圖Fig.7 Efficiency diagram of PEMFC
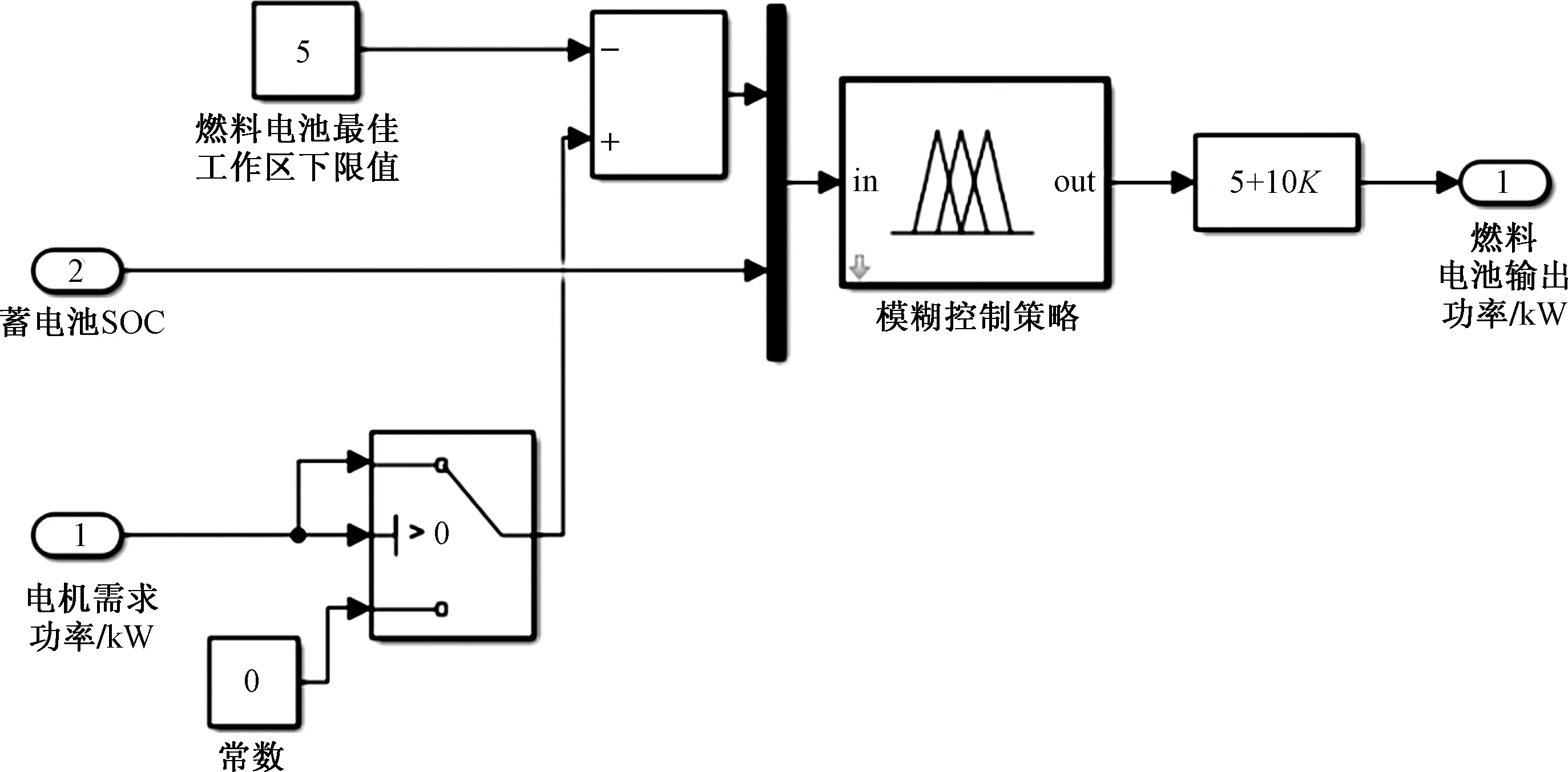
圖8 市區工況能量管理策略模型Fig.8 Energy management strategy model for urban conditions
為防止蓄電池過充與過放,且長時間保證整車較高的動力性能,確定蓄電池組的SOC的合理充放電范圍為[40%,80%]。
模糊控制器以蓄電池SOC、電機需求功率與燃料電池高效工作區間下限值(5 kW)的差值ΔP為輸入量;以比例系數K為輸出量。在市區運行工況下,由于電機需求功率絕大部分不大于15 kW,故燃料電池輸出的最大功率可設定為15 kW,即燃料電池的輸出功率Pfc≤15 kW,Pfc=5+10K,K∈[0,1]。市區工況能量管理策略模型如圖8所示。
模糊控制隸屬函數如圖9所示,其中VS表示非常小;S表示較小;M 表示適中;B表示較大;VB表示非常大。模糊規則如表5所示。
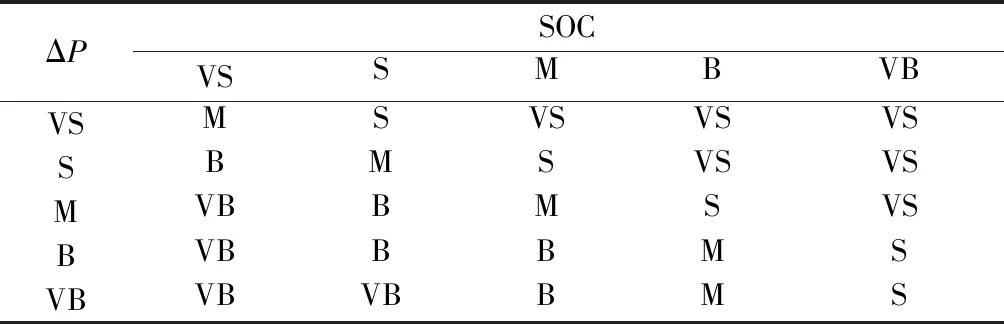
表5 模糊控制規則
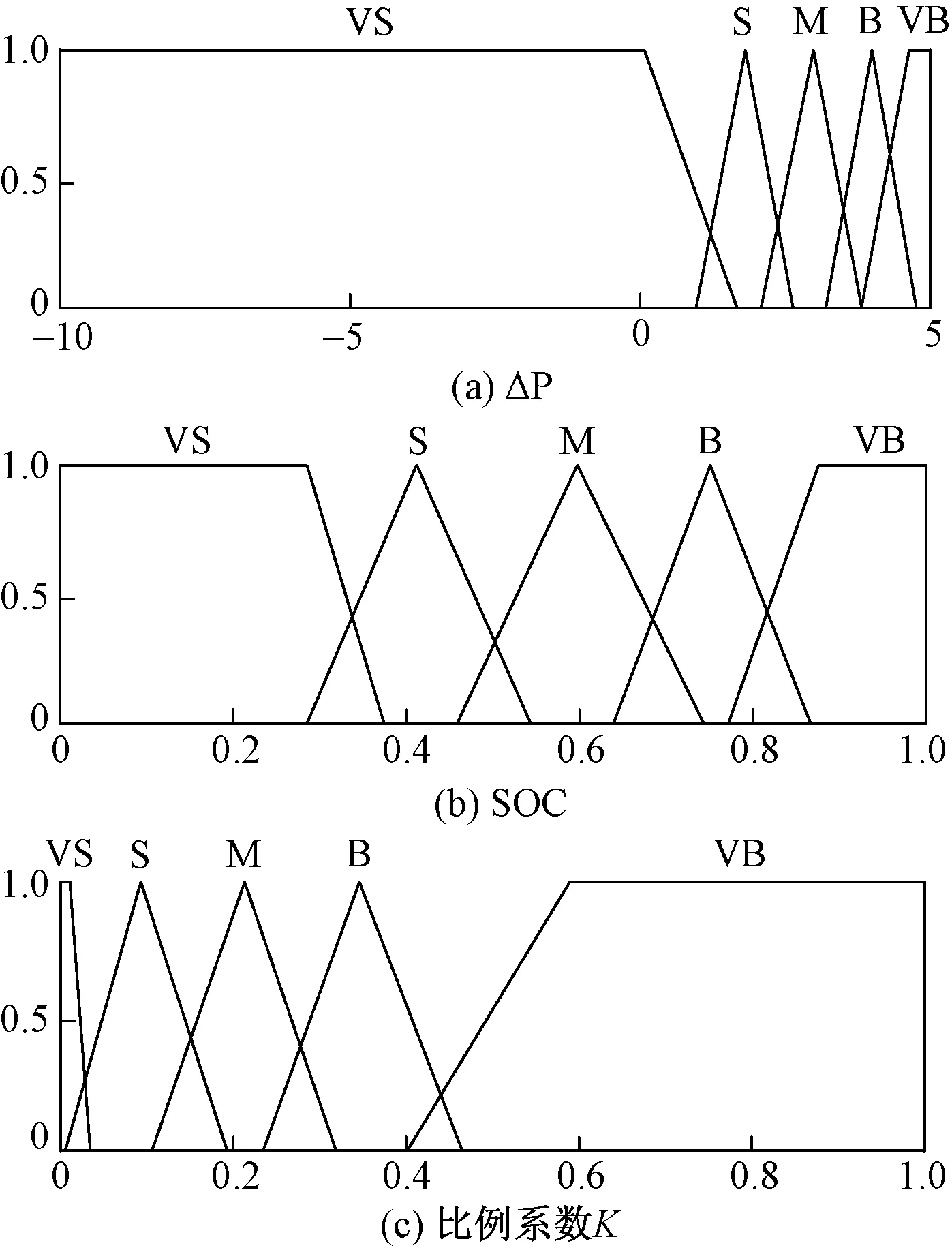
圖9 模糊控制隸屬函數Fig.9 Fuzzy control membership function
在市郊運行工況下,電機需求功率范圍為[0,45 kW],在高速公路運行工況下,電機需求功率范圍為[0,80 kW],隸屬度函數及模糊規則制定與市區工況下類似,不再贅述。
3.3 隸屬函數參數優化
依靠經驗設計的模糊控制器帶有較大的主觀性,很難獲得最優的性能,故需對其參數進行優化。粒子群算法具有搜索速度快、參數設置簡單等優點,對于隸屬函數參數較多且非線性尋優的問題較為適用。所以采用粒子群算法對隸屬函數進行離線參數尋優,并將優化后的模糊控制器應用于FCHV能量管理策略中。
優化目標是在保證汽車動力性的前提下,使得整車的等效氫耗量和蓄電池SOC變化量最小,優化目標函數為
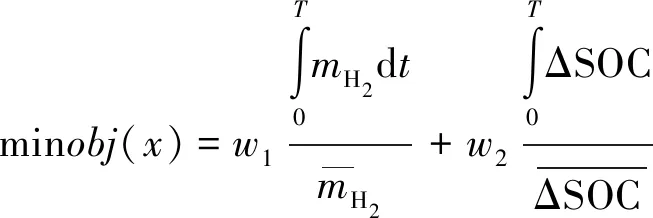
(1)


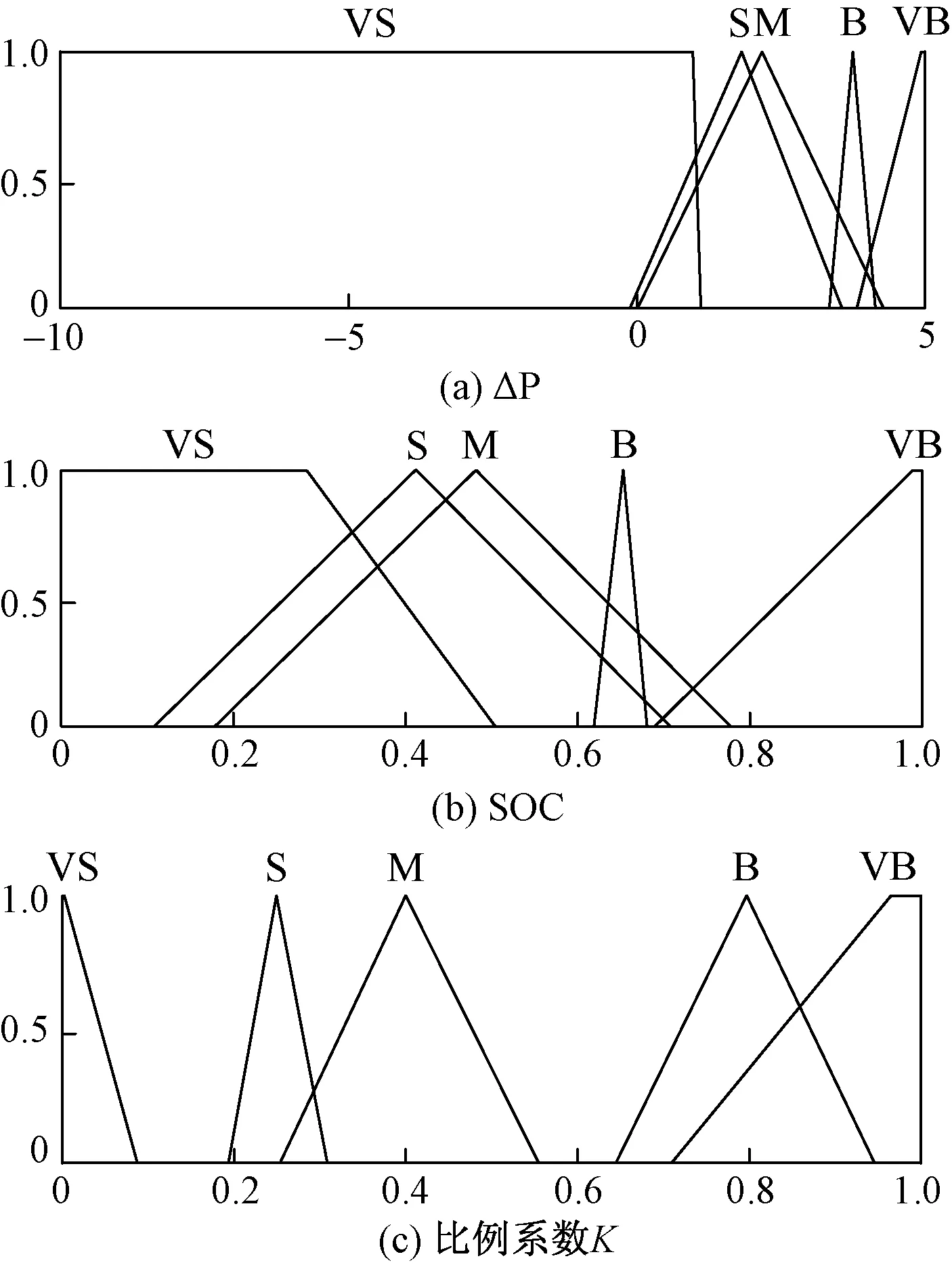
圖10 市區模糊控制器隸屬函數優化結果Fig.10 Membership function optimization results of urban fuzzy controller
4 建模與仿真分析
4.1 仿真模型的建立
在Cruise中建立整車模型,在Simulink中建立燃料電池及能量管理策略的模型,然后通過Interface組件進行聯合仿真。Cruise和Simulink之間的數據通信示意圖如圖11所示。
4.2 基于工況識別的仿真分析
為了對比分析,考慮無工況識別、基于傳統算法SVM工況識別和基于GA-SVM工況識別3種情況,分別針對以上3種情況以隨機測試工況“市區-市區-市郊-高速-市郊-市區”進行仿真。采用工況識別時,將識別結果導入Simulink模型中,運用if else模塊針對識別出的不同工況自適應選擇其對應的能量管理策略。蓄電池初始值SOC設定為0.6,蓄電池SOC上限和下限分別為0.8和0.4。
分別針對以上3種情況,進行聯合仿真,車速跟隨情況如圖12所示,可以看出,3種情況下的實際跟隨車速與目標車速都幾乎沒有差別,動力性都可滿足要求。
無工況識別、傳統算法SVM工況識別及GA-SVM工況識別情況下的整車累積等效氫耗量和蓄電池SOC變化曲線如圖13、圖14所示。
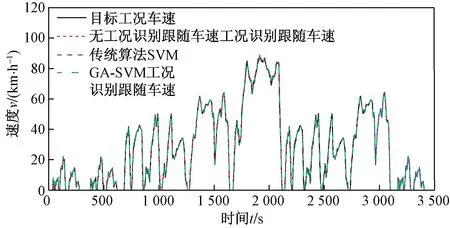
圖12 車速跟隨情況Fig.12 Speed following
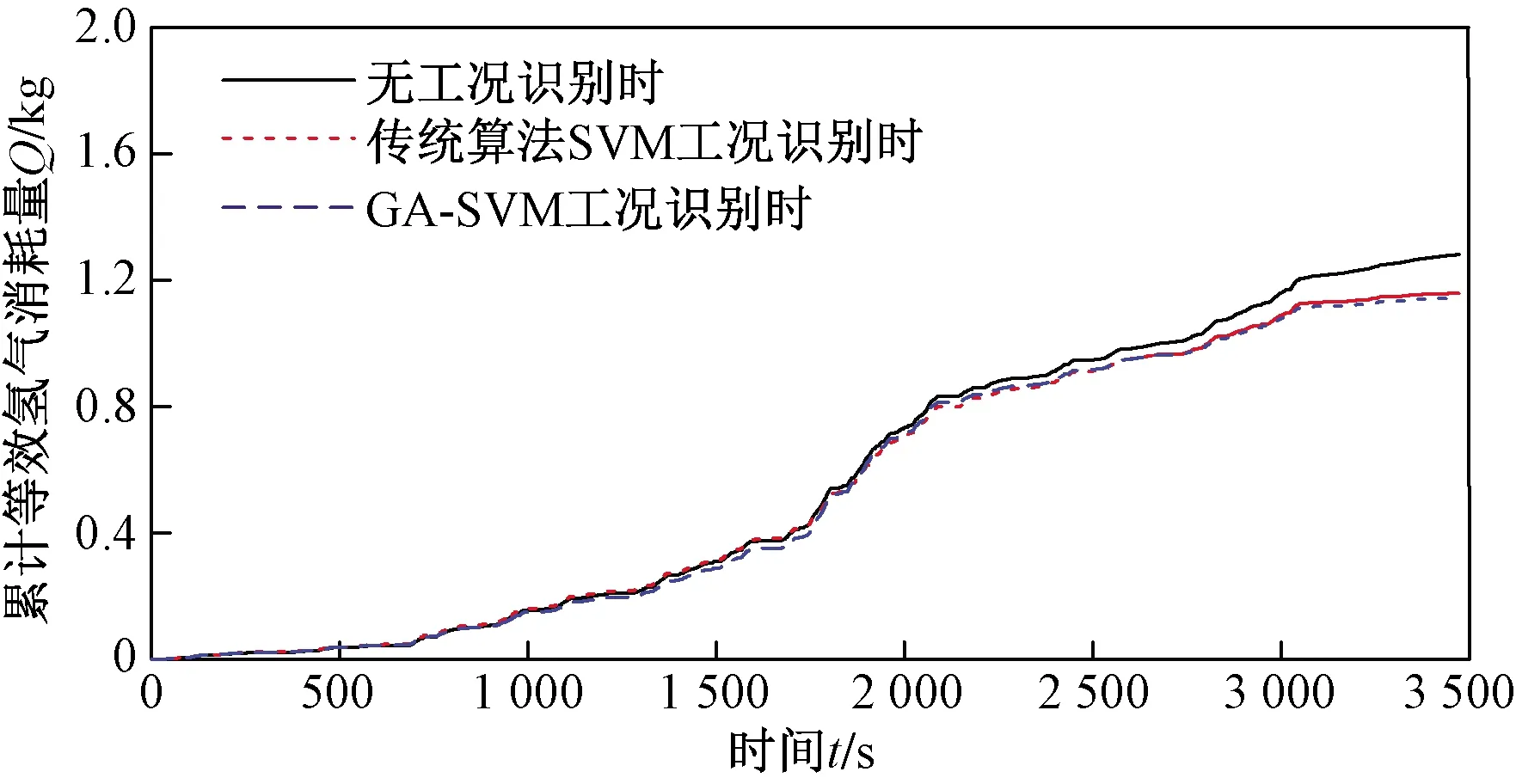
圖13 累積等效氫氣消耗量Fig.13 Cumulative equivalent hydrogen consumption
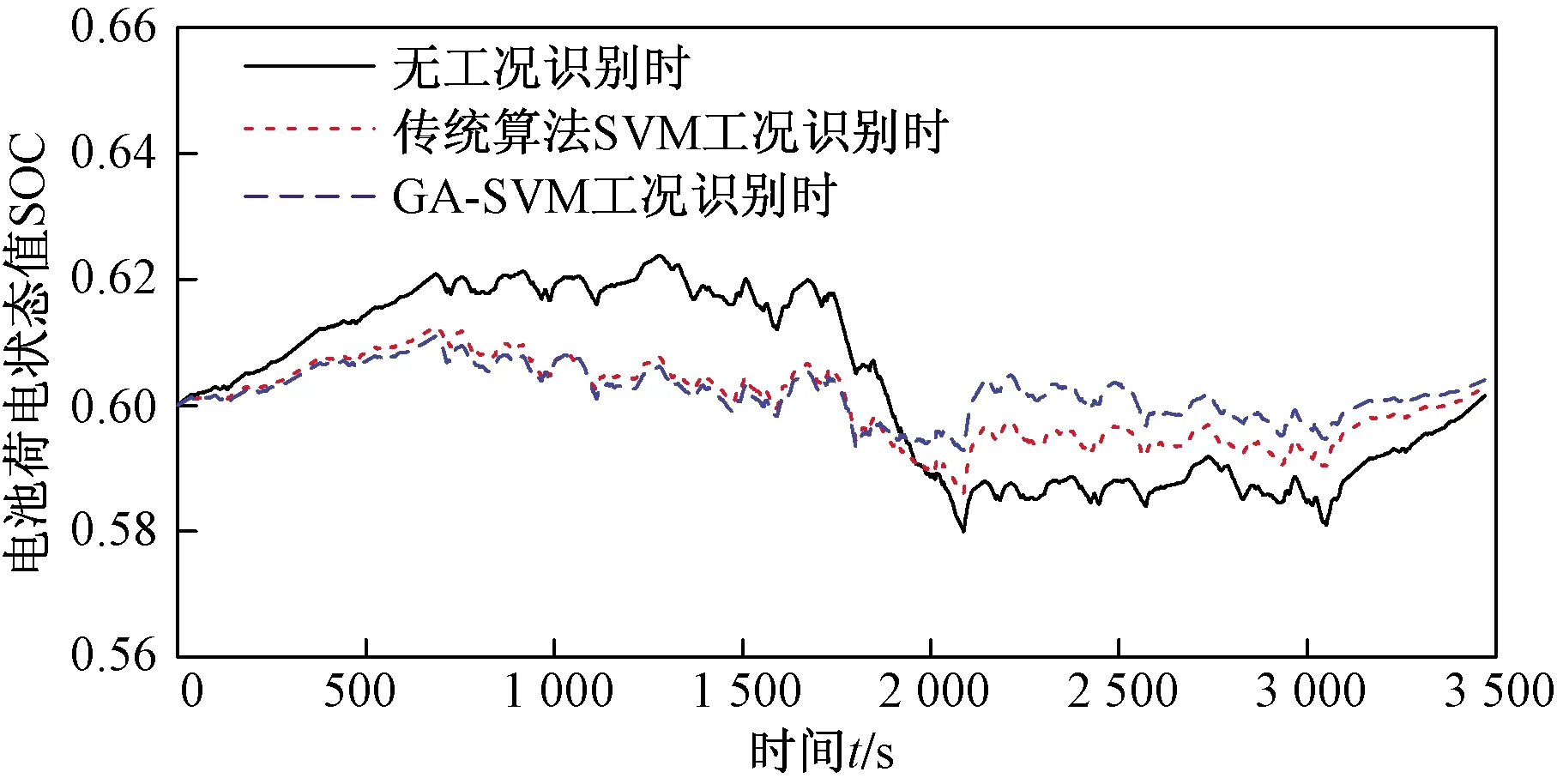
圖14 蓄電池SOC變化曲線Fig.14 SOC curve of storage battery
由圖13可知,測試工況的累積等效氫耗量在無工況識別時,傳統算法SVM工況識別時和GA-SVM工況識別時分別為1.239 2、1.158 0和1.142 8 kg,GA-SVM工況識別的情況下,相對于無工況識別時,累積等效氫耗量下降了7.78%;相對于傳統算法SVM工況識別時,累積等效氫耗量下降了1.31%。
由圖14可知,3種情況下蓄電池SOC都在合理范圍內,起始階段為市區工況,平均需求功率小于燃料電池輸出功率,故SOC有一定上升趨勢,工況識別的上升幅度較無工況識別小,說明在針對市區工況優化的模糊控制策略對控制SOC變化有較好的效果。采用工況識別時,整個工況SOC變化更加平緩,變化量明顯減小,且GA-SVM工況識別相對于傳統算法工況識別的SOC變化量又有進一步減少,有利于延長蓄電池壽命。
5 結論
(1)針對CHTC-HT工況,對其中市區、市郊和高速公路工況的特征參數進行提取分析,并采用傳統算法和遺傳算法優化的支持向量機進行工況識別,結果表明采用GA-SVM識別準確率較傳統算法SVM準確率提升6.153 8%。
(2)采用不同識別周期對測試工況進行識別,識別周期為90 s時,識別準確率最高,表明在實際工況識別中,識別周期過長或過短,都不利于識別準確率的提高。
(3)針對市區、市郊和高速工況的不同特點,設計相應的能量管理策略,并采用粒子群算法優化模糊控制器隸屬函數參數,得到3類典型工況的模糊控制器的參數。
(4)將GA-SVM工況識別技術應用到燃料電池混合動力汽車的能量管理策略中。由仿真結果可知,相對于無工況識別的模糊能量管理策略,基于GA-SVM工況識別策略使累積等效氫耗量降低7.78%,與傳統算法優化的SVM工況識別策略相比,累積等效氫耗量降低1.31%,表明本文提出的能量管理策略提升了汽車燃料經濟性,且蓄電池SOC變化量降低,變化更平緩,提高了蓄電池壽命。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
