汽輪機數字式電液調速系統關鍵技術研究
2020-06-29 07:17:29權少寧
微型電腦應用 2020年6期
關鍵詞:汽輪機
權少寧
摘 要:本文研究汽輪機數字式電液調速系統,針對數字電液控制系統中的非線性環節,完成了一種基于模糊內模控制策略的調速系統的設計。具體是將廣義被控對象通過粒子群算法的使用完成模型簡化處理,然后將其通過內模控制原理的運用完成內模PID的設計,使用最大靈敏度函數選取初始參數,并對參數采用模糊控制器完成在線整定過程。系統仿真結果表明本文設計的方法使參數選取的效率得以有效提升,在減少超調量的同時顯著提高了系統響應速度及抗干擾能力,從而使汽輪機調速系統的整體控制質量和效率得以有效提升,為汽輪機調速系統的優化和完善提供參考。
關鍵詞: 汽輪機; 數字電液控制系統; 調速系統; 模糊內模控制
中圖分類號: TM 311
文獻標志碼: A
Abstract: This paper mainly studies the digital electro-hydraulic speed control system of steam turbine. For the nonlinear link in the digital electro-hydraulic control system, a speed control system based on the fuzzy internal model control strategy is designed. The model simplification process is completed through the use of the particle swarm algorithm, and then the internal PID model is designed through the application of the internal model control principle, the initial parameters are selected by using the maximum sensitivity function, and the fuzzy controller is used to complete the online tuning. process. The system simulation results show that the method designed can effectively improve the efficiency of parameter selection, so that the system can significantly improve the system response speed and anti-interference ability and reduce the overshoot, so that the overall control quality and efficiency of the turbine governing system can be improved. These may provide reference for the optimization and improvement of steam turbine speed control system.
Key words: steam turbine; digital electro-hydraulic control system; speed control system; fuzzy internal model control
0 引言
快速發展的科學技術為工業質量和效率的提升提供了有力支撐,汽輪機以其獨特的優勢受到眾多工業領域的認可,得以在電力、石化、造紙、環保等工業領域廣泛應用。作為大型高轉速機械的一種汽輪機中的數字電液控制系統(DEH)起著重要作用,機組的安全性與可靠性受到DEH控制性能的直接影響,機組的穩定高效運轉則是提高工業企業的經濟效益的基本保障。而調速系統的主要功能在于確保汽輪機輸出功率和負荷間平衡狀態的保持(通過調整氣量)。尤其是在互聯大電網建成的背景下,日常生產生活對電網的穩定性及安全性的重視程度及要求越來越高,在發電機組中汽輪機調速系統發揮著重要的控制作用,其動態特性對供電質量產生直接影響。因此在構建汽輪機調速系統仿真模型的基礎上研究模型參數對電網穩定性的影響成為汽輪機系統仿真中的重要研究方向。
1 需求分析
在工業過程控制中傳統的 PID 控制方法應用較為普遍,具備設計過程繁瑣度較低、算法發展較為成熟、穩定性好等優勢,但由于汽輪機的系統較為復雜,傳統PID控制方法已經難以有效滿足特定的控制要求,目前對該方法進行優化和完善的研究較多,例如,在結合使用PID方法與模糊控制器的基礎上,對控制器的參數通過差分算法的使用完成優化過程,從而使系統的響應速度、魯棒性及穩定性得以有效提高;以汽輪機系統的復雜特性為依據,通過自學習和自適應能力較強的神經元和 PID方法的有效結合,有效提高了控制系統品質,完成了基于單神經元的自適應PID 控制策略的設計,并通過試驗對比模糊控制結果證明了此種方法的可行性。上述方法雖使系統的動態特性得以有效改善,但對于系統受到非線性環節影響情況的考慮不充分;而通過結合運用模糊控制器與串級控制方法實現了對系統中存在的干擾及參數變化情況的追蹤和分析,顯著提高了系統的魯棒性,但受限于復雜的設計過程及多個控制器參數的調節難度增加了應用成本;在對調速系統的參數時變因素(非線性)進行充分考慮的基礎上,通過有效結合運用RBP神經網絡和自適應逆控制理論完成了自適應逆控制器的設計,負荷擾動信號采用了發電機功率,實現了對干擾影響的有效抑制及目標跟蹤性能的顯著提高,單在設計時需分別考慮給定速度、外部干擾的影響情況,導致過程繁瑣復雜難以在工程中普及應用[1]。
2 電液伺服系統非線性分析
作為熱工況系統的一種汽輪機的相關參數具有時變、干擾、復雜的特點,非線性環節(包括飽和、死區等)在電液伺服系統中表現明顯,傳統的研究領域中大多忽視了調速系統的數學模型及對應參數的運用,準確模型的構建對電網等領域的長期穩定及性能的控制具有重要意義,對控制系統通過辨識汽輪機調速系統參數實現優化過程,在實現汽輪機組故障診斷會和狀態監測的同時使控制系統功能得以有效提升,本文主要在簡化系統模型的基礎上,完成完成內模PID的設計及有效初始參數的選取,進一步提升汽輪機數字式電液調速系統的控制性能。本文根據實際汽輪機的死區特性,通過模糊內模控制策略的設計和應用,使汽輪機數字電液控制系統(DEH)中非線性環節的影響得以有效降低,先將廣義被控對象通過粒子群算法(PSO,易于工程應用)的使用完成到一階慣性加時滯系統的逼近過程,并在此基礎上完成內模控制器的設計,實現以較少參數應用提高搜索速度。然后采用最大靈敏度函數,以函數同可調參數(由τc表示)間的關系為依據完成參數的初始選取。再對內模控制器的參數通過模糊控制特性的應用完成自適應在線調整過程。從而使具備非線性特點的控制系統的動靜態特性及抗干擾性能得以有效提高,實現汽輪機調速系統的進一步優化。本文以中小型汽輪機作為研究對象,將其簡化為系統數學模型,DEH系統中的非線性特性以主要由庫侖摩擦和滑閥正重疊量引起的死區為代表,系統穩定性及控制精度受到其穩定影響。
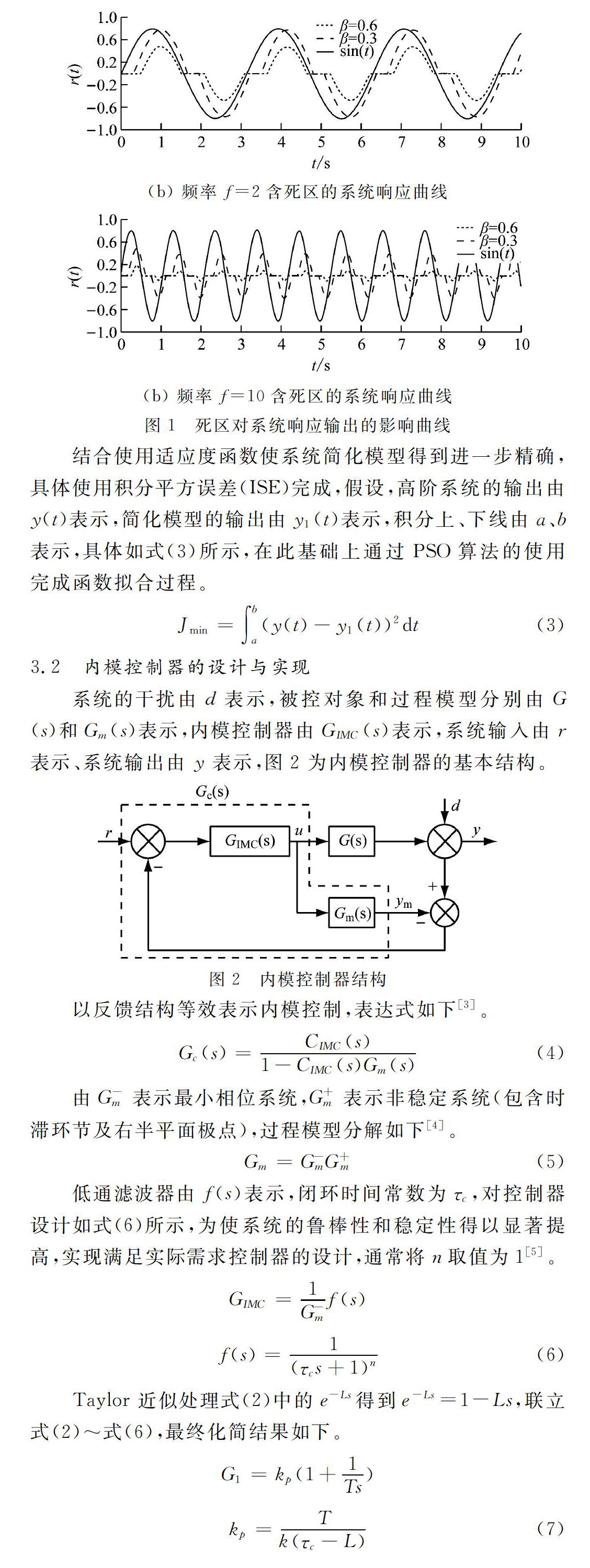
在分析死區對系統的影響時,具體在MATLAB環境下構建仿真模型如式(1)。圖1為存在死區的系統響應輸出情況,輸出結果表明系統的響應速度受到死區的影響產生了一定的延時,一定程度上降低了系統的穩態精度和動靜態特性,并且影響程度同死區寬度呈正比;死區在不同頻率下對系統產生的影響也不同,頻率與幅值成反比,同靜差呈正比,靜差越大則代表影響程度越明顯[2]。
3 內模控制的設計
3.1 系統簡化模型的構建
設計設計復雜高階系統的內模控制器的難度較大,不利于理想控制效果的實現,因此本文對復雜系統進行模型簡化處理,假設,延時時間
由L 表示等效模型的比例增益由k表示,積分時間常數由T 表示,具體采用的簡化模型如下[3]。
通過 MATLAB建模仿真后對基于PID 控制、內模控制、模糊內模控制的控制性能進行對比,系統響應曲線如圖4 所示。PID 控制雖速度快但超調量大,內模控制無超調量但調節效率低,模糊內模控制器相比之下表現出了更快的響應速度和更好的控制性能好,且超調量小,達到穩定值所需時間最短[11]。然后通過加入5% 的蒸汽擾動(在20 s處)以驗證抗擾動性能,結果如圖 5 所示,相比其他兩種控制方法,模糊內模控制器超調量最小,能以系統誤差及誤差變化率為依據完成輸出值的自適應調節,從使干擾得以有效抑制。
5 總結
傳統對決汽輪機 DEH 控制系統采取的控制策略大多由于復雜程度高、涉及到的待整定參數繁多而限制了整體控制功能的有效實現,為滿足復雜系統的控制要求,有效解決汽輪機 DEH 控制系統中非線性環節存在的問題,本文完成了模糊內模策略的構建和應用,顯著降低了參數整定工作,在時設計流程得以顯著簡化的同時降低了計算過程的復雜程度,通過 MATLAB建模及仿真試驗對比本文控制策略同其它方法的結果,證明了本文設計的模糊內模控制方案可快速達到設定值,能夠對干擾影響進行有效抑制,具有較佳的動靜態特性,具有較高的實際應用價值。
參考文獻
[1] 廖詩武,曾凱文,姚偉,文等.火電快速甩負荷機組動態仿真建模[J]. 電工技術學報, 2017(4):212-220.
[2] 張寶,樊印龍,顧正皓,等.汽輪機調速系統中影響電力系統低頻振蕩的關鍵因素[J]. 中國電力, 2017(1):105-110.
[3] 翟江,夏天,田芳,等. PSASP用戶自定義建模混合步長仿真機制的實現與應用[J]. 電網技術, 2016(11):3497-3502.
[4] 趙佳佳,馬喜平,賈嶸,等. 基于概率與小波分析的故障檢測方法及其應用[J]. 電網與清潔能源,2016(7):92-95.
[5] Zhang N, Li C, Li R, et al. A mixed-strategy based gravitational search algorithm for parameter identification of hydraulic turbine governing system[J]. Knowledge Based Systems, 2016(6):218-237
[6] 江效龍,魏樂,盛鍇,等. 基于果蠅優化算法的汽輪機調節系統參數辨識[J].動力工程學報, 2018(7):556-561.
[7] Paolo Casoli, Agostino Gambarotta, Nicola Pompini,Luca Riccò.Coupling excavator hydraulic system and internal combustion engine models for the real-time simulation[J]. Control Engineering Practice, 2015(9):26-37.
[8] 張寶,樊印龍,印旭洋.電力系統低頻振蕩對汽輪機組運行安全性的影響[J]. 中國電力,2017(11):120-123.
[9] 張寶,楊濤,項謹,等.電網瞬時故障時汽輪機汽門快控誤動作原因分析[J].中國電力, 2014(5):25-28+34.
[10] 劉巨,汪錦,姚偉,等. 負阻尼和強迫功率振蕩的特征分析與區分方法[J]. 電力系統保護與控制, 2016(19):76-84.
[11] 王鳳良.基于工程實踐的汽輪發電機組共用支撐轉子振動故障研究[J].電站系統工程,2016(6):9-12.
(收稿日期: 2019.05.29)
猜你喜歡
能源工程(2021年3期)2021-08-05 07:25:58
能源工程(2020年5期)2021-01-04 01:29:00
電子制作(2019年22期)2020-01-14 03:16:38
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
當代化工研究(2016年7期)2016-03-20 16:21:50
電測與儀表(2015年11期)2015-04-09 11:46:40
機電信息(2015年6期)2015-02-27 15:55:15
機械制造與自動化(2014年1期)2014-03-01 04:21:47
河南科技(2014年24期)2014-02-27 14:19:40