便攜式助力輪椅相關設計
2020-07-04 12:17:10李玉麟
科學與財富 2020年15期
李玉麟


摘 要:隨著我國人口老齡化進程逐漸加快以及肢體殘疾人數量逐漸增多,對輔助步行工具的需求也就日益提高,而輪椅作為代步工具可以有效的幫助他們提高行動自由度以及融入社會。
關鍵詞:助力輪椅;? ? 折疊
目前生活中普遍流行的輪椅,功能較為單一,一個輪椅不能滿足患者的絕大部分需求,因此并不能很好地滿足下肢殘障患者的使用需求。與此同時科技也在不斷發展,而老年人和殘障人士的自由活動能力和康復訓練由于器械原因依然被嚴重限制,因此他們對輔助代步工具的需求和要求日益提高,同時在國家號召創建和諧社會,關愛弱勢群體的大背景下,新的輪椅的出現已經成為了必然的趨勢,而具有代步與康復訓練功能為一體的便攜式輪椅,不僅能夠輔助患者完成康復訓練,還能夠滿足患者長距離行動的需求,可以更好的擴展和方便殘障人士的活動領域和空間,同時此輪椅便攜可折疊,所占空間小重量輕,對殘障人士克服病患及改變生活質量具有極其重大的意義。如今中國社會,老齡化越來越嚴重,殘疾率也高居不下,輪椅已成為老年人及行走不便者生活中的必須工具,借助輪椅他們能夠進行各種社會活動。目前無論鄉鎮還是城市無一不在飛速發展,其中階梯更是基本設施之一,如登越人行天橋和地下通道需要穿越樓梯等。然而目前最常用的是只可平地行走的普通輪椅和智能輪椅,普通輪椅爬樓不便,智能輪椅價格又過高,很難滿足廣大普通老百姓的需求。在這種情況下,本文設計了一種便攜式助力輪椅,而且因為其智能化程度相對低,因此價隨之下降,從而能夠滿足大多數使用者的承受能力,同時還保證了輪椅具有良好的功能。
國內兩種主流輪椅的弊端以及未來發展趨勢
1.主流的兩種輪椅弊端
電動輪椅,雖然減輕了殘障患者的體力活動強度,可以滿足長距離行走的需要;但搭載其他交通工具時,由于體積和重量過大,因此帶來很多行動不方便的地方。輪椅對搭載車輛時的上下移動,也不是用人力能夠完成的。目前的做法,是在車輛上配置機械手,像吊車一樣吊起和放下,這使得它同樣缺乏便捷靈活的特征。
使用傳統輪椅時,殘疾患者在進行康復訓練時,需要更換設備,康復患者很難自行完成,同時患者需要承擔很多額外的花銷,這時如果有一部,小巧輕便的,能能夠兼具代步與訓練功能的輪椅的輪椅,且方便殘疾患者自己可以移動,自行完成康復訓練,無疑會給下肢殘障人士的生活帶來質量的改變。
2.中國輪椅未來的發展趨勢
1便攜性:人們越來越多地接受了輪椅作為代步工具的基本理念。隨著現代制造業業的蓬勃發展和人們生活需求的提高,殘疾人出行的愿望也越來越強烈。因為需要大量駕車出行因此對輪椅的需求朝著更加便攜的方向快速發展。
2功能性:輪椅乘坐者的身體狀況千差萬別,不同狀況的乘坐者需要不同的輪椅,隨著康復護理理念的提升,將推動輪椅向攻能性發展,這將為廣大的乘坐者和護理人員提供更加安全、舒適、便捷的使用體驗。
3個性化:為了更好地滿足不同乘坐者的需求,個性化的定制輪椅將會不斷發展。由于我國專業人員的缺乏和個性輪椅制定成本的高昂,限制了我國一對一定制輪椅的發展,更加適合中國國情的是針對某一類人群一對多的定制輪椅方案。
4電動化:隨著社會的發展進步,人們生活水平的提高,行走困難的人士長距離出行的需求不斷增長。需要更對方便地進行長距離驅動的代步工具,勢必帶動電動輪椅的發展。
5智能化:隨著社會的發展和人類文明程度的提高,老年人和殘疾人,尤其是一些喪失上肢運動能力的殘疾人,愈來愈需要運用現代高新技術來改善他們的生活質量和自由度,這也將推動輪椅逐步智能化的發展。
縱觀輪椅在不同國家以及地區的發展變遷史,從功能、結構、尺寸、款型上體現出極為明顯的區域特點,怎樣根據乘坐習慣、中國人的體型、使用環境、路面狀況以及消費的能力,讓我們為老年人以及殘障人士提供更加合適的輪椅,這都是需要我們思考的。
為了能使各種與人體有關的設計能與人的生理特點相符合,讓人在使用輪椅的時候能夠處于舒適的狀態和合適的環境之中,我們在設計時有必要把人體的尺寸考慮進去,人體尺寸是我們設計者確定我們產品尺寸的重要依據之一。我們身為便攜式助力輪椅的設計者必須充分了解人體各部位的尺寸。只有通過這種方式,才能預先確定便攜式助力輪椅的使用者在輪椅的有關位置上的能見范圍和活動范圍。所以,也就要求我們設計者必須了解一些關于人體測量學的基本知識,并要求我們熟悉掌握有關設計所必要的人體測量的基本尺寸數據和使用的條件。
輪椅的結構以及設計
1.簡要介紹
一種用于輔助下肢殘章患者行動與康復治療的便攜式助力輪椅,具有助力功能、代步功能以及可以折疊的便攜功能。輪椅上端握把可旋轉,握把處有一對壓力傳感器,可以檢測使用者是否處于握緊狀態情況,并控制輪子轉動,輔助患者進行康復訓練并保證患者的安全;輪椅的右側扶手處安裝有搖桿控制裝置,患者可以輕松地通過搖桿控制輪椅的移動方向,實現代步的功能;產品整體可以通過折疊收縮改變輪椅的外形尺寸,達到輪椅攜帶便捷、節省空間的目的。
多功能折疊式助力代步輪椅,包括柱承重輪子5和導向輪子6,其特征在于:(1)該輪椅還包括靠背1、座位2 、支架12和支撐桿21,支架12和支撐桿21分為左右兩組,每組中的支架12和支撐桿21均通過支點102活動連接。
(2)靠背1和座位2均為能以中線折疊的折疊結構,靠背1的左右兩側設置在左右兩個支架12之間,座位2設置在左右兩個支撐桿21之間。
(3)座位2的底部設置有X形支架,X形支架包括兩個底部支撐桿9,兩個底部支撐桿9交叉,兩個底部支撐桿9能以該交叉點為軸轉動形成活動的X形結構。
(4)兩個底部支撐桿9的上端支撐座位2的左右兩側,兩個底部支撐桿9的底端通過可旋轉支撐座91改變角度。
(5)支撐桿21的側方還設置有用于支撐橫向手扶支撐桿7的定位卡座 8。
輪椅使用時,支架12與支架21依靠支點102旋轉調整至預先設定好的位置,定位桿9調整至預先設定好的角度,在支撐座91的支撐下,輪椅即進入穩定的使用狀態如圖1所示。
輪椅使用電力驅動并通過手動搖桿71控制方向驅動輪6控制輪椅的移動方向,實現代步的功能。
當患者需要進行康復訓練時,將握把3依靠可旋轉支架32旋轉180度;支撐桿12與支撐桿21依靠支點102調整至預先設定好的角度,依靠卡座8將扶手支撐桿7位置鎖定;將踏板4依靠可旋轉支點41向上旋轉90度;此時,輪椅進入輔助康復訓練的使用狀態如圖2所示。
其中,握把3部分安裝有電容感應開關33,可以通過檢測控制握把3處的觸摸情況,控制輪子6轉動,輔助患者完成康復訓練。當患者手部離開時,輪子6停止轉動,以保證患者的安全。剎車裝置31,可用于緊急情況時患者自主對輪椅進行制動,以保護患者的安全。
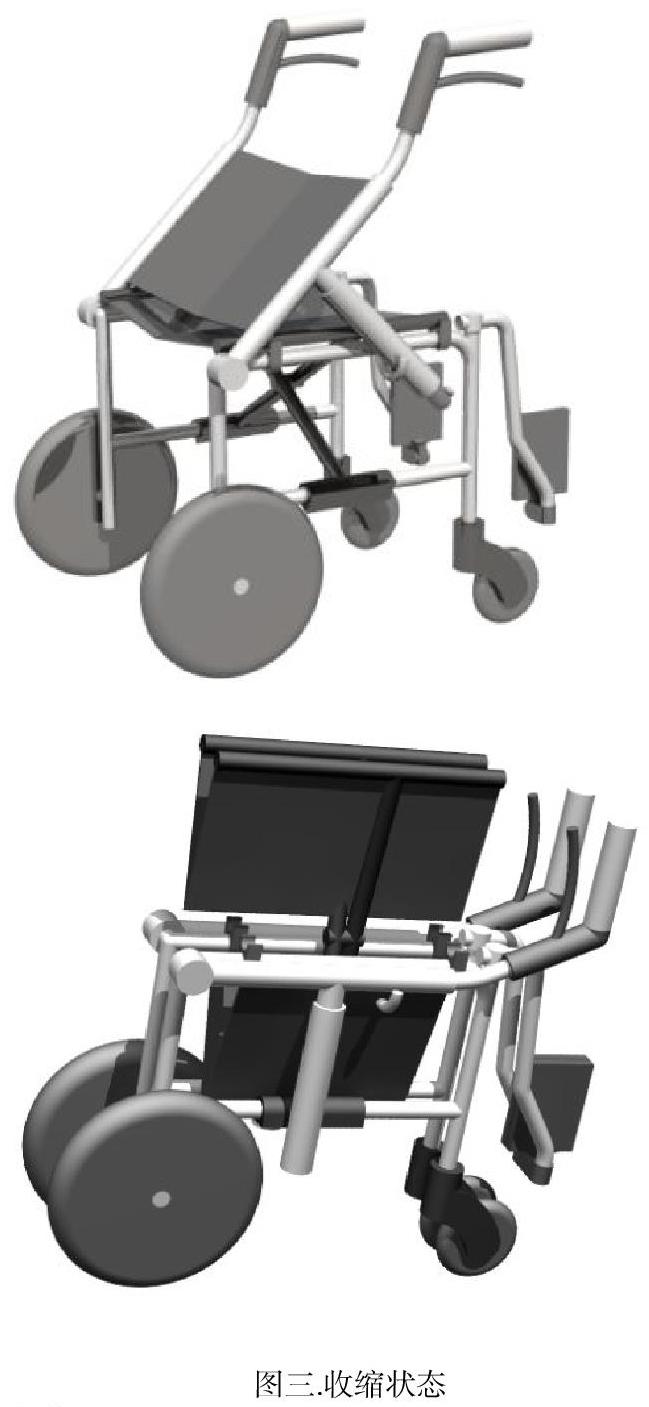
當使用者完成康復訓練需要放置時,解除卡座8與扶手支撐桿桿7之間的鎖死,將卡座8向內旋轉90度。靠背1向座位2并攏,依靠支點102完成并攏動作;當支撐桿7與地面完全垂直后,將輪椅沿靠背折疊處11與座位折疊處22向中間折疊,底部支撐桿9支撐起椅背折疊處11與座位折疊處22,依靠可旋轉支撐座91完成折疊動作。支架72內部具有凹槽,遙桿71可收縮至凹槽內,支架72可收縮至扶手支架7內部,當輪椅處于折疊狀態時可以起到保護遙桿的作用。如圖3。
2.產品制作及原理
(1)助力系統組成及運動原理
助力輪椅車驅動系統通過力覺傳感器系統探測使用者通過手推輪給系統的初始力大小、速度大小綜合控制直流驅動電機的輸出功率,經過一定的運算處理后,由控制器產生 PWM 波形控制直流驅動電機,合理調整直流驅動電機的輸出功率,實現對輪椅的綜合驅動[2]。輪椅的助力驅動系統相關原理的示意圖如下圖圖 4 所示:
左輪和右輪由獨立驅動系統分別進行進行驅動,當 F1與F2相同時,輪椅處于直行狀態;當 F1大于F2時,輪椅進行右轉;當 F1小于F2時,輪椅進行左轉;F1和 F2始終都擁有一個向前的合力 F。
為了更好的實現輪椅的助力功能,整個系統由以下的幾個模塊構成:信號處理與中心控制模塊、力覺傳感模塊、動力驅動模塊、輪速采集模塊。系統的原理框圖如下圖 3 所示。
[4]力覺傳感系統的主要方式[1-5]:(1)為便于采集使用者作用于手推輪的力矩。因為有 F=ma,加速度正比于手所施加的力,因此我們可以通過采集加速度來替代力的采集。最后我們選取了角加速度傳感器作為實時采集使用者推動輪椅產生的加速度的儀器,角加速度傳感器和輪椅助力驅動系統中的直流驅動電機連接在一起,并以此來實現同步運轉。同時將實時采集的加速度的變化作為系統的輸入信號(2)采用扭矩傳感器來直接采集使用者作用于手推輪上的力,通過傳送器將信號傳送至信號處理中心進行進一步的處理,從而實現了力覺采集(3)我們將采用角度傳感器把手推輪相對車輪的偏轉角度作為使用者的施力信號來進行數據的采集,并且通過傳送器傳送到信號處理中心進行運算處理,以此來實現力覺數據采集采集(4)我們可以通過壓力傳感器來采集手推輪相對于車輪偏轉的時候作用于輪轂內的力來作為使用者的施力信號來進行數據采集。并且將數據通過傳送器傳送到信號處理中心來進行處理,以此來實現力覺采集。當輪速采集系統將速度采集并且傳送到計算機之后,這些速度數據會被傳輸到基于 Lab VIEW 的便攜式助力輪椅的智能檢測及控制系統進行顯示,分析以及處理,同時輪椅還會實時監控輪椅車的運行速度并以此來確保安全,當輪速超過 10km/h 時,輪椅會自行啟動保護程序,并對輪椅進行降速處理來確保乘坐人的安全。
(2)電動部分原理綱要
控制電路主要由液晶顯示、蓄電池、操縱桿、主控制器、直流電機及驅動模塊、轉向燈、電池電壓檢測電路等共同組成。操作操縱桿任意方向運動都將會生成兩路幅值大小不同、極性不同的模擬電壓信號。這兩路模擬電壓信號將會通過信號調節電路后直接接入兩路高精度模數轉換并且同時進行轉換。主控制器將會實時采集這兩路的模擬電壓信號并且按照已設定好的路徑規劃程序來進行數據運算和處理,并且再將它轉化為電機驅動信號。并分別給左右兩電機驅動電路不同的驅動電壓信號和不同的方向信號,從而使得兩電機的轉向和轉速相同或者不同。以此達到驅使輪椅進行轉向、后退、前進等各種運動模式的要求。為了保障使用輪椅的安全,我們特別設計了轉向燈以及喇機電路,還有電壓檢測電路等。主控制器對行車速度和蓄電池電壓進行實時檢測,并通過顯示當前車速和剩余電量來把信息傳遞給使用者使其更好的利用輪椅。
結束語
隨著近年來人們的收入增加,消費水品逐漸提高,使得我們對更高的生活質量有了一定的要求。而本文設計的便攜式助力輪椅對老年人以及殘障人群的生活質量的提高有著非常大的幫助。本文的設計主要是博采眾長,將多種輪椅的特點以及優勢融于一體,這使得我們在盡量減少成本以及維護費用的情況下,還可以讓老人以及殘障人士的需求有多方面的滿足。它將是這類人群的最好伴侶,同時通過多種傳感器的控制以及計算可以使輪椅保證老人以及殘障人群的出行,對整個社會的持續性健康發展來說,有很重要的意義。
參考文獻:
[1]白大鵬,多功能助行機器人機構研究[D].哈爾濱:哈爾濱工程大學,2013.
[2]伊蕾,助行康復機器人控制策略研究[D].哈爾濱:哈爾濱工程大學.2012.
[3]夏振濤,助行訓練機器人系統設計及步態控制實驗研究[D].哈爾濱:哈爾濱工程大學.2009
[4]李倩.6萬名殘疾人老年人康復訓練試點項目啟動[N].內蒙古日報,2012-09-06.
[5]趙建玲. 中國老年殘疾人現狀與長期照護制度探索[J]. 中國老年學, 2014(10):2907-2910.
[6]陳昫. 我國老年殘疾人的家庭長期照護體系研究——以北京市老年殘疾人為例[J]. 理論月刊,
[7]曾翔. 面向助老助殘的智能輪椅開發[D]. 上海交通大學, 2007.
[8]項仁明. 針對殘障人士出行方式的設計研究[D]. 北京理工大學, 2015.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
科學大眾(2021年9期)2021-07-16 07:02:40
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
