管道下穿高鐵橋墩施工變形監測方案研究
2020-07-05 08:46:26桑文剛李玉斌黃黎明趙培華張帥
山東建筑大學學報 2020年3期
桑文剛,李玉斌,黃黎明,趙培華,張帥
(山東建筑大學 測繪地理信息學院,山東 濟南250101)
0 引言
統計表明,截至2018年底中國高速鐵路總里程已達29 000 km,居世界首位[1]。高速鐵路在給人們生活帶來快捷便利的同時,也對其整個運營期間的安全監測提出了更高要求。但伴隨著城市化進程的不斷加快,水、電、氣及通訊管道下穿既有高速鐵路的情況時有發生,在項目施工過程中會對鐵路橋梁樁基及橋墩的穩定性產生一定的影響。為了確保鐵路的安全性及穩定性,保證高鐵的安全運營,保障人民群眾的生命財產安全,必須在施工期對施工影響范圍內的高鐵橋墩開展高精度變形監測,而采用免受施工干擾且快速、高精度、高可靠性的變形監測方案,是保障施工期間高速鐵路安全穩定的有效途徑。
目前,全球導航衛星系統 GNSS(Global Navigation Satellite System)技術能夠實現高精度、長周期自動連續監測,在高鐵前期勘探及施工期是進行CP0、CPI、CPII控制網布測的主要手段[2-3],但是受環境因素及衛星信號遮擋影響,難以滿足下穿高鐵橋墩施工期監測的要求。攝影測量及三維激光掃描技術可以通過非接觸手段快速獲取監測對象更為豐富的面測量數據,但其測量精度隨著觀測距離的增加而大打折扣[4],精度、可靠性有待進一步提高。精密水準儀獲取的沉降監測數據精度高,卻無法同時測量水平位移的變化,難以在時間維度與水平位移監測實現同步觀測。測量機器人是集自動識別、精確照準、自動獲取角度與距離等功能于一體的高精度電子全站儀[5],在一定觀測條件下,能高效獲取目標點的三維坐標信息,且憑借其高精度、自動搜索與精確照準等優點,非常適合邊坡、大壩、基坑、橋墩、隧道等工程的三維變形監測[6-10]。但下穿高鐵橋墩管道施工具有周期短、大型開挖設備施工影響大以及高鐵周邊以農田為主,地質條件差,基準站選址困難等特殊性,因此文章結合供水管道穿越京滬高鐵徐州某段施工專項變形監測項目,在滿足標準和技術設計方案要求的基礎上有針對性地進行監測方案設計,并對監測結果進行精度分析和數據預測。
1 管道下穿高鐵橋墩施工變形監測方案設計
京滬高速鐵路徐州某段因供水管道擴建,需要下穿施工,項目涉及26#、27#兩個橋墩,跨度中心采用放坡明挖方式穿越鐵路,并與京滬高鐵線路成90°夾角,其基坑開挖深度為2.5 m。為了保證施工過程中以及竣工之后京滬高鐵的安全運營,必須對該段高速鐵路開展安全變形監測。依據GB 50026—2007《工程測量規范》[11]和JGJ 8—2016《建筑變形測量規范》[12]中相關規定,同時為了及時反饋監測信息確保高速鐵路的穩定與高鐵的安全運行,根據鐵路管理部門要求及相關管理辦法制定本工程的監測控制值,并分別將控制值的60%、75%、90%作為黃色、橙色、紅色三級預警。水平及垂直位移監測的黃色、橙色和紅色預警值分別為0.60、0.75和0.90 mm,其限值為1.00 mm。
考慮到不同階段對高速鐵路穩定性產生的影響不同,根據施工進度在不同階段采用不同的監測頻率。施工之前,測量4次確定初始值;施工過程中,每天測量4次;施工結束后,每天測量2次。
由于項目不僅精度要求較高,而且施工工期短,僅為10 d,此外高鐵沿線左右兩側50m范圍內為綠化帶及果樹林,地質條件及通視條件較差,施工過程中還面臨著開挖設備、建材的干擾,因此需要有針對性地進行監測方案設計。
1.1 監測方式
為了滿足高鐵橋墩高精度變形監測的要求,在儀器設備方面選用測角和測距精度分別為±0.5″和±0.6 mm+1 ppm的徠卡TS 50高精密測量型機器人,該儀器具備自動搜索目標與量測功能,可有效減少人工照準等誤差的影響,同步實現水平及垂直方向位移監測。為避免對中誤差等的影響,依據規范需建立觀測墩,并配備強制對中設備,但考慮到施工期短,觀測墩無法長時間靜置穩定,以及監測期間高鐵高速通過及大型設備開挖震動的持續影響,采用基于后方交會原理的自由設站法,通過觀測基準點,實現自由設站方式下的觀測站定位,有效地減弱了每期觀測時安置儀器潛在的對中誤差;每次觀測采用正倒鏡觀測法觀測兩個測回,邊角同測,基于極坐標法同步確定監測點三維坐標[13]。為減弱溫度、氣壓等環境因素對儀器測量定位精度的影響,應考慮季節及天氣等因素,根據觀測頻率選擇觀測時段,并配備溫度計與氣壓計進行溫度、氣壓及濕度的觀測與改正[14]。此外,為了方便分析各期監測數據,需根據鐵路走向建立獨立坐標系。
1.2 監測網的建立
監測點分布如圖1所示,供水管道將下穿26#、27#橋墩施工,因此在重點監測對象26#、27#橋墩墩身兩側及中間部位分別設置4個監測點(D 26-1、D 26-2、D 26-3、D 26-4和D 27-1、D 27-2、D 27-3、D 27-4),次重點監測對象25#、28#墩身兩側分別設置2個監測點(D 25-1、D 25-2和D 28-1、D 28-2),共計12個位移監測點,采用成本較低且隱蔽性較好的L型監測小棱鏡固定在監測點上。為了提高監測數據的準確性和監測的連續性,在監測范圍的東西兩側分別設置固定觀測墩,并配置強制對中設備,在保證測站穩定的同時,可以有效消除測量機器人馬達轉動以及儀器對中引入的誤差。考慮到現場除京滬高鐵及農田之外再無其他建筑,因此基準點(JZDW 1、JZDW 2、JZDW 3、JZDE 1、JZDE 2、JZDE 3)只能布置在遠離施工影響區且通視條件良好的24#、29#和30#高鐵橋墩上。同時,為了直觀反映位移變化量分別在高速鐵路順橋向與橫橋向的大小,以平行于鐵路軸線方向(南北方向)為x軸,以垂直于鐵路軸線方向(東西方向)為y軸,按照左手原則建立獨立空間直角坐標系,如圖2所示。圖中α為水平角、β為豎直角、p為監測點。
在實施監測前,觀測墩及監測小棱鏡經過靜置穩定后,采用后方交會法及極坐標法分別確定測站點及監測點的三維坐標。經多期觀測并進行穩定性分析,取監測點坐標與初始坐標作差計算位移量[15]。
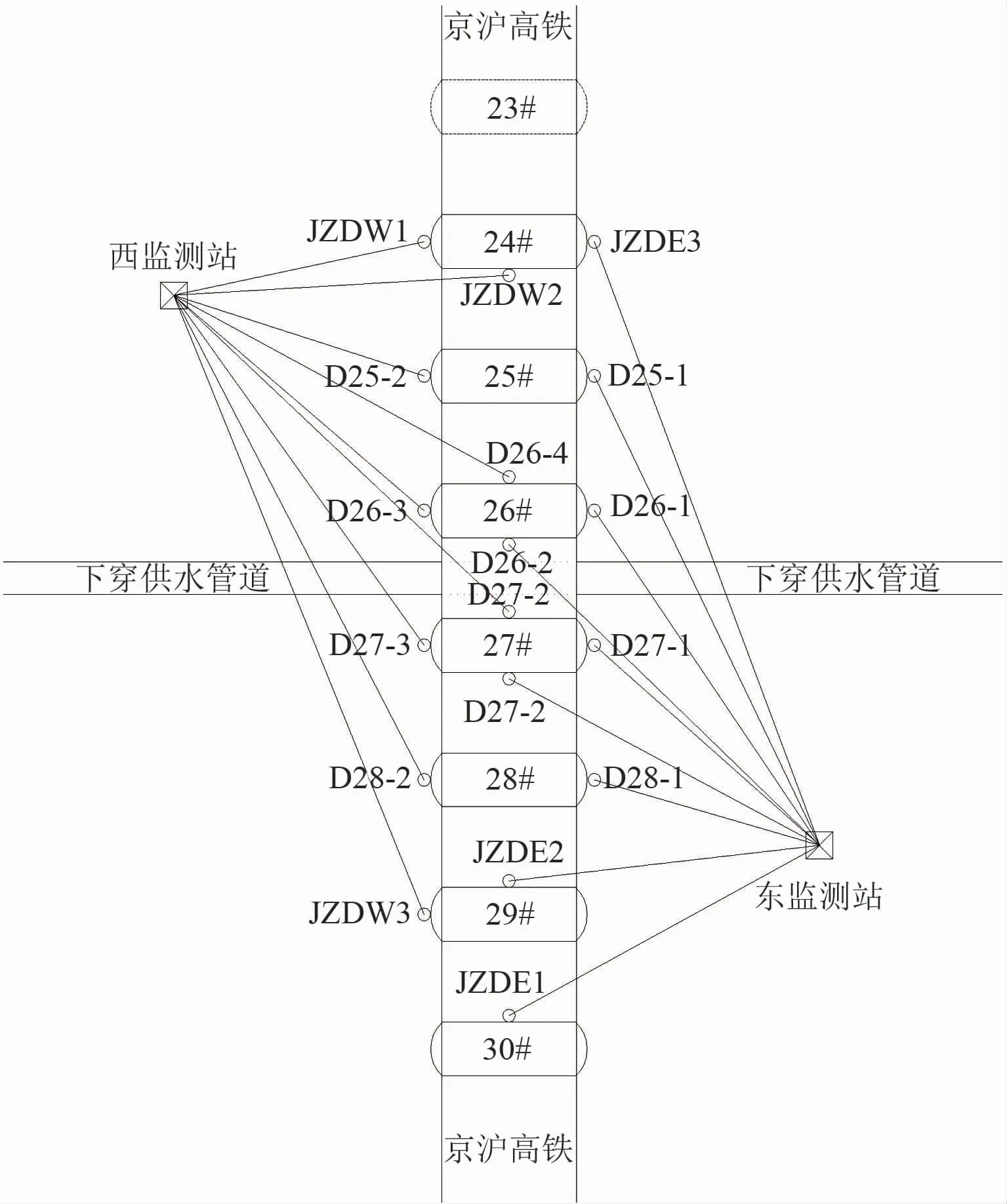
圖1 監測點分布示意圖
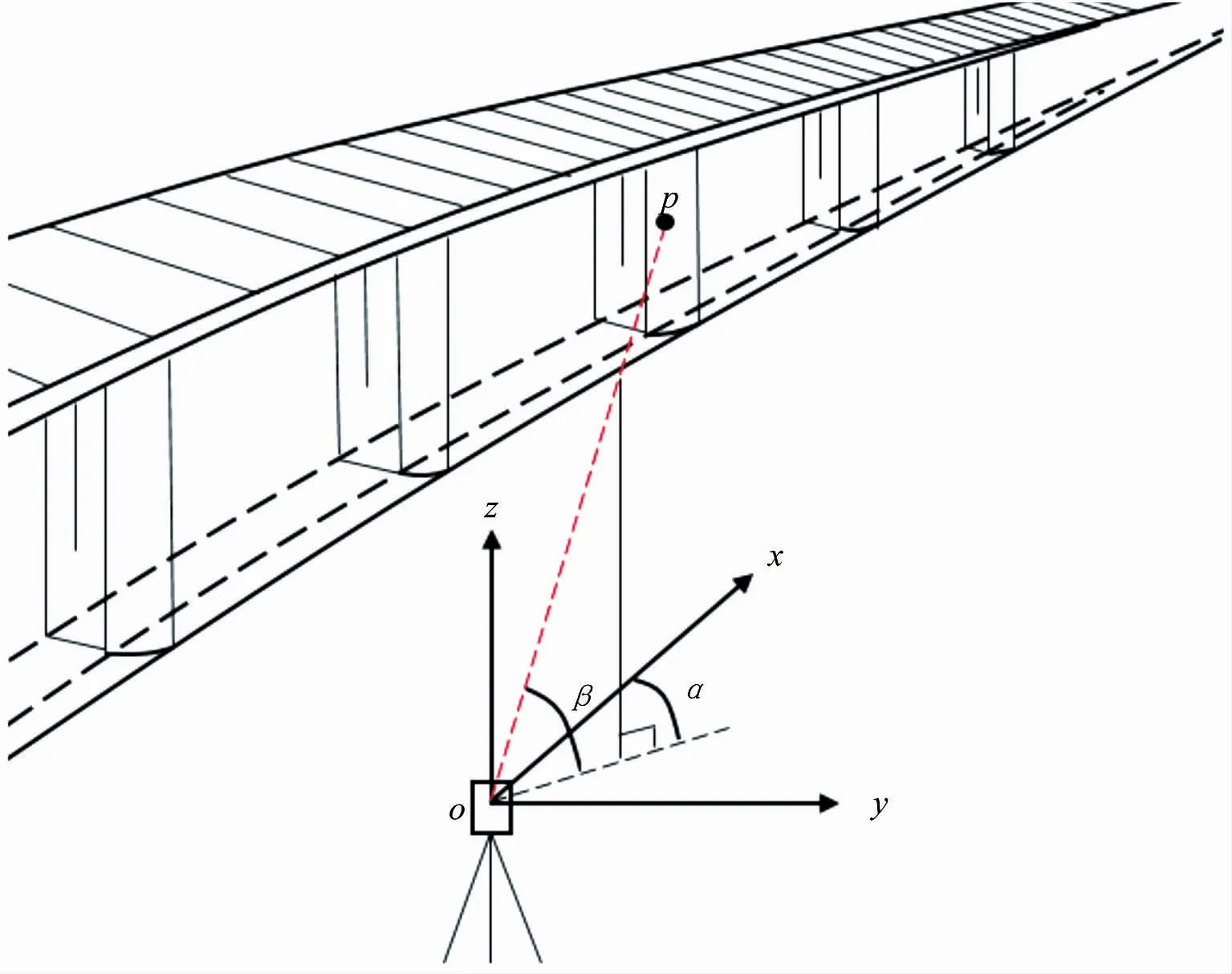
圖2 獨立空間直角坐標系示意圖
2 管道下穿高鐵橋墩施工變形監測原理及預測方法
2.1 位移監測原理
設經后方交會后確定測站點的三維坐標為(xCZ,yCZ,zCZ),在建立的獨立坐標系下測量機器人,利用極坐標法測定各監測點的三維坐標(xi,yi,zi)可由式(1)[16]表示為
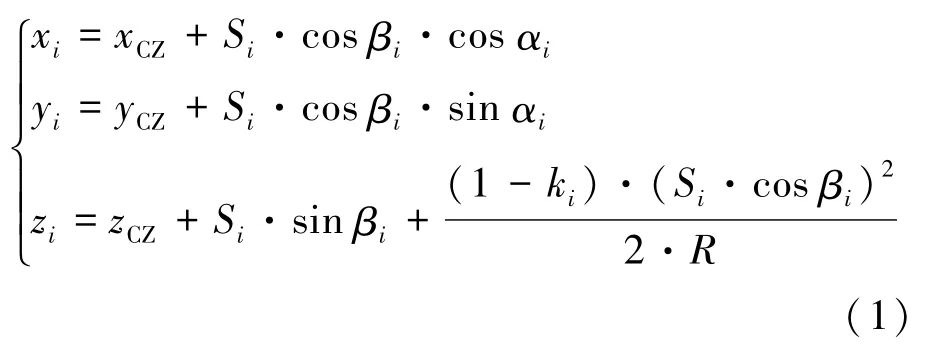
式中:Si為斜距,m;βi為豎直角,°;αi為水平角,°;ki為大氣折光系數;R為地球半徑,m。
為了削弱地球曲率和大氣折光對高差觀測值的影響,每天的觀測都應避開日出、日落及太陽中天時段,選擇固定時段進行觀測,同時進行溫度、氣壓及濕度改正[17]。
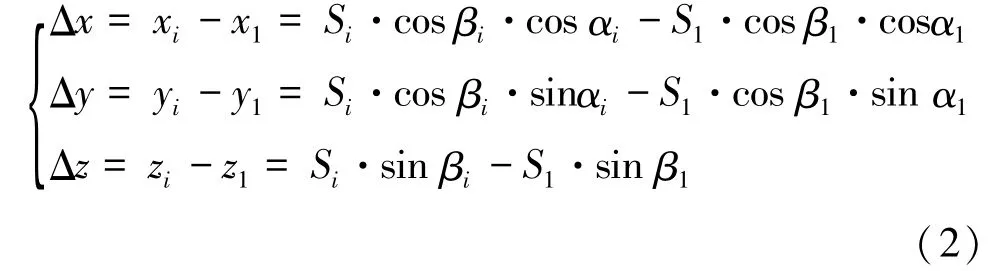
將測量機器人測得的監測點第i周期的三維坐標與初始坐標相減,可得監測點的位移觀測量,由式(2)表示為
2.2 基于卡爾曼濾波形變預測方法
變形監測不僅要采用高精度的儀器設備及科學方法,實現變形量的精確獲取,而且還需要對變形趨勢進行預測預報。考慮到變形監測的動態及準動態特性,可以利用卡爾曼濾波進行預測。卡爾曼濾波是在噪聲存在的情況下通過對系統狀態的不斷預測與不斷修正,在測量值和預測值之間尋求最佳估值的遞歸算法,是當前應用最廣泛的一種動態數據處理方法,具有最小無偏差性,在變形監測數據處理方面得到了廣泛應用。考慮到高鐵橋墩整體較為穩定,變形量相對較小,因此將監測點的位移視為狀態向量,將監測點變形速度視為隨機干擾,建立卡爾曼濾波模型。高速鐵路橋墩的基礎十分牢固,橋墩上監測點的位移過程可以視為一個隨機過程。離散線性卡爾曼濾波的數學模型由狀態方程和觀測方程組成,分別由式(3)和(4)表示為

式中:Xk為系統狀態向量;Zk為系統觀測向量;A為系統狀態轉移矩陣;Γ為動態噪聲矩陣;H為觀測方程系數矩陣;Wk和Vk分別為動態噪聲和測量噪聲,視為互不相關,服從均值為零,方差分別為Q和R的高斯白噪聲序列。
根據最小二乘原理,可得離散線性卡爾曼濾波的工作原理及其遞推公式[18]。
狀態估計值一步預測由式(5)表示為

誤差協方差矩陣一步預測由式(6)表示為

卡爾曼增益的計算由式(7)表示為
狀態估計值的更新由式(8)表示為

誤差協方差矩陣的更新由式(9)表示為

通常將式(5)和(6)稱為狀態更新方程,卡爾曼濾波利用前一時刻的狀態估計值和誤差協方差矩陣推算當前時刻的狀態估計值和誤差協方差矩陣,為下一步運算提供先驗估計;將式(7)~(9)稱為測量更新方程,卡爾曼濾波結合新的觀測值修正先驗估計來獲得最優估計。在給定狀態估計及其對應誤差協方差矩陣的初始值之后,可以根據卡爾曼濾波遞推算法,結合觀測值實現數據的濾波與預測。可以看出,卡爾曼濾波的計算過程只使用最新的信息,因此只需很小的數據存儲量。
3 管道下穿高鐵橋墩施工變形監測精度及預測分析
考慮到監測項目的精度要求比較高且關系到高鐵的安全運營,因此必須對監測方案進行精度驗證。高精度變形監測的數據中不可避免地會存在溫度變化、風力等隨機擾動誤差的影響。為了盡可能地反映高速鐵路變形監測系統的真實變形規律,可以利用卡爾曼濾波對變形監測數據進行處理,剔除隨機誤差;同時前期的監測數據必然與后期的監測數據存在一定的內在聯系,可以通過前期大量監測數據建立合理的卡爾曼濾波模型,揭示變形體內在的運動規律,進而實現監測數據的科學預測。
3.1 監測方案精度驗證
對于式(1)和(2),由于觀測墩與監測棱鏡相對穩定,故Si≈S1=S、βi≈β1=β、αi≈α1=α、mSi≈m1=mS、mβi≈mβ1=mβ、mαi≈mα1=mα。其中,mS為測距精度,mβ為豎直角觀測精度,mα為水平角觀測精度。根據誤差傳播定律可得x、y、z及水平方向位移觀測值精度,由式(10)~(13)表示為
式中:ρ為常數,表示弧度對應的秒值。在監測網布置完成后正式施工之前,每天在固定觀測墩安置儀器,利用測量機器人的多測回測角功能自動采集基準點及監測點的水平角、豎直角和斜距等數據信息,對監測技術方案的實測精度進行驗證。根據式(10)~(13),利用Matlab編程計算監測點水平及垂直方向位移觀測值精度。結果表明,水平、垂直方向位移觀測值精度最大值分別為0.83和0.85mm,均小于監測方案中給出的1.0 mm精度要求,監測方案切實可行。
3.2 監測數據精度分析
選取測量機器人在施工期間(2018年10月24日—11月3日)采集的監測數據,計算監測點的三維坐標分量中誤差,并對其進行分析,見表1。根據監測要求,在施工期間每天進行4次觀測,取其平均值作為最終監測結果。由誤差傳播定律可知,理論上此時的觀測精度提高兩倍。
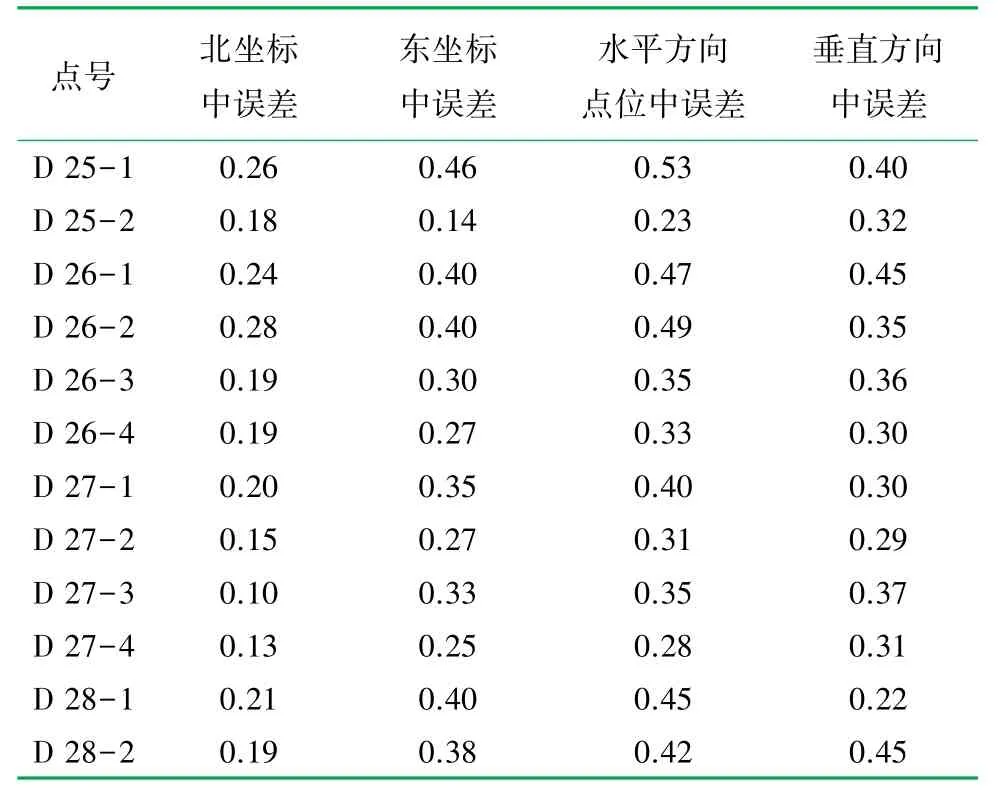
表1 施工期間監測點三維坐標分量中誤差表/mm
從表1中數據可知,施工期間監測點的水平、垂直方向點位中誤差最大值分別為0.53和0.45 mm,小于GB 50026—2007[11]中二等變形監測水平方向點位中誤差3.0 mm和垂直方向高程中誤差0.5 mm的限值,完全滿足二等變形監測的精度要求。
3.3 監測數據匯總與分析
依據設計的監測方案,2018年9月22日—12月5日在施工前、施工過程中及施工結束后,對施工影響范圍內的高鐵橋墩連續進行了75期變形監測,監測期間的水平及垂直位移累積變化量見表2。
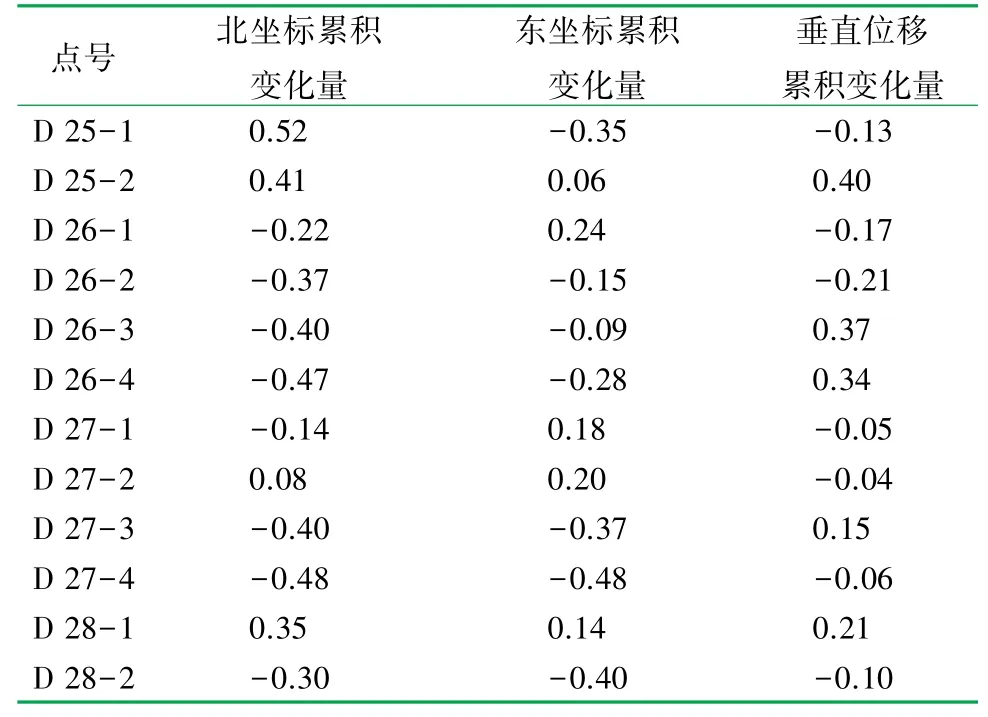
表2 水平位移和垂直位移累積量匯總表/mm
從表2中監測數據分析可知,供水管道穿越京滬線橋墩監測點的北坐標最大累積水平位移點是25號墩的1號點(D 25-1),其北坐標水平位移量為0.52 mm;東坐標最大累積位移點是27號墩的4號點(D 27-4),其東坐標水平位移量為-0.48 mm;最大累積垂直位移點是25號墩的2號點(D 25-2),其垂直位移量為0.40mm,3個方向的累積位移量均很小,說明供水管道下穿京滬線施工對京滬高速鐵路的影響很小。此外,選取最具有代表性的施工期間監測數據進行分析,繪制了各監測點的水平及垂直方向位移監測曲線圖,如圖3所示。
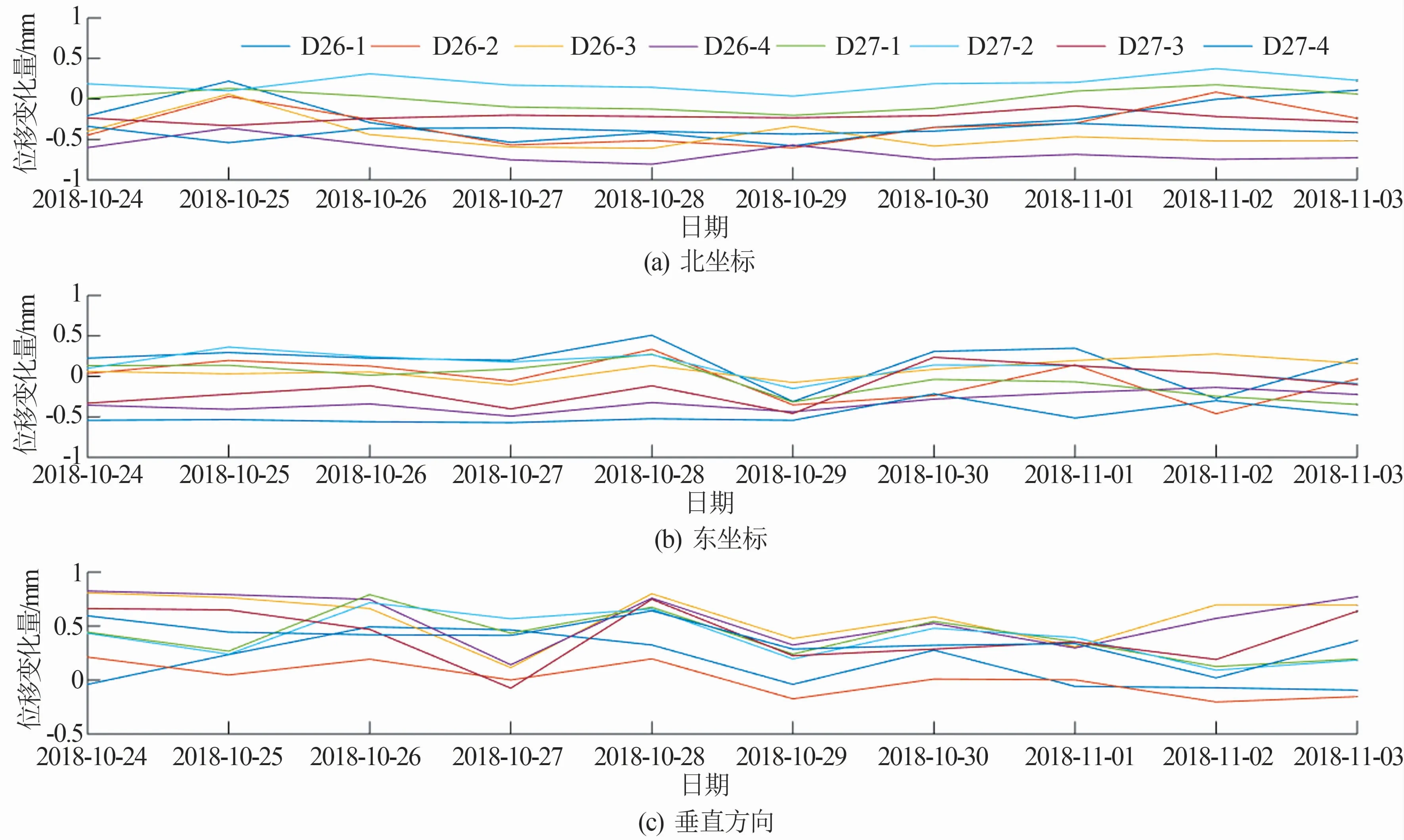
圖3 3個方向時間—位移曲線圖
根據圖3分析可知,監測期間橋墩水平及垂直方向位移變化整體上比較平穩,僅在供水管道下穿施工的10 d內,受施工影響,呈現小幅波動,但由于高鐵橋墩基礎設計及施工要求較高,且經過多年運營,較為穩定可靠,該波動幅值為0.02~0.64 mm,低于監測方案中給定的1.0mm限值,保證了工程順利進行。
3.4 卡爾曼濾波模型建立及數據預測
考慮到濾波初始值的選取可能直接影響濾波的穩定性及收斂速度,因此按照以下原則確定濾波初始值:系統過程狀態不隨時間變化,因此系統狀態轉移矩陣A確定為1;包含噪聲的觀測值可以視為狀態變量的直接體現,因此觀測矩陣H為1;根據監測方案中給出的精度要求以及徠卡TS50測量機器人的測量精度將測量誤差視為均值為零,方差為0.6的高斯白噪聲序列;根據經驗統計及試算,將過程噪聲確定為均值為零,方差為1的高斯白噪聲序列;濾波模型的初始狀態估計值X︿k0=0.138及其對應的初始方差陣P0=0.019,其值由前五期原始監測數據的均值和方差確定[19]。
現以高速鐵路橋墩其中一個監測點(D25-1)在整個監測過程中75期垂直方向位移的監測數據為例,建立了卡爾曼濾波模型,并對整個監測系統進行分析。以前5期原始監測數據確定濾波初始值建立模型,對整個監測周期的數據進行濾波,對后5期數據進行預測,并將原始觀測值與預測值作對比。其觀測值、卡爾曼濾波值、卡爾曼預測值和卡爾曼預測值與觀測值的差值以及卡爾曼增益的曲線如圖4所示,基于卡爾曼濾波模型的數據預測結果見表3。
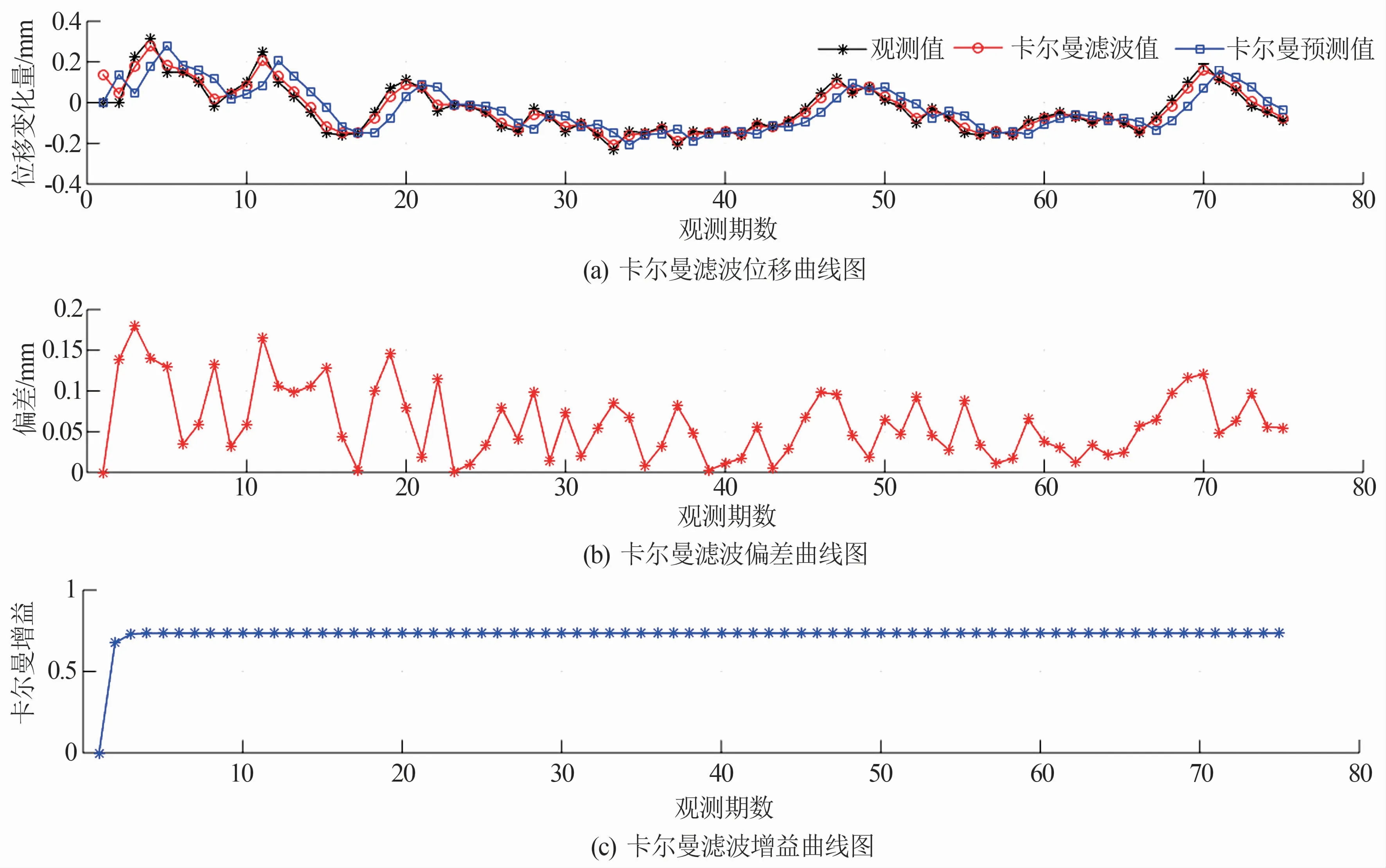
圖4 D25-1監測點垂直方向位移監測數據卡爾曼濾波結果圖
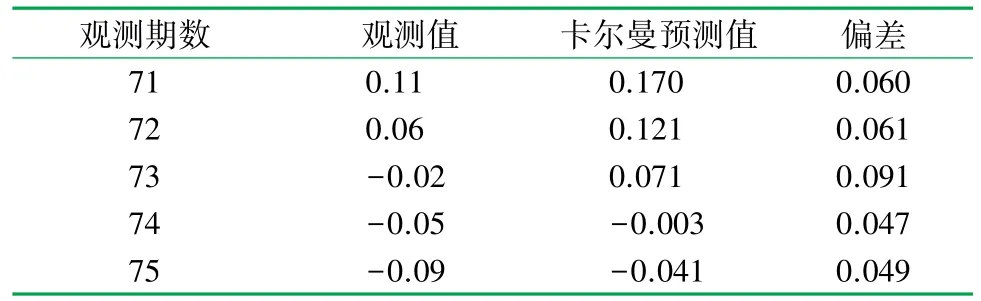
表3 基于卡爾曼濾波模型的數據預測結果表/mm
從圖4可知,D25-1監測點垂直方向卡爾曼預測值、卡爾曼濾波值與原始觀測數據曲線的變化趨勢十分吻合,同時卡爾曼增益在經過三四次遞推運算之后迅速收斂且其值保持在約0.8。從圖4中卡爾曼濾波預測偏差曲線及表3中數據可以看出,卡爾曼預測值與原始觀測值的差值均很小且無發散現象,最后5期預測數據的偏差最大值<0.1 mm。這說明所建立的卡爾曼濾波模型是可靠的,所選取的濾波初始值也是合理的,能夠較好地反映測量機器人變形監測的實際情況,體現京滬高速鐵路在管道下穿施工期的變化規律,同時對監測數據實現精準預測。
4 結論
通過上述研究可知:
(1)設計的變形監測方案可實現水平、垂直方向分別<0.53和0.45 mm精度,較好滿足二等變形監測的精度要求,并在供水管道下穿施工期監測期間有效反映了京滬高速鐵路橋墩的真實位移情況,為供水管道穿越京滬線施工順利提供了有力保障。
(2)建立的卡爾曼濾波模型具有較高的擬合與預測精度,隨著遞推運算次數的增加,卡爾曼濾波預測值與原始觀測值的偏差呈現出逐漸變小至趨于穩定的趨勢,最后5期數據偏差的最大值<0.1 mm。
(3)建立的變形監測方案可快速構建且基本不受施工干擾,適用于類似高鐵橋墩等高精度變形監測領域,可在類似的變形監測領域加以推廣應用。
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
中國房地產業(2016年2期)2016-03-01 01:25:48
電源技術(2016年9期)2016-02-27 09:05:39
河南電力(2016年5期)2016-02-06 02:11:34
電源技術(2015年1期)2015-08-22 11:16:28
