層旋式升降立體車庫模擬系統設計與實現
2020-07-06 03:18:59王彩紅
中國房地產業·下旬 2020年4期
王彩紅
【摘要】立體車庫的使用是解決“停車難”的有效方法,因此研究立體車庫具有重要意義。本文以 2 層 12 車位的層旋式升降立體車庫為例,設計其實物模型及控制系統,并對其進行測試。測試結果表明,該車庫能夠自動的完成存取車操作及預先設定的一系列功能,工作穩定有序,為立體車庫實際應用提供了范例,同時也可以作為相關專業的教學儀器使用。
【關鍵詞】立體車庫;層旋式;模擬系統
1、引言
機械式立體車庫作為較新科技的停車設施,是解決停車難問題的妥善方法,也是中國城市現代化建設的必經之路[1-3]。
本文在塔庫式立體車庫的基礎上,設計了2 層 12 車位層旋式升降立體車庫實物模型和控制系統,并對其進行測試。從機械結構上,該車庫由托放車、垂直升降、旋轉停車平臺三部分組成,使得存、取車過程由三個獨立的機械機構完成,增加了各個運行過程運行周期的重疊區,減少了整體的運行時間;同時也使整個立體車庫的存、取車口的數量與位置能靈活的分配,減少用戶等待時間。
2、立體車庫模擬系統機械結構設計
本文設計的層旋式升降立體車庫,總共有三層。中心為垂直升降電梯,負責將車輛運往不同的樓層。從上往下第一層為地面層,在這一層設計了入口和出口供存車和取車使用;第二層為地下一層,在這層設有環形旋轉停車平臺,其下方的拖放車機構負責將車輛在升降電梯與停車平臺間傳送,第三層為地下二層,設計與第二層相同。電源模塊、控制器和繼電器布置在第三層下方。
立體車庫機械部分采用具有較好的強度,良好的抗腐蝕性能和較好的塑性,適合于各種壓力加工的鋁合金制作。
2.1環形旋轉停車平臺設計
本文將停車位設計在環形平臺,使原本固定的車位可以按照圓形軌跡運動,使立體車庫的運行更加靈活多變,提高了空間利用率,同時減少了在存車和取車時的等待時間。
每個環形旋轉停車平臺設有六個車位,每個車位都由數根金屬桿構成的梳形,拖放車垂直運動時可剛好穿過金屬桿的空隙托起車輛。在環形旋轉停車平臺下方設有圓形軸承軌道,停車平臺固定在軌道內圈,外圈固定在立體車庫框架上,內圈的內側裝有傳動帶,在齒輪電機驅動下使停車平臺可在軸承軌道上旋轉,并通過接近開關來確定位置。
2.2拖放車機構設計
拖放車機構安裝在地面層、地下一層和地下二層正對升降電梯處的下方,在存、取車過程中將車輛存入電梯或從電梯中取出,與其他機構協調運行,以完成整個存車入庫和取車出庫的動作。
拖放車機構中設計了兩條導軌,一條垂直布置,一條水平布置,以實現拖放車機構可實現二維的控制,來將車輛在兩個平臺間移動。與導軌平行安裝兩根齒輪桿,在齒輪電機的驅動下,該機構可完成上下和前后的移動,并在控制過程中通過微動開關定位運動的行程,使機構準確運動到位,保障拖放車動作順利、流暢的完成,避免車輛的損壞。
2.3垂直升降電梯設計
垂直升降電梯負責將車輛移動到各個樓層間。立體車庫中心有兩條垂直的滑動軌道和與其平行的齒輪桿,在齒輪電機的驅動下升降電梯可沿滑動軌道上下運動。通過布置在各樓層的接近開關,可以讓升降電梯精準的停留在對應樓層。
2.4主控制單元設計
主控制單元主要由下位機和上位機構成。下位機包括控制器S7-200 PLC,檢測單元接近開關和限位開關,和執行元件電機。上位機包括紫金橋組態軟件、 Access數據庫和車輛識別系統。PLC安裝在立體車庫的最下面,接近開關安裝在車位內和升降臺上,用于檢測當前車位中是否有車,以及更新樓層信息;限位開關分別安裝在車位左右兩側和井道頂層的上限位,用于檢測升降和橫移運動是否到位;電機用于控制載車板左右及上下移動。
3、立體車庫控制系統設計
3.1電源選擇
需要供電的設備有PLC、齒輪電機、接近開關和繼電器。PLC基本單元的供電形式有兩種:一是使用工頻交流電為PLC供電,直接將火線和零線與交流輸入端子連接;二是額外配備一個直流開關電源進行供電,將電源與直流輸入端子連接。本次設計采用第一種方式,直接使用工頻電。齒輪電機、接近開關和繼電器需要DC24V輸入,為了將控制電路與主電路隔離,所以額外配備一個AC220V轉DC24V的開關電源并通過繼電器控制齒輪電機。
3.2開關與PLC接線
西門子s7-200系列PLC的輸入單元與設備接線方式為匯點式輸入接線。全部輸入點分為幾組,每組有一個公共端。
3.3電機與PLC接線
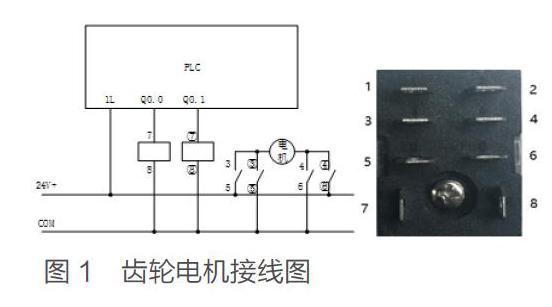
由于PLC本身帶負載能力有限,且外部短路時易燒壞繼電器,所以需要外加繼電器來控制齒輪電機,其接線方式如圖1所示。
4、立體車庫模擬系統測試
4.1 存車過程
模擬系統如圖3所示。當立體車庫收到來自上位機的存車信號時,先將車輛存地面停放位托起,放入垂直升降電梯的停放位,等待入口拖放車機構歸位后,入口垂直升降電梯下行到停車樓層;同時停車樓層的停車平臺轉動將停車位與入口垂直升降電梯對準;待入口垂直升降電梯到達且環形旋轉停車平臺對準后,停車樓層的拖放車機構將車輛從入口垂直升降電梯的停放位托出,放入環形旋轉停車平臺的停放位;入口垂直升降電梯上行歸為完成存車,并將存車信號復位。
4.2取車過程
當立體車庫收到來自上位機的取車信號時:出口垂直升降電梯下行到對應樓層;同時停車樓層的環形旋轉停車平臺轉動將停車位與出口垂直升降電梯對準;待出口垂直升降電梯到達且停車平臺對準后,停車樓層的拖放車機構將車輛從環形旋轉停車平臺的停放位托起,放入出口垂直升降電梯的停放位;等待停車樓層拖放車機構歸位后,出口垂直升降電梯上行返回地面層;出口拖放車機構將車輛從出口垂直升降電梯中托出,放入地面停車位完成取車,并將取車信號復位。
結論:
本文設計了2層12車位的層旋式升降立體車庫實物模型和控制系統。從車庫結構上,將托放車、垂直升降、車庫平面旋轉分成三個運行機構,三者分別動作,協調運行,運行周期短,部分機構故障不影響其他機構正常運行,更加安全可靠;從控制系統上,層旋式升降立體車庫采用了先進的PLC控制,運用西門子公司的編程軟件編制了車庫控制系統的程序,使得層旋式升降立體車庫操作的簡便易行,具有一定的推廣價值。
參考文獻:
[1]陳天勝,傅龍飛,任繼鋒.基于S7-1200升降橫移式三層立體車庫控制系統設計[J].工業儀表與自動化裝置,2017(1):102-105.
[2]張桂紅.智能旋轉立體車庫設計[J].電子制作,2017(2).
[3]程子健, 趙永強.機械式智能立體車庫的創新設計[J].內燃機與配件,2017(23).