基于3D 圖像重構的水分散粒劑在線混合分析方法研究
2020-07-07 06:08:56徐幼林鄭加強馬魯強丁鳳娟郭長皓
農業機械學報 2020年5期
關鍵詞:效果
代 祥 徐幼林 鄭加強 馬魯強 丁鳳娟 郭長皓
(南京林業大學機械電子工程學院,南京210037)
0 引言
作為近些年逐漸發展并廣泛應用的一種農藥劑型,水分散粒劑(Water dispersible granules,WDG)正逐漸得到廣泛關注,其原因在于農藥WDG 具有更為廣泛的毒理學和環境生物學意義[1-2]。目前,關于WDG 的變量施用研究仍處于起步階段[3-4],作為替代品的液體類農藥的精準變量施用技術已經逐漸成熟并實際應用[5-6]。
按照藥水是否分開盛放,農藥的精準變量施用可分為預混合式和在線混合式變量噴霧方式[7]。在線混合變量噴霧采用即混即用的策略,可有效避免預混合式變量噴霧中存在的剩余農藥浪費問題,這一優點在噴霧機操作者不知應該預混合多少藥水時尤為顯著,預混液不足會使得無效作業時間延長,預混液過量又會產生剩余藥水處理等問題,因此在線混合式的變量噴霧方式得到廣泛研究和關注[8-9]。然而,在線混合變量噴霧對于固體農藥卻難以直接應用,其原因一方面在于固體農藥的有效成分較高,施用量較低[1],另一方面固體藥劑的精量注入存在困難[2],因此結合在線混合式和預混合式二者的優點開發適用于固體農藥的變量噴霧系統,對于逐漸減小液體類農藥的使用非常有利[10-11]。并且對于任一含有在線混合這一特征的噴霧系統而言,藥水混合均勻性都至關重要[10]。
關于WDG 與水的在線混合,更高的顆粒分布均勻性有利于顆粒崩解后形成均勻的溶液,因此對于含有在線混合要素的噴霧系統而言,提高WDG崩解后混合均勻性的前提是WDG 分布的均勻性[3]。目前,許多科研人員對農藥在線混合效果開展了研究,但主要集中在液體類農藥的在線混合效果評價方面。VONDRICKA 等[12]采用數值模擬方法研究了液體農藥的混合過程,從而保證了高效的混合室設計;DOWNEY 等[13]采用NaCl 溶液基于導電性在時間序列上的變化測試評估了農藥的在線混合效果,受制于農藥注入時可能存在的脈動特征,該方法無法獲得任意時刻的在線混合均勻性;SUDDUTH 等[14]用氦氖激光系統和變異系數評價噴桿式噴霧機在線混合的濃度均勻性,該方法同樣存在特征值是建立于時間序列上的缺陷;此外,采用流場內置傳感器并實時獲取流體樣本的方法[15]同樣對于WDG 與水在線混合的均勻性評估意義不大,原因在于這些方法會擾動流場,造成計算不夠準確,并且分散采樣獲取的流動樣本難以反映任一時刻WDG 在管路截面上的分布情況。
由于WDG 具有一定的宏觀特征,如顆粒顏色、大小及形狀[1]等,可以采用圖像方法對WDG 與水的在線混合效果進行評估。徐幼林等[16]使用聚苯乙烯顆粒跟蹤流體運動,并用高斯分布統計量對混合均勻性進行了初步計算,但是其評估過程基于單視角圖像,存在準確性不足的問題;DAI 等[17]采用圖像方法分析了多種農藥的在線混合效果,但是其方法針對液體農藥,難以直接應用于WDG 的混合效果評估;SLETTENGREN 等[18]采用近紅外成像研究了脂基粉末間的混合特性,由于近紅外與可見光圖像成像波段有較大區別,故其研究側重于類流體狀態微細粉末的混合,而非具有宏觀特征的農藥顆粒,同時其試驗投入也較大;LIU 等[19]評估了用于顆粒間混合效果評價的諸多方法,由于不同顆粒間特征差異較大,故其研究方法及結論并不直接適用于WDG 與水在管路中的混合情況;PARK 等[20]同時評價了兩種顆粒在管路軸向及徑向上的混合效果,但是其方法針對開放系統,通過獲取樣本來完成,因此并不適合封閉管路中WDG 與水在線混合效果的評估。總之,圖像方法可以用于顆粒分布的度量,但是針對WDG 與水在線混合效果的評估,已有方法尚不可行。
為了合理評價WDG 與水在線混合效果,解決含有在線混合特征的變量噴霧系統中WDG 與水在線混合效果評價的難點問題,借助流體圖像采集裝置,基于獲取的農藥WDG 代替物的雙視角在線混合圖像,構建三維坐標下模擬粒子在水中的立體(3D)分布圖像,提出藥水在線混合效果評價方法,以期為流場中粒子運動特性提供參考,從而為農藥WDG 在線混合效果的定量分析,開發高性能在線混合裝置、評價農藥WDG 在線混合應用條件提供技術支持。
1 材料與方法
1.1 系統原理
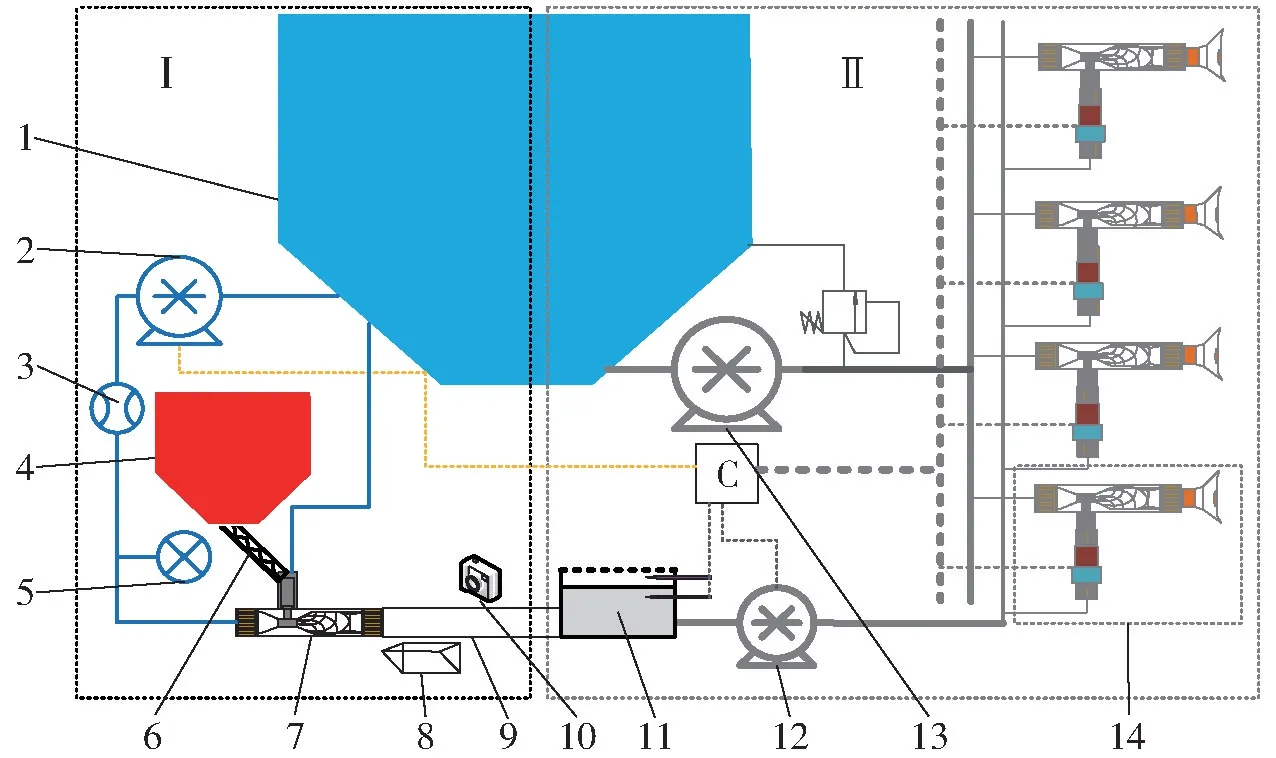
圖1 WDG 在線混合變量噴霧試驗系統原理圖Fig.1 Schematic of inline mixing variable-rate spraying system for applying WDG
完整的WDG 在線混合變量噴霧試驗系統如圖1 所示,用于WDG 與水在線混合的試驗子系統如部分Ⅰ所示。初混水泵用于輸送動力液體進入射流混藥器;WDG 儲存于藥箱中,并經WDG 輸送器在射流混藥器吸入液體的幫助下進入載流,射流混藥器實現藥水在線摻混后將WDG 與水的混合液輸送至水平檢測管中,因此,若WDG 能夠在水平檢測管中充分均布并最終完全崩解,則圖1 中變量噴霧系統Ⅱ中用于藥液緩沖的藥箱可以進一步縮小并有可能取消,從而在簡化系統配置及控制的同時還能確保藥水混合效果以及噴霧質量。高速相機采集水平檢測管中WDG 與水在線混合的實時水平視角圖像,全反射三棱鏡采集檢測管中靠近射流混藥器出口位置垂直于相機方向的圖像,用于WDG 位置信息的實時三維重構。試驗過程中需要確保高速相機、全反射三棱鏡以及水平檢測管三者間位置的固定性。經過實際安裝檢測,高速相機鏡頭與水平檢測管前側面的距離為40 cm,全反射三棱鏡垂直面平行于高速相機成像平面,全反射三棱鏡水平面平行于地面,直角棱線平行于檢測管[7],以盡量減小圖像重構過程中可能出現的誤差。
1.2 試驗材料
鑒于直接采用農藥WDG 進行在線混合可能會帶來一定的操作風險,因此選擇替代的粒子進行WDG 的模擬。根據文獻[1],農藥WDG 的構成主要包含分散劑、潤濕劑、滲透劑、填料、崩解劑、粘結劑以及潤滑劑等,不同顆粒成分以及造粒方式所導致的物理性質差異主要在于顆粒的大小、孔隙率、堆密度以及密度等。因此,用于代替WDG 的模擬粒子首先應具有不同的尺寸及密度特征,這會形成明顯的顆粒沉降速度差別,從而用于替代不同造粒直徑、不同成分的農藥WDG 顆粒。根據研究和分析,模擬顆粒可以用表1 所示粒子替代[1]。可見等效直徑越小,密度與水更為接近的模擬粒子,具有更小的沉降速度。需要指出的是,模擬顆粒并不能完全表征農藥WDG 特性,如崩解性,但是考慮到WDG 顆粒在快速崩解后的混合效果直接受制于顆粒崩解前的分布效果,因此考察模擬顆粒的分布仍具有顯著意義。

表1 模擬粒子屬性Tab.1 Simulation particle attributes
1.3 試驗方法
1.3.1 圖像采集
為了構建基于3D 圖像重構的混藥器混合WDG分析方法,需要首先采集合適的WDG 與水在線混合圖像,由于顆粒直徑越小的粒子進行圖像識別的難度越高,因此以顆粒直徑最小的PS 粒子為對象采集示例圖像;設置載流流量Q 為初混水泵的最高流量2 000 mL/min,其也是在線混合噴霧中常用的較高載流流量[7],以快速向藥液緩沖箱中補充藥水混合原漿,在檢測管內徑為1 mm 的條件下,載流流速高達0.25 m/s,設置高速相機幀率為250 f/s,幀間時間間隔Δt 僅為0.04 s,設置相機曝光度為39.4 ms;設置顆粒相含率C 為0.5%。
試驗開始前需先拍攝同等環境下無WDG 的圖像,如圖2a 所示;然后再拍攝顆粒實際流過時的圖像,隨機選取的第1 幀在線混合原始圖像如圖2b 所示,可見上述相機設置實現了顆粒圖像的清晰采集,通過圖像差分操作可以迅速去除圖2b 中的絕大部分噪聲,如圖2c 所示。與圖2b、2c 緊鄰的第2 幀圖像如圖2d、2e 所示;每一幀圖像中上半部分均為相機水平視角混合圖像,下半部分均為通過全反射三棱鏡采集的相機垂直視角圖像。通過這兩幀連續圖像進行分析方法的構建。
1.3.2 算法驗證

圖2 WDG 分布圖像采集過程Fig.2 Image acquisition for WDG distribution
為了驗證算法的正確性,進一步設計了多種工況用于對所提出的方法進行測試,由于粒子圖像的處理很容易受粒子加入量的影響,當粒子加入量過多時,可能會帶來算法失效的問題,因此進一步采集Q=2 000 mL/min、C=1.0%下的圖像;此外,為了驗證Q 對算法的影響,進一步設置Q=1 400 mL/min、C=0.5%的試驗組進行算法驗證。
1.3.3 模擬粒子的在線混合試驗
在提出基于3D 圖像重構的混藥器混合WDG分析方法后,可對4 種不同模擬粒子的在線混合效果進行實際測試,測試工況為:Q =2 000 mL/min,C=0.5%。對連續采集1 s 獲得的250 幀圖像進行檢測,重復試驗3 次,以減小試驗誤差,用于考察一定流場下,不同特性WDG 顆粒的混合效果。
2 基于3D 圖像重構的分析方法
2.1 WDG 分布圖像預處理
通過對圖2a 中的管道邊緣局部圖像作霍夫直線檢測[21],從而獲取水平視角及垂直視角圖像中檢測管內的上下邊界,并據此提取具體的粒子活動區域,即水平視角及垂直視角的ROI (Region of interest)圖像,圖3a 為第1 幀圖像的ROI 提取結果,經實測,兩視角圖像的高度均為140 像素,圖像的寬度約為250 像素。由于圖3a 圖像中仍存在一些噪聲,并且整體圖像亮度偏暗,這有可能使接下來的粒子分割產生較大誤差,因此在圖像預處理中,首先進行圖像中值濾波,然后進行圖像的亮度變換,使得調整后的圖像灰度占據全部灰度級范圍,從而得到圖像預處理結果,為下一步的圖像分割做準備,如圖3b 所示。
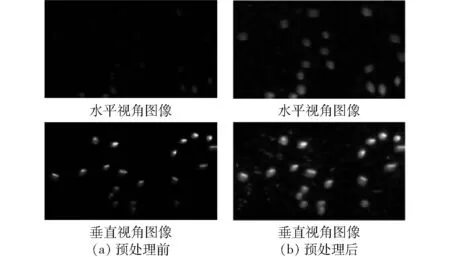
圖3 WDG 在線混和水平及垂直視角圖像預處理Fig.3 Image pre-processing in vertical and horizontal viewing directions
2.2 粒子圖像的分割及形態學處理
采用迭代式閾值分割方法對圖3b 進行處理[21-22],如圖4a 所示,分割結果盡量避免了氣泡干擾,且對粒子圖像的粘連具有良好的區分效果。由于經過閾值分割的粒子圖像仍存在未能完全去除的氣泡以及粒子粘連,因此采用形態學運算中的開運算方法對圖4a 圖像進行先腐蝕再膨脹,實現進一步的粒子圖像分割以及噪聲去除,如圖4b 所示。然后對所獲得的圖像進行粒子邊緣提取,邊緣提取同樣基于形態學運算完成,通過將圖4b 中圖像減去經3 ×3 塊的9 點元素腐蝕的圖像,即可獲得粒子的邊緣圖像,用于下一步粒子圖像特征的提取,結果如圖4c 所示。
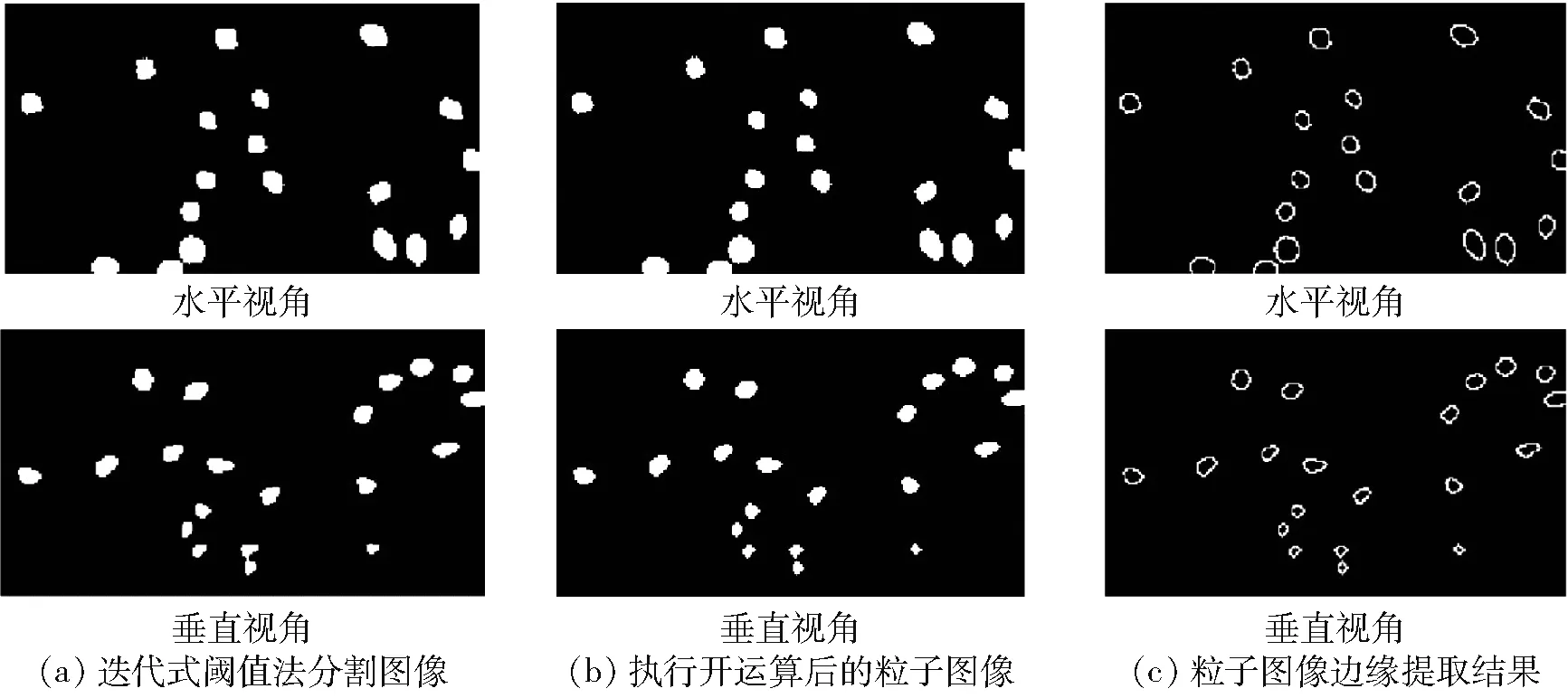
圖4 第1 幀粒子圖像的閾值分割及形態學處理Fig.4 Particle image segmentation and morphological processing of particle image frame 1
2.3 粒子圖像質心及轉動慣量參數提取
為了實現粒子的匹配,包括水平與垂直視角方向上粒子的匹配,以及時間序列上前后幀間粒子圖像的匹配,結合物理學概念,采用灰度質心表征粒子的位置坐標,而采用歸一化轉動慣量I(Normalized moment of inertia)作為粒子的形態特征[23]。
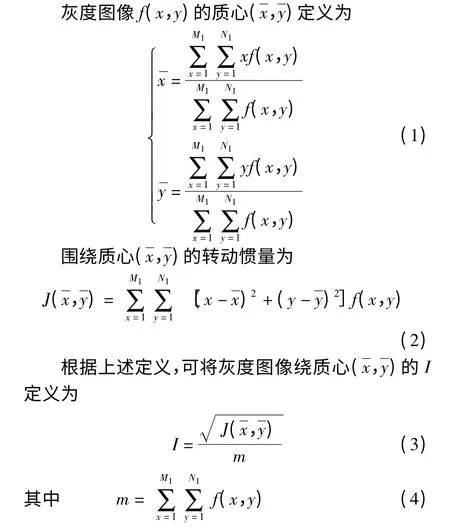
式中 m——圖像的質量,表示像素值的累加
圖5 為粒子坐標系的設置,表2 為用上述方法對第1 幀圖像進行計算所獲得的兩視圖中粒子質心坐標及對應I 值。
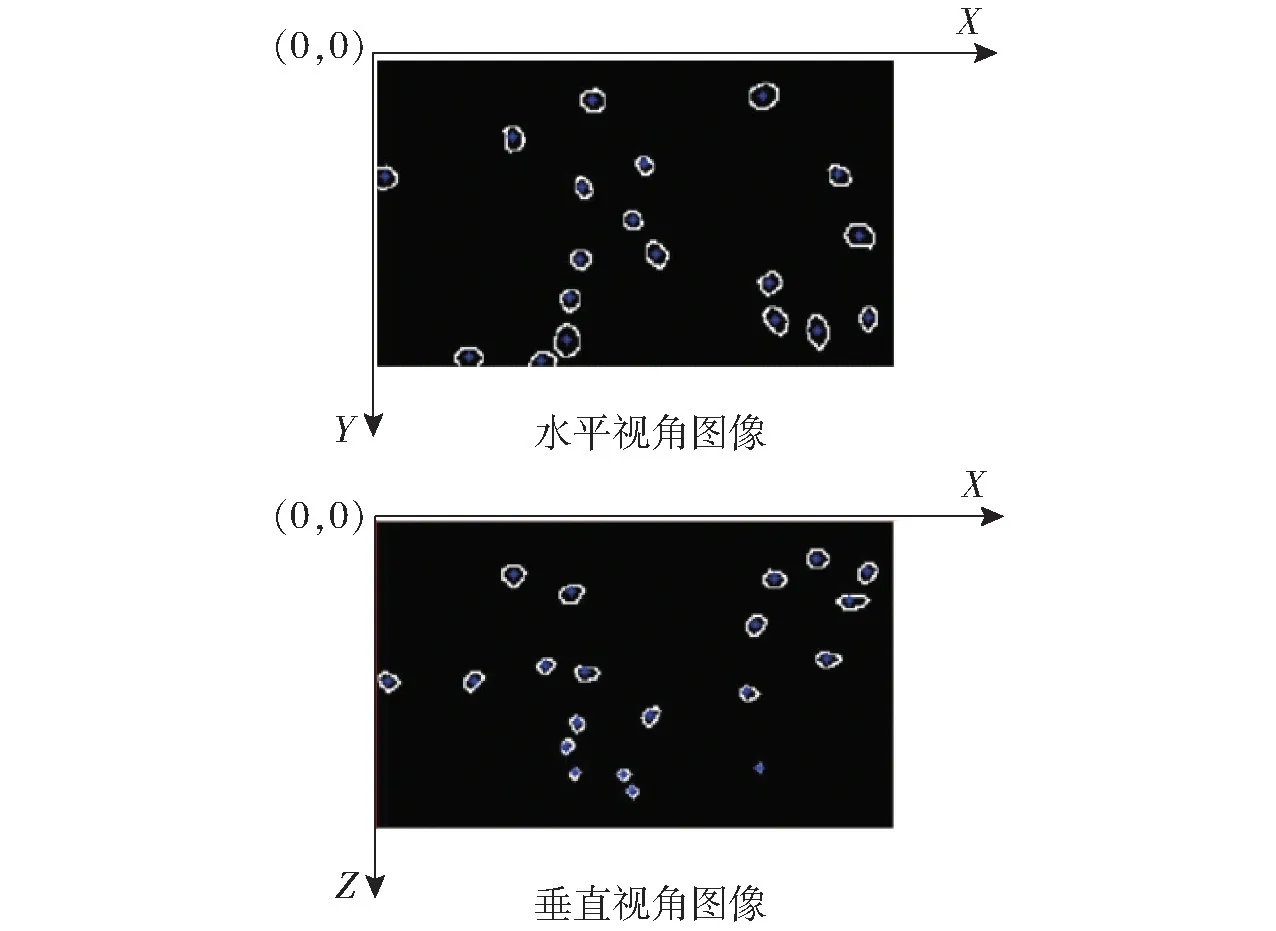
圖5 多視角粒子定位圖像及坐標系Fig.5 Multi-view particle positioning image and coordinate system
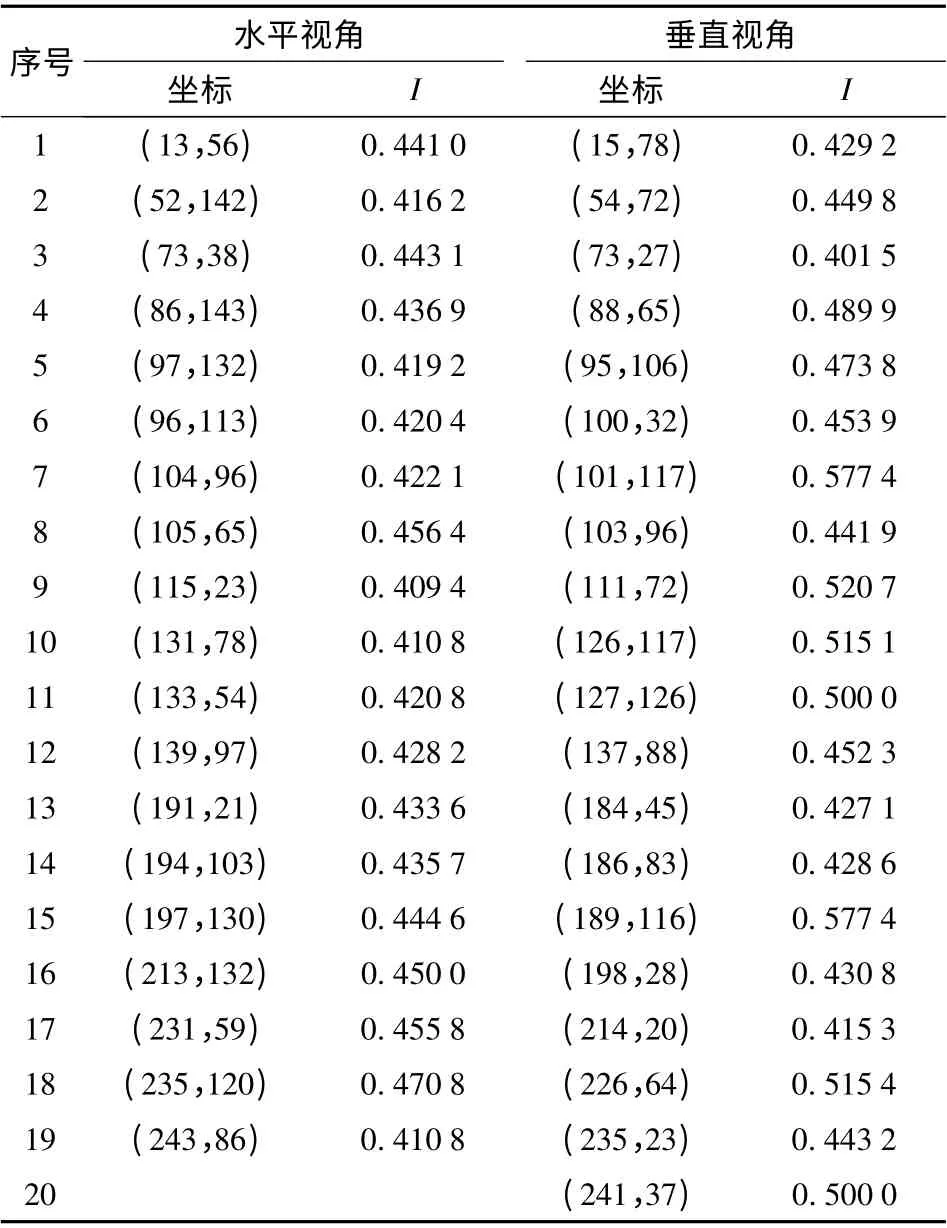
表2 第1 幀圖像雙視角中粒子質心坐標及I 值Tab.2 Extraction of particle attributes in both viewing directions for image frame I
2.4 雙視角粒子圖像匹配及初步三維重構
為了能夠有效地將水平視角以及垂直視角中的粒子進行匹配,并根據水平視角及垂直視角中的粒子坐標重構出三維坐標系下的粒子空間坐標,可采用橫坐標的一致性作為判據。由于相機鏡頭水平安放,并垂直于檢測管的軸線以及三棱鏡的直角棱線,且相機鏡頭距離檢測管僅40 cm,因此在重構中不考慮鏡頭的畸變效應[24],且檢測管壁僅為1.5 mm,也使得粒子圖像在Y 軸以及Z 軸上的位置校正變得冗余,即忽略玻璃管壁對粒子的折射效果。水平視圖提供了粒子圖像(x,y)坐標信息,而垂直視圖提供了(x,z)方面的信息,因此匹配并三維重構的粒子圖像即具有(x,y,z)信息,為減小兩視角中配對粒子X 坐標的微小誤差,在最終重構出的粒子三維坐標中,X 坐標采用兩視角對應粒子的平均值。由表2 可見,第1 幀圖像中水平視角中有19 個粒子被檢測到,而在垂直視角中卻有20 個粒子,這說明水平視角中至少有一個粒子存在視圖重疊的情況,需要通過算法進行填充,通過在缺省數列中隨機填充粒子,并使得兩視圖中橫坐標間的歐氏距離最小化,即可以獲得正確的填充數列,從而使得兩視圖中的粒子數相等,并進行基于橫坐標一致性的粒子匹配。匹配算法如圖6a 所示。
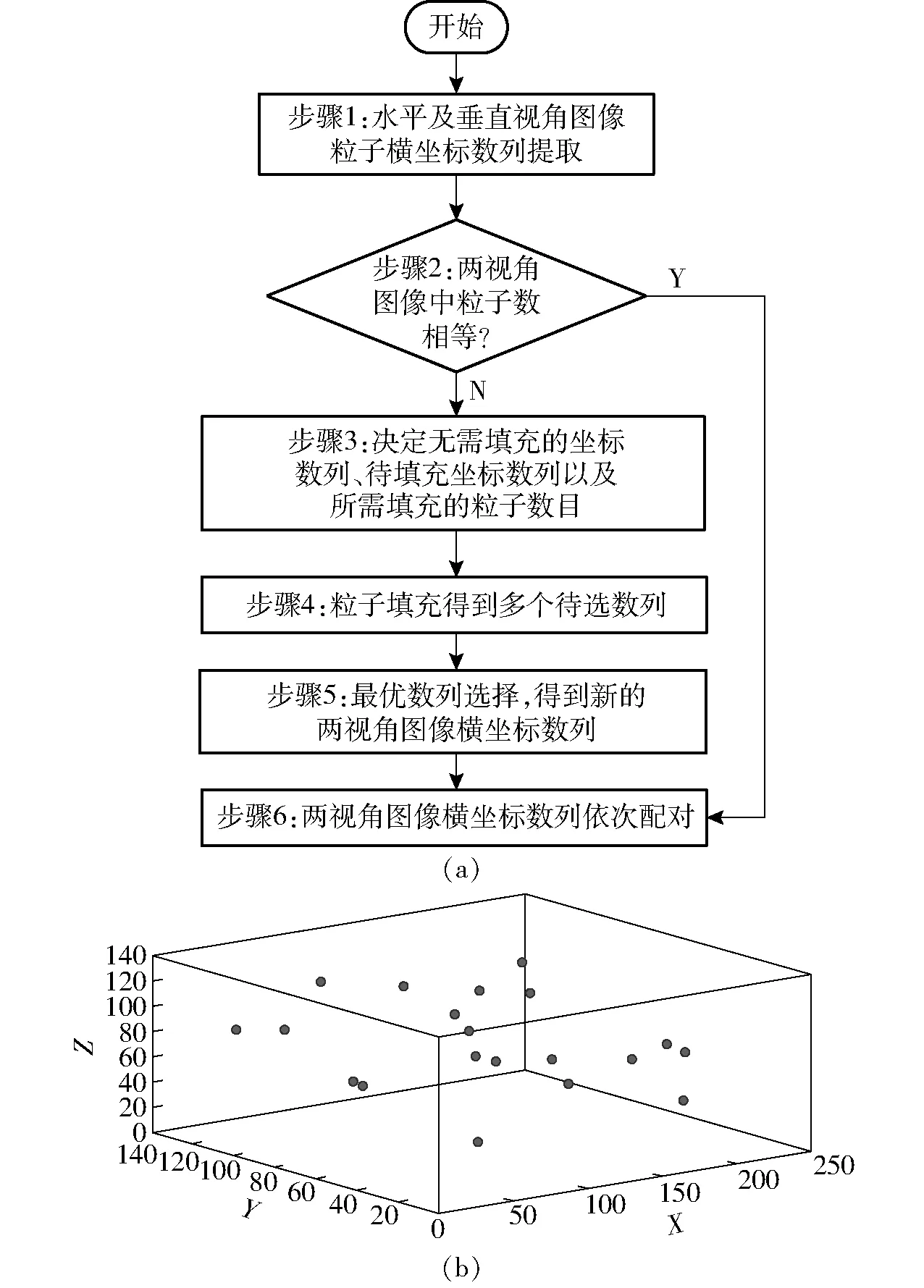
圖6 粒子三維圖像重構算法步驟以及初步重構的第1 幀三維粒子圖像Fig.6 Particle 3D image reconstruction algorithm flow chart and image of initial reconstructions for frame 1
通過步驟1,可得

式中 X(1)——水平視角提取的粒子橫坐標數列
a——水平視角中粒子數目
X(2)——垂直視角提取的粒子橫坐標數列
b——垂直視角中粒子數目
步驟2 判斷兩視角圖像粒子數目是否相等,若相等則直接對X(1)和X(2)進行步驟6 的依次匹配;否則進入步驟3,得待填充粒子數N、最大粒子數M、待填充數列X(l)、無需填充數列X(m)
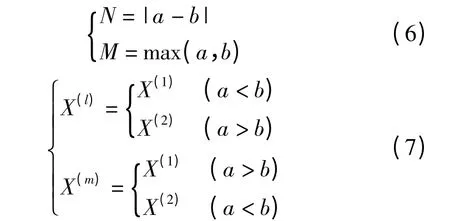
步驟4 獲得ANM個由X(l)及缺省位置的鄰值構成的待選數列X(w),步驟5 通過使得X(w)及X(m)分別所形成的向量X(w)和X(m)間的歐氏距離最小化,從ANM個待選數列X(w)中選擇最優數列

步驟6 中將X(new)和X(m)進行依次匹配即可實現粒子空間坐標的初步重構。
根據該算法重構出的第1 幀初步粒子空間圖像如圖6b 所示。
2.5 粒子空間分布均勻度計算方法
在獲得重構的粒子空間分布后,即可以有效度量粒子空間分布的均勻程度。鑒于粒子空間分布均勻性具有不同的定義,因此選取最普遍的定義方法,即將粒子空間分布的均勻程度定義為空間各部位所含粒子量的一致性[7,25],因此提出體積加權的粒子空間分布均勻度指數γα,計算式為
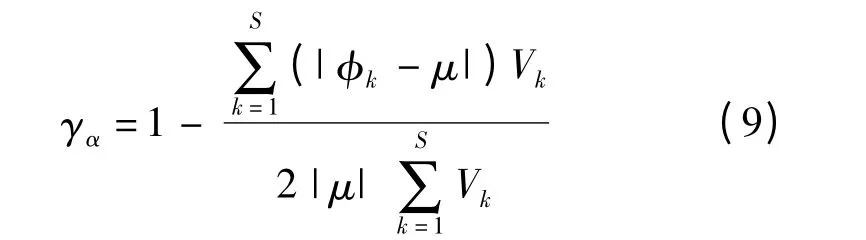
式中 φk——控制體分塊內顆粒含量
μ——控制體內平均顆粒含量
Vk——控制體分塊體積
S——控制體內分塊數目
γα越高,則粒子空間分布越均勻。
試驗中所采用的檢測管控制體為柱體,因此需要對上述直角笛卡爾坐標系內的顆粒坐標(x,y,z)轉換為空間柱面坐標(x,r,θ),從而方便在柱形計算域內實現均勻性的求解。
2.6 粒子三維圖像空間速度矢量求解方法
(1)基于連續幀圖像空間粒子匹配的測速方法
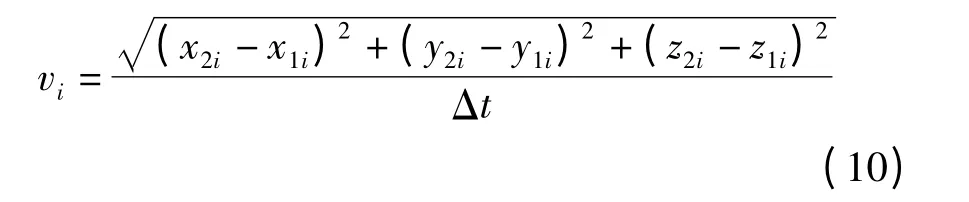
為了準確獲得三維空間中粒子的速度矢量,首先要能夠準確地對連續圖像中空間粒子進行跟蹤與匹配,為了實現該過程,由于農藥WDG 在線混合應用中的C 普遍較低,且連續兩幀圖像中運動粒子的運動距離普遍較小,因此提出采用適合于稀相輸送粒子跟蹤的近鄰檢測方法以及基于粒子I 特征匹配相結合的方法實現連續圖像間粒子的匹配。則粒子移動速度vi可定義為
基于近鄰檢測的粒子追蹤表示為

其中

式中 lw——檢測管中的液體幀間平均流動距離
Δt——幀間時間差,本文為0.04 s
γ——檢測管的成像直徑,本文為140 像素
α——鄰域系數,本文取0.2
對于第1 幀圖像中的粒子(x1i,y1i,z1i),第2 幀圖像中符合近鄰檢測的粒子集為{(x2i,y2i,z2i)},則進一步采用基于I 值的特征匹配方法從粒子集中選擇同第1 幀粒子中最為相似的粒子,從而實現粒子的匹配以及速度求解,選擇過程中需要保證兩粒子間在兩個視圖方向上的I 差異均最小化。
需要指出的是,依靠上述方法并不能絕對保證圖像中每個粒子均實現精準的幀間粒子匹配,除了不同幀之間存在粒子進入ROI 或從ROI 中逸出的原因之外,空間粒子坐標的誤重構也是一個必須考慮的因素。由于粒子的重構是基于橫坐標的一致性進行的,因此不同幀之間對應粒子的X 坐標不存在誤判情況,誤判的情況僅存在于Y、Z 方向,且誤判粒子成對存在。因此,在粒子幀間匹配及速度計算時,{(x2i,y2i,z2i)}為空集時,對該成對誤判粒子的Y 坐標或者Z 坐標進行互換,糾正粒子重構坐標后重新進行匹配。糾正后仍呈空集的,則放棄對該粒子進行測速,但是該粒子仍可用原始坐標參與均勻性的計算。表3 為基于第1 幀及緊鄰的第2 幀所重構的粒子三維坐標,采用時間序列幀間粒子對應關系校正的連續兩幀粒子分布圖像如圖7所示,可見連續兩幀之間粒子的對應關系較好,并且粒子坐標均分布在直徑為140 像素的柱體內,表明算法具有可行性。以該柱體為計算域求解的第1 幀圖像及第2 幀圖像的粒子空間分布均勻度分別為0.078 3 和0.079 3。
表4 為根據上述連續兩幀圖像,通過粒子空間移動距離及幀間時間差計算所得的粒子移動速度,可見流場中不同粒子的移動速度具有差異性,這體現了流場的不規則性,有些鄰近的粒子由于這種不規則性甚至呈現出較大的速度差異,如第17 號至19 號粒子,同時,這些粒子的運動速度矢量與Y 軸的夾角并不總在π/2(1.57)左右,表明粒子在檢測管內的運動并不局限于單一方向,有些粒子隨流場克服重力向上運動,而有些粒子則向下運動;經求解,各粒子沿X 軸方向平均速度為178.13 像素/s。
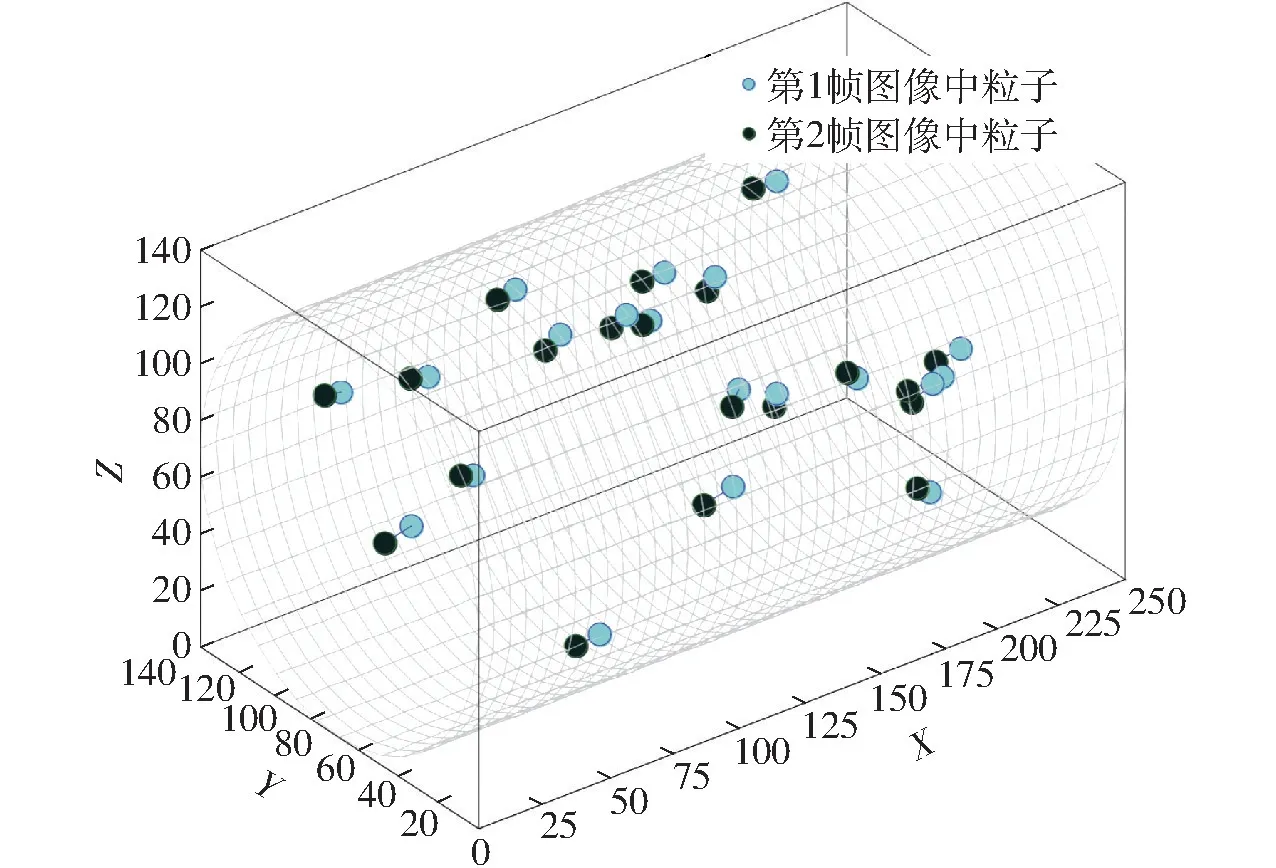
圖7 基于連續兩幀匹配的三維粒子重構最終結果Fig.7 Final particle 3D image reconstruction based on consecutive two images
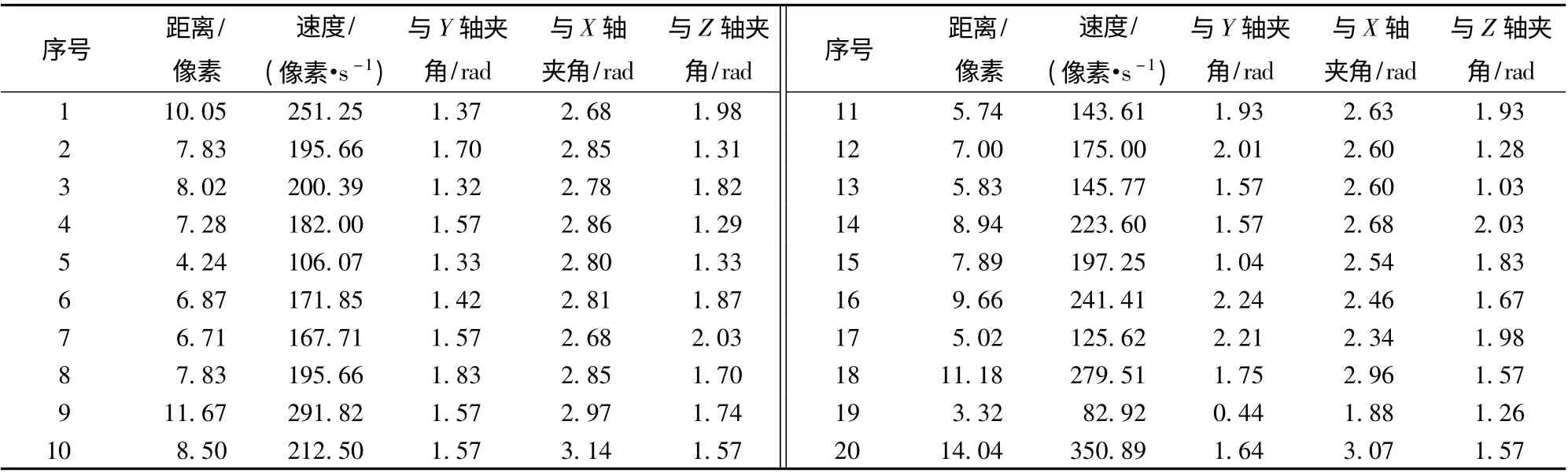
表4 第1 幀及第2 幀圖像間粒子空間移動位移參數Tab.4 Particle space-shifting parameters between frame 1 and frame 2
(2)基于互相關算法的粒子速度驗證
為了驗證上述算法對顆粒跟蹤的準確性,采用圖像測速中最常用的互相關算法對基于3D 圖像重構的算法中粒子速度進行驗算。互相關算法指的是對連續兩幀圖像進行互相關運算,獲得函數最大值時對應兩幀圖像間的運動位移[26],通過對雙視角連續兩幀圖像的同時處理,即可獲得對應粒子的移動速度。圖8 為采用互相關算法以及本文所提出的基于3D 圖像重構的粒子測速結果。可見對于大部分粒子,兩種方法對各粒子速度大小的求解結果基本一致,且粒子速度在矢量特性上的差異性更小,僅有個別粒子的速度差別較大,表明本文提出的方法整體具有可行性;存在的差異主要是由于自相關算法未基于粒子在三維空間中的精確定位,而是分別基于單視角圖像中粒子運動速度求解,并最終基于兩視角中對應粒子速度的合成,缺少了精確的粒子匹配環節所造成的,換言之,僅基于自相關計算,可以準確實現單視角條件下的粒子追蹤,但是卻為3D立體條件下粒子追蹤帶來了不準確性,因此本文提出的基于粒子3D 重構并求解粒子運動狀態的方法相對于自相關算法在單個粒子的速度求解方面具有優勢。
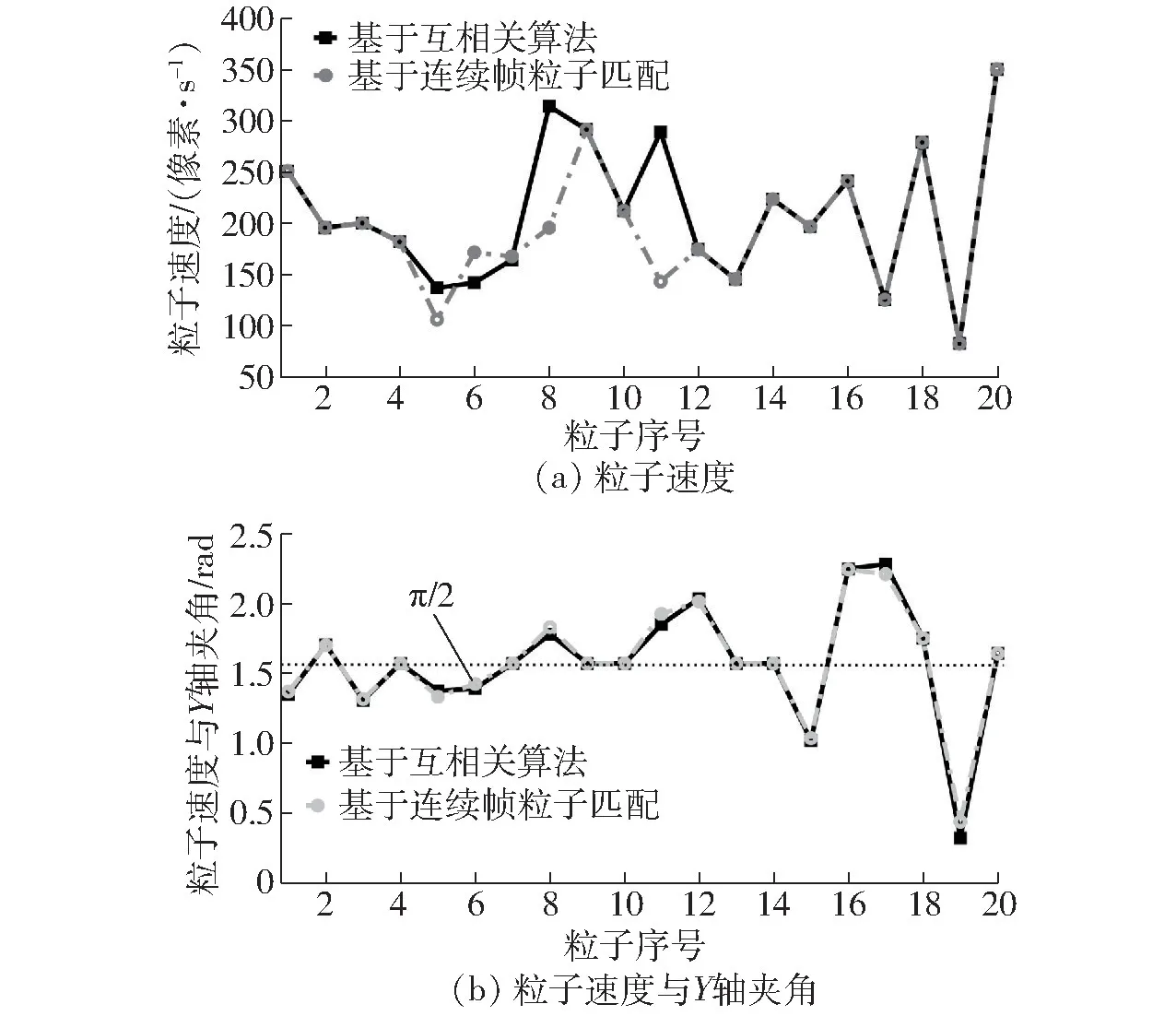
圖8 基于互相關算法和基于連續幀圖像空間粒子匹配的測速結果比較Fig.8 Comparisons of speed measurement results based on cross-correlation and particle continuous-frame matching
2.7 不同工況下的算法正確性驗證
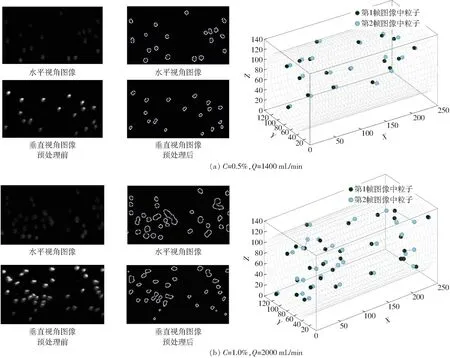
圖9 不同工況下的分析方法正確性驗證Fig.9 Correctness verification for proposed analysis methods
C 為0.5%,Q 為1 400 mL/min 對應圖像處理過程如圖9a 所示,圖像分割及粒子匹配良好,根據各粒子速度矢量求解可知粒子在Q =1 400 mL/min條件下在X 軸方向運動平均速度是125.00 像素/s,與Q=2 000 mL/min 時的粒子速度178.13 像素/s 呈比例對應關系,這進一步證明了基于連續幀圖像空間粒子匹配測速方法的準確性,說明粒子水平運動速度與載流流速對應。圖9b 為Q =2 000 mL/min,而增加C 至1.0%所呈現出的粒子分割及匹配結果,可見在粒子密度較高的條件下仍會呈現出一定的粒子粘連現象,但由于算法對缺省粒子進行了填充,因此仍舊實現了粒子圖像的3D 重構,并且由于對連續幀圖像中粒子匹配進行了自動調整,從而有效避免了粒子的誤匹配,所求解X 方向速度為175.40 像素/s,與Q=2 000 mL/min,C =0.5%所得結果(178.13 像素/s)近似,同樣證明了算法的可行性。
3 模擬粒子在線混合試驗結果與討論
4 種模擬WDG 粒子在線混合均勻性比較如圖10 所示,可見不同粒子在同一C 下的均勻性效果存在差異,并且隨著粒子的沉降速度增大,其混合分散效果逐漸變差,PS 粒子的γα達到0.062,而Rapeseed 粒子卻僅有0.021,造成這種狀況的原因在于,即便射流混藥器的流場湍動效果較強導致粒子能夠初步分散,但是粒子的持續懸浮仍要求流體運動對粒子所產生的曳力能夠克服粒子的重力,因此不同的粒子特性也使得其在線混合效果存在差異。WDG 在線混合系統中,由于WDG 的快速均勻混合要求WDG 均勻分散,因此應用沉降速度較大的WDG 時尤其需要重視其在線混合均勻性問題。
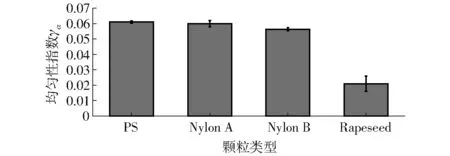
圖10 不同種類粒子在線混合均勻性比較結果Fig.10 Uniformity comparison for different kinds of simulating particles
由于粒子的沉降速度與在線混合均勻性效果存在對應關系,因此著重考慮重力方向上(Y 方向)連續1 s 內粒子運動速度矢量偏向于重力方向的概率。如圖11 所示,除了PS 粒子,Nylon A、Nylon B和Rapeseed 這3 種粒子均表現出運動速度方向同Y軸方向夾角平均值小于π/2 的特征,表明這些粒子均具有向Y 軸正方向,即向下運動的趨勢。并且,隨著粒子沉降速度的增加,其夾角平均值越小,表明其受重力作用向下運動的趨勢越明顯,同理,粒子向下運動的概率也越大,任意時刻,在流場和重力的雙重作用下,Rapeseed 約有64%的概率會向下運動,而這個概率對于PS 粒子來說僅有57%。此外,PS粒子的垂直運動角為1.58 rad (>π/2),表明部分PS 粒子在載流的作用下向上運動趨勢較其它粒子更為明顯,考慮到PS 粒子與水的比重僅為1.05,近似于水,這說明PS 粒子更能直觀反映純液體流場的特征,可能具有作為流場示蹤粒子應用的潛力,而其它沉降速度較大的粒子則很難獲得這種均勻分散的效果。然而,由于實際農藥WDG 在線混合應用中存在的崩解特性,且崩解后顆粒直徑減小,因此理論上隨著混合時間的延長,初始條件下難以均勻混合的顆粒的流化能力應有所增強,這可能會提高其崩解過程中顆粒與水的混合效果,從而促進藥水混合,但是這仍需進一步的試驗支持。
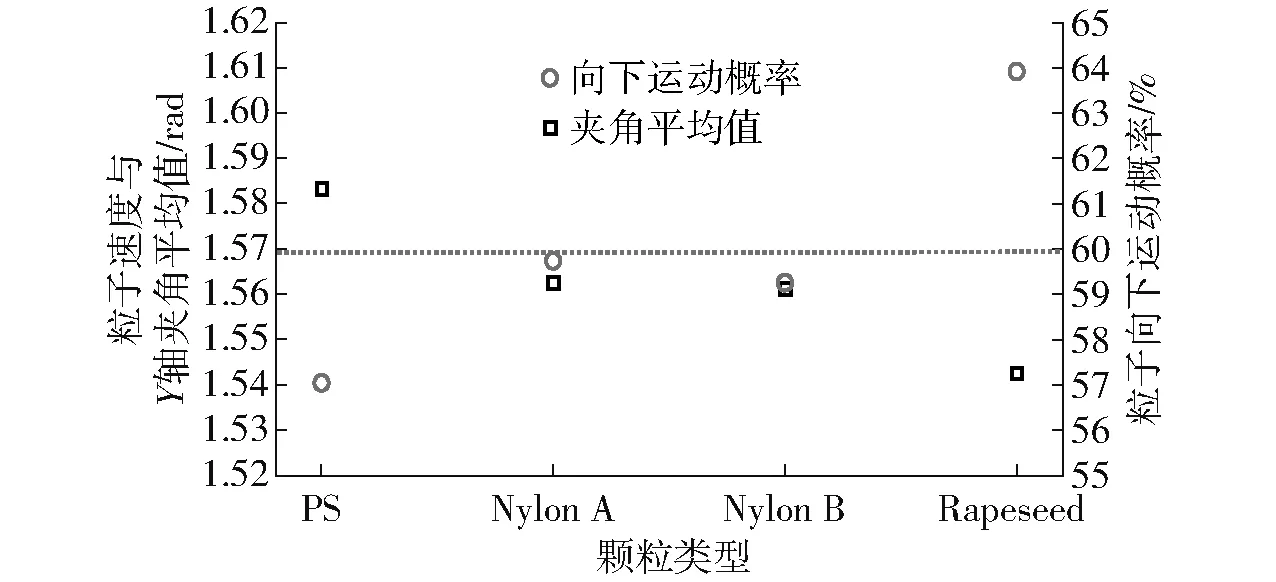
圖11 不同種類粒子流場運動速度方向比較Fig.11 Velocity comparison for different kinds of simulating particles
4 結論
(1)搭建了用于農藥水分散粒劑(WDG)在線混合效果評估的試驗系統,借助全反射三棱鏡的反射效果,同時采集檢測管中WDG 顆粒的水平視角及垂直視角圖像,用于三維粒子分布圖像的重構,從而實現基于3D圖像的農藥WDG 在線混合效果分析。
(2)對原始圖像進行背景差分、對比度拉伸、迭代式閾值分割處理后,可對粒子質心坐標及粒子歸一化轉動慣量(I)進行提取。根據水平與垂直視角圖像中粒子橫坐標的一致性進行雙視角圖像中粒子的匹配,對由于單視角中粒子重合造成的粒子缺省進行基于橫坐標間歐氏距離最小化的粒子填充,從而完成粒子三維圖像的初步重構;根據連續圖像中粒子運動速度的非突變性,對粒子空間坐標進行校正,從而實現粒子空間坐標的最終三維重構。根據粒子三維重構圖像提出了基于空間體積加權法的粒子空間分布均勻度計算方法;根據連續幀圖像中粒子的位置分布及特征(I)相似性,實現連續幀間粒子的匹配,從而完成時間序列上粒子運動速度及運動方向的求取。不同工況下的測試驗證也表明,盡管較大的粒子相含率下圖像分割仍存在一定缺陷,但所提出的方法能夠有效應用于農藥WDG 在線混合效果的評估。
(3)對4 種具有不同沉降速度的模擬WDG 顆粒進行了實際在線混合測試,結果表明,粒子的沉降速度越小,其在線混合效果越好,相應地,其沿重力方向運動的趨勢越弱,向下運動的角度也越小;考慮到WDG 的快速均勻混合需要WDG 均勻分散,因此應用沉降速度較大的WDG 時,尤其需要重視其在線混合均勻性問題,相應地,顆粒更小、密度與水更為接近的粒子,如直徑為0.8 mm的PS 顆粒,其混合均勻度更高。今后需針對實際農藥WDG 顆粒展開具有崩解特性條件下的均勻性及流動測試,以進一步促進農藥WDG 的在線混合變量噴霧應用。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學生學習指導(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學生學習指導(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
