高過載姿態測量中MEMS陀螺失效模式與研究進展
2020-07-07 09:23:40李東杰
壓電與聲光 2020年3期
關鍵詞:結構
青 澤,牟 東,廉 璞,李東杰
中國工程物理研究院 電子工程研究所,四川 綿陽 621999)
0 引言
目前,世界各軍事強國均在開展常規武器彈藥的制導升級工作,其主要目的是實現在彈藥發射后實時測量彈藥的姿態信息,為彈道修正提供基準,以有效提高彈藥的命中精度[1-2]。同時,為有效打擊深埋于地下的高價值目標,各國在侵徹武器的發展中也增加了實時測量彈體姿態的要求,以保證戰斗部的作戰效能[3-4]。為滿足越來越多的實時姿態測量需求,主要的技術手段是在炮彈中增加慣性制導模塊[5],利用慣性傳感器(加速度計和陀螺儀)實時測量彈藥的加速度和角速度信息,進一步得到彈藥的姿態信息。
隨著微機電系統(MEMS)技術的發展,各類微慣性傳感器(MEMS加速度計和MEMS陀螺)的精度不斷提高。與傳統慣性傳感器相比,微慣性傳感器具有體積小,質量小,成本低,可批量生產及可靠性高等特點[6-7],因此,世界各國都將其作為制導炮彈中慣性傳感器的首選。但在高過載條件下,各類微慣性測量器件,尤其是MEMS陀螺的性能會隨著過載的增加發生顯著變化,主要表現為兩大問題[8-9]:
1) 經歷高過載過程后,MEMS陀螺完全失效,無法使用。
2) 高過載過程后,MEMS陀螺仍能使用,但性能嚴重退化。
因此,研究在高過載條件下MEMS陀螺的失效模式,對利用微慣性傳感器實現高過載姿態測量具有重要意義[10]。
本文以高過載MEMS陀螺為中心,充分調研有關高過載條件下MEMS陀螺的研究資料,從典型高過載環境及高過載環境下MEMS陀螺失效模式等方面進行歸納總結,詳細介紹了國內外抗高過載MEMS陀螺的研究進展,進一步提出MEMS陀螺抗高過載的設計方法和工程應用思路,為利用MEMS陀螺實現高過載姿態測量提供參考。
1 高過載環境概述
1.1 典型高過載環境
目前,在高過載姿態測量中,MEMS陀螺所面臨的典型高過載環境包括彈藥發射過程產生的高過載沖擊和彈藥侵徹過程中的高過載碰撞[11],如圖1所示。

圖1 典型高過載環境
1.1.1 發射過程高過載特性
圖2為彈藥發射過程中典型的過載特性曲線。該過程主要由3個峰值點(2個正方向,1個負方向)組成,其過載最大值可達20 000g(g=9.8 m/s2)[12]。

圖2 發射過程高過載特性曲線
由圖2可見,彈藥發射過程中,過載特性可近似分解為3個簡單的過載脈沖,其過載峰(即高過載環境產生的慣性力)[13]為
(1)
式中:Api(i=1,2,3)為過載峰值;τi(i=1,2,3)為過載截止時間;ωai=π/τi(i=1,2,3)。
1.1.2 侵徹過程高過載特性
在彈藥侵徹過程中,典型的過載特性曲線如圖3所示。當彈丸頭部剛與靶板接觸時,彈丸頭部與靶板表面相交處的橫截面較小,侵徹阻力不大,因而加速度也不大;隨著侵徹深度的增加,彈丸頭部與靶板表面相交處的橫截面不斷增大,當該橫截面的直徑與彈徑相等時,侵徹阻力接近最大值;當侵徹深度繼續增加時,侵徹阻力的增加是由彈丸外表面與靶體的接觸面積增大而使摩擦力增大,加速度接近于最大加速度;隨著侵徹深度的增加,克服侵徹阻力消耗的能量也越大,從而使彈丸的運動速度逐漸降低,當彈丸速度變化為0時,侵徹阻力也為0,加速度也隨之變為0[14-16]。

圖3 侵徹過程高過載特性曲線
1.2 高過載環境中MEMS陀螺響應類型
在高過載環境中,MEMS陀螺的響應類型按照過載作用后的時間順序可分為3類[8,17],如圖4所示。首先出現彈性波響應,其作用時間0

圖4 高過載環境中MEMS陀螺響應類型
2 高過載條件下MEMS陀螺失效模式
高過載條件下,MEMS陀螺的破壞途徑主要有兩條:一是慣性力的直接沖擊;二是高過載應力波對MEMS陀螺結構的破壞,從而導致MEMS陀螺在高過載環境中出現兩大典型問題[8,18]:
1) 陀螺在高過載作用后失去工作能力,無法繼續使用,即完全失效。
2) 高過載作用后陀螺性能嚴重退化,雖仍能保持一定的工作能力,但陀螺的各項參數和性能(如零偏、標度因數、穩定性等)發生了變化,即功能性失效。
2.1 完全失效
在高過載條件下,MEMS陀螺完全失效表現為其結構完全損壞,完全喪失工作能力,輸出的信號與角速率無關。其產生的原因來自多方面,如結構-基底鍵合層破裂引起的失效,結構層結構斷裂引起的失效等,總結起來可分為以下幾方面。
2.1.1 結構斷裂
在高過載環境中,高過載產生的應力超過MEMS陀螺材料的屈服強度極限,從而導致材料出現斷裂。此外,在交變應力的持續作用下,MEMS陀螺結構也會產生疲勞斷裂,這兩種斷裂現象均會出現在高過載作用過程中,且常出現在較關鍵的位置,如梁與錨點連接部分等。如圖5所示,在某MEMS音叉陀螺的抗沖擊實驗中,當過載載荷超過17 000g時,陀螺的彈簧梁、梳齒電極,甚至電極支撐部分出現的結構斷裂情況[19-20]。

圖5 高過載條件下MEMS音叉陀螺結構斷裂
2.1.2 貼合與黏附
貼合失效是指在高過載過程中,陀螺的結構擺動幅度過大,使梁“貼”在驅動電極上導致器件完全失效。圖6為某MEMS陀螺的微懸臂梁在沖擊下貼合在電極表面而導致失效[21]。黏附失效是指高過載導致微機構彼此間的表面吸附力大于機構的彈性恢復力,使兩個微機構黏合在一起而失效[22]。圖7為某MEMS陀螺中的微機構彼此之間黏附在一起,導致陀螺失效[23]。
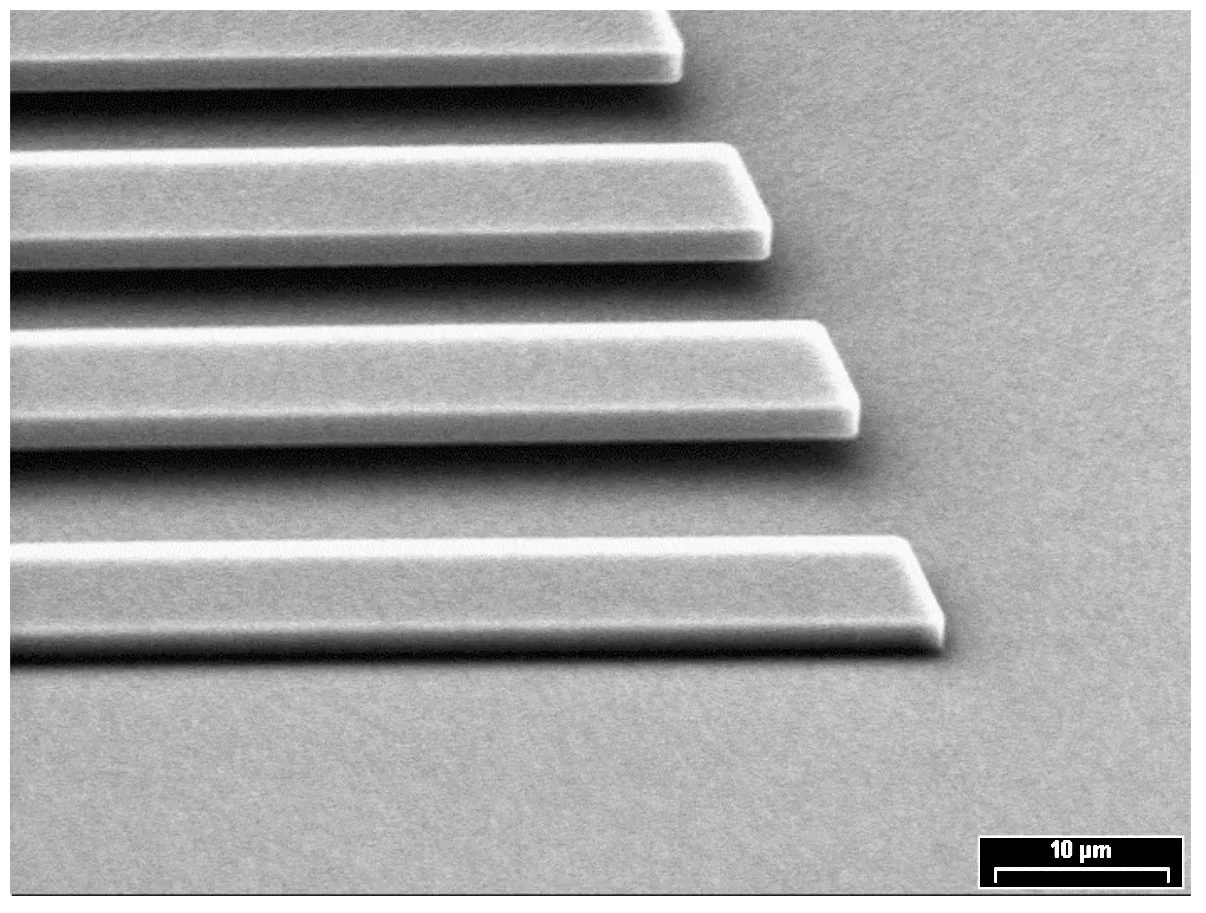
圖6 微懸臂梁貼合失效
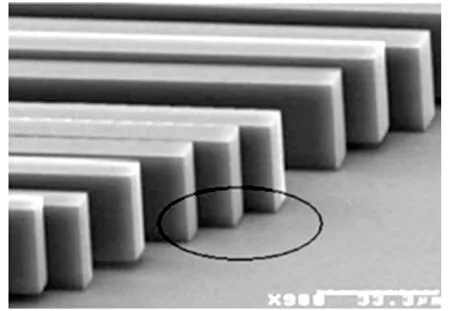
圖7 微機構黏附失效
2.1.3 微粒污染
微粒污染也是MEMS陀螺在高過載沖擊作用下常見的失效模式之一。MEMS陀螺在制造生產過程中的刻蝕、表面清理、退火、金屬沉積和封裝過程中皆可引入微粒污染,且MEMS陀螺材料的晶粒生長過程也可引入微粒污染。在高過載沖擊載荷的作用下,MEMS陀螺基底與梳齒間、梳齒與梳齒間及質量塊與梳齒間產生微粒,最終導致結構因短路而失效[24-25],如圖8所示。

圖8 微粒污染引起MEMS陀螺短路失效
2.1.4 鍵合層間脫落
大部分MEMS陀螺結構都采用分層鍵合的加工方法,但各層間材料在高溫退火等加工過程中產生的殘余應力不同,溫度系數不匹配,在高過載沖擊時會導致層間脫落而使結構失效[26]。
2.2 功能性失效
在高過載條件下,MEMS陀螺功能性失效表現為其結構未完全損壞,仍具有一定的工作能力,輸出信號雖然發生變化,但仍能反映角速度信息,導致過載前、后陀螺輸出信號差異[27]。其產生的原因主要包括機構受損及結構裂縫。
2.2.1 機構受損
在高過載條件下,MEMS陀螺的驅動機構、檢測機構,甚至部分支撐機構因出現不同程度的損傷而導致其輸出信號發生變化。如對于電容檢測的結構,高過載導致檢測電容兩極板碰撞而使極板破損,從而導致檢測信號發生變化。
2.2.2 結構裂縫
在高過載過程中,由于巨大的應力無法釋放而導致部分結構產生裂縫,影響結構質量或產生應力變形,從而使陀螺輸出信號發生變化。如高過載應力使MEMS陀螺微懸臂梁出現裂縫,導致梁出現微小變形。
3 抗高過載MEMS陀螺研究進展
與傳統陀螺相比,MEMS陀螺具有體積小,質量小,成本低,可大批量生產,可靠性高及電路可單片集成等優點,因此,MEMS陀螺已成為世界各國關于微慣性器件的研究熱點。在研制應用于高過載條件下的MEMS陀螺方面,國內外眾多公司、高校和科研院所均提出了相關方案,出現了許多不同類型的MEMS陀螺,其在高過載條件下的性能也各不相同。
3.1 國外研究進展
在抗20 000g及以上量級高過載方面,美國加州大學伯克利分校研制了一款基于碳化硅材料和線性諧振結構的MEMS陀螺[28],如圖9所示,在過載沖擊達64 000g的空氣炮試驗中,其諧振頻率無明顯變化。美國Honywell公司基于線振動原理研制的MEMS陀螺如圖10所示,該陀螺在20 000g過載條件下能夠存活,但其零偏穩定性退化近10倍[29]。法國THALES公司研制的MEMS陀螺如圖11所示[30],該陀螺經歷20 000g的過載沖擊后,其零偏穩定性退化587%,標度因數穩定性退化218%。

圖9 加州大學伯克利分校研制的MEMS陀螺

圖10 Honywell公司研制的MEMS陀螺

圖11 THALEX公司研制的MEMS陀螺
此外,英國BAE公司基于四波腹振型模態工作原理研制了一款MEMS陀螺SiVSG[31],如圖12所示,該陀螺采用電磁驅動方式和環形結構,在經歷20 000g過載沖擊后,零偏穩定性從85 (°)/h退化至110 (°)/h,其標度因數穩定性從0.69‰退化至0.91‰,性能退化近30%。韓國亞洲大學研制的基于電容驅動和檢測的MEMS陀螺[32],采用圓片級真空封裝,在過載峰值接近20 000g、持續時間1.2 ms的空氣炮作用下,其標度因數穩定性由0.027‰變為0.049‰,零偏穩定性由0.76 (°)/h變為0.83 (°)/h,如圖13所示。

圖12 BAE公司研制的MEMS陀螺

圖13 韓國亞洲大學研制的MEMS陀螺
在抗10 000g量級高過載方面,美國陸軍研究實驗室研制的MEMS陀螺在經歷10 000g過載后,零偏值由2.414 V變化至2.400 V,標度因數由12.239 mV/[(°)·s]變化至12.177 mV/[(°)·s],其結構如圖14所示[33]。美國伍斯特理工學院研制的一款音叉式MEMS陀螺能夠承受10 000g的過載沖擊,其表面形態在過載沖擊后無明顯變化,如圖15所示[34]。土耳其中東科技大學基于線振動原理研制的一款MEMS陀螺,采用一種新型的折疊梁結構,仿真顯示該陀螺在10 000g過載作用前、后,其結構無明顯損壞,其結構示意如圖16所示[35]。

圖14 美國陸軍研究實驗室研制的MEMS陀螺

圖15 伍斯特理工學院研制的MEMS音叉陀螺

圖16 土耳其中東大學研制的MEMS陀螺
美國密歇根大學無線集成微傳感與系統中心在美國國防高級研究計劃局(DARPA)“穩定型精確慣性制導彈藥先進微慣性傳感器(PRIGM-AIMS)”項目[36]的支持下,采用改進的噴燈法工藝制作了一種新型熔融石英精密殼體集成(PSI)微諧振器原型樣機(見圖17),用于實現的微半球諧振陀螺具有高抗沖擊性[37-38]。

圖17 密歇根大學研制的PSI諧振器
MEMS陀螺在高過載前、后的性能變化如表1所示。

表1 國外抗高過載MEMS陀螺研究情況匯總
3.2 國內研究進展
在抗20 000g及以上量級高過載方面,中北大學研發了一種高靈敏度的MEMS磁阻陀螺[39-41],如圖18所示,該陀螺采用電磁驅動和磁阻檢測的方式,在仿真條件下,該陀螺可承受100 000g的驅動方向過載沖擊和70 000g的檢測方向過載沖擊,但其實際抗高過載能力還有待試驗驗證。清華大學和中國科學院通過改進MEMS音叉懸掛梁的尺寸結構,提高了沖擊振動模態諧振頻率,在保證陀螺性能的前提下增強陀螺的抗沖擊性,如圖19所示。測試表明,在驅動方向上該陀螺抗沖擊性可達23 000g[20,42]。長沙理工大學和北京大學設計了一種抗沖擊保護結構,如圖20所示。實驗結果表明,該結構可使MEMS陀螺耐受20 000g以上的加速度沖擊[43]。

圖18 中北大學研制的磁阻MEMS陀螺

圖19 清華大學和中科院聯合研制的MEMS陀螺

圖20 長沙理工大學和北京大學聯合研制的MEMS陀螺
此外,國內其他機構在抗高過載MEMS陀螺的研究方面,仍主要集中在10 000g左右的量級方面。金屬錐形陀螺(見圖21)是北京理工大學提出的一種抗高過載陀螺[44-45],在10 000g以上的高過載環境中,其驅動和檢測模態的諧振頻率僅變化0.2%。同濟大學在已有環形MEMS陀螺的基礎上進行了結構優化,優化后的結構能夠有效承受達11 000g的過載峰值[46],其優化后的結構如圖22所示。上海交通大學基于壓阻形式設計了一種雙軸的抗高過載MEMS陀螺[47-48],其結構如圖23所示,經仿真測試,該結構具有較好的抗高過載沖擊能力。北京郵電大學研制了一種無驅動的“三明治”式MEMS陀螺[49-50],如圖24所示,該陀螺在角速度輸入時被動檢測電極的變化,具有一定的抗高過載沖擊能力。重慶郵電大學提出了一種諧振梁陀螺[51],如圖25所示,該陀螺能夠承受11 000g的過載沖擊。

圖21 北京理工大學研制的金屬錐形陀螺

圖22 同濟大學研制的環形MEMS陀螺

圖23 上海交通大學研制的MEMS陀螺

圖24 北京郵電大學研制的“三明治”式MEMS陀螺

圖25 重慶郵電大學研制的MEMS陀螺
在抗高過載MEMS陀螺的研制方面,國內除高校外,還有不少研究所也取得了一定的研究成果。中電26所在MEMS陀螺結構內部應力相對集中部位設計了特殊的圓弧開槽結構[9](見圖26),用以釋放應力。試驗表明,增加圓弧開槽結果的MEMS陀螺抗高沖擊能力可達到10 000g,并保持了良好的性能。上海微系統所在線振動結構的基礎上添加了質量塊的靜電力限位機構以提高結構的抗沖擊特性[52],實驗表明,該陀螺儀在x、y、z方向上可實現抗最高15 000g、最低11 000g的過載沖擊,其結構如圖27所示。中科院電子所基于電磁驅動原理提出了一款MEMS陀螺(見圖28),在仿真條件下該陀螺可承受10 000g過載[53-54]。

圖26 中電26所設計的圓弧臺階結構
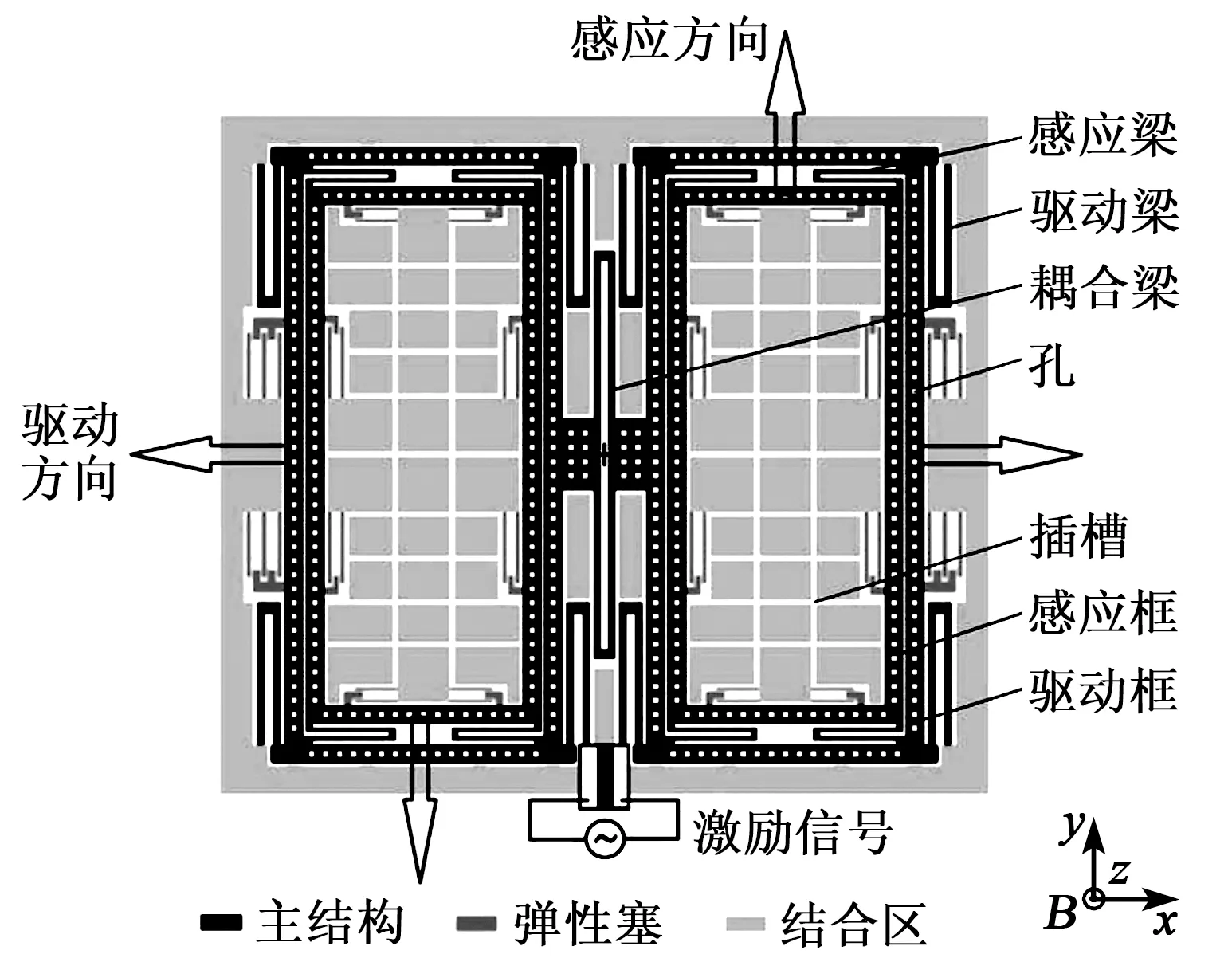
圖27 上海微系統所研制的MEMS陀螺

圖28 中科院電子所設計的MEMS陀螺
4 MEMS陀螺抗高過載設計方法與應用思路
綜合分析國內外抗高過載MEMS陀螺的研究進展可以發現,目前研制的抗高過載MEMS陀螺在高過載環境下性能會出現下降,因此,抗高過載MEMS陀螺仍需進一步研究。
4.1 抗高過載設計方法
以目前已有的各類MEMS陀螺在高過載條件下的失效模式為突破點,從元器件設計的角度出發,針對性地改進其設計方法,可有效提高MEMS陀螺的抗高過載特性[8]。
4.1.1 改變MEMS陀螺的驅動-檢測方式
目前大部分MEMS陀螺的驅動-檢測均采用梳齒電容方式,但梳齒電容在高過載條件下易發生結構斷裂和貼合黏附而導致陀螺失效,因此,可采用如電磁、磁阻效應等檢測原理的方式替代梳齒電容檢測方式[39]。
4.1.2 改變MEMS陀螺的工作模態方式
目前大部分MEMS陀螺采用基于線振動的工作方式,而實驗數據表明,采用四波腹振型模態工作方式的陀螺在高過載狀態下性能退化現象優于采用線振動工作方式的陀螺,尤其是在其全角工作模式下,通過四波腹相位信息反映輸入角度,相位信息對沖擊造成的線位移幾乎不敏感。因此,可采用四波腹振型模態的工作方式代替目前的線振動工作方式[32,44-55],提高MEMS陀螺抗高過載沖擊性能。
4.1.3 改變MEMS陀螺的結構材料
研究發現,碳化硅等新型材料的抗高過載性能優于傳統的硅材料,因此可采用碳化硅等新材料替代硅材料制造MEMS陀螺,以達到提升其抗高過載特性的目的。
4.1.4 采用“單元-組件-整機”的多級抗過載防護技術,并增加合理的吸能和釋能結構
在微慣性測量單元(MIMU)、外圍電路組件、陀螺整機外殼等層面分別采用一定的抗過載防護技術,并增加適當的結構以吸收和釋放由于高過載而產生的能量,從而提高MEMS陀螺的抗高過載能力[55-56]。
4.2 抗高過載應用思路
對于實際工程問題,技術人員更關注如何利用已有的MEMS陀螺來實現抗高過載的應用,而不是重新設計制造一款全新的MEMS陀螺。因此,從工程應用的角度出發,采用如圖29、30所示的思路可以實現現有MEMS陀螺抗高過載的工程應用。

圖29 選擇滿足要求的MEMS陀螺思路

圖30 MEMS陀螺多參量模型
由圖29可見,從現有具有一定抗高過載能力的MEMS陀螺中,利用高過載條件下的力學仿真初步挑選出滿足抗高過載要求的陀螺結構,進行沖擊試驗驗證,最終選擇出滿足要求的MEMS陀螺。基于該MEMS陀螺的誤差機理和已有試驗數據,分別利用溫度試驗、速率轉臺試驗和沖擊試驗進行靜態環境分析、動態環境測試和高過載條件分析與測試,建立其零偏溫度模型、標度因數模型和高G模型,并結合振動、隨機分析與測試建立其濾波模型,得到該MEMS陀螺的多參量模型[57-58]。在某一具體的高過載環境中,利用MEMS陀螺的多參量模型,設計對應的補償算法,對高過載條件下的數據進行補償,最終得到滿足工程要求的高質量數據(見圖30)。
5 結束語
本文從高過載條件下MEMS陀螺角度出發,介紹了典型的高過載環境和MEMS陀螺在高過載環境中的響應類型,分析了高過載條件下MEMS陀螺的失效模式,歸納了目前國內外抗高過載MEMS陀螺的研究進展,進一步凝練出MEMS陀螺抗高過載的設計方法和應用思路,為其早日應用提供參考。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
