基于攝影測量的礦井巷道圍巖變形監測儀
2020-07-14 10:24:47張靖林
科學導報·學術 2020年25期
張靖林
摘? 要:從礦井巷道圍巖檢測的角度出發,提出了一種基于攝影測量與變形檢測的自動礦井巷道圍巖變形監測儀,該儀器應用近景攝影測量方法采集巷道圍巖結構信息,結合雙目攝影原理構建巷道圍巖三維模型,通過人機交互方式標識圍巖體結構面,實現圍巖變形的精確監測,同時基于神經網絡對變形監測的數據進行分析,建立時間序列模型預測巷道圍巖變形量,有助于提前采取巷道圍巖加固支護措施。
關鍵詞:巷道圍巖檢測;攝影測量;雙目攝影原理;人機交互
一:國內外研究現狀
國外,波蘭、英國、荷蘭和日本等國都對深部開采的巷道礦壓及其控制措施
進行了大量研究。國外的研究一方面是將己有的巖石力學與礦山壓力成果應用于深部開采,但同時還結合深部開采的特殊性和本國國情對深井巷道礦壓控制進行了專門研究。
目前,我國獲取巷道圍巖變形主要是人工采用皮尺接觸式測量、全站儀、多點位移計等測量方法,皮帶接觸式測量和全站儀方法耗費時間長,人工勞動強度大,危險性高,測量精度受人為因素影響較大,且對于傾斜程度大、地質構造復雜等區域難以直接測量;多點位移計雖然實現了自動化監測分析,但巷道變形絕對參照點選定困難,僅能測量出巷道的相對變形量。由此可見,傳統礦井巷道圍巖變形監測存在諸多問題亟需解決。
二:研究的意義
基于上述關于井下巷道變形檢測方法與攝影測量技術的相關研究成果。本文提出了一種基于攝影測量與變形檢測的自動礦井巷道圍巖變形監測儀,用于實現煤礦井下巷道圍巖變形精確測量,彌補礦井巷道圍巖絕對變形量無法精確監測的空白,有助于實現礦井巷道圍巖變形動態監測,為實現巷道圍巖變形控制提供技術手段,對實現礦井安全高效生產具有重要意義。
三:技術描述與技術支持
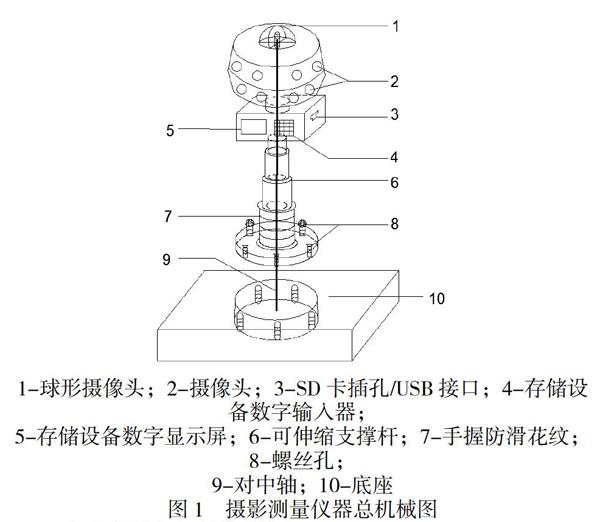
1)總機械系統結構設計
2)數據采集與存儲系統
a)頂部半圓鏡頭:上方數據采集系統,半球形設計,增大了數據采集范圍,易保證數據的準確性。
b)上下各置八個鏡頭:周圍鏡頭采用獨特的凸出傾角設計,有效減少鏡頭傷損;上半鏡頭、下半鏡頭分別裝有八個鏡頭,方便采集圖像數據,且有一定傾角,增大數據采集面積,數據采集量大,便于檢校分析成圖。
c)顯示器:顯示作用。顯示儀器的工作進度和狀態參數,方便測量者隨時檢測,確保測量的精度。
d)鍵盤:輸入作用。用于儀器的初始設置、功能切換、數據導出等。
e)USB端口:輸出作用。用于導入、導出相關數據。
f)SD卡:儲存作用。用于圖像數據的收集與存儲。
g)擴展功能:無線網絡連接與使用。在開闊、有無線信號的工作環境,儀器與電腦無線連接,可實現邊測量邊繪圖的功能。
3)支撐系統
a)防滑伸縮握把:連接、支持、穩定作用。便于儀器與底座相連接;伸縮設計可根據測量環境調整合適的高度;最下端設計為防滑握把,可保證測量工作者手持儀器時的穩定性。
4)固定系統
a)螺絲和螺孔:連接、固定作用。使儀器充分固定在底座上,保持儀器的穩定性。
b)對中軸:對中作用。用于儀器定點定位,保持原始點位置確定,方便數據收集,且本設計為一固定軸,可避免設備偏移。
c)底座:固定和支持作用。儀器架設在地面時可保持儀器穩定。
5)測量攝像頭
攝像頭基于Sirovision巖體遙測和結構分析系統,利用雙目視覺技術學習人類雙眼視覺成像原理,應用數字化影像采集設備模仿人類左右眼,從兩個不同角度拍攝同一物體。根據同一物點在圖像平面中兩個像點的坐標差,計算物點在三維空間中的坐標方位,從而實現目標物體三維表面模型的構建。
6)基于Sirovision的三維建模操作流程
應用Sirovision建立巖體表面三維模型操作流程。在數據采集過程中,以下注意點對采集數據質量有重要影響:
a)采集不同的像對時,保證相同的攝影距離;
b)各組像對拍攝區域之間,須保證足夠的重合區域,以便不同區域三維模型的拼接;
c)遵循“攝影基線長度∶拍攝距離=1∶50”和“攝影基線長度∶拍攝距離=1∶7”的原則進行拍攝,保證攝影角度正直;
d)補光燈應盡量遠離鏡頭,靠近掌子面,避免粉塵折光影響,在數字照片中形成焦點;
e)拍攝不同區域時,應隨時調整補光燈位置、朝向與光強,以保證每次拍攝范圍內光照適中且均勻;
四:創新之處
(1)結合礦井實際生產環境的特點,設計出基于攝影測量的礦井巷道圍巖變形監測儀,該裝置核心部分為攝像頭,即應用Sirovision系統建立巖體表面三維模型。
(2)利用雙目立體視覺技術的原理對數據進行采集,利用裝置內部軟件自動檢測像片的內方位元素x0、y0、f,將像片掃描坐標轉化為像片坐標系坐標。
(3)該裝置在測量過程中不會對被測量目標造成損傷,同時內存信息容量大,可進行動、靜態目標復合測量,時效性高。
參考文獻
[1]? 李浩.基于數碼影像的邊坡工程地質編錄信息系統[J].華南理工大學學報,2008,36(1):145-151.
[2]? 李滿宏.數碼攝影圖像處理技術及其在隧道地質判釋中的應用研究[J].重慶建筑,2013,12(3):1-4.
