極寒環境的輸電線路機器人巡檢關鍵技術研究
2020-07-15 08:54:20高春輝李方秘立鵬王澤禹
山東農業大學學報(自然科學版) 2020年3期
關鍵詞:檢測
高春輝,李方,秘立鵬,王澤禹
極寒環境的輸電線路機器人巡檢關鍵技術研究
高春輝1,李方2,秘立鵬1,王澤禹3
1. 國網內蒙古東部電力有限公司電力科學研究院, 內蒙古 呼和浩特 010020 2. 廣東科凱達智能機器人有限公司, 廣東 佛山 528300 3. 國網內蒙古東部電力有限公司檢修分公司, 內蒙古 通遼 028000
國內高壓輸電線路機器人巡檢存在運行環境復雜、傳感器信息量大且多樣和越障效率低等問題。本文以極寒條件下500 kV輸電線路典型障礙物為研究對象,提出一種利用圖像處理技術預處理提取目標特征,機器學習SVM分類決策算法分類,再與結構約束結合從而可以高效準確地識別高壓輸電線路障礙物,并通過準確性和有效性驗證。結果表明,該算法可以準確地識別定位防震錘等障礙物,對我國高壓輸電線路智能機器人巡檢技術的發展提供了參考和借鑒。
輸電線路; 機器人巡檢
架空高壓輸電線路是遠距離輸配電的主要方式,也是其重要的安全保證[1]。高壓輸電線路架設在野外,易發生腐蝕、磨損、斷鏈等情況,有時還會在其上附著塑料袋、樹枝等異物[2]。這對電力的輸配影響非常嚴重,極大的危害了電力的輸送。隨著機器人技術的發展,國內外許多學者及研究機構都開始對高壓巡檢機器人進行研究。在文獻[3]中,開發出一種巡線機器人來檢測傳輸線絕緣子劣化和損壞等障礙,實現了傳輸設備絕緣子串的狀態檢測和實時評估[3]。在文獻[4]中,開發了一種能夠在500 kv傳輸線上行走并越過障礙物的巡檢機器人,機器人可獨立沿直線桿塔線路巡檢[4]。
基于以上研究,本文以500 kv輸電線路典型障礙物為研究對象,提出了一種低溫條件下高壓輸電線路的典型障礙物檢測識別方法。并通過實驗驗證了算法的正確性和有效性。
1 輸電線路巡檢機器人概述
通常高壓輸電路上機器人巡檢視覺系統包括高清數字CCD或CMOS圖像傳感器、上位工控機、圖像處理軟件等。巡檢機器人前端搭載高清的數字CCD或CMOS圖像傳感器,其視場與前進方向呈一定角度可以拍攝上方導線上障礙物,采集圖像并經過灰度、濾波平滑等預處理,再對圖像特征提取和分析,上位工控機發送決策指令,輸電線路上機器人巡檢示意圖,如圖1所示。
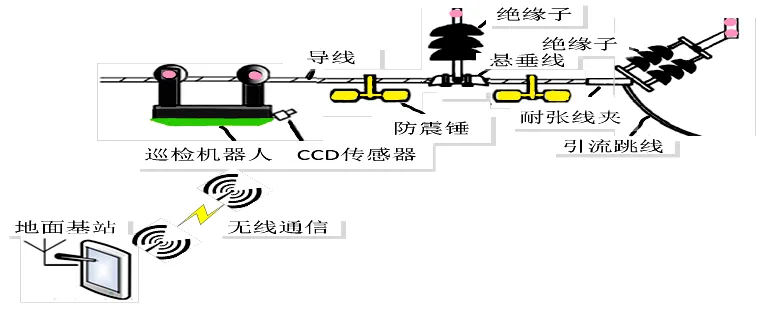
圖 1 輸電線路機器人巡檢示意圖
2 障礙物識別算法
500 kV四分裂輸電線路常見障礙物有間隔棒、防震錘、懸掛線夾等[10]。但這些障礙物的表面結構和顏色特征并不十分清晰。但其原始特性與高壓線呈一定的位置關系。識別算法主要分為障礙物特征提取與障礙物分類識別模塊。
2.1 障礙物特征提取
通常輸電線路上機器人巡檢作業受光照、惡劣環境條件的影響,其采集的圖像會有一定的噪聲等干擾,給障礙目標圖像的特征提取帶來一定的影響。為降低噪聲干擾的影響,需要對圖像進行預處理,另外由于圖像邊緣提取方法的Canny算子在圖像邊緣檢測方面具有較強抗干擾性,為在惡劣外界環境如極寒條件下得到清晰的邊緣圖,本文采用數學形態學方法與Canny算子結合,去除灰度圖像中的毛刺,只留障礙目標的大體形狀。以高壓輸電線路上的防震錘為例,對改進前后算法進行目標識別對比,如下圖2所示。從圖2中可以看出改進的Canny算子(c)圖提取的目標受噪聲對特征的影響更小。
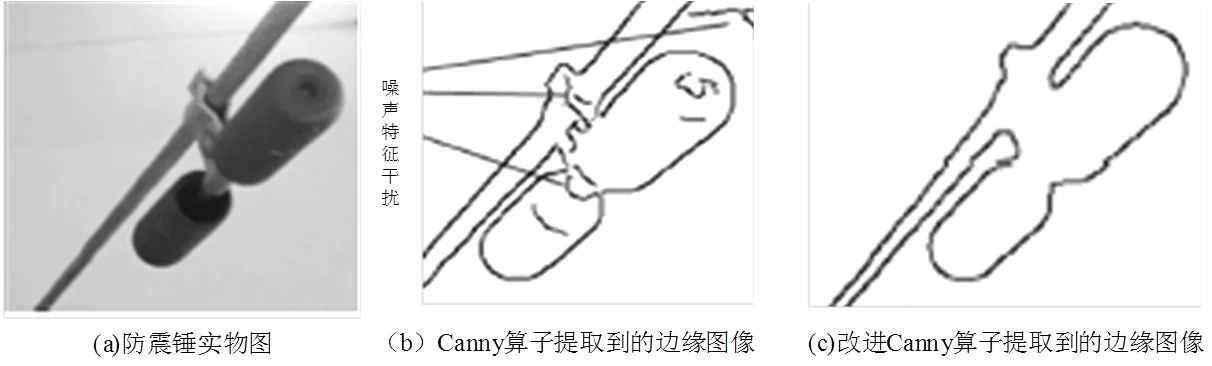
圖 2 不同方法提取的邊緣圖像
2.2 識別算法
目前人工智能技術在輸電線路檢測及其故障診斷方面具有廣泛的應用,如何對預處理的圖像進行障礙物特征的快速、準確識別至關重要。本文通過提取大量樣本圖像Haar與HOG特征,再通過SVM分類識別方法建立模板特征數據庫,將巡檢機器人在運行過程中采集到的圖像經過上述同樣的方法處理并進行快速特征查詢與匹配。
關于支持向量機SVM方法對大量采集的障礙目標樣本圖像進行訓練,提取其特征訓練多分類,為兼顧算法效率與準確率對算法具體優化措施如下:
(1)選取大量的不同環境下的障礙目標物多角度、不同距離拍攝的樣本圖像作為訓練樣本。基于常用的車輛與人臉識別的圖像Harr特征,再對提取圖像的HOG特征降維,只留區分性大的特征信息并保證訓練識別的速度與效率。
(2)SVM算法核函數的優化選取
描述決策的SVM分類函數如式(1)所示:
在式中,x和y分別是訓練集的特征向量和類標簽;(,x)是SVM的核函數;β是拉格朗日乘數的向量。支持向量機的性能可以通過懲罰參數“C”和核函數來評價。
(3)利用SVM算法將實現障礙目標的多分類問題,將其轉化為多目標函數求解,文中采用決策樹的方法,通過大量的正負樣本進行訓練。
以上方法在一般的氣象環境下可以快速的識別出障礙目標,但在極寒條件下,時常輸電線上的障礙目標可能有結冰雪遮擋以及存在高反光等嚴重影響障礙目標原有的特征信息。
可以通過結構約束來解決,結構約束利用分類器識別的區域分割,提取邊緣輪廓去除干擾因素后,然后擬合輪廓離散點的中心線。懸垂線夾由輪廓中心線和高壓線之間的橫坐標距離通過約束條件來識別。通過對障礙物類型的檢測和識別,可以得到障礙物的具體位置,幫助巡查機器人提前做出控制策略越障,以下給出該方法檢測實物圖例如圖3所示。
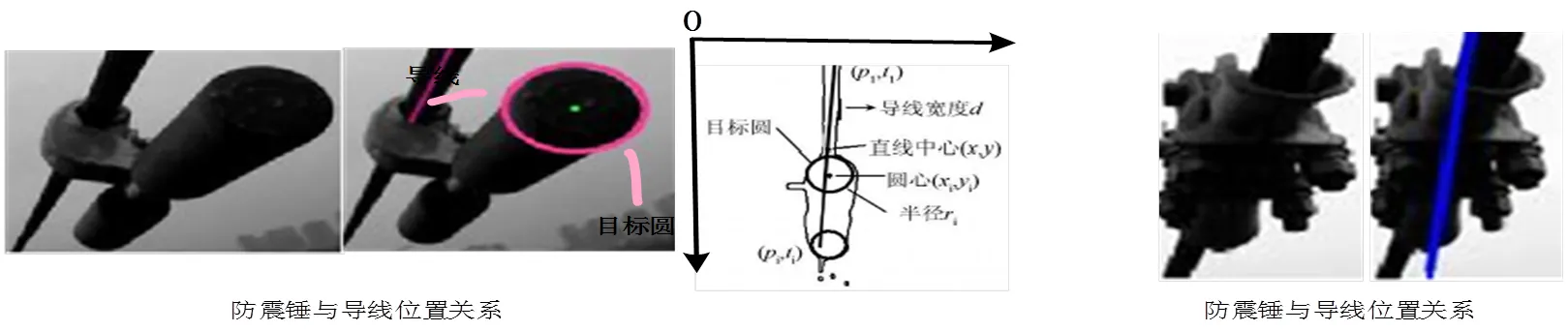
圖 3 結構約束實物目標識別
通過簡單的目標結構特點、位置識別定位與以上SVM特征分類方法結合,可以更快速、準確的識別極寒條件下的輸電線上的障礙目標,以下給出整個算法的流程圖如圖4所示。
3 結果與分析
鑒于實驗室環境與實際環境有很大的差異,對實驗結果有很大的影響,實驗驗證在室外環境進行。下面以常見的防震錘、間隔器以及懸垂線夾三種障礙目標為例對算法進行驗證,在機器人檢測到目標后,啟動障礙目標識別,對實時采集的圖像預處理得到邊緣圖像,提取圖像的特征并將其輸入到SVM中訓練分類,經過決策樹方法識別障礙物。
目前文中機器人處于優化設計階段,以下針對高壓輸電線路上防震錘、懸垂線線夾以及間隔器等幾種不同障礙物,通過采用輸電線機器人視頻圖像來驗證算法是否準確高效識別定位不同障礙物并越障,如下圖5所示。
從圖5中看出,上面三幅圖分別為經過寒冷條件下未經過優化的SVM分類算法處理有防震錘、懸垂線夾以及間隔器的特征圖像,受到特定環境背景的影響,通過對特征圖像的檢測部分仍存在一定的檢測誤差,圖中存在誤檢區域。但通過優化后SVM分類算法結合障礙目標與導線的位置及其結構約束能夠快速準確的識別出障礙目標。下面三幅圖根據實驗檢測的目標框,返回目標框中心點坐標和障礙物與攝像機之間的距離,達到智能識別越障的目標。發現本文所給的輸電線路上特殊環境下檢測目標的識別定位精確度高。
為了驗證算法的正確性和計算實時性,選擇了3000張視頻圖像,包括1000個防震錘,1000個間隔棒和1000個懸垂線線夾,利用上述方法對樣本圖像檢測結果如表1所示。
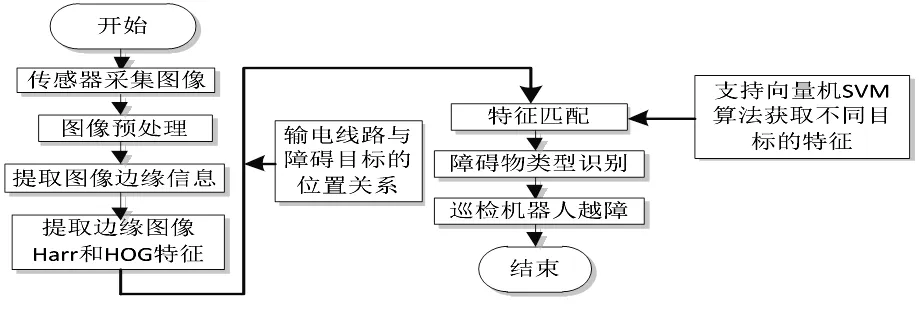
圖 4 障礙物識別算法流程圖

圖 5 不同障礙物檢測識別

表 1 障礙目標物檢測實驗數據
從表1中可以看出,SVM算法與結構約束方法可以檢測幾乎所有圖像中的目標區域,但誤檢測較嚴重。通過優化后的SVM算法處理分類訓練,結合結構約束進一步消除誤檢區域,可以更準確的對障礙目標識別定位。三個障礙物的檢測識別率均在96%以上,達到了在極寒條件下的預期效果。
4 結論
高壓輸電線路巡檢機器人使用高壓線路地線作為工作路徑完成基本巡檢任務。本文以極寒環境下500 kv輸電線路典型障礙物為研究對象,給出利用SVM分類決策算法結合不同障礙物與導線位置的結構性約束實現高壓輸電線路上不同障礙物的精準定位識別的方法,并通過實驗驗證了算法的正確性和有效性。實驗結果初步表明:對防震錘、間隔器以及懸垂線夾三種障礙物的檢測識別率均達到96%以上,取得了預期效果。鑒于目前的實驗室設備和數據規模,本文仍處于早期階段,在此基礎上,逐步改進和完善將成為下一步工作的重點。
[1] 羅朝祥,萬華艦,羅文博,等.輸電線路導線覆冰圖像處理與識別技術[J].中國電力,2014,47(9):132-136
[2] 彭向陽,錢金菊,麥曉明,等.大型無人直升機電力線路全自動巡檢技術及應用[J].南方電網技術,2016,10(2):24-31
[3] 史帥彬,汪清,俞龍飛,等.基于配網功率預估的輸配網全局潮流計算[J].電測與儀表,2018,55(18):44-49
[4] Azumaya CM, Days EL, Vinson PN,. Screening for AMPA receptor auxiliary subunit specific modulators [J]. PLoS ONE, 2017,12(3):1523-1538
Study on the Key Technology of Routing Inspection for Transmission Line by Robot under an Extremely Cold Environment
GAO Chun-hui1, LI Fang2, MI Li-peng1, WANG Ze-yu3
1.010020,2.528300,3.028000,
There are some problems such as complex operating environment, large and diverse sensor information and low obstacle surmounting efficiency.Based on the 500 kV transmission lines under the condition of cold typical obstacles as the research object, put forward a kind of pretreatment of the technology of image processing to extract target feature, machine learning classification SVM classification decision algorithm, then combined with structural constraints which can efficiently and accurately identify high voltage transmission line obstacles, and through the accuracy and validation.The results show that the algorithm can accurately identify and locate obstacles such as shockproof hammers, which provides a reference for the development of intelligent robot patrol technology of high-voltage transmission lines in China.
High voltage transmission line; robot inspection
TM755
A
1000-2324(2020)03-0525-04
10.3969/j.issn.1000-2324.2020.03.028
2019-01-05
2019-03-06
高春輝(1972-),男,碩士,高級工程師,主要研究方向為電氣工程. E-mail:zhang2016128@163.com
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
