飛行器角速度測(cè)試方法的研究
2020-07-16 04:10:08馬思宇田曉旸
航天制造技術(shù) 2020年3期
馬思宇 周 鑫 宋 歌 田曉旸 曹 萌
飛行器角速度測(cè)試方法的研究
馬思宇 周 鑫 宋 歌 田曉旸 曹 萌
(中國(guó)運(yùn)載火箭技術(shù)研究院,北京 100076)
從理論原理出發(fā),論述了基于科里奧利力原理建立數(shù)學(xué)計(jì)算模型,通過(guò)電量轉(zhuǎn)換得到相應(yīng)的角速度參數(shù)。并利用飛行器搭載MEMES傳感器的方式,實(shí)現(xiàn)將科里奧里力理論原理應(yīng)用實(shí)踐在現(xiàn)實(shí)飛行器角速度的測(cè)試工作中,獲得飛行器瞬時(shí)角速度等飛行參數(shù)。
飛行器;角速度;MEMES傳感器;科里奧利力

1 引言
在飛行器研制的過(guò)程中,飛行姿態(tài)的測(cè)試是一項(xiàng)非常重要的設(shè)計(jì)指標(biāo)。為了確定運(yùn)動(dòng)的軌跡和飛行姿態(tài),需要多次進(jìn)行姿態(tài)測(cè)試,其中瞬時(shí)角速度是姿態(tài)測(cè)試當(dāng)中的重要參數(shù)之一。本文基于科里奧利力原理,利用飛行器搭載MEMES傳感器建立了一種三維數(shù)學(xué)模型并將其應(yīng)用于跟蹤飛行器瞬時(shí)角速度等飛行參數(shù)研究。相較于傳統(tǒng)光學(xué)測(cè)試方法,該種電測(cè)方法能更加準(zhǔn)確、全面反饋飛行器相關(guān)飛行參數(shù),具有較大的應(yīng)用前景。
2 角速度測(cè)試系統(tǒng)的原理
角速度測(cè)試系統(tǒng)的核心是MEMES傳感器。傳感器輸出的測(cè)量電壓經(jīng)過(guò)放大、采集、記錄,變成可以被后續(xù)處理的角速度數(shù)據(jù)。其中MEMES陀螺儀傳感器的原理如圖1所示。
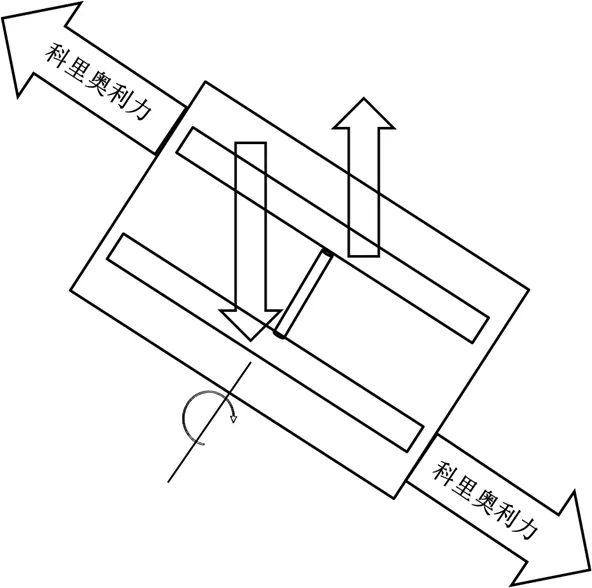
圖1 MEMES傳感器工作原理模擬圖
圖中,當(dāng)振子以速度運(yùn)動(dòng)時(shí),如果傳感器按圖示方向旋轉(zhuǎn),振子將在正交方向收到科里奧利力的作用。由于傳感器的運(yùn)動(dòng)不是慣性運(yùn)動(dòng),當(dāng)以傳感器為參考系描述動(dòng)力過(guò)程時(shí),必須引入一個(gè)假想的力,這個(gè)力就是科里奧利力。該力等效于慣性參考系中,振子慣性運(yùn)動(dòng)偏離徑向的傾向。引入科里奧利力后,可以像處理慣性參考系中的運(yùn)動(dòng)一樣簡(jiǎn)單地處理旋轉(zhuǎn)參考系中的運(yùn)動(dòng)過(guò)程。
取得科里奧利力值后,根據(jù)科里奧利力的計(jì)算公式計(jì)算即可得到角速度值。
2.1 科里奧利力的數(shù)學(xué)計(jì)算模型
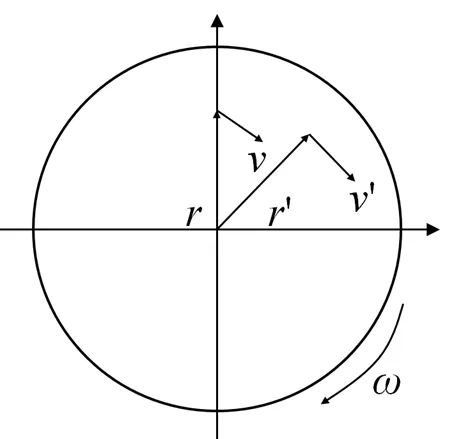
圖2 慣性系勻速直線運(yùn)動(dòng)在轉(zhuǎn)動(dòng)參考系中的情形
科里奧利力是轉(zhuǎn)動(dòng)參考系中定義的勻速直線運(yùn)動(dòng)與慣性系中的勻速直線運(yùn)動(dòng)不同所致:轉(zhuǎn)動(dòng)參考系中的勻速直線運(yùn)動(dòng)是指物體相對(duì)于旋轉(zhuǎn)面的相對(duì)速度不變的運(yùn)動(dòng);慣性系中的勻速直線運(yùn)動(dòng)是指相對(duì)于靜止質(zhì)心速度不變的運(yùn)動(dòng)。因此,當(dāng)物體在轉(zhuǎn)動(dòng)參考系中做勻速直線運(yùn)動(dòng)時(shí),在慣性系中的軌跡是一條曲線,反之亦然。設(shè)有一個(gè)物體在慣性系中做勻速直線運(yùn)動(dòng),它在轉(zhuǎn)動(dòng)參考系中的情形如圖2所示。
物體在0時(shí)刻位于轉(zhuǎn)動(dòng)參考系中處,時(shí)刻位于轉(zhuǎn)動(dòng)參考系中'處,0時(shí)刻瞬時(shí)速度為,時(shí)刻瞬時(shí)速度為',轉(zhuǎn)動(dòng)參考系的轉(zhuǎn)速為。假設(shè)0時(shí)刻轉(zhuǎn)動(dòng)參考系與慣性系坐標(biāo)軸重合,則該物體在慣性系中運(yùn)動(dòng)的情形如圖3所示。
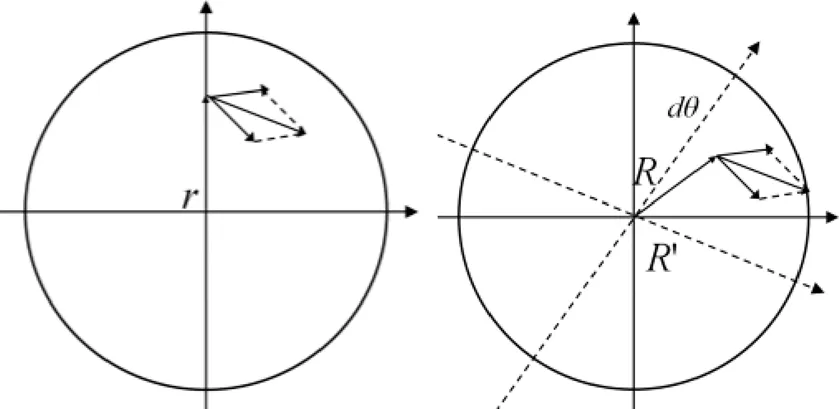
圖3 慣性系中勻速直線運(yùn)動(dòng)的情形
物體在慣性系中的運(yùn)動(dòng)速度為,保持不變。為轉(zhuǎn)動(dòng)參考系在慣性系中0時(shí)刻的運(yùn)動(dòng)速度,'為轉(zhuǎn)動(dòng)參考系在慣性系中時(shí)刻的運(yùn)動(dòng)速度。、'為時(shí)刻轉(zhuǎn)動(dòng)參考系、'在慣性系中的對(duì)應(yīng)位置。(以下各等式中表示外積)
顯然=×,=+。于是有:
=×+(1)
類似的,有'=×',=''+'。于是有:
=×'+'' (2)
由于物體在0時(shí)刻位于處,在時(shí)刻運(yùn)動(dòng)到了'處,考慮到物體在慣性系中做勻速直線運(yùn)動(dòng),因此:
'=+×(3)
綜合式(1)、式(3)有:
'=+××+×(4)
然而,由于時(shí)刻轉(zhuǎn)動(dòng)參考系本身也轉(zhuǎn)過(guò)了一個(gè)角度,''并不是'。為了得到',需要將''對(duì)應(yīng)轉(zhuǎn)動(dòng)一個(gè)角度。考慮到是一個(gè)極短的時(shí)間,極小,×'≈×;進(jìn)而忽略高階誤差,有如下關(guān)系:
''='+×(5)
將式(5)與式(1)、式(2)、式(4)相減,可得:
'-=-×(×) ×-2×××(6)
該等式左側(cè)為速度差。考慮到是一個(gè)極短的時(shí)間,可以認(rèn)為'-就是速度微分。因此,式(6)實(shí)際上就是轉(zhuǎn)動(dòng)參考系中的慣性速度微分公式。
顯然,轉(zhuǎn)動(dòng)參考系中的慣性加速度公式是:
=/=-×(×)-2××(7)
其中:第一部分-×(×)=2與速度無(wú)關(guān),為轉(zhuǎn)動(dòng)參考系中的離心加速度;第二部分與速度一階相關(guān),就是科里奧利加速度。所以,科里奧利加速度的計(jì)算公式=-2×,為科里奧利加速度;為徑向運(yùn)動(dòng)速度;為旋轉(zhuǎn)角速度。
科里奧利力的計(jì)算公式=-2×,為科里奧利力;為質(zhì)量。
2.2 角速度測(cè)試系統(tǒng)的工作過(guò)程
MEMES傳感器的工作過(guò)程為:對(duì)固定框架施加交變電壓,讓振子做振蕩式來(lái)回運(yùn)動(dòng)。當(dāng)傳感器整體旋轉(zhuǎn)時(shí),會(huì)產(chǎn)生科里奧利加速度。科里奧利力將使得振子在正交方向上發(fā)生彈性運(yùn)動(dòng),改變測(cè)量電路在正交方向上的電容值。通過(guò)測(cè)量該電容值對(duì)應(yīng)的電壓變化可以實(shí)現(xiàn)對(duì)科里奧利力測(cè)量。
由于科里奧利力與振子的振蕩式運(yùn)動(dòng)方向正交,根據(jù)科里奧利力的計(jì)算公式=-2×,可得角速度值=-/(2),式中:為科里奧利加速度值;為徑向運(yùn)動(dòng)速度值;為旋轉(zhuǎn)角速度。
其中,正比于驅(qū)動(dòng)振子運(yùn)動(dòng)的交變電壓值。因此只需將測(cè)量得到的電壓與交變電壓進(jìn)行比較,即可取得角速度值。
MEMES傳感器輸出的電壓非常微弱。經(jīng)過(guò)角速度測(cè)試系統(tǒng)的放大、采集、記錄,變成可以被后續(xù)處理的角速度數(shù)據(jù)。
3 實(shí)踐應(yīng)用與試驗(yàn)
3.1 飛行器姿態(tài)記錄器
根據(jù)上述角速度測(cè)試系統(tǒng)的數(shù)學(xué)計(jì)算模型與工作過(guò)程,結(jié)合以往飛行器試驗(yàn)電測(cè)的理論與實(shí)踐基礎(chǔ),研發(fā)應(yīng)用飛行器姿態(tài)記錄器,姿態(tài)記錄器用于地面試驗(yàn)飛行器角速度及加速度的記錄。姿態(tài)記錄器采用MEMES加速度計(jì)和MEMES陀螺作為傳感器,利用存儲(chǔ)測(cè)試技術(shù)將傳感器所測(cè)數(shù)據(jù)存于電路模塊的FLASH中。姿態(tài)記錄器由電路模塊、MEMES加速度計(jì)和MEMES陀螺組成,結(jié)構(gòu)見(jiàn)圖4。
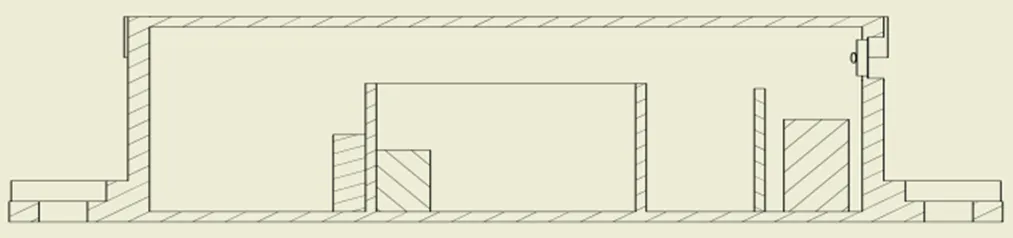
圖4 姿態(tài)記錄器結(jié)構(gòu)簡(jiǎn)圖
記錄器內(nèi)置,,三軸傳感器,由高性能加速度計(jì)和偏航與速率陀螺組成,陀螺儀和加速度傳感器安裝于內(nèi)部垂直面上,安裝面加工垂直度為七級(jí)。
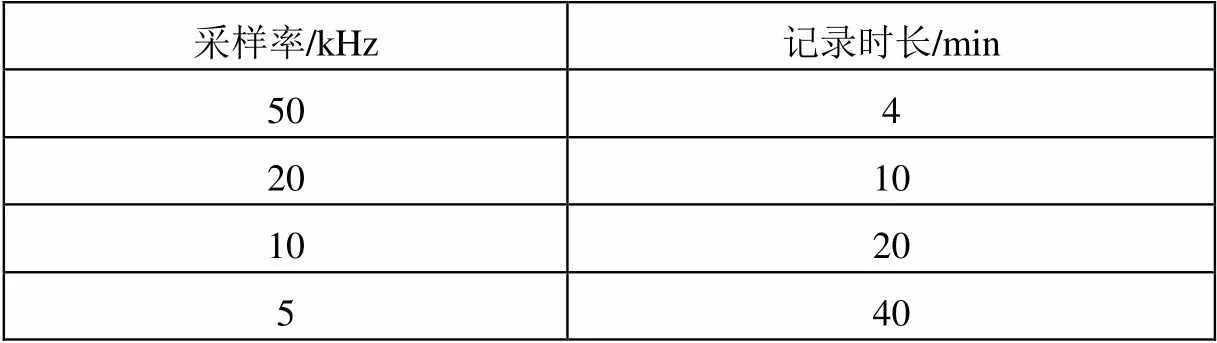
表1 記錄器的采樣率
裝置可以連續(xù)記錄飛行器的運(yùn)動(dòng)姿態(tài),包括:角速度及加速度。可以裝定延時(shí)時(shí)間,實(shí)現(xiàn)在上電后指定時(shí)間自動(dòng)開(kāi)始記錄。并可以設(shè)定采樣率,滿足不同的采樣要求。采樣率如表1所示。
3.2 試驗(yàn)應(yīng)用與數(shù)據(jù)分析
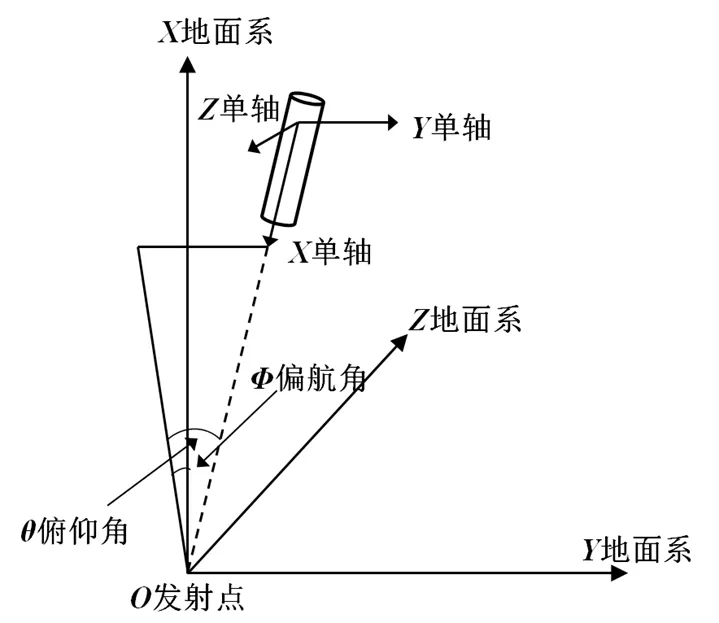
圖5 記錄器安裝坐標(biāo)系
飛行器姿態(tài)記錄器在地面飛行試驗(yàn)的應(yīng)用過(guò)程中,需通過(guò)法蘭盤(pán)將記錄器安裝于伴飛對(duì)象上,坐標(biāo)系安裝如圖5所示。
通過(guò)飛行過(guò)程中姿態(tài)記錄器的加速度計(jì)與陀螺儀傳感器紀(jì)錄姿態(tài)參數(shù),并存于電路模塊的FLASH中,試驗(yàn)結(jié)束后將數(shù)據(jù)導(dǎo)入MATLAB軟件當(dāng)中,根據(jù)上文中的飛行器角速度測(cè)試系統(tǒng)工作原理與科里奧利力數(shù)學(xué)計(jì)算模型,進(jìn)行數(shù)據(jù)分析,可得到如表2所示試驗(yàn)數(shù)據(jù)與圖6和圖7所示的試驗(yàn)數(shù)據(jù)曲線。

表2 試驗(yàn)數(shù)據(jù)結(jié)果
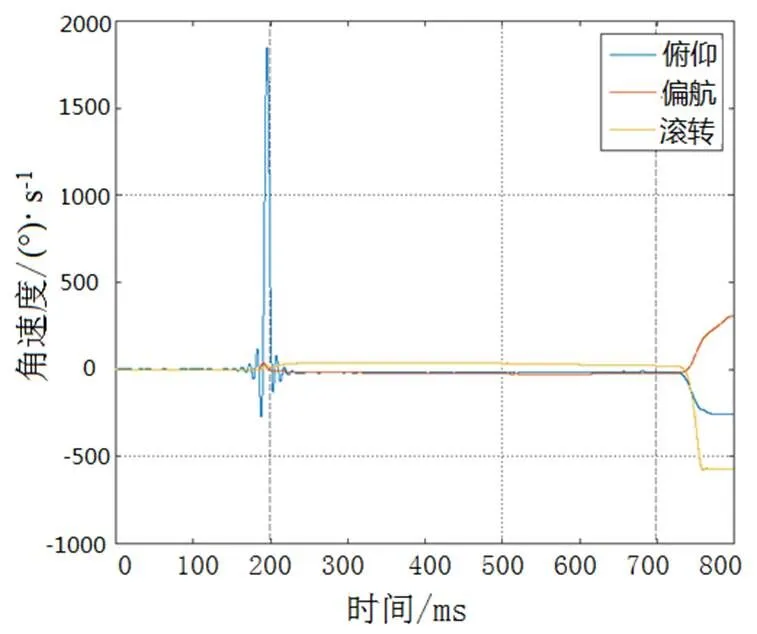
圖6 三軸角速度數(shù)據(jù)曲線
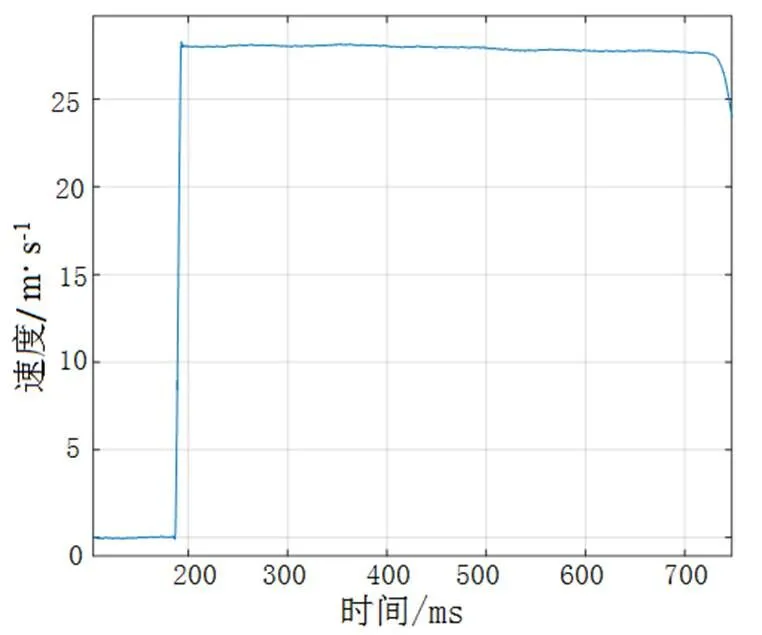
圖7 飛行期間最大速度曲線
4 結(jié)束語(yǔ)
使用角速度測(cè)試系統(tǒng),通過(guò)將角速度測(cè)試系統(tǒng)放置在飛行器內(nèi),隨飛行器一起運(yùn)動(dòng),可以利用MEMES傳感器,基于科里奧利力原理,建立數(shù)學(xué)模型并對(duì)加速度進(jìn)行數(shù)據(jù)處理,準(zhǔn)確測(cè)量飛行器的瞬時(shí)角速度。
1 才睿,郭昱,薛云朝,等.飛行器角速度測(cè)試的方法研究[J].計(jì)算機(jī)測(cè)量與控制,2008(12):1907~1908
2 簡(jiǎn)粵.無(wú)阻尼情況下科里奧利力對(duì)拋體運(yùn)動(dòng)的影響[J].蘭州工業(yè)學(xué)院學(xué)報(bào),2014(3):86~90
3 江文寧. 基于鎖相環(huán)原理的MEMS硅陀螺閉環(huán)驅(qū)動(dòng)電路設(shè)計(jì)[D].哈爾濱:哈爾濱工業(yè)大學(xué),2015
4 陳世民.理論力學(xué)簡(jiǎn)明教程[M].北京:高等教育出版社,2001
5 王平瑞. 關(guān)于科里奧利力的教學(xué)[J].內(nèi)蒙古師范大學(xué)學(xué)報(bào),2011(5):130~132
6 趙媛媛.慣性力的研究[J].管理學(xué)家,2014(4):453~454
7 吳昊,馬凱,解敏. 論經(jīng)典力學(xué)中的參考系[J]. 力學(xué)與實(shí)踐,2018(3):319~322
8 路文山.航天器自旋人工重力場(chǎng)中航天員行走動(dòng)力學(xué)與控制研究[D].南京:南京航空航天大學(xué),2016
9 王敬華.基于正交算法科里奧利質(zhì)量流量計(jì)的設(shè)計(jì)[D].上海:上海交通大學(xué),2013
10 王峰. 變姿飛行器地面測(cè)試平臺(tái)的研究與設(shè)計(jì)[D]. 上海:上海大學(xué),2008
11 林鋼,于曉凌. 關(guān)于科里奧利力與科里奧利加速度[C]. 2013年全國(guó)高等學(xué)校物理基礎(chǔ)課程教育研討會(huì). 北京,2013
Research on Test Method of Angular Velocity of Aircraft
Ma Siyu Zhou Xin Song Ge Tian Xiaoyang Cao Meng
(China Academy of Lauch Vehicle Technology, Beijing 100076)
Based on the theoretical principles, this article discusses how to establish a mathematical calculation model based on the Coriolis force principle, and obtain the corresponding angular velocity parameters through the conversion of electricity. Using the method of the aircraft carrying the MEMES sensor, the principle of Coriolis force theory is applied in the test of the actual aircraft angular velocity, and the flight parameters such as the instantaneous angular velocity of the aircraft are obtained.
aircraft;angular velocity;MEMES sensor;coriolis force
馬思宇(1993),工程師,自動(dòng)化專業(yè);研究方向:導(dǎo)彈武器系統(tǒng)。
2020-04-21
