三維激光雷達(dá)在汽車輔助駕駛中的應(yīng)用分析
2020-07-22 09:57:27江勇捷藍(lán)麗金
數(shù)字技術(shù)與應(yīng)用 2020年6期
江勇捷 藍(lán)麗金
摘要:在現(xiàn)如今車輛駕駛系統(tǒng)蓬勃發(fā)展的背景下,無(wú)人車輛駕駛是其發(fā)展的重要趨勢(shì),而三維激光雷達(dá)正是汽車實(shí)現(xiàn)無(wú)人駕駛的關(guān)鍵所在。用于精準(zhǔn)、快速獲取三維空間信息的激光雷達(dá)傳感器有著目標(biāo)識(shí)別、分類及三維成像等方面的技術(shù)優(yōu)勢(shì),其應(yīng)用范圍和發(fā)展前景十分廣闊。隨著現(xiàn)代無(wú)人駕駛技術(shù)越來(lái)越趨向于多種傳感器相互融合探測(cè)發(fā)展,三維成像的發(fā)展也更趨向于主、被動(dòng)成像相結(jié)合,以獲取豐富的目標(biāo)信息。
關(guān)鍵詞:智能汽車;三維激光雷達(dá);輔助駕駛
中圖分類號(hào):TP391 ?文獻(xiàn)標(biāo)識(shí)碼:A ? ? 文章編號(hào):1007-9416(2020)06-0000-00
0引言
隨著社會(huì)日漸信息化和飛速發(fā)展的智能化,現(xiàn)代家庭幾乎每家每戶都擁有車輛,為了便利和舒適很多人會(huì)選擇汽車作為交通工具,但它的使用也會(huì)帶來(lái)一些交通安全問(wèn)題。因此,當(dāng)下亟待解決的核心問(wèn)題是如何提高車輛的安全駕駛性能和降低交通事故發(fā)生率,而安全輔助駕駛系統(tǒng)正是順應(yīng)了該應(yīng)用潮流,在保證安全駕駛的目標(biāo)上,如何使車輛能夠精準(zhǔn)識(shí)別道路與車輛或障礙是其領(lǐng)域的一個(gè)重要的技術(shù)核心。利用車輛輔助系統(tǒng)來(lái)提高道路交通的安全程度,己然成為未來(lái)交通運(yùn)輸?shù)陌l(fā)展方向。通過(guò)先進(jìn)的技術(shù)手段輔助駕駛?cè)蝿?wù),為汽車提供更加完善的輔助駕駛功能,逐步去實(shí)現(xiàn)汽車的智能化,并最終走向完全無(wú)人駕駛的智能汽車的輔助系統(tǒng),必將是解決交通安全問(wèn)題的有效途徑[1]。三維激光雷達(dá)的應(yīng)用是智能車輛安全輔助駕駛系統(tǒng)的重要研究?jī)?nèi)容,對(duì)于減少車輛交通事故,提高車輛的道路行駛安
全具有重要意義。
1系統(tǒng)總架構(gòu)
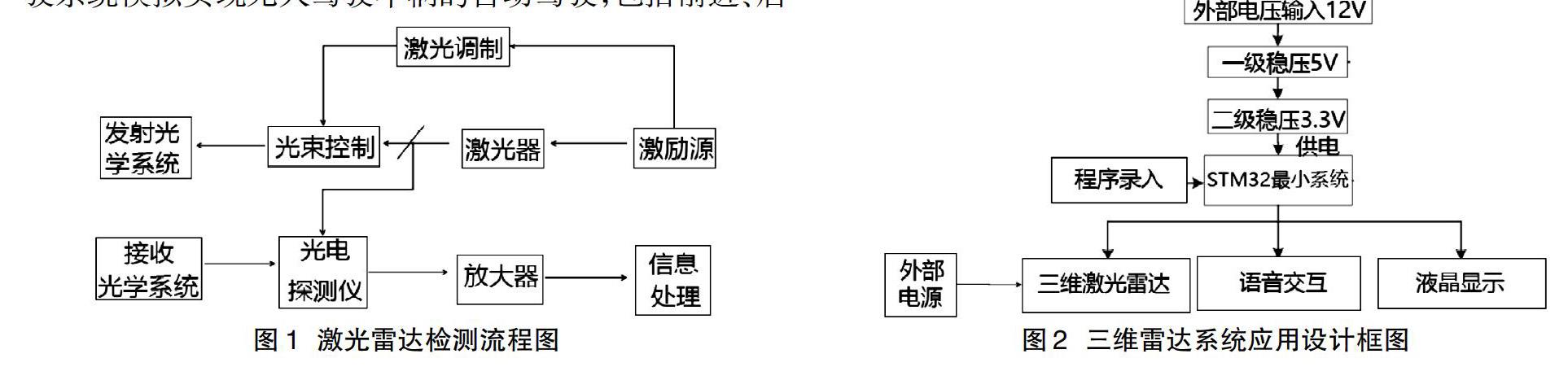
在該項(xiàng)目研究中,基于三維激光雷達(dá)建模的無(wú)人車駕駛系統(tǒng)模擬實(shí)現(xiàn)無(wú)人駕駛車輛的自動(dòng)駕駛,包括前進(jìn)、后退、轉(zhuǎn)彎、減速、制動(dòng)等功能,采用激光測(cè)距方法、三維激光雷達(dá)掃描建模方法等建立無(wú)人車輛行駛周圍的環(huán)境,通過(guò)攝像頭識(shí)別周圍環(huán)境的物體進(jìn)行進(jìn)一步的識(shí)別和分析,綜合各個(gè)傳感器信息,并把該信息采集回來(lái)傳遞給主控中心,結(jié)合GPS定位系統(tǒng)實(shí)現(xiàn)無(wú)人駕駛車輛的實(shí)時(shí)地位和導(dǎo)航,增加語(yǔ)音播報(bào)進(jìn)行交互設(shè)計(jì),實(shí)現(xiàn)該系統(tǒng)的整體功能。在國(guó)內(nèi)外,智能駕駛與無(wú)人駕駛領(lǐng)域中,已經(jīng)提出多種實(shí)施手段和算法,但以三維激光雷達(dá)為基礎(chǔ)的傳感器是其關(guān)鍵。激光雷達(dá)檢測(cè)流程圖如圖1所示。
激光三維成像是在精準(zhǔn)檢測(cè)每個(gè)二維每個(gè)像素點(diǎn)距離的基礎(chǔ)上,同步測(cè)量每個(gè)測(cè)距點(diǎn)的方向和位置。單點(diǎn)的掃描和面陣器件成像是獲取方位信息的兩種有效方式 [2]。
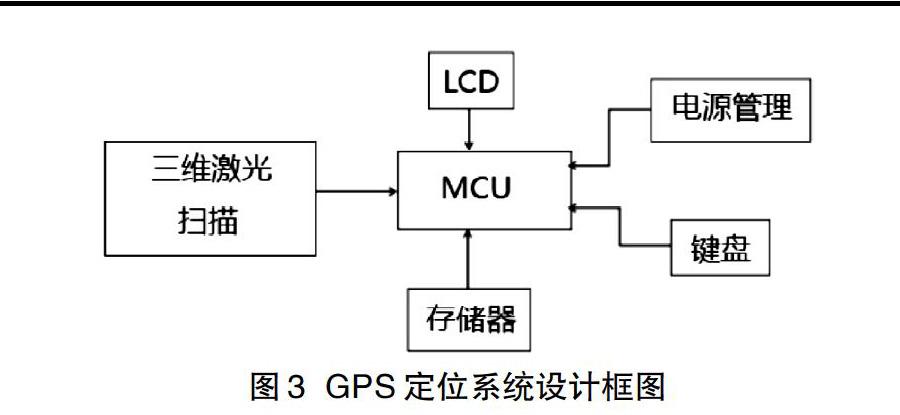
在掃描式三維成像激光雷達(dá)系統(tǒng)由單點(diǎn)激光測(cè)距系統(tǒng)和光束掃描裝置構(gòu)成,是目前發(fā)展較為成熟的三維成像激光雷達(dá)技術(shù),其廣泛應(yīng)用在地形測(cè)繪、汽車導(dǎo)航及防撞、汽車的輔助駕駛等領(lǐng)域。直接脈沖方式檢測(cè)的應(yīng)用可以實(shí)現(xiàn)掃描式三維激光雷達(dá)在每個(gè)點(diǎn)的迅速測(cè)距。掃描裝置用來(lái)控制雷達(dá)光軸指向不同方向,并依次完成目標(biāo)上各點(diǎn)距離的測(cè)量,同時(shí)記錄下光束指向的方位-俯仰角,這樣獲取的目標(biāo)距離、角度和角度圖像就是三維圖像。值得注意的是,發(fā)射光軸與接收光軸作為激光雷達(dá)系統(tǒng)的兩個(gè)相互平行的光軸,要求激光雷達(dá)工作時(shí)掃描裝置應(yīng)同步掃描這兩平行光軸,因而一般情況下掃描雷達(dá)設(shè)計(jì)為發(fā)射-接收同軸,且掃描鏡的光學(xué)有效孔徑不能過(guò)小[3],如圖2所示為三維雷達(dá)系統(tǒng)應(yīng)用設(shè)計(jì)框圖。
2 三維激光掃描的應(yīng)用分析
在雷達(dá)型號(hào)的選擇上,有著更多的選擇性。星載成像激光雷達(dá)、機(jī)載成像激光雷達(dá)與車載成像激光雷達(dá)都求著其實(shí)用性與可靠性[4]。
星載成像激光雷達(dá)主要用于空間交會(huì)對(duì)接、飛行器的導(dǎo)航著陸以及星載對(duì)地三維成像等。星載激光雷達(dá)需要探測(cè)的距離較遠(yuǎn)(400km左右),對(duì)系統(tǒng)的發(fā)射功率和接收口徑有高的要求。同時(shí),星載激光雷達(dá)有著平臺(tái)載荷的限制,對(duì)系統(tǒng)的體積、功耗、質(zhì)量又有著嚴(yán)格的約束,因此有更高靈敏度的光子計(jì)數(shù)激光雷達(dá)便逐漸成為其技術(shù)發(fā)展方向。在不斷對(duì)三維成像效果和要求提高下,應(yīng)用在星載的激光雷達(dá)系統(tǒng)逐漸從單點(diǎn)探測(cè)向著線陣推掃或者面陣式成像發(fā)展,也不斷提高系統(tǒng)的橫向分辨率和測(cè)距精度,系統(tǒng)的發(fā)展越來(lái)越成熟。雖然其性能可靠,但其價(jià)格昂貴,不適用于本次設(shè)計(jì)使用。三維激光掃描的簡(jiǎn)要應(yīng)用框圖如圖3所示。
機(jī)載成像激光雷達(dá)主要的應(yīng)用研究領(lǐng)域有地形測(cè)繪、電力巡線、水下探測(cè)、遮蔽目標(biāo)探測(cè)等。機(jī)載掃描成像激光雷達(dá)系統(tǒng)因其特性,是目前應(yīng)用較為廣泛的系統(tǒng),成熟應(yīng)用在各個(gè)領(lǐng)域,特別是在城市地形測(cè)繪、水下探測(cè)、電力巡線等領(lǐng)域有廣泛的應(yīng)用。但其較遠(yuǎn)的探測(cè)距離也著實(shí)增加了其制造成本,在無(wú)人車上的使用也是無(wú)法完全發(fā)揮機(jī)載成像激光雷達(dá)的能力,故在此不推薦使用[5]。
車載激光雷達(dá)成像系統(tǒng)應(yīng)用在不同的場(chǎng)合下,一般采取直接探測(cè)的方式,具有著探測(cè)距離遠(yuǎn)、成像視場(chǎng)寬的優(yōu)點(diǎn),且在價(jià)格上相對(duì)另外兩中類型雷達(dá)更為合適與汽車安裝使用。星載、機(jī)載、車載等領(lǐng)域都有著不可替代的位置,但其性能與價(jià)格在實(shí)際應(yīng)用上有著顯著差別。由于激光雷達(dá)系統(tǒng)成像中單點(diǎn)掃描成像速度較為慢,激光雷達(dá)成像系統(tǒng)將面陣掃描與線陣推掃式成像逐步代替單點(diǎn)掃描成像,掃描成像激光雷達(dá)系統(tǒng)探測(cè)器中的線性探測(cè)器不斷被子計(jì)數(shù)探測(cè)器取代,后者具有更高的靈敏度,從而達(dá)到小體積、輕重量、低功耗的特點(diǎn)。
3結(jié)語(yǔ)
近年來(lái)汽車工業(yè)的發(fā)展日新月異,無(wú)人駕駛系統(tǒng)在汽車安全駕駛的應(yīng)用中也是備受關(guān)注,先進(jìn)的雷達(dá)和穩(wěn)定的系統(tǒng)便成為各大汽車生產(chǎn)公司的關(guān)注點(diǎn)。在總結(jié)了星載成像激光雷達(dá)、機(jī)載成像激光雷達(dá)與車載成像激光雷達(dá)的性能,其在汽車應(yīng)用上的可靠性、可行性與優(yōu)劣的對(duì)比分析后可以見(jiàn)得,車載成像激光雷達(dá)探測(cè)范圍符合實(shí)際駕駛中的客觀環(huán)境,探測(cè)視覺(jué)角度可保障汽車安全性,且體積小,價(jià)格合理,是作為汽車輔助駕駛系統(tǒng)的最佳選擇。
參考文獻(xiàn)
[1]劉博,于洋,姜朔.激光雷達(dá)探測(cè)及三維成像研究進(jìn)展[J].光電工程,2019,46(7):21-33.
[2]李晨曦,張軍,靳欣宇,等.激光雷達(dá)SLAM技術(shù)及其在無(wú)人車中的應(yīng)用研究進(jìn)展[J].北京聯(lián)合大學(xué)學(xué)報(bào),2017,31(4):61-69.
[3]王小珂,周勇,王鈐.基于激光雷達(dá)距離圖像信息的三維重構(gòu)技術(shù)[J].兵工自動(dòng)化,2013,32(3):85-86+89.
[4]麥新晨,楊明,王春香,等.一種基于多傳感器融合的車輛檢測(cè)與跟蹤方法[J].上海交通大學(xué)學(xué)報(bào),2011,45(7):1012-1016.
[5]項(xiàng)志宇.快速三維掃描激光雷達(dá)的設(shè)計(jì)及其系統(tǒng)標(biāo)定[J].浙江大學(xué)學(xué)報(bào)(工學(xué)版),2006(12):2130-2133.
收稿日期:2020-04-25
*項(xiàng)目基金:全國(guó)大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目,編號(hào):201813470001;福建省教育廳科技,編號(hào):JAT170845。
作者簡(jiǎn)介:江勇捷(1997—),男,福建漳州人。[A1]
通訊作者:藍(lán)麗金(1987—),女,畬族,福建龍巖人,碩士,講師,研究方向:電氣自動(dòng)化。
