自動苗木栽植機器人的設計
2020-07-26 14:19:51袁野馬勝凱孫茂源石宇田馮浩剛李樹森
科技創新與應用 2020年22期
袁野 馬勝凱 孫茂源 石宇田 馮浩剛 李樹森

摘? 要:隨著農業的不斷發展,產生了各種半自動移栽機,便捷高效的自動化栽植機構市面上仍較少。文章設計了一種包括取苗定位機構、苗木存儲機構以及栽植機構的自動苗木種植機器人,機械裝置根據設定程序進行取苗、種植等一系列流程,大大減少了種植勞動強度,使得整個苗木勞動效率得到上升。
關鍵詞:苗木栽植機器人;農業機器人;軌跡
中圖分類號:TP242 文獻標志碼:A 文章編號:2095-2945(2020)22-0038-03
Abstract: With the continuous development of agriculture, a variety of semi-automatic transplanters have emerged, and there are still few convenient and efficient automatic planting institutions on the market. In this paper, a kind of automatic seedling planting robot is designed, which includes seedling positioning mechanism, seedling storage mechanism and planting mechanism. The mechanical device carries out a series of processes such as seedling extraction and planting according to the set program, which greatly reduces the labor intensity of planting and increases the labor efficiency of the whole seedling.
Keywords: seedling planting robot; agricultural robot; trajectory
一個國家的農業現代化程度高低的標志是農業機械化水平,從21世紀以來,自動機械在農業領域的發展十分迅猛,農業類自動機器人的研發持續進步。特別在近年,為實施農業機械化,政府發布許多政策措施以提高農業領域現代化水平,在農業領域不斷縮小與發達國家的差距。其中,今天的栽植類機器人,是一個有著外界傳感、精準可控能力的綜合性控制機器人。
但當前市面上的移栽機大多均為半自動移栽機,有很多彎腰、伸手的動作,在密集作業時,可能會有一天8小時的勞動時間,勞動強度非常大;隨著農村經濟的高速發展,作業人員數量逐漸減少,種植成本大大增加;并且,人工遞苗和取苗的速度制約了移栽作業的效率。為了提高苗木移栽效率,用一款便捷高效的自動化栽植機構來代替繁重低效的人工栽植非常有必要。
1 自動苗木栽植機器人總體方案的設計
設計一種自動栽植機構,包括取苗定位機構、苗木存儲機構以及栽植機構。設計其結構,并對其機構特點及動作要求進行深入分析,結合幼苗農藝夾持特性,對取苗末端執行器參數進行優化,分析其夾苗軌跡。
1.1 機械方案的設計
栽植設備的作用一般是從栽植設備中苗木存儲機構中取得待栽植的苗木,然后通過軌跡規劃將苗木栽植到土地中去。在此過程之中,種植處的種植深度也是栽植的一個重要條件,此設備需要精確的獲得數據,以確保栽植目的的完成。
本文設計的自動苗木栽植機器人主要包括取苗定位機構、苗木存儲機構以及栽植機構,取苗定位機構初步采用步進電機來提供動力,取苗末端執行器初步選擇氣缸來提供動力來夾苗。機械手部分進行栽植工作。總的來說,該機器人采用履帶式移動平臺+機械手驅動裝置+末端執行器+栽植裝置。
并且自動栽植機構的末端執行器設計,調試適當的空間角度,保證其不會造成苗木損壞,盡量做到結構簡單、尺寸較小、方便安裝;自動栽植機構的運動軌跡應盡量合理、采用桿機構,易于實現;自動栽植機構的設計應符合農藝要求,在此基礎上增加末端執行器的數量,從而提高取苗作業的工作效率。
1.2 主要機構設計
1.2.1 取苗定位機構
取苗定位機構采用步進電機來提供動力。
步進電機是一個數模轉換類控制電機,主要工作是將電脈沖轉為角位移。從機構角度上來講,步進電機主要為三種類型,分別是永磁式、混合式以及反應式步進電機。電機的控制源與機械運動轉速都與脈沖離不開關系,每一個脈沖被電機捕捉到,電機的轉子相應的轉過一個步距角,同時電機的轉速與脈沖頻率呈現同比關系。
通過對步進電機的三種類型的性能之間對比,本次課題選用HS步進電機。課題中的高精度、小步距角等一些要求恰是HS步進電機所有的特點。因此,本課題選用兩相四線的HS步進電機為設計研究目標。
1.2.2 栽植機構
栽植機構的設計其實主要包括取苗末端執行器與機械手部分的設計,其中取苗末端執行器選擇氣缸來提供動力夾苗。機械手顧名思義便是進行栽植。
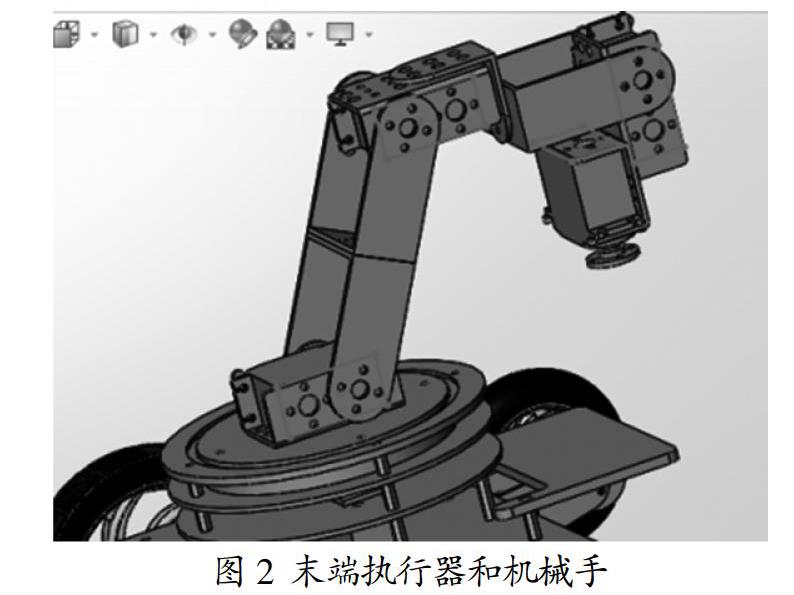
末端執行器:在機械手尾部裝有壓縮棉花,以防破壞苗木活性;壓土部分采用斜坡形式將土壓實。整個種植苗木過程:爪手松開,等苗木完全處在土坑中時,斜坡面下壓,填充穴孔,接下來向上舉起斜坡面,離開穴盤,完成整個過程。全過程的動力源通過使用氣缸裝置獲取。
氣缸主要是驅動活塞進行往復運動,使得空氣膨脹壓縮,在能的形式上將壓力能轉變為動能,是一種常見的氣動元件。本課題采用TN10X125號氣缸,屬于常見氣缸中的行程氣缸,其行程為125mm。
機械手:機械手為機器人的主體,一方面在移栽過程中,已經能夠精確的完成整個執行命令,另一方面也考慮到了在之后的發展中可添加其余指令空間。整個機械手的執行指令可以在電腦端或者控制器處下達。
2 自動苗木栽植機器人控制方案設計
2.1 末端執行器參數優化
為了達到精準夾持以降低傷苗率,需要對末端執行器的桿件參數進行優化設計,實現特定角度的夾苗、放苗,研究末端執行器夾苗軌跡。
2.1.1 末端執行器建模
以圖3所示的對稱機構,建立相應的數學模型。將原點取為上固定處曲柄端,建立平面坐標系軸。點A連接曲柄滑塊,為執行器BB'提供位移來源。苗針EF與連桿構件BC通過連桿CD,以固定端E為端點,夾苗處F點,使EF進行旋轉運動。
建立矢量方程:
將矢量方程化為解析形式,可以分別求解A,B,C,D,E,F點軌跡。
2.1.2 末端執行器參數初步優化
在進行末端機構執行指令中,有幾個重要的參數。一是苗木的轉動角,二是它的中心距。這兩個參數在整個行程中,就是夾取與移栽過程。因缽苗的基質受力、材質特性影響,夾取苗木的角度會在苗針通過存儲機構過程中有所變化。同時,基質的受力過大,會使得缽體變形而導致散垛,因此也要考慮到中心距要超過在此條件下的最大受力(最大的變形量),在斜坡面壓土過程后,為避免穴盤受到末端干擾,秒鐘的中心距和夾持角也要滿足不大于穴口的長度與不小于錐度兩個要求。考慮到不同夾持位置所相應的苗株受壓縮量與夾持角度的不同,通常我們都選取夾持基質發達的根部,即缽苗的中下部,這也是為了滿足送苗過程中,保證苗株的活性不受到傷害。
通過末端夾持機構運動學的建模方程,將桿件1OA,1AB,1BB,1B′C,1CD,1DE,1EF作為關鍵參數考察執行機構的夾持效果所受影響呈現為強耦合非線性。通過VB軟件,對以上桿件參數進行優化整合。為獲取穴口傾角度數與對應條件下基質所能達到的最大變形量且達到改變桿件各長度、固定端坐標位置、圖像界面的圖形這三個目的,以夾持角、移栽角、中心距等由e點的坐標等因素輸入得來的因素為程序參數與標準優化,且輸出各個因素參數。
通過以上方式調節參數后,得到的滿足精確夾持取苗的機構參數組合對應為1OA=5mm,1AB=20mm,1BB=62mm,1B′C=13mm,1CD=27mm,1DE=50mm,1EF=150mm,Xe=35mm。在此參數下,夾持角為16°,夾苗中心距為13mm。
2.2 末端執行器夾持動作軌跡分析
基于上述末端執行器各桿件參數,及固定參數。相應最佳夾持參數下中心矩為9.9mm和77.9mm,夾持度為7.6°,放苗度為1.2°。以輸出的各參數為標準,通過ADAMS建立機構模型。通過控制桿在氣缸為動力條件下帶動苗針完成完整的單次行程的動作,得出中心距-氣缸運動距離圖形。中心距作為Y軸參數,氣缸運動距離作為X軸參數,如圖5。
選取位移距離0-20mm,中心距0-10mm。通過仿真所得曲線圖,整個中心距在運動距離位移的增大過程中先降后升。在距離達到2.25與12.25mm時,中心距分別接近10與80mm,位移距離為10mm中心距范圍在69mm內,基本運動符合預期,仿真分析與理論分析基本一致。
3 試驗驗證
3.1 試驗目的及評價指標
考慮到取苗的定位控制與夾持控制對于整個末端機構的深度影響方面,這兩種控制程序所構成的系統是本試驗的主要內容。檢測末端執行的定位精確程度,來判別是否滿足運動控制定位的要求,最終以本試驗得到的數據觀察末端執行機構的取苗綜合能力和苗株存活率,以便于末端控制系統的優化。
3.2 試驗方案
末端執行機構控制系統以往復式間歇作為運動形式,其目的是將儲存機構中苗木進行栽植,運動定位控制系統的控制精度直接影響末端執行機構的取苗效果。因此,本試驗主要考核指標是末端執行機構定位控制的定位精度。
3.2.1 末端執行機構水平運動定位精度的研究
根據以上分析要求,主要分析機械手的定位過程的精度。將末端機構運行到苗株上10cm處,整個機構以水平端往復移動,操作模式采取單步運行。水平位移從15cm到44cm,測試點分別采取20、30、40cm處。測量時其條件設定參數為2000HZ脈沖值,25mm/s的水平位移速度。測量工具取syntek電子卡尺,由于其量程在0-150mm范圍之內,因此在每一測試點的前5cm需要進行預先標定,在此次試驗里,測量距離即是實際位移與標定的距離。原點選用水平位移的起始點,在每個位移點下以往返兩次作一次測量,取到達苗株坑側的位置,反復試驗十次,最后得出十組數據。以兩次數據之間的位置與往返精度,進行誤差分析,總計得出每組2個位置誤差與1個往返重復精度誤差。分析水平位移與其精度和重復定位精度關系。
3.2.2 末端執行機構升降定位精度的研究
根據水平運動精度的研究試驗,將試驗運動形式轉變為升降運動,使用相同的測量工具與方式,測量時條件系數不變。升降運動從4cm到6cm,以每5cm為測試的位移行程。原點選取為機械手升至的初始點,每次下降到測試位移的行程量時進行記錄。最后分析十次下降的位移數據。
3.2.3 末端執行機構工作性能測試
調整初始位置,符合工作標準,末端執行機構工作于自動模式進行完整的取苗工作測試。PLC輸出脈沖2000HZ,機械手水平行進速度25mm/s。
3.3 試驗結果與分析
試驗臺運行測試進行于2020年3月26日,測試得出預行測試方案數據。因栽植期不符合本地時期,缺少試驗所需素材,考慮塑料泡沫基質與測量素材所需值接近,故進行代替測量,以保證試驗順利進行。
在本次定位控制實驗過程中我們能夠發現,游標卡尺其實很難對機構定位精度進行一個非常準確的檢測,而在多次運行過程中,我們還能發現,其實測量誤差才是定位精度有關數據誤差的主要來源。在我們的實際運行過程中,由于機構震動或者人為等等不可控因素造成的測量基準的偏移很大,測量數據噪聲也很大,這就不能作為精度測定的依據。
在末端執行機構工作性能測試中,存儲機構并未受到機械手干涉,執行機構夾苗成功率遠超預設,但出現夾取后苗針鎖死在泡沫內部情況,考慮到泡沫與苗株生物特性差異,因此將此類情況排除在夾持依據之中。
4 結束語
設計了一種包括取苗定位機構、苗木存儲機構以及栽植機構的自動苗木栽植機器人,其機械手臂在執行整個程序過程中,對于苗株的移植、栽種,穴口的處理和整個過程的定位都達到預期效果,苗木移植栽種的效率得到提升,同時還需要對定位方面的精確程度處理需作出進一步的調整。
參考文獻:
[1]王振業.農業機械新技術的應用與推廣淺探[J].科學技術創新,2020(04):134-135.
[2]馬耀鋒,李紅麗.基于雙目視覺的農業機器人運動定位與避障研究[J].農機化研究,2020,42(09):228-232.
[3]王子彬.簡析智能機器人在農業自動化領域的應用[J].南方農機,2020,51(01):78.
[4]王永剛.農業機器人在農業生產上的應用[J].鄉村科技,2019(33):117-118.
[5]阮承治,趙德安,陳旭,等.雙指型農業機器人抓取球形果蔬的控制器設計[J].中國農機化學報,2019,40(11):169-175.
[6]張鵬,張麗娜,劉鐸,等.農業機器人技術研究現狀[J].農業工程,2019,9(10):1-12.
[7]李曉靜,余東滿.基于自適應蟻群算法的農用智能機器人路徑規劃[J].中國農機化學報,2019,40(09):189-193.
[8]任生蘭,石建業,張小泉,等.設施農業噴霧機器人路徑規劃與作業安全性探析[J].現代農業科技,2019(17):169-171.
[9]陳景帥.農業機器人的主要應用領域和關鍵技術[J].電子技術與軟件工程,2019(17):90-91.
[10]賈斌,熊小桃,王家豪.機器人的現狀及發展趨勢探析[J].中國新技術新產品,2019(16):117-118.