載人火星探測(cè)進(jìn)展及其EDL過(guò)程GNC關(guān)鍵技術(shù)
2020-07-30 02:58:42馬廣富龔有敏郭延寧高新洲
航空學(xué)報(bào) 2020年7期
馬廣富,龔有敏,郭延寧,高新洲
哈爾濱工業(yè)大學(xué) 控制科學(xué)與工程系,哈爾濱 150001
作為八大行星中距離地球最近的行星,火星自然條件與地球最為相似,已有大量跡象表明,火星以前很可能與地球一樣,也適合生物居住,在經(jīng)過(guò)幾十億年的演化才變成如今大氣稀薄、低溫和水源枯竭的樣子,甚至有天文學(xué)家認(rèn)為火星的現(xiàn)在就是地球的未來(lái)。因此,人們希望通過(guò)開(kāi)展火星大氣變化、火星表面和內(nèi)部演化等遠(yuǎn)距離觀測(cè)與就位探測(cè)任務(wù),完成以下科學(xué)目標(biāo)[1-3]:① 研究火星生命,確定火星是否出現(xiàn)過(guò)生命;② 研究火星氣候,進(jìn)而預(yù)測(cè)地球大氣的未來(lái);③ 研究火星地質(zhì)學(xué)和地質(zhì)物理學(xué),了解火星表面和內(nèi)部演化過(guò)程。進(jìn)一步地,通過(guò)對(duì)火星的研究,可預(yù)測(cè)地球未來(lái)的演化過(guò)程及火星能夠提供適合人類居住條件的可能性,為人類可持續(xù)發(fā)展做準(zhǔn)備。
隨著航天技術(shù)的發(fā)展和火星研究的深入,人類探測(cè)火星的方式不斷改進(jìn)和變化,已由最初的天文望遠(yuǎn)鏡觀測(cè)逐步發(fā)展,實(shí)現(xiàn)了火星飛越探測(cè)、環(huán)繞探測(cè)、就位探測(cè)以及無(wú)人巡游探測(cè)。從1960年開(kāi)始,由于蘇聯(lián)和美國(guó)之間航天霸權(quán)的競(jìng)爭(zhēng),火星探測(cè)迎來(lái)了發(fā)展的高峰期,不過(guò)由于當(dāng)時(shí)的技術(shù)條件,大多探測(cè)任務(wù)以失敗告終。隨著蘇聯(lián)的解體,俄羅斯放慢了探測(cè)火星的腳步,而美國(guó)頻頻傳來(lái)成功的喜訊。1998年日本發(fā)射了第1顆火星探測(cè)器——“希望號(hào)”,成為第3個(gè)加入火星探測(cè)的國(guó)家,“希望號(hào)”在到達(dá)火星前因燃料耗盡而宣告失敗[4]。21世紀(jì)后,歐空局、中國(guó)和印度也紛紛加入了火星探測(cè)的行列[5-8],歐空局和印度在一些火星探測(cè)任務(wù)中取得了成功。
隨著火星探測(cè)任務(wù)的不斷深入,世界各國(guó)也慢慢展開(kāi)了火星表面采樣返回、載人火星著陸探測(cè)和建立火星基地的研究。載人火星探測(cè)是除了月球之外載人深空探測(cè)的首選目標(biāo),具有非常重要的意義,首先,載人火星探測(cè)是高精尖科技的大集成,能夠帶動(dòng)多領(lǐng)域的科技發(fā)展;其次,隨著火星探測(cè)的不斷深入,無(wú)人探測(cè)的方式越來(lái)越難以滿足許多科學(xué)目標(biāo)的要求,需要通過(guò)載人探測(cè)完成更深入的研究;最后,通過(guò)載人火星探測(cè)能夠加快人類對(duì)火星的認(rèn)識(shí),進(jìn)而加快對(duì)地球演化過(guò)程的研究,為人類的可持續(xù)發(fā)展做貢獻(xiàn)。
從20世紀(jì)開(kāi)始就不斷有關(guān)于載人火星探測(cè)的提議和方案被提出,其中美國(guó)、前蘇聯(lián)/俄羅斯等國(guó)家提出了不少載人火星探測(cè)的方案[9-11],也做了較多技術(shù)儲(chǔ)備,尤其是美國(guó)[12-13]。在20世紀(jì)90年代開(kāi)始,美國(guó)不斷提出詳細(xì)的載人火星探測(cè)的技術(shù)方案,其中設(shè)計(jì)參考架構(gòu)5.0(Design Reference Architecture 5.0,DRA 5.0)和火星演化行動(dòng)(Evolvable Mars Campaign,EMC)針對(duì)載人火星探測(cè)的各個(gè)環(huán)節(jié)的方案及技術(shù)進(jìn)行了大量研究,給出了多種解決方案。
火星探測(cè)的整個(gè)EDL過(guò)程約為6~8 min,整個(gè)過(guò)程狀態(tài)變化快,而地球-火星之間通信的延遲大約在10 min以上,無(wú)法通過(guò)地面的科研人員輔助完成,是整個(gè)火星探測(cè)最為兇險(xiǎn)的階段,也是失敗率最高的階段。對(duì)于載人火星探測(cè)而言,保證EDL過(guò)程的安全直接關(guān)系著宇航員的生命安全,所以研究EDL過(guò)程具有非常重大的意義。
本文在總結(jié)了無(wú)人火星探測(cè)任務(wù)的基本情況的前提下,對(duì)比分析了無(wú)人火星探測(cè)和載人火星探測(cè),詳細(xì)介紹了俄羅斯和美國(guó)在載人火星探測(cè)中進(jìn)行的技術(shù)研究,總結(jié)歸納了載人火星探測(cè)存在的挑戰(zhàn),梳理了EDL過(guò)程中存在的一系列關(guān)鍵約束與問(wèn)題,并闡述了相關(guān)的GNC關(guān)鍵技術(shù)。
1 無(wú)人火星探測(cè)任務(wù)發(fā)展現(xiàn)狀
1.1 無(wú)人火星探測(cè)任務(wù)概況
人類早在17世紀(jì)即開(kāi)始使用望遠(yuǎn)鏡對(duì)火星進(jìn)行觀測(cè),1960年10月10日前蘇聯(lián)的“火星1A號(hào)”揭開(kāi)了人類通過(guò)發(fā)射探測(cè)器對(duì)火星進(jìn)行近距離探測(cè)的序幕,實(shí)現(xiàn)了從仰望星空到抵達(dá)星空的重要跨越。至今為止,世界各國(guó)在火星探測(cè)中取得了許多顯著成果[14-17]。
圖1統(tǒng)計(jì)了無(wú)人火星探測(cè)成敗的情況。從圖1可知,目前僅有美國(guó)、前蘇聯(lián)/俄羅斯、中國(guó)等6個(gè)國(guó)家組織進(jìn)行過(guò)火星探測(cè)任務(wù)。在無(wú)人火星探測(cè)任務(wù)中,失敗率高達(dá)44.64%;成功的案例中,美國(guó)占了絕大部分,高達(dá)80%,而且美國(guó)失敗的火星探測(cè)任務(wù)主要分布在早期的探測(cè)任務(wù)。
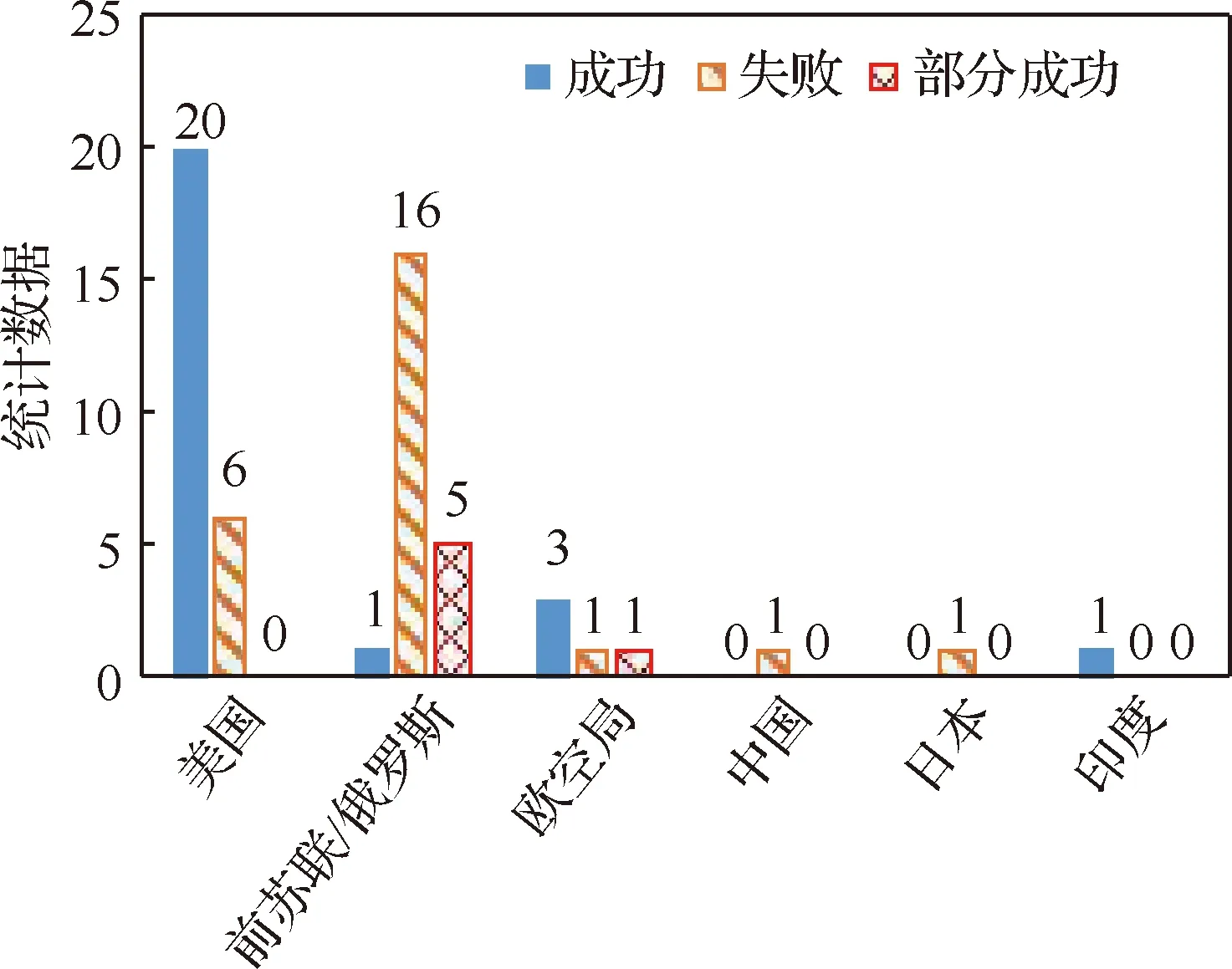
注:① 軌道器與著陸器分開(kāi)統(tǒng)計(jì); ② 俄羅斯與歐空局?jǐn)?shù)據(jù)中含1項(xiàng)由雙方合作研制成功的數(shù)據(jù)圖1 無(wú)人火星探測(cè)任務(wù)概況Fig.1 Overview of unmanned Mars exploration missions
歐空局先后進(jìn)行了5次火星探測(cè),僅有一次完全失敗。前蘇聯(lián)/俄羅斯進(jìn)行的火星探測(cè)任務(wù)數(shù)量?jī)H次于美國(guó),但大部分任務(wù)以失敗或部分失敗告終,唯一的一次完全成功是2016年與歐空局合作研制的火星微量氣體任務(wù)衛(wèi)星(ExoMars)。值得注意的是,中國(guó)首個(gè)火星探測(cè)器“螢火一號(hào)”在2011年11月8日搭乘俄羅斯的“福布斯-土壤”號(hào)開(kāi)始火星探測(cè)任務(wù),成為了第4個(gè)開(kāi)展火星探測(cè)任務(wù)的國(guó)家。遺憾的是“福布斯-土壤”號(hào)未能按計(jì)劃變軌,“螢火一號(hào)”也隨之失敗。
1.2 美國(guó)部分無(wú)人火星探測(cè)任務(wù)EDL概況
由于前蘇聯(lián)/俄羅斯和歐空局的火星探測(cè)任務(wù)在著陸后不久都宣告了任務(wù)的失敗,而美國(guó)具有非常豐富的成功經(jīng)驗(yàn),因此本節(jié)僅統(tǒng)計(jì)并比較美國(guó)部分成功著陸的無(wú)人火星探測(cè)器的EDL過(guò)程參數(shù),如表1所示[18-27]。由于“洞察號(hào)”火星探測(cè)器的數(shù)據(jù)不全,比較時(shí),部分EDL過(guò)程參數(shù)“洞察號(hào)”火星探測(cè)器不參與比較。由表1可知,目前EDL過(guò)程中美國(guó)無(wú)人火星探測(cè)器的質(zhì)量都相對(duì)較小,除火星科學(xué)實(shí)驗(yàn)室(Mars Science Laboratory, MSL)外,其他探測(cè)器的質(zhì)量均小于1 000 kg。在進(jìn)入階段,“海盜1號(hào)/2號(hào)”是唯一采用火星軌道進(jìn)入方式的探測(cè)器,其他探測(cè)器的進(jìn)入方式均為直接進(jìn)入方式;在直接進(jìn)入大氣的探測(cè)器中,“探路者號(hào)”的初始進(jìn)入速度最大,達(dá)到7.26 km/s,其他探測(cè)器的進(jìn)入速度相差較小,變化范圍在5.4~5.9 km/s之間。除“洞察號(hào)”外,僅“海盜1號(hào)/2號(hào)”和MSL通過(guò)質(zhì)心偏置完成升力控制,但是它們的升阻比均較小,分別為0.18和0.24,其他探測(cè)器的升阻比均為0。在姿態(tài)控制方面,“海盜1號(hào)/2號(hào)”“鳳凰號(hào)”和MSL采用了三軸反作用控制系統(tǒng)(Reaction Control System, RCS)進(jìn)行姿態(tài)控制,其他探測(cè)器依靠自旋穩(wěn)定。另外,MSL是目前為止唯一在大氣進(jìn)入段采用制導(dǎo)的著陸器,制導(dǎo)方式為阿波羅式制導(dǎo),使得其在大氣進(jìn)入段具有較高的進(jìn)入精度,進(jìn)而提高了著陸精度,成為著陸精度最高的探測(cè)器,而且MSL具有比其他探測(cè)器更大的彈道系數(shù),并首次采用空中吊車的著陸方式。
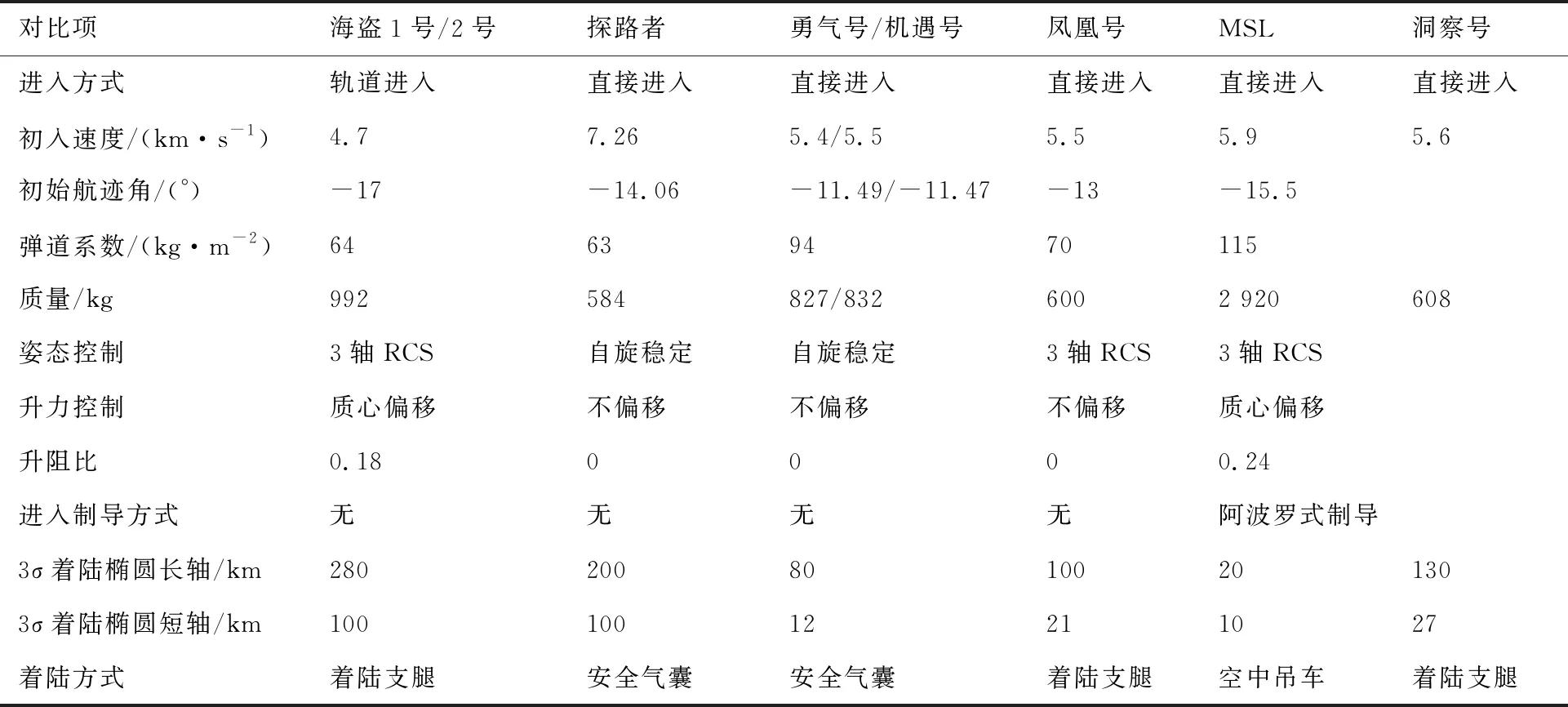
表1 美國(guó)部分成功無(wú)人火星探測(cè)任務(wù)EDL參數(shù)[18-27]Table 1 EDL parameters in part of successful US unmanned Mars missions [18-27]
2 載人火星探測(cè)方案及進(jìn)展
2.1 載人火星探測(cè)方案匯總
20世紀(jì)40年代末期,沃納·馮·布勞恩就提出了載人火星探測(cè)的設(shè)想。據(jù)不完全統(tǒng)計(jì),截止目前世界各國(guó)、組織、機(jī)構(gòu)共提出了45次載人火星探測(cè)方案。圖2統(tǒng)計(jì)了載人火星探測(cè)的提案情況。
從圖2可知,美國(guó)和前蘇聯(lián)/俄羅斯從20世紀(jì)就積極開(kāi)展載人火星探測(cè)方案的研究,其中美國(guó)提出的方案最多。進(jìn)入21世紀(jì)后,載人火星探測(cè)方案的提出有加速的趨勢(shì),數(shù)量上不到20年就已趕超20世紀(jì)60年代,歐空局也開(kāi)始了載人火星探測(cè)的相關(guān)研究,以“曙光計(jì)劃”為主[28]。除上述3個(gè)國(guó)家/組織外,法國(guó)、德國(guó)、中國(guó)和荷蘭也有關(guān)于載人火星探測(cè)的提議,但相對(duì)較少。下面將總結(jié)前蘇聯(lián)/俄羅斯和美國(guó)的典型載人火星探測(cè)計(jì)劃。
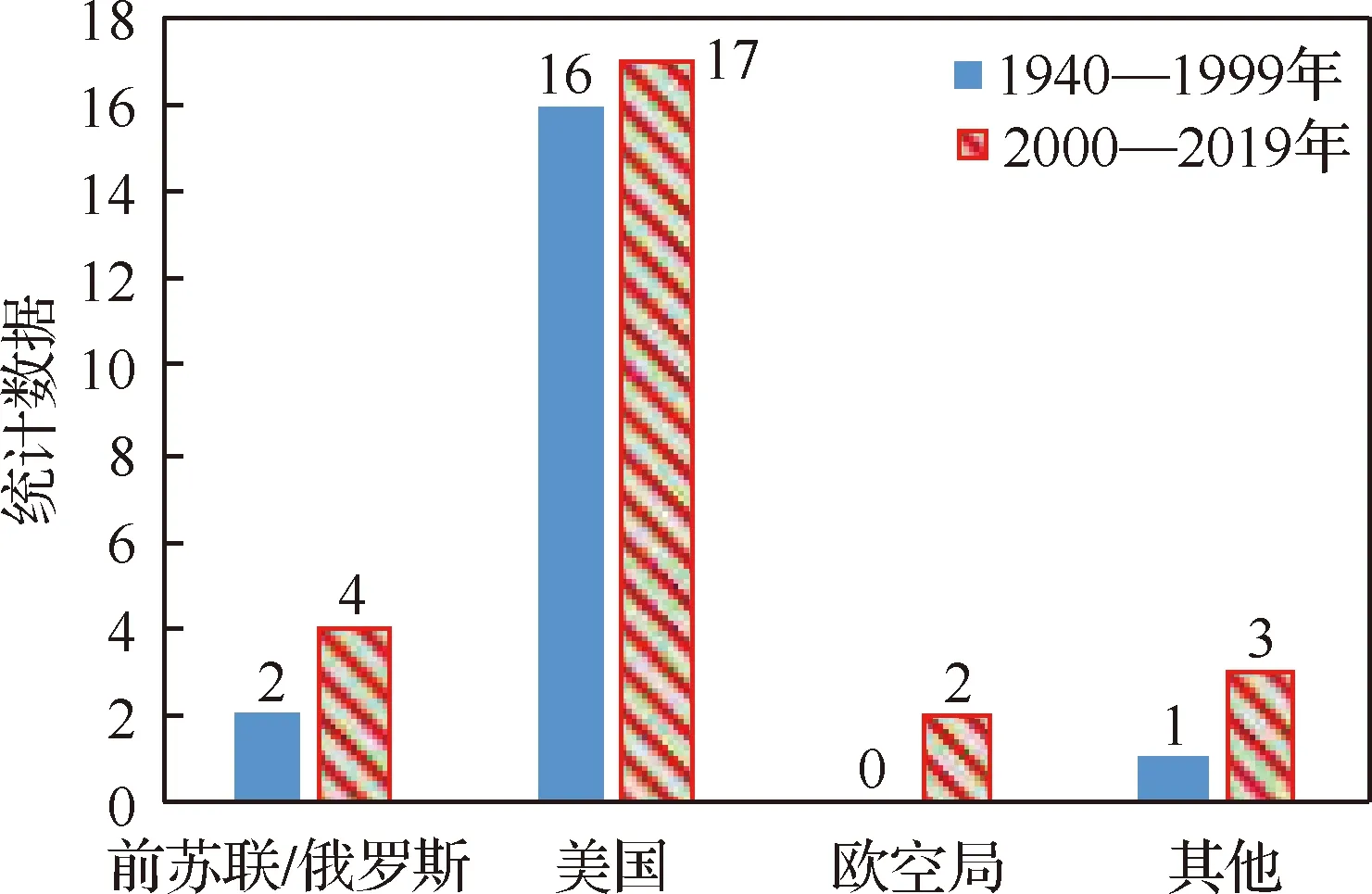
注:① 俄羅斯與歐空局?jǐn)?shù)據(jù)中包含1項(xiàng)由雙方共同合作項(xiàng)目圖2 載人火星探測(cè)方案統(tǒng)計(jì)Fig.2 Statistic of human Mars mission programs
2.2 前蘇聯(lián)/俄羅斯載人火星探測(cè)研究進(jìn)展
從20世紀(jì)60年代起前蘇聯(lián)/俄羅斯就開(kāi)始載人火星探測(cè)方案的研究和相關(guān)技術(shù)儲(chǔ)備。表2為部分前蘇聯(lián)/俄羅斯的載人火星探測(cè)方案。
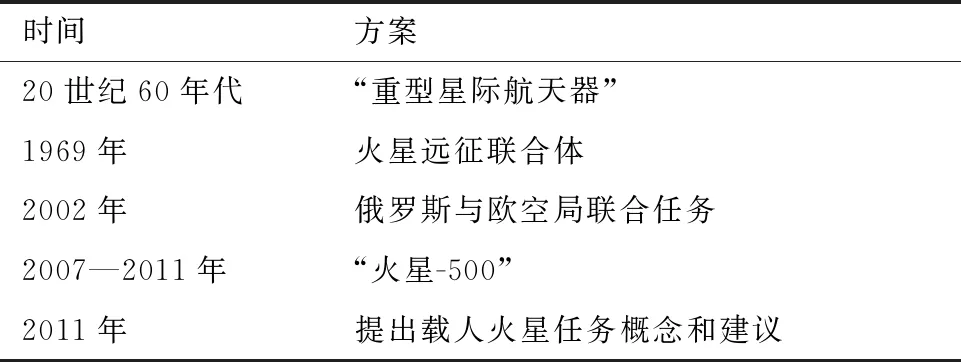
表2 部分前蘇聯(lián)/俄羅斯的載人火星探測(cè)方案
為了實(shí)現(xiàn)其載人火星探測(cè)方案,前蘇聯(lián)/俄羅斯一直在進(jìn)行著技術(shù)儲(chǔ)備,部分技術(shù)如圖3所示[29]:
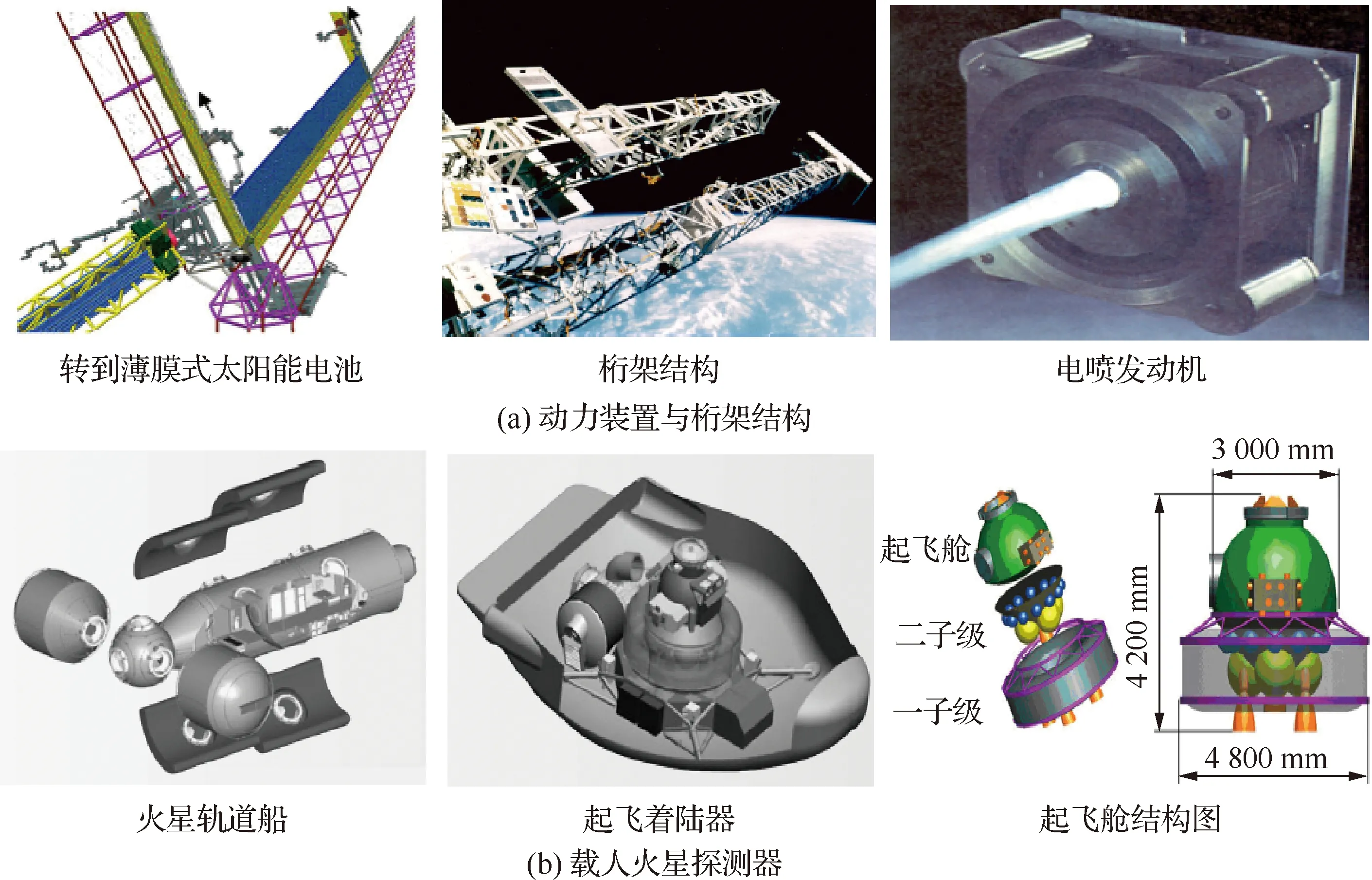
圖3 前蘇聯(lián)/俄羅斯載人火星探測(cè)部分技術(shù)Fig.3 Part technologies of Soviet Union/Russian human Mars mission
1) 大型運(yùn)載火箭:載人火星探測(cè)中運(yùn)載火箭需要多次發(fā)射,分別將貨運(yùn)飛船和載人飛船發(fā)射到近地軌道。前蘇聯(lián)/俄羅斯研制的“質(zhì)子M型”“安加拉7號(hào)”和“能源號(hào)”火箭等,可用于載人火星探測(cè)將不同部件送往地球近地軌道,并在近地軌道集結(jié)完成共同前往火星。
2) 在軌對(duì)接裝置:能夠保證由運(yùn)載火箭運(yùn)送到地球低軌道的不同部件對(duì)接組裝,目前俄羅斯已經(jīng)開(kāi)展了多次對(duì)接試驗(yàn),比如“進(jìn)步號(hào)”與“和平號(hào)”空間站對(duì)接以及2019年搭載攜帶人形機(jī)器人“費(fèi)奧多爾”的“聯(lián)盟MS-14”號(hào)宇宙飛船與國(guó)際空間站對(duì)接等。
3) 動(dòng)力裝置與桁架結(jié)構(gòu)技術(shù):動(dòng)力裝置主要包括薄膜式太陽(yáng)能電池和電噴發(fā)動(dòng)機(jī)2種。俄羅斯已成功研制了薄膜式太陽(yáng)能電池并在1998年10月在“和平號(hào)”空間站上完成實(shí)驗(yàn),DAS-55型電噴發(fā)動(dòng)機(jī)也已經(jīng)在軌工作。目前俄羅斯已經(jīng)展開(kāi)了新型太陽(yáng)能電池和電噴發(fā)動(dòng)機(jī)的研究。桁架結(jié)構(gòu)能夠用來(lái)安裝薄膜太陽(yáng)能電池等設(shè)備的基礎(chǔ),目前俄羅斯已經(jīng)在“禮炮號(hào)”和“和平號(hào)”空間站中進(jìn)行了桁架實(shí)驗(yàn),甚至可以建造300 m長(zhǎng)的桁架結(jié)構(gòu)。
4) 太陽(yáng)能拖船技術(shù):由2組電火箭發(fā)動(dòng)機(jī)、桁架結(jié)構(gòu)、薄膜太陽(yáng)能電池等為基礎(chǔ)建造太陽(yáng)能拖船,可以實(shí)現(xiàn)星際飛行,為了保證結(jié)構(gòu)間連接處沒(méi)有間隙,俄羅斯還應(yīng)用了“形狀記憶效應(yīng)”技術(shù),保證部件的某些材料在加熱后仍可恢復(fù)原來(lái)的形狀和尺寸。
5) 載人火星探測(cè)器:主要包含火星軌道船、起飛著陸器和返回地球飛船。火星軌道船以“恒星號(hào)”服務(wù)艙為雛形,主要系統(tǒng)已在“禮炮號(hào)”和“和平號(hào)”中開(kāi)展相關(guān)實(shí)驗(yàn);起飛著陸艙在登陸火星的過(guò)程中不采用傘降方式;返回地球飛船以Зонд號(hào)環(huán)繞月球飛船為原型,且Зонд-4和Зонд-7號(hào)飛船曾在1969年搭乘動(dòng)物環(huán)月飛行。
6) “火星-500”:由俄羅斯、歐空局和中國(guó)參與的地面模擬載人火星探測(cè)的實(shí)驗(yàn),艙內(nèi)環(huán)境完全模擬火星環(huán)境,目的是獲取長(zhǎng)時(shí)間深空任務(wù)下人的心理和醫(yī)療數(shù)據(jù)。“火星-500”已在2010年6月3日17時(shí)至2011年11月4日18時(shí)完成了520天實(shí)驗(yàn),模擬飛往火星、環(huán)繞火星、登陸火星和返回地球的全過(guò)程,獲取了寶貴的實(shí)驗(yàn)數(shù)據(jù),其中中國(guó)航天員王躍參與了整個(gè)實(shí)驗(yàn)過(guò)程。
2.3 美國(guó)載人火星探測(cè)研究進(jìn)展
從20世紀(jì)開(kāi)始,美國(guó)以NASA為主不斷地提出關(guān)于載人火星探測(cè)的計(jì)劃和方案,并開(kāi)展了很多技術(shù)研究,近些年來(lái)民營(yíng)公司SpaceX也在積極為載人火星探測(cè)做準(zhǔn)備[30-35]。表3給出了美國(guó)部分主要的載人火星探測(cè)方案。
表3 部分美國(guó)載人火星探測(cè)方案Table 3 Part of US human Mars mission programs
在眾多載人火星探測(cè)方案中,NASA針對(duì)DRA5.0和EMC開(kāi)展了大量的研究和實(shí)驗(yàn)[36],比如已經(jīng)在NASA蘭利研究中心的馬赫數(shù)6.0的0.6 m風(fēng)洞中進(jìn)行了中等升阻比飛行器的外形實(shí)驗(yàn)。
美國(guó)在DRA5.0計(jì)劃中詳細(xì)給出了載人火星探測(cè)的流程[31, 37-38],而目前主要以深空探測(cè)門戶Gateway計(jì)劃為主。深空門戶(Deep Space Gateway,DSG)計(jì)劃是美國(guó)在21世紀(jì)初提出的深空探測(cè)計(jì)劃,目標(biāo)是在地球與月球的拉格朗日點(diǎn)建立深空探測(cè)平臺(tái)[39-40],隨著美國(guó)重返月球計(jì)劃的提出,DSG迎來(lái)了新一輪發(fā)展[41],NASA計(jì)劃在21世紀(jì)20年代完成Gateway空間平臺(tái)建立,并開(kāi)展月球采樣返回、載人登月,將月球作為載人火星探測(cè)或其他行星探測(cè)的技術(shù)驗(yàn)證基地[42-43],特別是為載人火星探測(cè)做準(zhǔn)備[44]。DSG計(jì)劃主要?jiǎng)澐?個(gè)階段[45]:
1) DSG的建立:獵戶座載人飛船作為指揮平臺(tái),完成電推進(jìn)測(cè)試、深空居住艙建立等。
2) 運(yùn)輸傳遞與試航:建立深空運(yùn)輸(Deep Space Transport,DST)工具,采用100 kW電推進(jìn),具備能夠維持宇航員的生存等條件。
3) 火星運(yùn)輸:能夠完成1 000天的星際航行,載人航行等。
DSG計(jì)劃載人火星探測(cè)的整個(gè)流程如圖4所示[46],DRA5.0流程與此類似,本文不再贅述。
1) 使用獵戶座分多次將貨運(yùn)飛船及載人飛船運(yùn)輸?shù)紻SG,并進(jìn)行DST的組裝與檢測(cè),完成后獵戶座返回地球,對(duì)應(yīng)圖4中的 ①~⑤。
2) DST進(jìn)行軌道轉(zhuǎn)移,約390天后到達(dá)火星高軌道,對(duì)應(yīng)圖4中的 ⑥~⑦。
3) 著陸器與DST分離,著陸到火星表面,DST繼續(xù)運(yùn)行在火星高軌道,對(duì)應(yīng)圖4中的 ⑧ 和 ⑩。
4) 約300天后,宇航員搭乘上升器返回火星軌道與DST交會(huì)對(duì)接,對(duì)應(yīng)圖4中的⑨和。
5) 約經(jīng)過(guò)370天,DST返回到地球高軌道(HEO),對(duì)應(yīng)圖4中~。
6) 發(fā)射獵戶座至HEO,與DST交會(huì)對(duì)接,宇航員搭乘獵戶座返回地球,對(duì)應(yīng)圖4中。
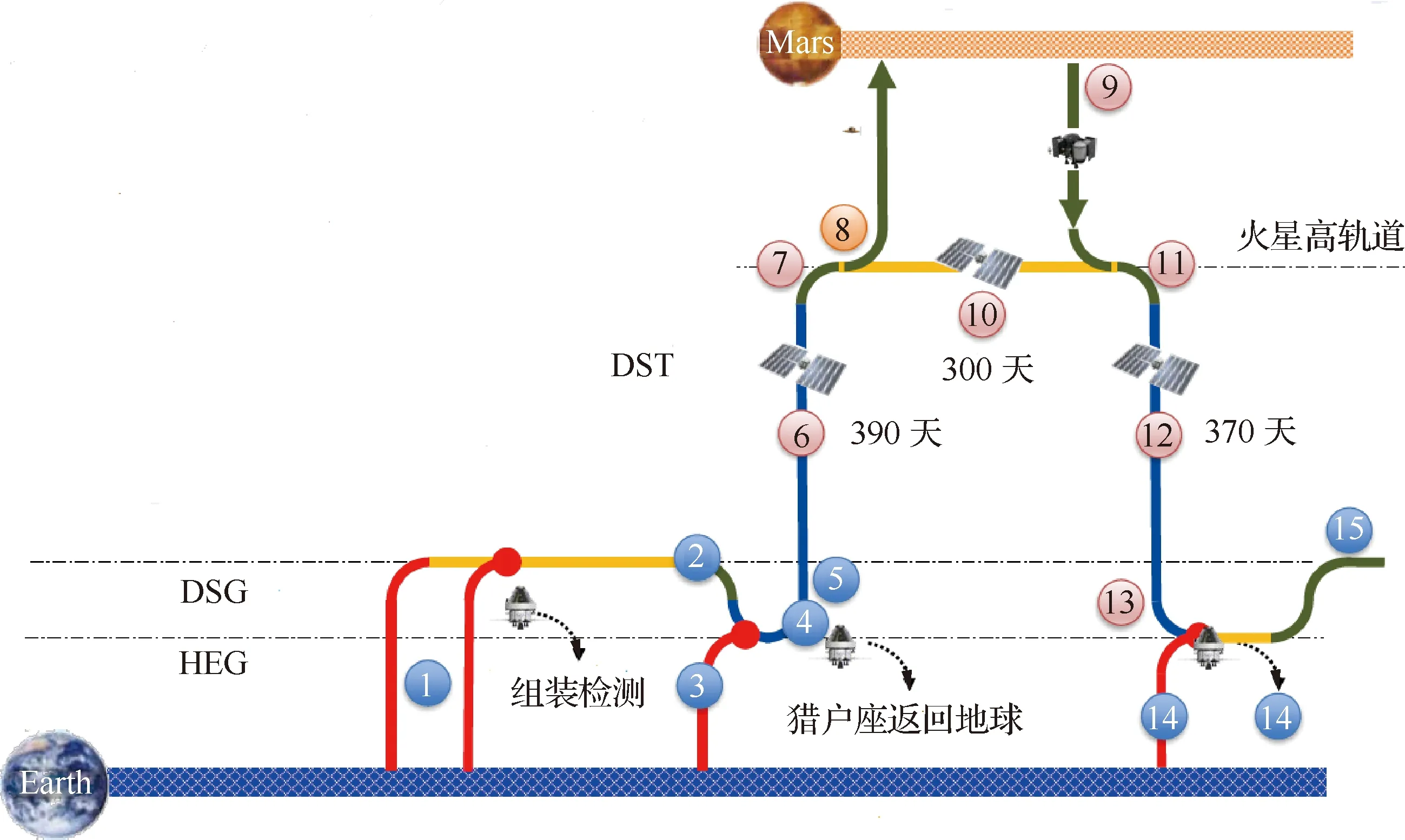
圖4 DSG任務(wù)過(guò)程[46]Fig.4 DSG mission profile[46]
根據(jù)美國(guó)已有的載人火星探測(cè)方案,將目前實(shí)現(xiàn)的技術(shù)儲(chǔ)備總結(jié)如下[30, 47-60],部分設(shè)計(jì)圖如圖5所示。
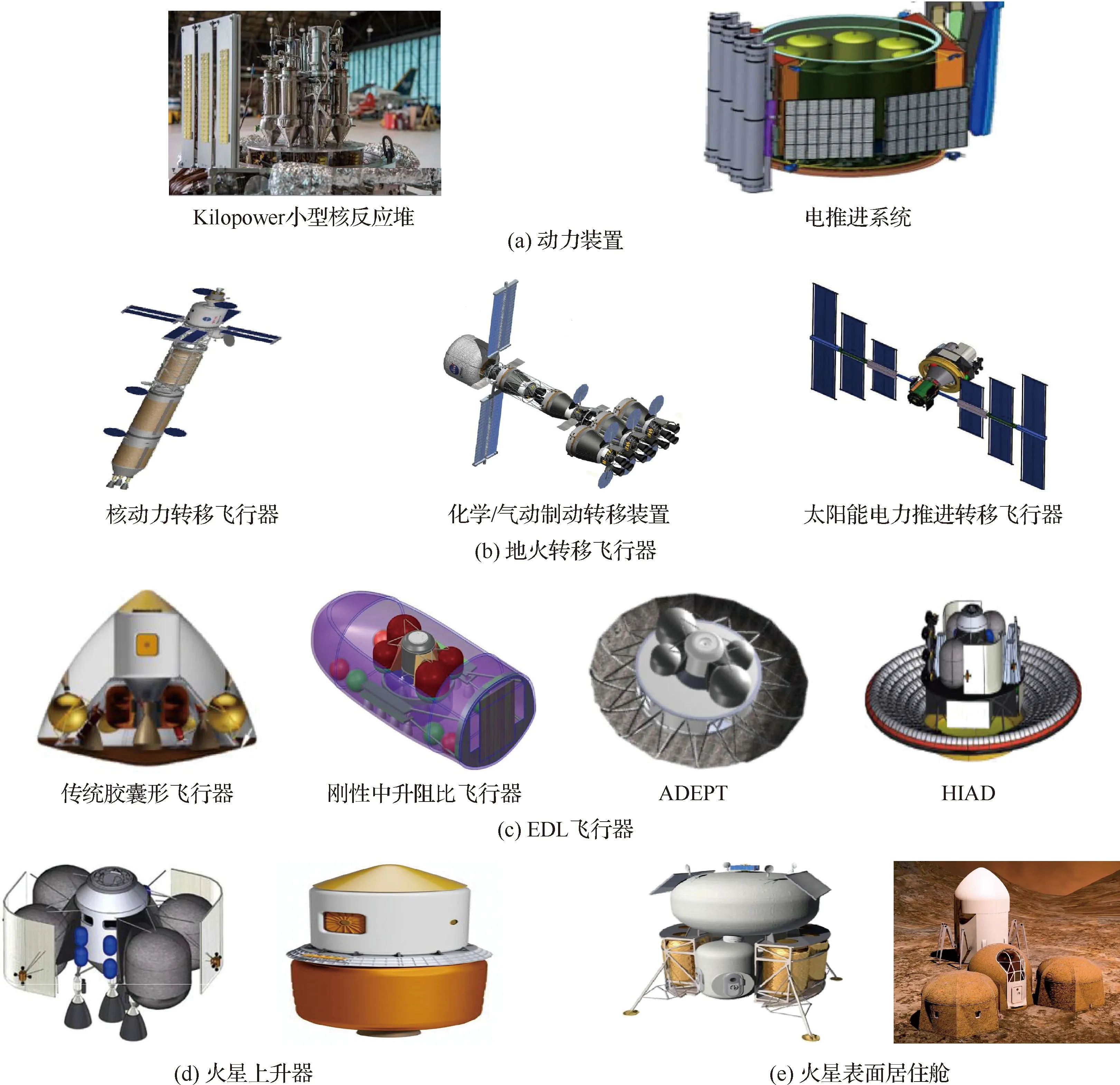
圖5 部分美國(guó)載人火星探測(cè)技術(shù)Fig.5 Part of US human Mars mission technologies
1) 運(yùn)載火箭:NASA計(jì)劃將“戰(zhàn)神一”和“戰(zhàn)神五”運(yùn)載火箭作為載人火星探測(cè)的運(yùn)載火箭。同樣,SpaceX公司也為載人火星探測(cè)研制了“大獵鷹”火箭。
2) 載人飛船:NASA將新一代載人飛船“獵戶座”作為載人火星探測(cè)飛船,能搭載4名宇航員,SpaceX公司也研發(fā)了“載人龍”飛船。
3) 動(dòng)力裝置[61-63]:NASA與洛斯阿拉莫斯國(guó)家實(shí)驗(yàn)室合作研發(fā)了小型核反應(yīng)堆Kilopower并且已經(jīng)完成了測(cè)試,可作為飛船與火星表面居住的動(dòng)力來(lái)源。同時(shí)NASA在EMC方案中設(shè)計(jì)了利用太陽(yáng)能電池陣和氙氣的150 kW的電推進(jìn)系統(tǒng)。
4) 地火轉(zhuǎn)移飛行器[64]:宇航員往返火星和地球的星際間飛行器,EMC設(shè)計(jì)了利用太陽(yáng)能推進(jìn)的地火轉(zhuǎn)移飛行器,DRA5.0設(shè)計(jì)了核動(dòng)力地火轉(zhuǎn)移飛行器和化學(xué)/氣動(dòng)制動(dòng)地火轉(zhuǎn)移飛行器。
5) 火星上升器[65-67]:將宇航員從火星表面送到軌道上與地火轉(zhuǎn)移飛行器交會(huì)的飛行器,一般由兩級(jí)飛行器構(gòu)成,其推進(jìn)劑在到達(dá)火星表面后利用火星的資源與攜帶的部分資源進(jìn)行生產(chǎn)。表4 對(duì)比了阿波羅月球上升器、牽牛星月球上升器和載人火星上升器的部分參數(shù)[56]。
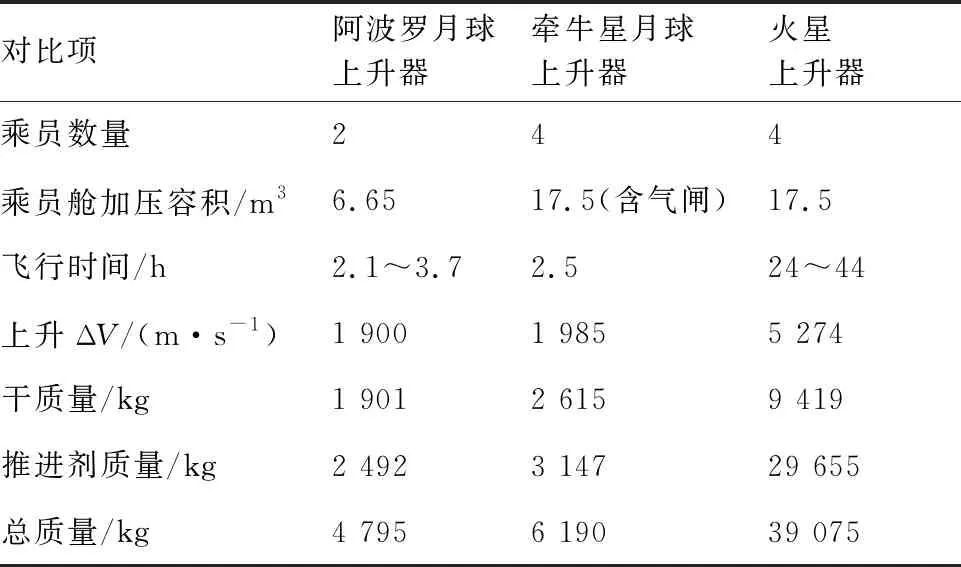
表4 阿波羅、牽牛星和火星上升器部分參數(shù)對(duì)比
6) 火星表面居住艙:宇航員在火星表面居住和生活的場(chǎng)所,能夠滿足6名宇航員至少550天的生活需求,且具有高可靠性。從2015年起,NASA組織了多次火星居住艙設(shè)計(jì)與建設(shè)獎(jiǎng)項(xiàng)計(jì)劃,誕生了很多設(shè)計(jì)方案[68]。
7) EDL飛行器[48, 55, 69-70]:NASA按照速度將載人火星探測(cè)EDL過(guò)程劃分為高超聲速、超聲速和亞聲速/終端下降3個(gè)階段,針對(duì)這3個(gè)不同的階段設(shè)計(jì)了多種不同構(gòu)型的EDL飛行器,主要分為2類,第1類是在原有技術(shù)基礎(chǔ)上進(jìn)行改進(jìn)設(shè)計(jì),主要包括傳統(tǒng)的膠囊形的飛行器和中升阻比的剛性飛行器;第2類是采用新技術(shù)重新設(shè)計(jì),主要是采用可展開(kāi)的熱防護(hù)系統(tǒng)(Thermal Protection System, TPS)材料設(shè)計(jì)的飛行器,包含在框架上安裝柔性TPS薄膜的自適應(yīng)可展開(kāi)進(jìn)入和放置技術(shù)(Adaptive Deployable Entry and Placement Technology, ADEPT)飛行器和用柔性TPS薄膜覆蓋的充氣堆疊環(huán)面結(jié)構(gòu)構(gòu)成的高超聲速充氣氣動(dòng)減速器(Hypersonic Inflatable Aerodynamic Decelerator, HIAD),這一類飛行器在EDL過(guò)程中才會(huì)展開(kāi),能夠減小運(yùn)載火箭整流罩的半徑以及地火轉(zhuǎn)移飛行器的容積。目前ADEPT已完成多次縮比模型的小型飛行測(cè)試,HIAD也已完成多次熱脈沖實(shí)驗(yàn),如圖6所示。
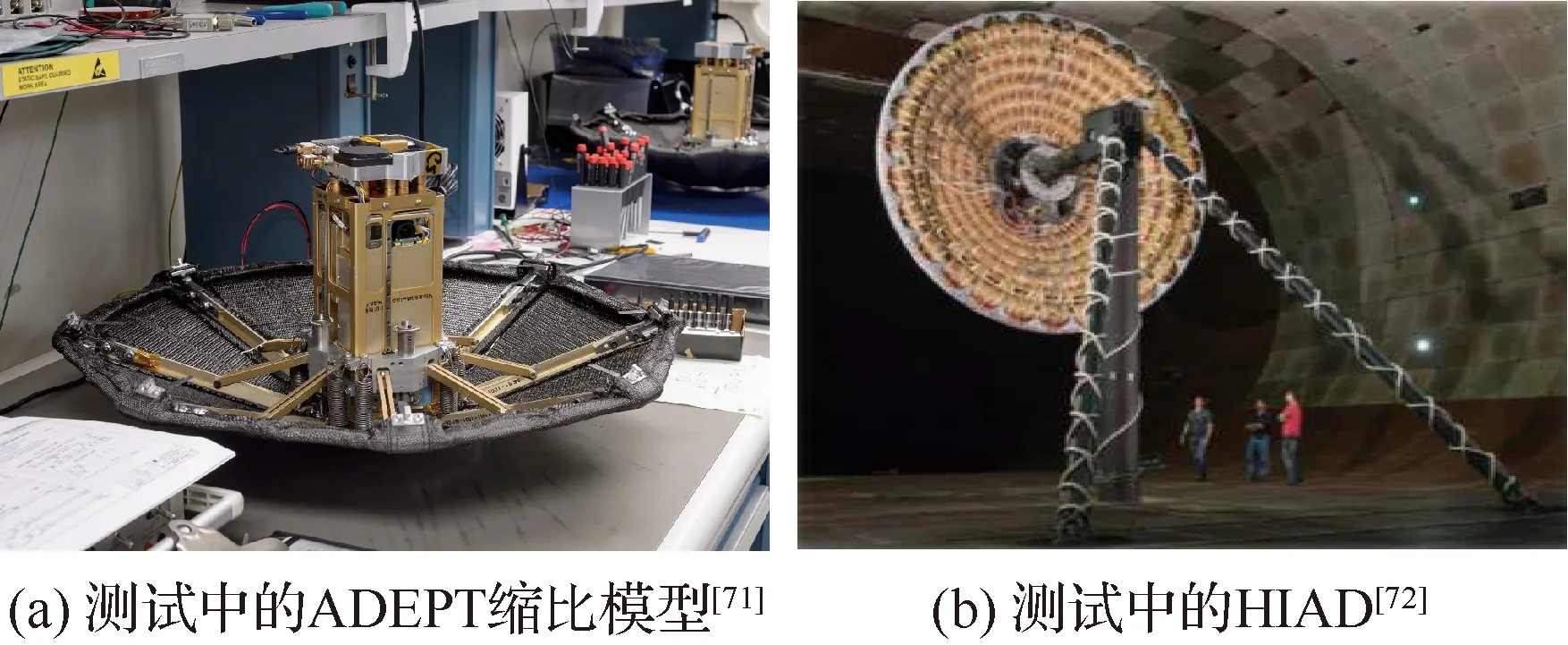
圖6 實(shí)驗(yàn)中的ADEPT和HIADFig.6 ADEPT and HIAD in experiments
3 載人火星探測(cè)特點(diǎn)
3.1 載人火星探測(cè)與載人月球探測(cè)對(duì)比
從1969年7月21日美國(guó)的“阿波羅11號(hào)”開(kāi)始,美國(guó)相繼成功進(jìn)行了6次載人月球探測(cè)任務(wù),成為了世界上唯一一個(gè)將人類送至地球外天體的國(guó)家,中國(guó)和前蘇聯(lián)/俄羅斯也有無(wú)人探測(cè)器在月球著陸的成功案例,相比于載人月球探測(cè),載人火星探測(cè)所受到的約束更多。表5對(duì)比了載人火星探測(cè)和載人月球探測(cè)任務(wù)的區(qū)別[31]。
從表5可知,載人火星探測(cè)的任務(wù)周期更久,且物資補(bǔ)給受限于火星發(fā)射窗口,每26個(gè)月一次。另外,很重要的一點(diǎn)是,載人月球探測(cè)的雙向通信延遲約為2.6 s,在著陸的過(guò)程中地面的科技人員能夠介入到整個(gè)EDL過(guò)程以提高成功著陸的概率,而載人火星探測(cè)的雙向通信延遲為6~44 min,而整個(gè)EDL過(guò)程僅約8 min,使得地面工作人員無(wú)法介入EDL過(guò)程,這對(duì)載人火星探測(cè)的自主性、可靠性與安全性提出了更高的要求。綜上,雖然目前已有載人月球探測(cè)的經(jīng)驗(yàn),但載人火星探測(cè)還存在極大的挑戰(zhàn)等待解決。
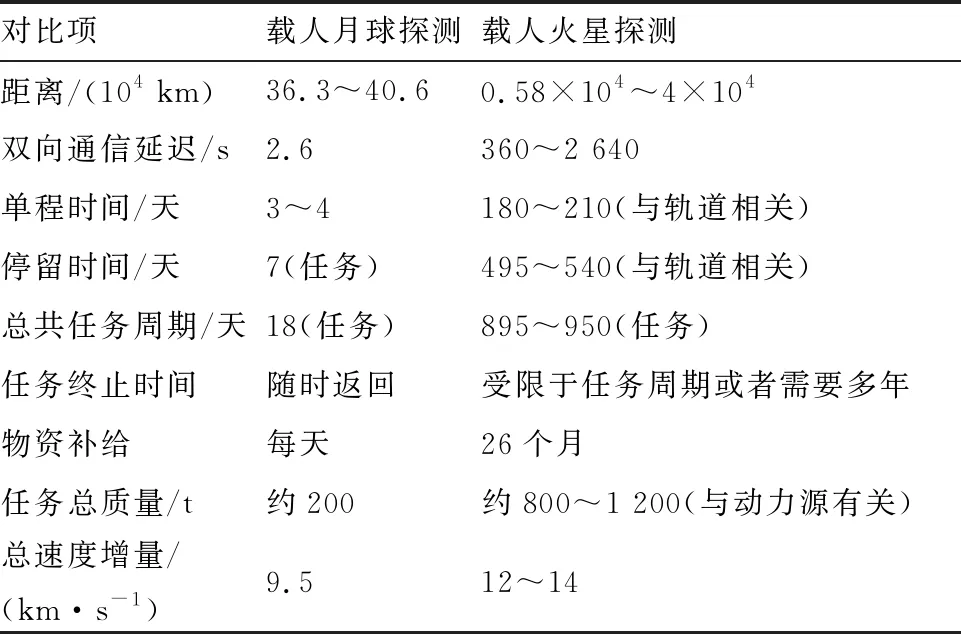
表5 載人月球探測(cè)與載人火星探測(cè)對(duì)比[31]
3.2 載人火星探測(cè)EDL過(guò)程的特點(diǎn)
可以將載人火星探測(cè)的EDL過(guò)程特點(diǎn)總結(jié)如下[23, 30, 32, 49, 73-75]。
1) 進(jìn)入質(zhì)量極大:一般而言,無(wú)人火星探測(cè)器的質(zhì)量大部分在1 t左右,載人地球再入質(zhì)量在10 t以內(nèi),而載人月球探測(cè)和載人火星探測(cè)由于有上升返回裝置等,質(zhì)量都較大,載人月球探測(cè)一般在20 t以內(nèi),而由于載人火星探測(cè)需要保證宇航員在火星表面的長(zhǎng)時(shí)間正常生活及工作且補(bǔ)給周期比載人月球大得多,因此載人火星探測(cè)一般則在40 t以上。
2) 減速技術(shù)革新:載人地球再入和載人月球探測(cè)僅需利用單一的減速方式就能將探測(cè)器的速度減速到安全范圍,減速方式分別為減速傘和反推力器;但火星大氣稀薄,大氣進(jìn)入段和減速傘段無(wú)法將火星著陸器速度減到安全值,仍需要利用反推發(fā)動(dòng)機(jī)(或者緩沖氣囊及空中吊車等)技術(shù)繼續(xù)吸收或抵消動(dòng)能以保證著陸安全。特別是載人火星探測(cè)器,由于質(zhì)量極大,若僅采用減速傘減速,則要求減速傘的面積極大,將增加任務(wù)的難度和著陸失敗的概率,因此,載人火星探測(cè)器往往在高超聲速階段就需要采用具有革新技術(shù)的超聲速反推力器代替減速傘進(jìn)行減速。
3) 著陸精度更高:在載人火星探測(cè)任務(wù)中,往往將整個(gè)探測(cè)任務(wù)需求的物資及載人任務(wù)艙分別在多次發(fā)射窗口中分別發(fā)射到達(dá)火星表面,要求每次單獨(dú)發(fā)射的物資及載人任務(wù)艙在到達(dá)火星表面的位置盡可能的靠近,因此,一般要求著陸精度能達(dá)到50~100 m。
4) 測(cè)控系統(tǒng)種類少但要求更高:載人地球再入能夠調(diào)用地面豐富的測(cè)控網(wǎng)絡(luò)對(duì)返回艙進(jìn)行測(cè)控,而火星探測(cè)任務(wù)僅能利用特定的天基和地基測(cè)控網(wǎng)絡(luò)進(jìn)行測(cè)控,相對(duì)而言種類較少。但是為了能達(dá)到載人火星任務(wù)的需求,對(duì)測(cè)控系統(tǒng)的要求將比載人地球再入更高。
5) 任務(wù)階段不同:無(wú)人火星探測(cè)任務(wù)的著陸過(guò)程一般包括進(jìn)入、下降與著陸(EDL)3個(gè)階段[76],而無(wú)人火星采樣返回任務(wù)和載人火星探測(cè)任務(wù)中還需要保證樣品或宇航員能夠從火星表面安全返回到地球,所以需要包含火星EDL和上升、返回等5個(gè)階段[57]。
4 載人火星探測(cè)體系構(gòu)成及挑戰(zhàn)
4.1 載人火星探測(cè)體系構(gòu)成
綜合已有的火星探測(cè)計(jì)劃和進(jìn)展情況,本文總結(jié)給出了載人火星探測(cè)體系結(jié)構(gòu),如圖7所示。主要包含無(wú)人探測(cè)系統(tǒng)、運(yùn)輸系統(tǒng)、火星表面應(yīng)用系統(tǒng)和測(cè)控系統(tǒng)。
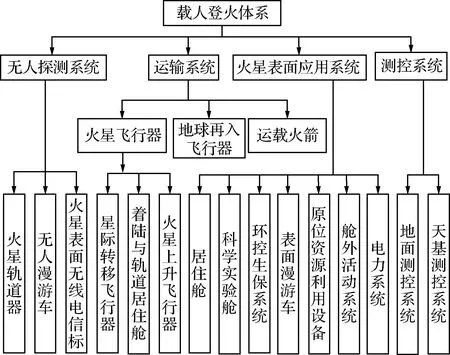
圖7 載人火星探測(cè)體系構(gòu)成Fig.7 Composition of human Mars mission systerns
1) 無(wú)人探測(cè)系統(tǒng):主要包括火星軌道器、前期的無(wú)人漫游車以及前期投放的無(wú)人無(wú)線電信標(biāo)等構(gòu)成,目的是對(duì)載人探測(cè)的環(huán)境進(jìn)行考察以及著陸點(diǎn)選址、技術(shù)驗(yàn)證和無(wú)線電導(dǎo)航等。
2) 運(yùn)輸系統(tǒng):包括運(yùn)載火箭、地球再入飛行器和多種不同的火星飛行器。星際轉(zhuǎn)移飛行器實(shí)現(xiàn)地球軌道與火星軌道間的轉(zhuǎn)移,完成宇航員及物資在地球軌道和火星軌道之間的運(yùn)送;著陸與軌道居住艙是宇航員在軌道轉(zhuǎn)移和EDL過(guò)程的居住艙,也能在火星表面使用;火星上升器將宇航員從火星表面運(yùn)送至火星軌道。
3) 火星表面應(yīng)用系統(tǒng):其中包括居住艙是宇航員在火星表面的居住場(chǎng)所;科學(xué)實(shí)驗(yàn)艙是宇航員在火星表面進(jìn)行科學(xué)實(shí)驗(yàn)的場(chǎng)所;環(huán)控生保系統(tǒng)能夠?yàn)橛詈絾T提供生存的條件;表面漫游車提供宇航員在火星表面移動(dòng)探測(cè);原位資源利用設(shè)備即為在火星表面利用火星資源生產(chǎn)能源、推進(jìn)劑等的設(shè)備;艙外活動(dòng)系統(tǒng)為宇航員艙外活動(dòng)提供保障;電力系統(tǒng)保障系統(tǒng)的電力供給。
4) 測(cè)控系統(tǒng):包括地面測(cè)控系統(tǒng)和天基測(cè)控系統(tǒng)。地面測(cè)控系統(tǒng)包括地面的各種測(cè)控網(wǎng)絡(luò),天基測(cè)控系統(tǒng)包括中繼衛(wèi)星、導(dǎo)航及通信衛(wèi)星等,利用測(cè)控系統(tǒng),能夠保證火星表面設(shè)備與地面科研人員的通信,傳輸實(shí)驗(yàn)數(shù)據(jù)或介入火星表面設(shè)備問(wèn)題處置等。
4.2 載人火星探測(cè)集結(jié)方式
載人火星探測(cè)任務(wù)的總質(zhì)量較大,超過(guò)現(xiàn)有任一運(yùn)載火箭的單次運(yùn)載能力,且若將宇航員及物資在地面組裝好一同發(fā)射則要求運(yùn)載火箭具有很大的整流罩,這都不現(xiàn)實(shí)。因此,載人火星探測(cè)需要將各個(gè)模塊分成多個(gè)批次通過(guò)不同的運(yùn)載火箭發(fā)射至地球軌道,在地球軌道進(jìn)行集結(jié)組裝然后前往火星。同樣,當(dāng)宇航員從火星表面返回地球時(shí),先乘坐上升器到達(dá)火星軌道或者繞火軌道,與軌道上的飛船交會(huì)對(duì)接再返回地球。在阿波羅登月的開(kāi)始階段,美國(guó)也提出了多種集結(jié)方式,同樣,美國(guó)也開(kāi)展了載人火星探測(cè)的各種集結(jié)方式的研究,表6對(duì)比了阿波羅登月和載人火星探測(cè)主要研究的幾種集結(jié)方式。

表6 阿波羅號(hào)與載人火星探測(cè)集結(jié)方式Table 6 Assembly of Apollo and human Mars missions
在阿波羅登月任務(wù)中,科研人員在綜合考慮后最終選用了月球軌道集結(jié)的方式。針對(duì)載人火星探測(cè)的集結(jié)方式,直接起飛的出發(fā)集結(jié)方式可用于小模塊,火星表面集結(jié)的返回集結(jié)方式要求火星上升器具備足夠的運(yùn)載能力才能把在火星表面集結(jié)好的裝置送至火星軌道或繞火軌道,而上升器推力難以滿足要求,而火星繞飛軌道集結(jié)的返回集結(jié)方式因?yàn)樵诶@飛軌道上飛船的速度很大,也大大加大了集結(jié)的難度,因此,目前載人火星探測(cè)方案中大多采用地球低軌道集結(jié)或者地月軌道集結(jié)的出發(fā)集結(jié)方式和火星軌道集結(jié)的返回集結(jié)方式。
4.3 載人火星探測(cè)存在的挑戰(zhàn)
載人火星探測(cè)根據(jù)飛行器當(dāng)前所處的位置以及狀態(tài)大致可分為地球軌道、地火轉(zhuǎn)移軌道、繞火軌道、EDL過(guò)程、火星表面以及上升返回6個(gè)階段。在各個(gè)階段中,載人火星探測(cè)所面臨的主要挑戰(zhàn)各有不同,表7總結(jié)了各個(gè)階段中所要解決的主要技術(shù)難題。
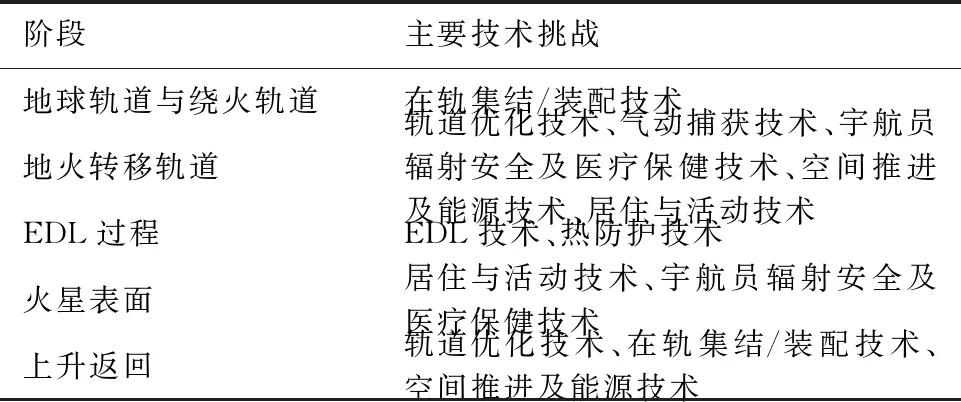
表7 載人火星探測(cè)各階段的主要技術(shù)挑戰(zhàn)
NASA載人火星探測(cè)任務(wù)評(píng)估報(bào)告中介紹了以下8項(xiàng)技術(shù),將EDL技術(shù)、空間推進(jìn)及能源技術(shù)、宇航員輻射安全及醫(yī)療保健技術(shù)作為3大關(guān)鍵技術(shù)[77]。
1) 在軌集結(jié)/裝配技術(shù):完成不同模塊在地球軌道和火星軌道的集結(jié)與裝配,形成飛行器整體前往火星或者返回地球。
2) 軌道優(yōu)化技術(shù):載人火星探測(cè)必須考慮到宇航員的安全與空間耐受能力,因此軌道轉(zhuǎn)移時(shí)間越短越好,但由于探測(cè)器質(zhì)量較大,其燃料消耗是不可回避的問(wèn)題。因此,針對(duì)各方面的約束,多體軌道動(dòng)力學(xué)建模、誤差分析與數(shù)值仿真、天體借力飛行軌道設(shè)計(jì)及探測(cè)器參數(shù)對(duì)軌道的影響等軌道優(yōu)化關(guān)鍵技術(shù)的研究是必要的。
3) 居住與活動(dòng)技術(shù):在載人火星探測(cè)任務(wù)中,運(yùn)載火箭的運(yùn)載能力及運(yùn)載空間都是有限的,而且物資補(bǔ)給受限于探測(cè)窗口,所以居住與活動(dòng)設(shè)備應(yīng)具備質(zhì)量小、占用空間小、能長(zhǎng)時(shí)間滿足宇航員生活需求且具有高可靠性和可維修性。因此,在居住與活動(dòng)技術(shù)中應(yīng)研究輕型可展開(kāi)結(jié)構(gòu)、空氣/水封閉技術(shù)、行星表面植物種植技術(shù)及行星表面敏捷活動(dòng)技術(shù)等。
4) 氣動(dòng)捕獲技術(shù)[78]:氣動(dòng)捕獲可以結(jié)合推力器實(shí)現(xiàn)火星制動(dòng)捕獲,以減少燃料消耗,進(jìn)而減輕運(yùn)載的質(zhì)量。氣動(dòng)捕獲是一種風(fēng)險(xiǎn)相對(duì)較低的技術(shù),主要包含10個(gè)步驟,如圖8所示,盡管目前氣動(dòng)捕獲技術(shù)未在實(shí)際任務(wù)中實(shí)施,但研究已經(jīng)證實(shí)了其可行性。
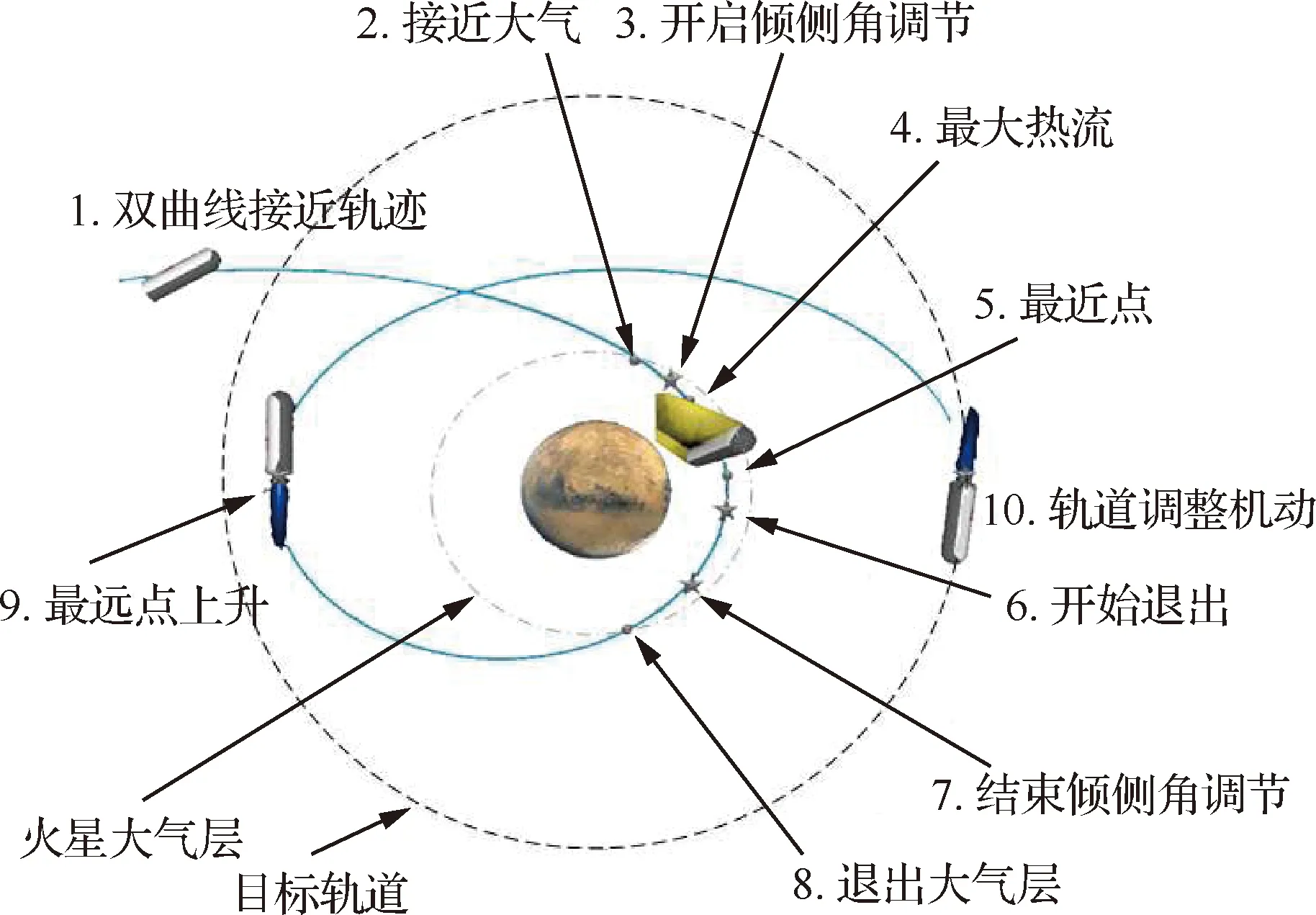
圖8 火星氣動(dòng)捕獲過(guò)程Fig.8 Process of Mars aerocapture
5) 宇航員輻射安全及醫(yī)療保健技術(shù)[79]:宇航員需要長(zhǎng)時(shí)間生活工作在輻射的微重力狹窄空間中,因此,需要研究食物營(yíng)養(yǎng)及其長(zhǎng)時(shí)間存儲(chǔ)技術(shù)、微重力下失調(diào)效應(yīng)減弱技術(shù)、輻射防護(hù)與裝備、醫(yī)療診斷與治療設(shè)備以及宇航員在孤立狹窄環(huán)境生理和心理壓力緩解等,提供周全的措施來(lái)保障宇航員的身心健康。
6) 空間推進(jìn)及能源技術(shù):由于軌道轉(zhuǎn)移時(shí)間長(zhǎng)、宇航員生活時(shí)間長(zhǎng)、設(shè)備工作時(shí)間長(zhǎng),要求具備大量的能源供設(shè)備及推力器使用,但是由于運(yùn)載能力有限,所攜帶的能源有限,因此需要研究核動(dòng)力推進(jìn)技術(shù)、空間核電技術(shù)、空間太陽(yáng)能技術(shù)以及原位資源生產(chǎn)技術(shù)等。
7) 熱防護(hù)技術(shù):在EDL過(guò)程中,探測(cè)器與火星大氣接觸摩擦產(chǎn)生巨大的熱量,熱防護(hù)技術(shù)是世界公認(rèn)的、有待進(jìn)一步提高和發(fā)展的關(guān)鍵技術(shù)之一。其與探測(cè)器的氣動(dòng)外形設(shè)計(jì)和熱防護(hù)材料等高度相關(guān),需要綜合考慮多方面因素和新材料技術(shù)水平。當(dāng)前熱防護(hù)主要突破方向包括低密度隔熱材料、疏導(dǎo)式熱防護(hù)、防熱結(jié)構(gòu)集成和熱力耦合分析等技術(shù)。
8) EDL技術(shù):EDL過(guò)程是整個(gè)探測(cè)過(guò)程中最兇險(xiǎn)的階段,整個(gè)EDL過(guò)程約為8 min的時(shí)間,要求探測(cè)器在這么短的時(shí)間內(nèi)從高超聲速狀態(tài)減速至保證安全軟著陸的速度,整個(gè)過(guò)程存在多方面約束和挑戰(zhàn),具體見(jiàn)第5節(jié)。
5 載人火星探測(cè)EDL的GNC關(guān)鍵技術(shù)
5.1 載人火星探測(cè)EDL過(guò)程面臨的挑戰(zhàn)
本文在表8中對(duì)比了無(wú)人火星探測(cè)任務(wù)與載人火星探測(cè)任務(wù)的EDL過(guò)程的部分區(qū)別。
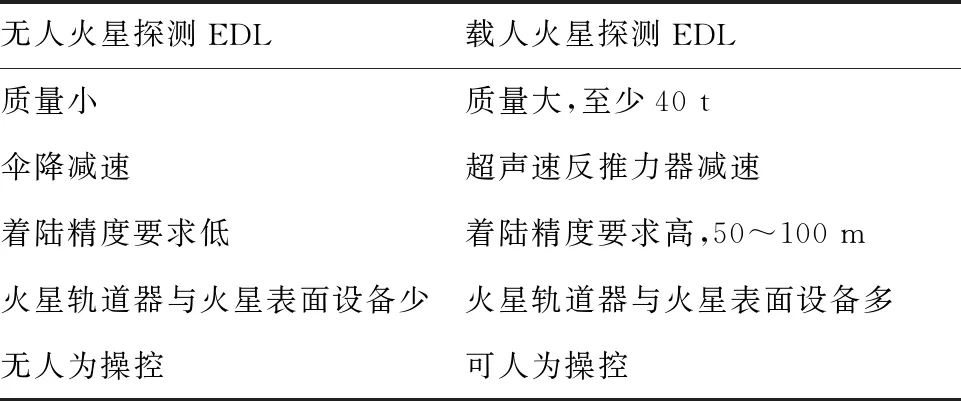
表8 無(wú)人火星探測(cè)與載人火星EDL過(guò)程對(duì)比
相比無(wú)人火星探測(cè)任務(wù),載人火星探測(cè)質(zhì)量大,至少為40 t,而且由于火星大氣稀薄,而載人火星探測(cè)的質(zhì)量大,傘降減速效果不明顯且所需減速傘過(guò)大,需要采用超聲速反推力器在探測(cè)器仍處于超聲速狀態(tài)就開(kāi)始工作進(jìn)行減速。同時(shí)載人火星探測(cè)貨運(yùn)及載人飛船是分批次到達(dá)火星表面再進(jìn)行組裝的,這就要求著陸精度為50~100 m 的著陸精度。這些要求都增加了探測(cè)任務(wù)的難度。而載人火星探測(cè)由于前期發(fā)射了相應(yīng)數(shù)量的貨運(yùn)著陸器、軌道器以及先期的無(wú)人火星探測(cè)器等表面設(shè)備,使得載人火星探測(cè)能夠利用的火星軌道器與火星表面設(shè)備的數(shù)量比無(wú)人火星探測(cè)的數(shù)量更多,載人火星探測(cè)可以利用設(shè)備進(jìn)行導(dǎo)航以提高著陸精度。同時(shí),載人著陸器在著陸過(guò)程中宇航員在必要時(shí)可進(jìn)行操控以提高安全性,這兩方面又是能夠降低任務(wù)難度的。
載人火星探測(cè)EDL過(guò)程主要有以下難點(diǎn)和約束條件[23, 73, 80]:
1) 著陸精度高:如3.2節(jié)所述,載人火星探測(cè)任務(wù)要求著陸精度為50~100 m。而火星的大氣復(fù)雜多變、著陸過(guò)程易受到陣風(fēng)等影響。為提高著陸精度,需要開(kāi)展高精度導(dǎo)航系統(tǒng)、建立高精度火星大氣模型、建立探測(cè)器高精度動(dòng)力學(xué)模型、高超聲速制導(dǎo)與控制技術(shù)等研究。
2) 火星大氣稀薄:由于火星大氣稀薄,一方面,使得采用減速傘減速的效果不明顯,進(jìn)而使得采用減速傘進(jìn)行減速的方案難以實(shí)現(xiàn),另一方面,探測(cè)器在EDL過(guò)程中減速段會(huì)持續(xù)到較低的高度,使得著陸軌跡修正、風(fēng)險(xiǎn)規(guī)避等時(shí)間和空間均不足。因此,需要開(kāi)展高超聲速氣動(dòng)外形設(shè)計(jì)、高超聲速飛行器高穩(wěn)控制、高超聲速飛行制導(dǎo)、超聲速反推力器等研究。
3) 熱效應(yīng)嚴(yán)重:探測(cè)器在火星大氣中高超聲速飛行時(shí)會(huì)產(chǎn)生大量的氣動(dòng)熱,為防止探測(cè)器被燒蝕或者保證探測(cè)器內(nèi)部器件不因高溫?fù)p壞,需要開(kāi)展低密度隔熱材料、熱防護(hù)技術(shù)、防熱結(jié)構(gòu)集成技術(shù)和熱力耦分析等技術(shù)的研究。
4) 火星環(huán)境多變,地貌崎嶇多變:一方面由于地面崎嶇多變,欺騙了探測(cè)器攜帶的雷達(dá)測(cè)高系統(tǒng),使得著陸器可能會(huì)過(guò)早打開(kāi)或者過(guò)早/過(guò)晚開(kāi)始終端下降,另一方面,在著陸的過(guò)程中,小于0.5 m的障礙難以識(shí)別,容易造成探測(cè)器與障礙發(fā)生碰撞,導(dǎo)致任務(wù)失敗,因此需要開(kāi)展高精度障礙檢測(cè)與障礙規(guī)避技術(shù)、人工操控技術(shù)、高精度測(cè)高系統(tǒng)等技術(shù)的研究。
5) 過(guò)低的有效載荷比:若載人火星探測(cè)在軌道轉(zhuǎn)移、火星軌道捕獲等過(guò)程全采用推進(jìn)方式,則到達(dá)火星表面1 t的物體,在地球低軌道的質(zhì)量約為20 t;即使火星軌道捕獲采用氣動(dòng)捕獲的方式,在地球低軌道質(zhì)量也在5~6 t左右。
6) 火星大氣是復(fù)雜多變的,受到很多因素的影響,隨著溫度、季節(jié)和光照等變化,而且火星的大氣模型呈現(xiàn)非線性,缺乏精確的建模。
7) 在EDL過(guò)程中存在通信黑障段,無(wú)線電通信不可用,且拋棄熱防護(hù)罩前,部分導(dǎo)航敏感器被遮擋不能正常工作。
8) 探測(cè)器EDL過(guò)程速度大、狀態(tài)變化快,整個(gè)過(guò)程持續(xù)的時(shí)間小于地火通信延時(shí),地面科研人員無(wú)法干預(yù)EDL過(guò)程。
9) 器載宇航計(jì)算機(jī)的計(jì)算能力有限,要求GNC設(shè)計(jì)相對(duì)簡(jiǎn)單以滿足實(shí)時(shí)性。
10) 缺乏充足的先驗(yàn)信息,無(wú)法進(jìn)行精確建模,缺乏仿真數(shù)據(jù)和設(shè)備,使得很多實(shí)驗(yàn)無(wú)法真實(shí)模擬火星探測(cè)EDL過(guò)程。
11) EDL全過(guò)程模擬技術(shù):地面的設(shè)備難以準(zhǔn)確地模擬載人火星探測(cè)的EDL過(guò)程,以提高EDL的設(shè)計(jì)可靠性與安全性。
5.2 載人火星探測(cè)EDL過(guò)程導(dǎo)航系統(tǒng)關(guān)鍵技術(shù)
載人火星探測(cè)EDL過(guò)程中,由于通信黑障段和防熱罩的原因,使得部分導(dǎo)航傳感器在某些階段或某些狀態(tài)下無(wú)法使用,限制了導(dǎo)航可用信息源,而且無(wú)法建立精確的導(dǎo)航模型,在設(shè)計(jì)及驗(yàn)證過(guò)程中需要依賴假設(shè)和預(yù)測(cè),要求導(dǎo)航系統(tǒng)具備自主性、魯棒性和自適應(yīng)能力。另外,為了在器載宇航計(jì)算機(jī)運(yùn)算能力有限的情況下保證導(dǎo)航系統(tǒng)輸出的實(shí)時(shí)性,要求導(dǎo)航算法簡(jiǎn)單易實(shí)現(xiàn)。因此,導(dǎo)航系統(tǒng)設(shè)計(jì)需要解決以下關(guān)鍵技術(shù):
1) 在線建模與校正技術(shù):將探測(cè)器的EDL動(dòng)力學(xué)模型引入導(dǎo)航系統(tǒng)中,且具備在線建模與校正能力。即實(shí)時(shí)測(cè)量氣動(dòng)參數(shù)以提高模型精度,同時(shí)建模時(shí)應(yīng)考慮高階火星重力場(chǎng)模型、火星自轉(zhuǎn)及科氏力等影響,以提高導(dǎo)航精度。
2) 構(gòu)建類GPS導(dǎo)航網(wǎng)絡(luò):隨著火星探測(cè)計(jì)劃的實(shí)施,越來(lái)越多的火星軌道環(huán)繞器運(yùn)行在繞火軌道中,可以利用這些軌道器建立類似于GPS的導(dǎo)航網(wǎng)絡(luò),以提高EDL過(guò)程的導(dǎo)航精度,如圖9 所示。
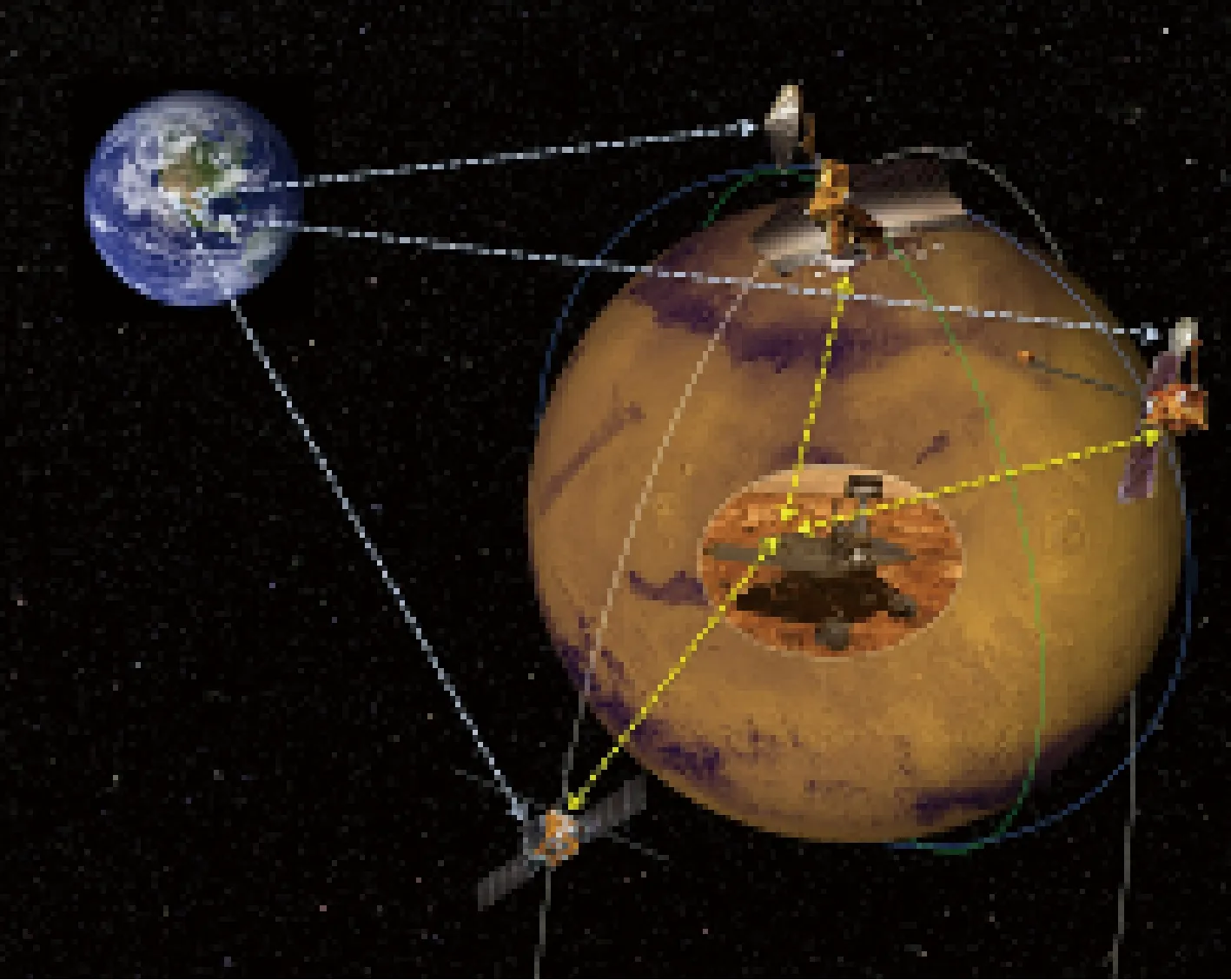
圖9 火星類GPS網(wǎng)絡(luò)示意圖Fig.9 Illustration of Mars GPS network
3) 無(wú)線電測(cè)量技術(shù):利用火星軌道器或者先期任務(wù)中留在火星表面的探測(cè)器或者前期已著陸的貨運(yùn)飛船等火星表面設(shè)備建立無(wú)線電測(cè)量系統(tǒng),進(jìn)行無(wú)線電測(cè)量導(dǎo)航,如圖10所示。
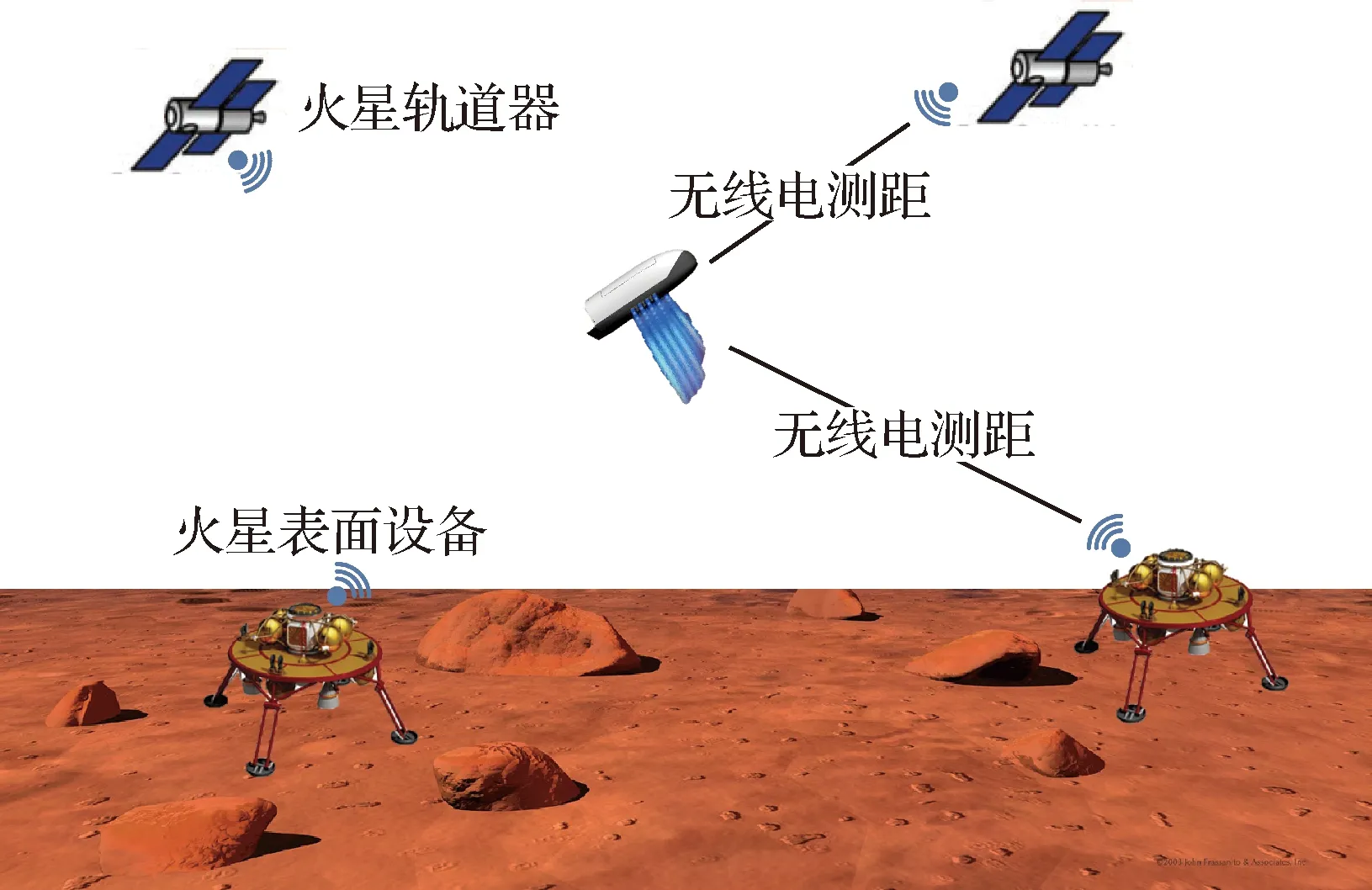
圖10 火星無(wú)線電測(cè)量導(dǎo)航示意圖Fig.10 Scheme of Mars radio-based navigation
4) 組合導(dǎo)航技術(shù)[73, 81-82]:防熱罩分離前,采用無(wú)線電測(cè)量信號(hào)、類GPS導(dǎo)航信號(hào)與慣性測(cè)量單元(IMU)導(dǎo)航信息進(jìn)行組合導(dǎo)航,如圖11[83]所示;防熱罩分離后,雷達(dá)正常工作,采用雷達(dá)、類GPS和IMU進(jìn)行組合導(dǎo)航,且為了避免相互干擾,雷達(dá)打開(kāi)后應(yīng)將無(wú)線電信號(hào)關(guān)閉;在著陸段,此時(shí)探測(cè)器的高度相對(duì)較低,視覺(jué)導(dǎo)航開(kāi)始起作用,可以利用視覺(jué)、激光雷達(dá)、類GPS與IMU進(jìn)行組合導(dǎo)航。組合導(dǎo)航技術(shù)如圖12所示。
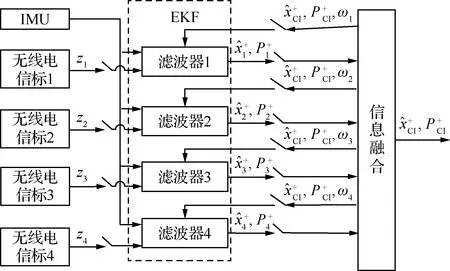
圖11 無(wú)線電組合導(dǎo)航示意圖[83]Fig.11 Integrated navigation scheme of radio and IMU[83]
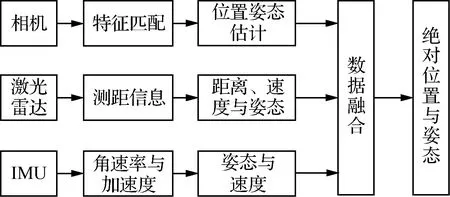
圖12 視覺(jué)、激光雷達(dá)與IMU組合導(dǎo)航示意圖Fig.12 Navigation scheme of vision, Lidar and IMU
5.3 載人火星探測(cè)EDL過(guò)程制導(dǎo)與控制關(guān)鍵技術(shù)
載人火星探測(cè)EDL過(guò)程著陸精度要求高,難以建立精確的動(dòng)力學(xué)模型用于制導(dǎo)與控制設(shè)計(jì),而且在設(shè)計(jì)過(guò)程很大程度上依賴于蒙特卡羅仿真。另外EDL過(guò)程存在不確定性,使得大氣進(jìn)入段和動(dòng)力下降段難以精確交班,且在動(dòng)力下降段所能用來(lái)進(jìn)行軌跡修正、風(fēng)險(xiǎn)規(guī)避等的時(shí)間和空間不足,這些都加大了制導(dǎo)與控制設(shè)計(jì)的難度。為此,要求制導(dǎo)與控制方式為自主閉環(huán)的制導(dǎo)與控制方式,能夠?qū)崟r(shí)規(guī)劃修正軌跡,且具備高可靠性與容錯(cuò)能力。制導(dǎo)與控制關(guān)鍵技術(shù)分為在線優(yōu)化、軌跡跟蹤、反饋制導(dǎo)與智能容錯(cuò)4個(gè)模塊,共9項(xiàng)技術(shù),如圖13所示。
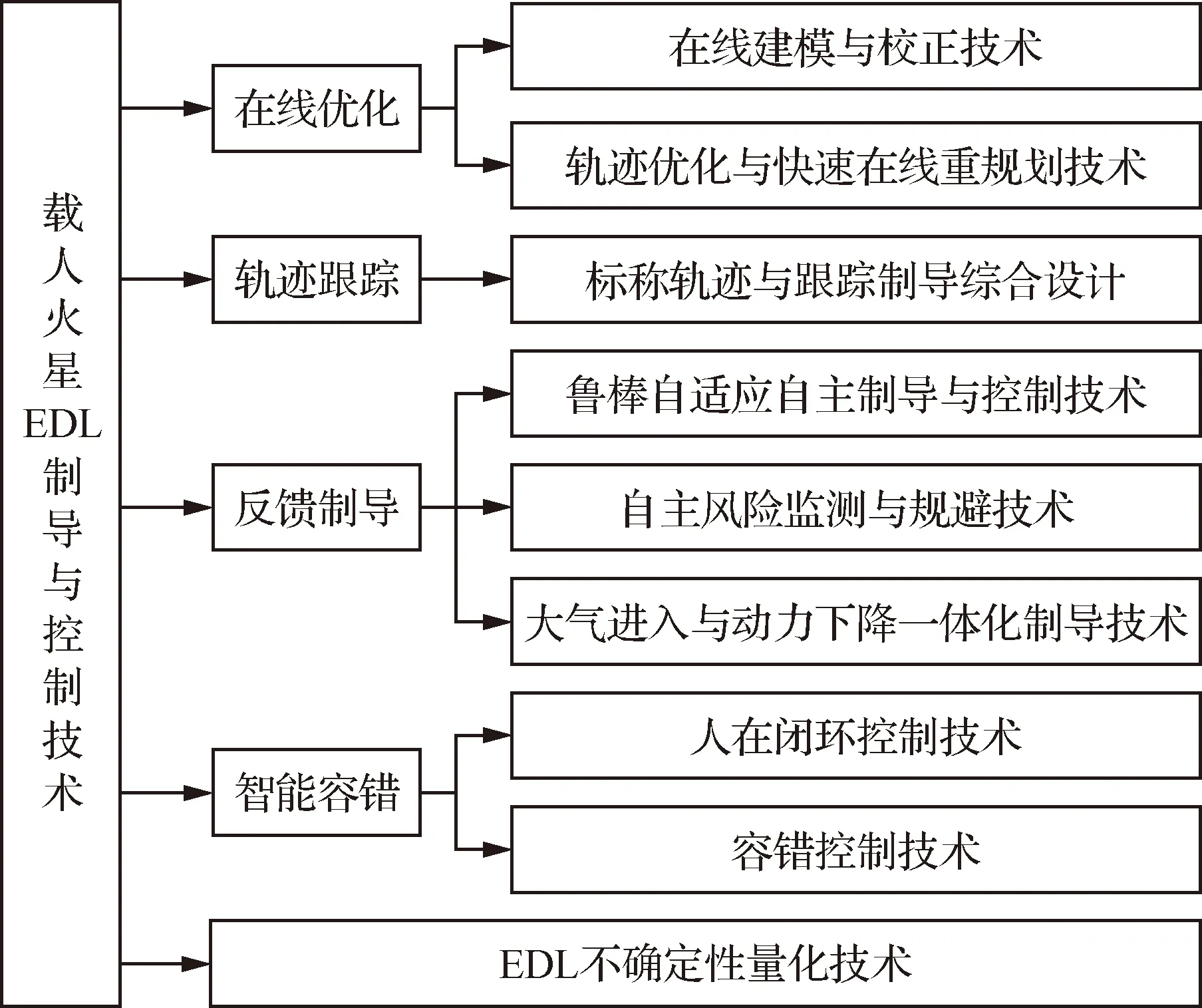
圖13 制導(dǎo)與控制技術(shù)分類Fig.13 Classification of guidance and control technology
1) 在線建模與校正技術(shù):實(shí)時(shí)測(cè)量氣動(dòng)參數(shù)在線提高模型精度;同時(shí),建模時(shí)應(yīng)考慮高階的火星重力場(chǎng)、火星自轉(zhuǎn)等因素。
2) 軌跡優(yōu)化與快速在線重規(guī)劃技術(shù):一方面,EDL過(guò)程具有大不確定性,可采用智能優(yōu)化算法進(jìn)行EDL軌跡優(yōu)化,如遺傳算法、粒子群算法等;另一方面,EDL過(guò)程探測(cè)器與標(biāo)稱軌跡間存在誤差,快速在線重規(guī)劃能夠提高著陸精度。
3) 標(biāo)稱軌跡與跟蹤制導(dǎo)綜合設(shè)計(jì):將標(biāo)稱軌跡和跟蹤制導(dǎo)分開(kāi)設(shè)計(jì)的方法若控制系統(tǒng)跟蹤標(biāo)稱軌跡的能力很弱,制導(dǎo)的性能將會(huì)嚴(yán)重下降,為了提高制導(dǎo)的精度,應(yīng)進(jìn)行標(biāo)稱軌跡與跟蹤制導(dǎo)綜合設(shè)計(jì)。
4) 魯棒自適應(yīng)自主制導(dǎo)與控制技術(shù):利用魯棒控制理論、自適應(yīng)控制理論等設(shè)計(jì)自適應(yīng)制導(dǎo)與控制算法,比如基于指令發(fā)生跟蹤器的直接模型參考自適應(yīng)跟蹤控制、滑模變結(jié)構(gòu)控制等。文獻(xiàn)[84]以速度作為判斷標(biāo)準(zhǔn),設(shè)計(jì)了自適應(yīng)動(dòng)力下降段初態(tài)的制導(dǎo)方法,如圖14所示。
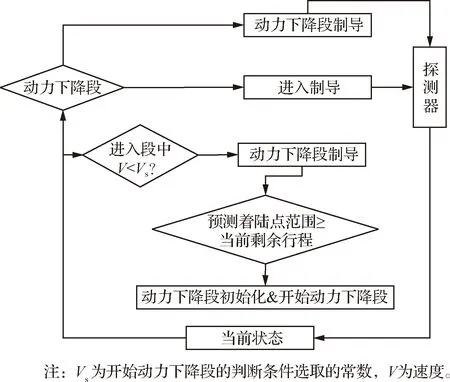
圖14 自適應(yīng)動(dòng)力下降段初態(tài)制導(dǎo)框圖[84]Fig.14 Guidance with adaptive powered descent initiation[84]
5) 自主風(fēng)險(xiǎn)監(jiān)測(cè)與規(guī)避技術(shù):火星表面碎石、溝壑等障礙會(huì)影響著陸安全,探測(cè)器應(yīng)具備自主風(fēng)險(xiǎn)監(jiān)測(cè)與規(guī)避能力,確保著陸安全,圖15中給出了基本的技術(shù)流程圖。
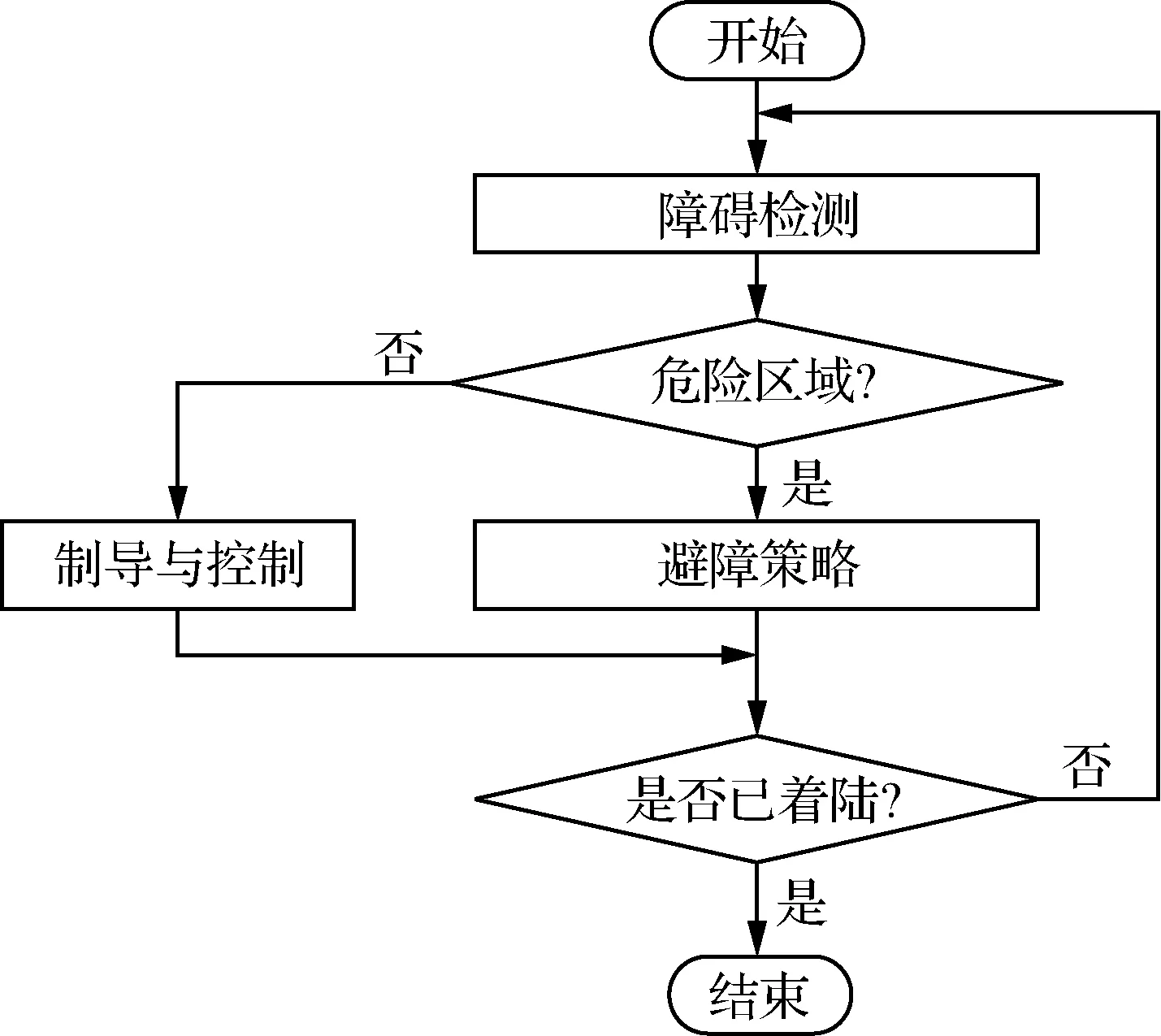
圖15 自主風(fēng)險(xiǎn)監(jiān)測(cè)與規(guī)避技術(shù)流程Fig.15 Flow chart of autonomic risk monitoring and avoidance technology
6) 大氣進(jìn)入與動(dòng)力下降一體化制導(dǎo)技術(shù):將大氣進(jìn)入段與動(dòng)力下降段綜合考慮,尋找滿足約束條件的交接點(diǎn),一體化設(shè)計(jì)滿足條件的大氣進(jìn)入與動(dòng)力下降的制導(dǎo)律。文獻(xiàn)[85]利用計(jì)算制導(dǎo)方法設(shè)計(jì)了大氣進(jìn)入段與動(dòng)力下降段一體化制導(dǎo)律,制導(dǎo)框圖如圖16所示。
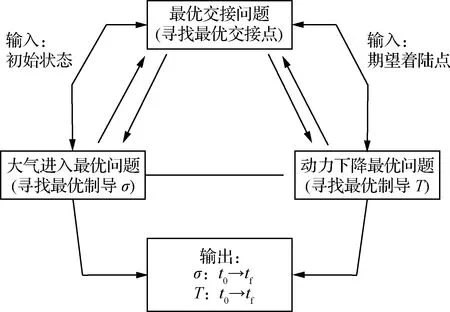
圖16 大氣進(jìn)入與動(dòng)力下降一體化制導(dǎo)設(shè)計(jì)框圖[85]Fig.16 Block diagram of integrated guidance from entry to powered descent[85]
7) 人在閉環(huán)控制技術(shù):在載人火星探測(cè)的EDL過(guò)程中,若自動(dòng)著陸系統(tǒng)故障或者其他情況發(fā)生,使得探測(cè)器無(wú)法自主完成著陸任務(wù),宇航員可以介入探測(cè)器的著陸過(guò)程,進(jìn)行著陸點(diǎn)重新選址、障礙規(guī)避和著陸控制,以保證安全,在阿波羅月球探測(cè)器已經(jīng)成功應(yīng)用了人工操縱[86]。
8) 容錯(cuò)控制技術(shù):為提高著陸過(guò)程的可靠性與安全性,容錯(cuò)控制方案必不可少,如基于改進(jìn)神經(jīng)網(wǎng)絡(luò)的容錯(cuò)控制、直接模型參考自適應(yīng)控制系統(tǒng)重構(gòu)等。
9) EDL不確定性量化技術(shù)[87-90]:無(wú)論無(wú)人火星探測(cè)還是載人火星探測(cè),在EDL過(guò)程中,探測(cè)器的初始狀態(tài)、系統(tǒng)參數(shù)、外界環(huán)境參數(shù)等均存在不確定性,傳統(tǒng)采用蒙特卡羅對(duì)不確定性進(jìn)行分析的方法計(jì)算效率低,因此需要開(kāi)展EDL不確定性量化技術(shù)的研究,為EDL不確定性的影響提供高精度且高效分析。
6 結(jié) 論
目前美國(guó)、歐空局等在無(wú)人火星探測(cè)方面已經(jīng)取得了顯著的成績(jī),近些年來(lái)以美國(guó)為首的國(guó)外航天機(jī)構(gòu)已經(jīng)開(kāi)展了不少關(guān)于載人火星探測(cè)任務(wù)的方案及技術(shù)研究,并取得了豐富的研究成果。本文旨在調(diào)研國(guó)外目前載人火星探測(cè)的方案及技術(shù)研究成果,總結(jié)了載人火星探測(cè)的體系構(gòu)成、集結(jié)方式和存在的挑戰(zhàn),系統(tǒng)的針對(duì)EDL過(guò)程存在的挑戰(zhàn)給出了GNC相應(yīng)的關(guān)鍵技術(shù),為中國(guó)未來(lái)的載人火星探測(cè)的方案及技術(shù)研究提供一定的參考和學(xué)術(shù)思路。
